


Generalized Logistic Maps in the Complex Plane: Structure, Symmetry, and Escape-Time Dynamics


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Generalised Logistic Map and Its Mandelbrot and Julia Sets
2.1. Escape Criterion
2.2. Symmetries of the Julia Sets
2.3. Symmetries of the Mandelbrot Set
3. Graphical Examples
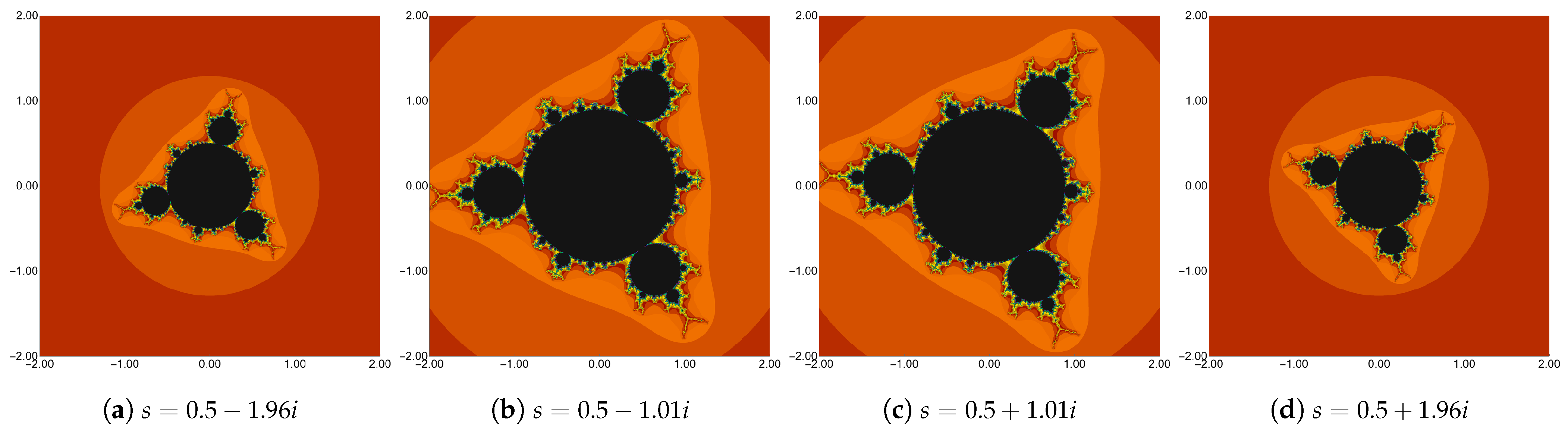
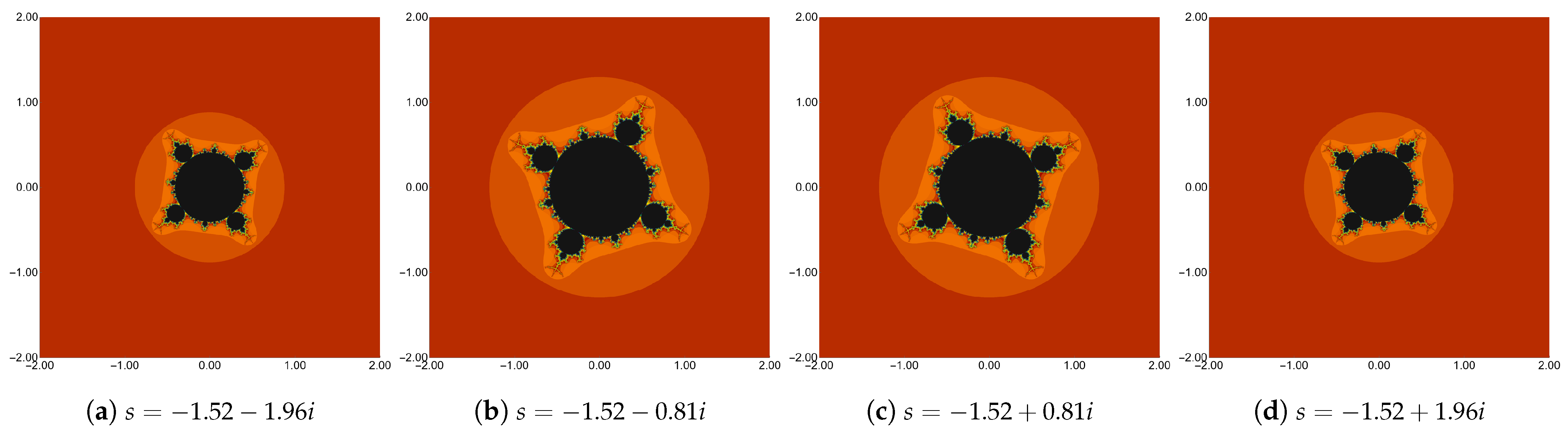
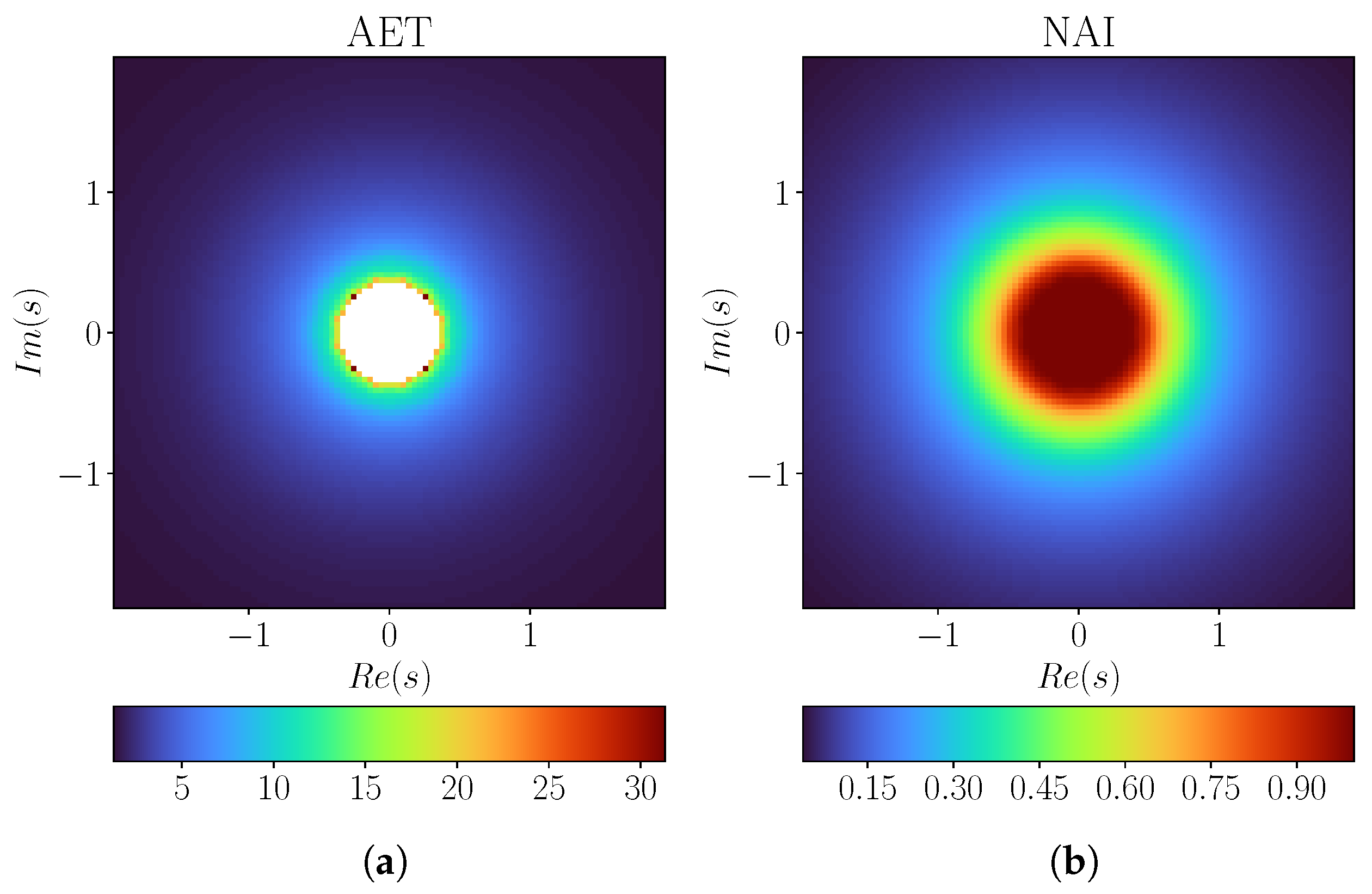
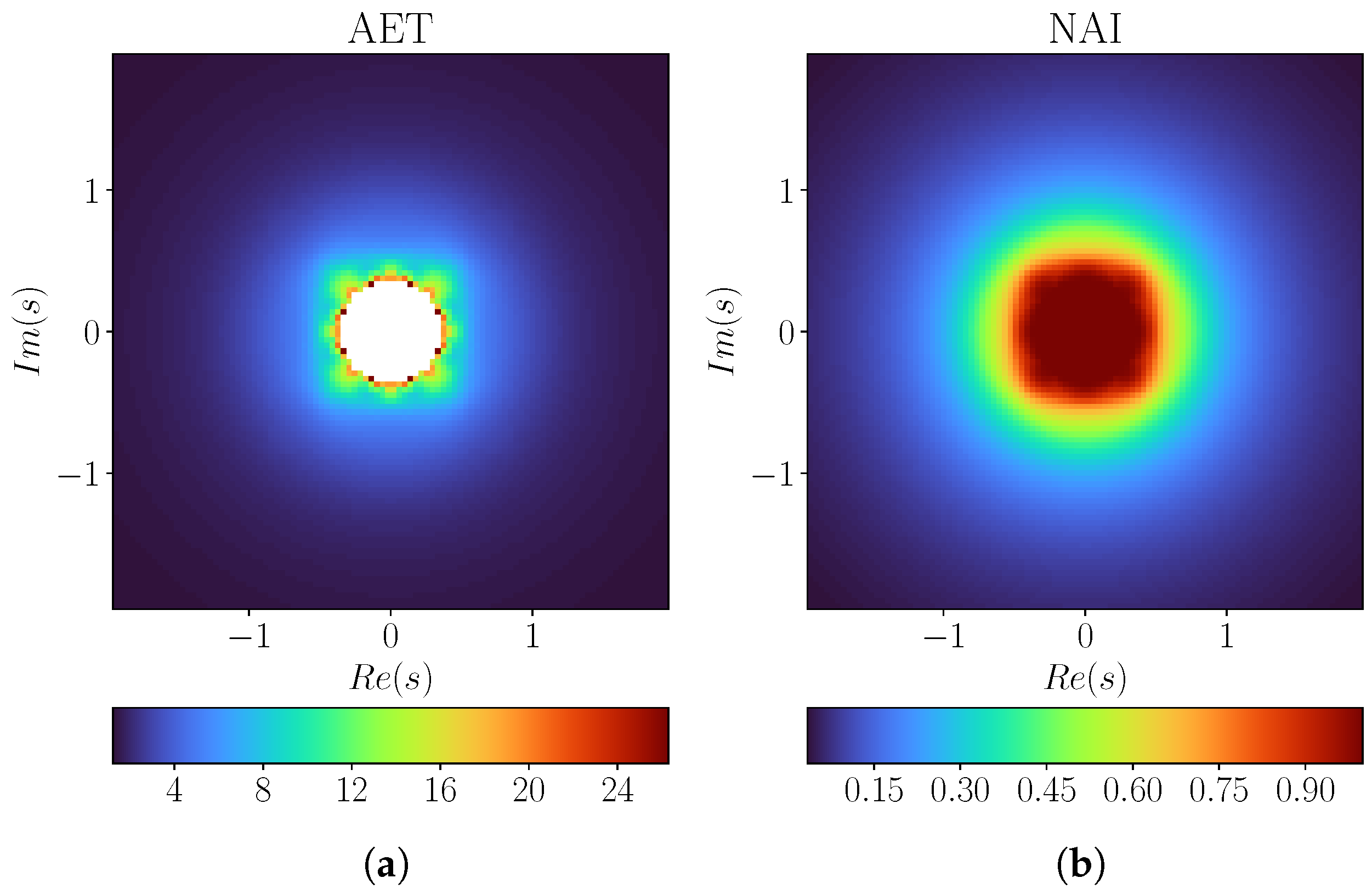
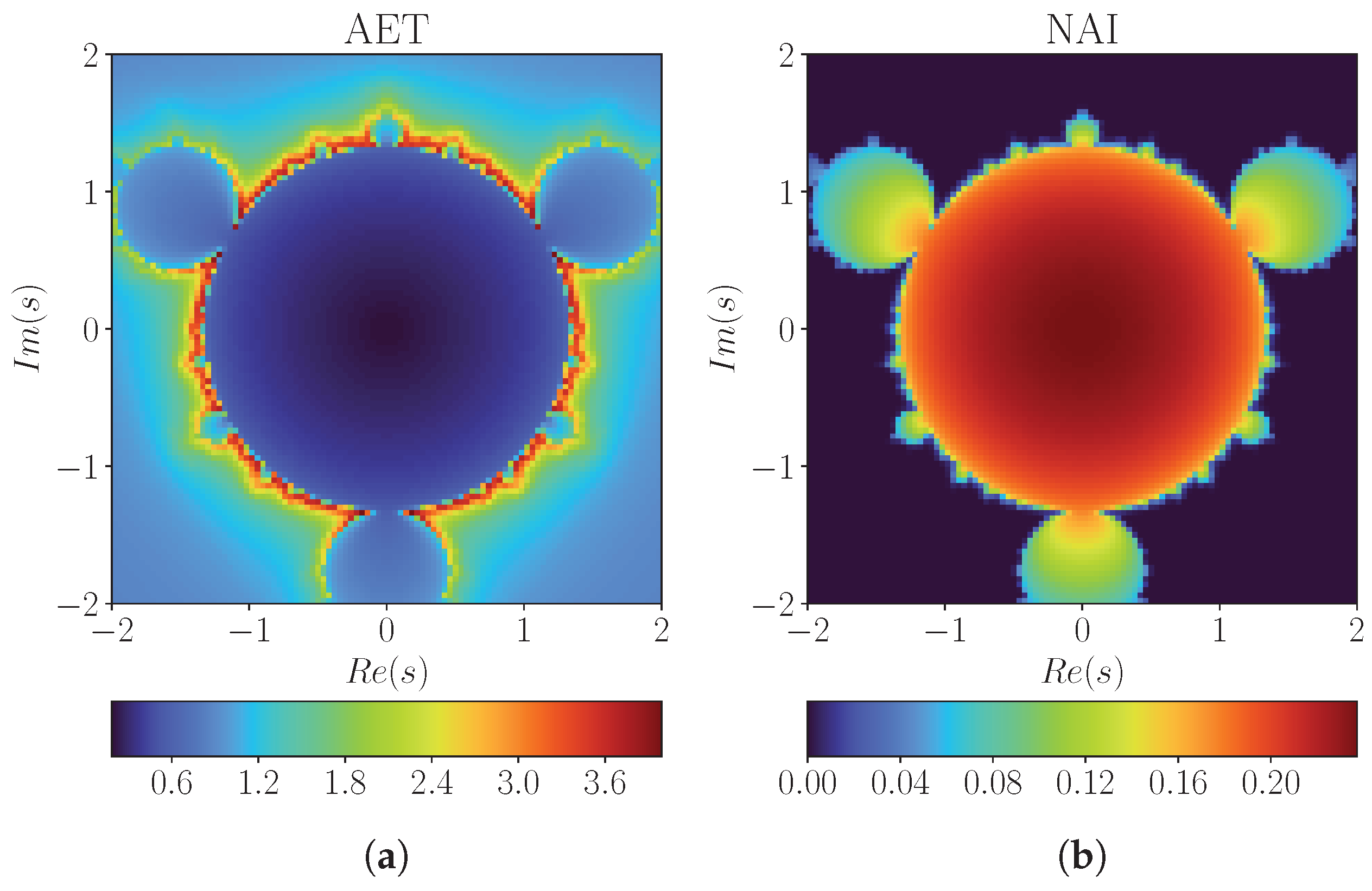
3.1. Mandelbrot Sets
| Algorithm 1: Approximation of Mandelbrot set |
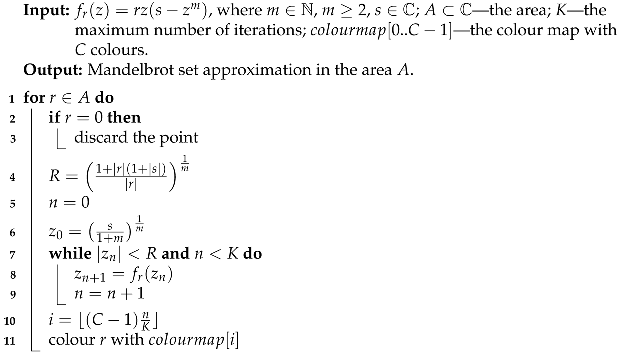 |
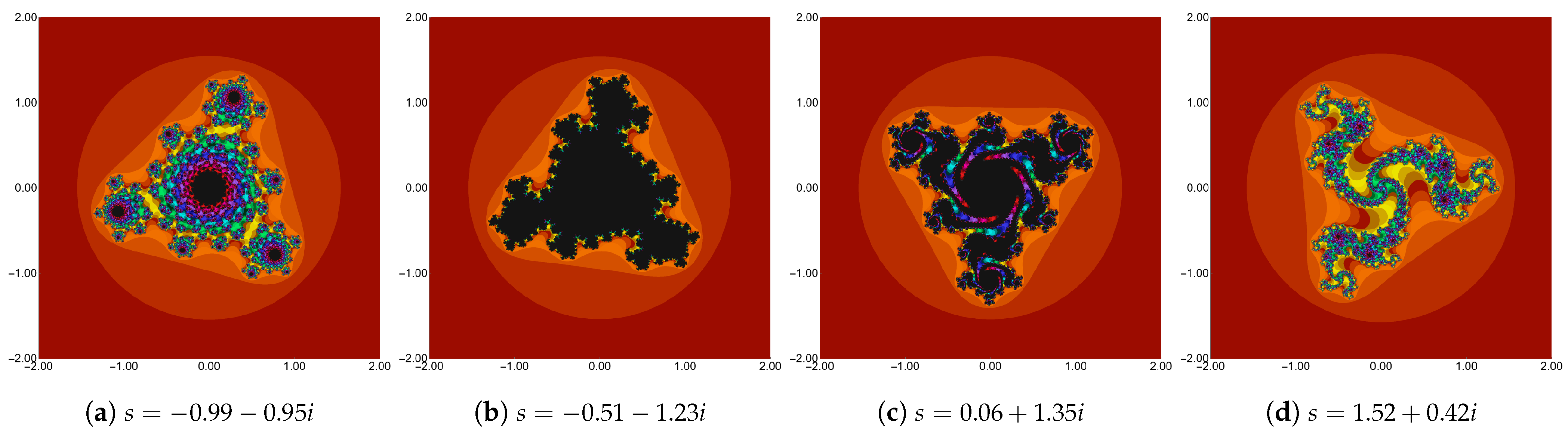
3.2. Julia Sets
| Algorithm 2: Approximation of filled Julia set |
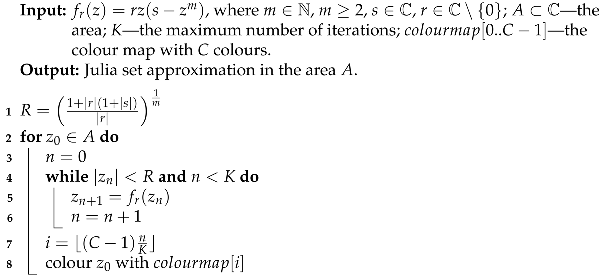 |
4. Numerical Examples
4.1. Mandelbrot Sets
4.2. Julia Sets
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Mandelbrot, B. The Fractal Geometry of Nature; W.H. Freeman and Company: San Francisco, CA, USA, 1982. [Google Scholar]
