
Influence of a Given Field of Temperature on the Blood Pressure Variation: Variational Analysis, Numerical Algorithms and Simulations


{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
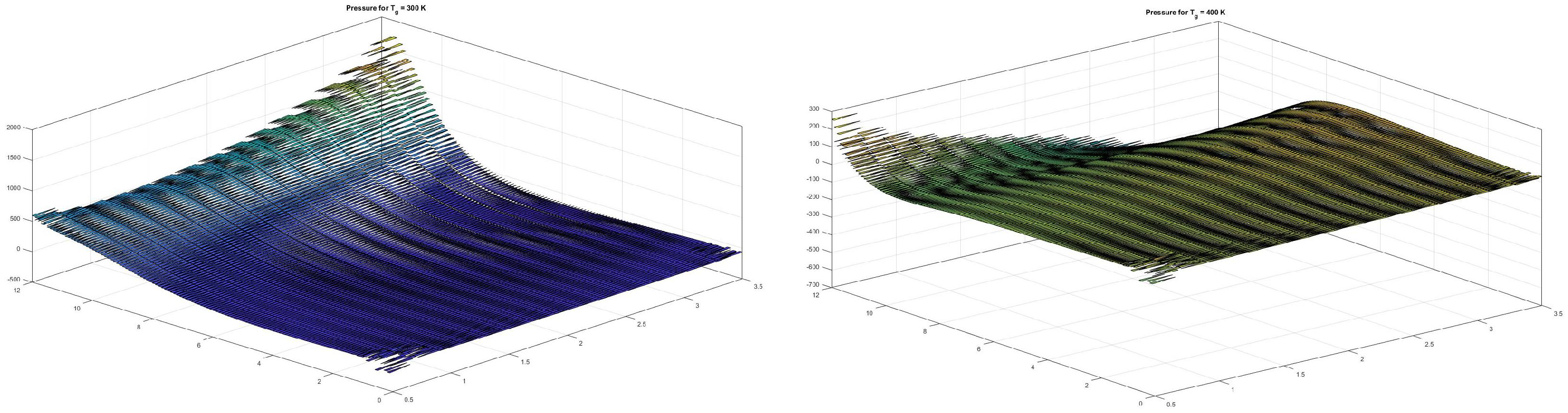
- The way in which the changes in the exterior temperature influence the blood pressure variations. For example, Ref. [16] says that high ambient temperatures are associated with lower blood pressure; more specifically systolic blood pressure decreases by 5 mm Hg as the exterior medium temperature increases by 10 °C. Another article, Ref. [17], analyzes in more detail the variation in blood pressure with the variation in exterior temperature. So, when the exterior temperature is between 10 °C and 27 °C, the pressure decreases as the temperature increases, but if the temperature is higher than 27 °C, the pressure increases. Another study, Ref. [18], shows a significant influence of temperature in a closed space on blood pressure variation.
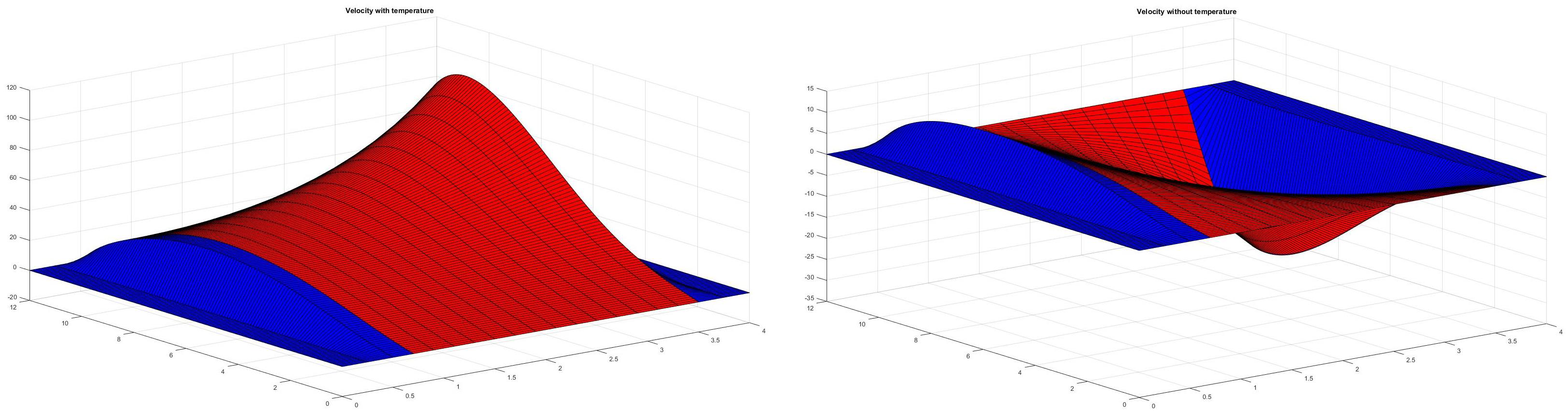
- A comparison between the thermal FSI and FSI models. These simulations highlight the fact that taking into account temperature variations in the two media determines major changes, for example, regarding the longitudinal velocity profile in the fluid.