- Feijs, L.; Toeters, M. Exploring a Taxicab-based Mandelbrot-like Set. In Proceedings of the Bridges 2019: Mathematics, Art, Music, Architecture, Education, Culture, Linz, Austria, 16–20 July 2019; Goldstine, S., McKenna, D., Fenyvesi, K., Eds.; Tessellations Publishing: Phoenix, AZ, USA, 2019; pp. 107–114. [Google Scholar]
- Wang, W.; Zhang, G.; Yang, L.; Wang, W. Research on garment pattern design based on fractal graphics. EURASIP J. Image Video Process. 2019, 2019, 29. [Google Scholar] [CrossRef]
- Toeters, M.; Feijs, L.; van Loenhout, D.; Tieleman, C.; Virtala, N.; Jaakson, G.K. Algorithmic Fashion Aesthetics: Mandelbrot. In Proceedings of the 23rd International Symposium on Wearable Computers (ISWC ’19), New York, NY, USA, 9–13 September 2019; pp. 322–328. [Google Scholar] [CrossRef]
- Venneri, F.; Costanzo, S.; Borgia, A. Fractal Metasurfaces and Antennas: An Overview for Advanced Applications in Wireless Communications. Appl. Sci. 2024, 14, 2843. [Google Scholar] [CrossRef]
- Yang, J.; Feng, X.; Chen, Y.; Yan, P.; Zhang, H. A secure fractal compression scheme based on irregular Latin square, Julia and 2D-FCICM. Digit. Signal Process. 2024, 155, 104725. [Google Scholar] [CrossRef]
- Devaney, R. A First Course in Chaotic Dynamical Systems: Theory and Experiment, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2020. [Google Scholar]
- Rani, M.; Kumar, M. Circular saw Mandelbrot set. In Proceedings of the the 14th WSEAS International Conference on Applied Mathematics, Puerto De La Cruz, Tenerife Canary Islands, Spain, 14–16 December 2009; pp. 131–136. [Google Scholar]
- Rani, M.; Kumar, V. Superior Mandelbrot set. J. Korea Soc. Math. Educ. Ser. D Res. Math. Educ. 2004, 8, 279–291. [Google Scholar]
- Rani, M.; Kumar, V. Superior Julia sets. J. Korea Soc. Math. Educ. Ser. D Res. Math. Educ. 2004, 8, 261–277. [Google Scholar]
- Adhikari, N.; Sintunavarat, W. The Julia and Mandelbrot Sets for the Function zp − qz2 + rz + sin cw Exhibit Mann and Picard–Mann Orbits Along with s-convexity. Chaos Solitons Fractals 2024, 181, 114600. [Google Scholar] [CrossRef]
- Tanveer, M.; Nazeer, W.; Gdawiec, K. On the Mandelbrot Set of zp + log ct via the Mann and Picard–Mann Iterations. Math. Comput. Simul. 2023, 209, 184–204. [Google Scholar] [CrossRef]
- Kumari, S.; Gdawiec, K.; Nandal, A.; Kumar, N.; Chugh, R. On the Viscosity Approximation Type Iterative Method and Its Non-linear Behaviour in the Generation of Mandelbrot and Julia Sets. Numer. Algorithms 2024, 96, 211–236. [Google Scholar] [CrossRef]
- Srivastava, R.; Tassaddiq, A.; Kasmani, R. Escape Criteria Using Hybrid Picard S-Iteration Leading to a Comparative Analysis of Fractal Mandelbrot Sets Generated with S-Iteration. Fractal Fract. 2024, 8, 116. [Google Scholar] [CrossRef]
- Antal, S.; Tomar, A.; Prajapati, D.; Sajid, M. Variants of Julia and Mandelbrot sets as fractals via Jungck–Ishikawa fixed point iteration system with s-convexity. AIMS Math. 2022, 7, 10939–10957. [Google Scholar] [CrossRef]
- Tomar, A.; Prajapati, D.; Antal, S.; Rawat, S. Variants of Mandelbrot and Julia fractals for higher-order complex polynomials. Math. Methods Appl. Sci. 2022; in press. [Google Scholar] [CrossRef]
- Farris, S. Generalized Mandelbrot Sets of a Family of Polynomials Pn(z) = zn + z + c; (n ≥ 2). Int. J. Math. Math. Sci. 2022, 2022, 4510088. [Google Scholar] [CrossRef]
- Cuzzocreo, D.; Devaney, R. Simple Mandelpinski Necklaces for z2 + λ/z2. In Difference Equations, Discrete Dynamical Systems and Applications; Alsedà i Soler, L., Cushing, J., Elaydi, S., Pinto, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2016; pp. 63–72. [Google Scholar] [CrossRef]
- Mork, L.; Ulness, D. Visualization of Mandelbrot and Julia Sets of Möbius Transformations. Fractal Fract. 2021, 5, 73. [Google Scholar] [CrossRef]
- Rani, M.; Agarwal, R. Generation of Fractals from Complex Logistic Map. Chaos Solitons Fractals 2009, 42, 447–452. [Google Scholar] [CrossRef]
- Rani, M.; Agarwal, R. Effect of Noise on Julia Sets Generated by Logistic Map. In Proceedings of the 2010 The 2nd International Conference on Computer and Automation Engineering, Singapore, 26–28 February 2010; pp. 55–59. [Google Scholar] [CrossRef]
- Prasad, B.; Katiyar, K. Stability and Fractal Patterns of Complex Logistic Map. Cybern. Inf. Technol. 2014, 14, 14–24. [Google Scholar] [CrossRef]
- Ahmed, W.; Abbas, S.; Khamees, M.; Jaber, M. Development of Mandelbrot set for the logistic map with two parameters in the complex plane. East.-Eur. J. Enterp. Technol. 2021, 6, 47–56. [Google Scholar] [CrossRef]
- Xingyuan, W.; Qingyong, L. Reverse Bifurcation and Fractal of the Compound Logistic Map. Commun. Nonlinear Sci. Numer. Simul. 2008, 13, 913–927. [Google Scholar] [CrossRef]
- Kumari, S.; Gdawiec, K.; Nandal, A.; Postolache, M.; Chugh, R. A Novel Approach to Generate Mandelbrot Sets, Julia Sets and Biomorphs via Viscosity Approximation Method. Chaos Solitons Fractals 2022, 163, 112540. [Google Scholar] [CrossRef]
- Tassaddiq, A.; Tanveer, M.; Azhar, M.; Nazeer, W.; Qureshi, S. A Four Step Feedback Iteration and Its Applications in Fractals. Fractal Fract. 2022, 6, 662. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gdawiec, K.; Tanveer, M. Generalized Logistic Maps in the Complex Plane: Structure, Symmetry, and Escape-Time Dynamics. Axioms 2025, 14, 404. https://doi.org/10.3390/axioms14060404
Gdawiec K, Tanveer M. Generalized Logistic Maps in the Complex Plane: Structure, Symmetry, and Escape-Time Dynamics. Axioms. 2025; 14(6):404. https://doi.org/10.3390/axioms14060404
Chicago/Turabian StyleGdawiec, Krzysztof, and Muhammad Tanveer. 2025. "Generalized Logistic Maps in the Complex Plane: Structure, Symmetry, and Escape-Time Dynamics" Axioms 14, no. 6: 404. https://doi.org/10.3390/axioms14060404
APA StyleGdawiec, K., & Tanveer, M. (2025). Generalized Logistic Maps in the Complex Plane: Structure, Symmetry, and Escape-Time Dynamics. Axioms, 14(6), 404. https://doi.org/10.3390/axioms14060404