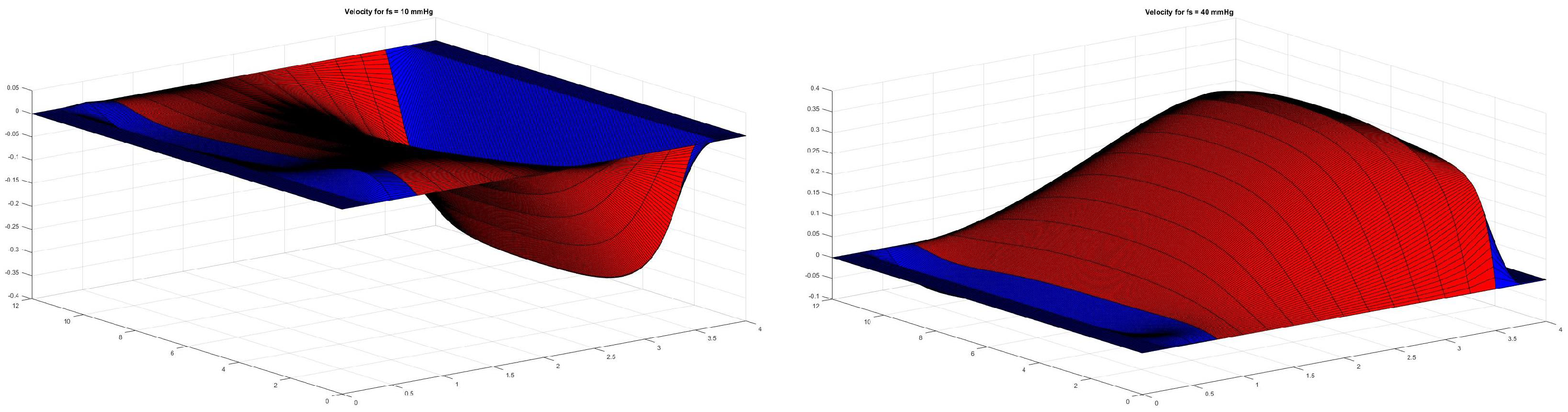
- The influence of the forces acting in the elastic domain on the fluid longitudinal velocity. This study is of practical interest for the blood flow through vessels, representing one of the most important applications of the FSI. We give two examples that support this assertion. The first example concerns blood flow in venous insufficiency. The blood flow through a leg vein has an anti-gravity sense; when the vein loses its elasticity, this sense is modified, determining the reflux of the blood, which leads to medical complications. These complications are reduced by using elastic stockings. A mathematical analysis of how the compression exerted by the elastic stocking influences blood reflux can be found in [6]. The second example is related to blood flow in stenotic coronary arteries. In [19] the influence of the stenotic coronary arterial wall compliance on the arterial blood flow is analyzed.
2. Presentation of the Mathematical Model
- The geometric data: (the fluid domain), (the solid domain), (the union of the previous two domains), (the fluid boundary), (the solid boundary), (the interface between the two media);
- the positive constants: (which gives the time interval), , (the thermal expansion coefficients corresponding to the two phases), , (the thermal conductivities), , (the specific heats), , (the densities), (the fluid viscosity), (the bulk modulus), where , are the Lamé coefficients;
- the matrix-valued elasticity coefficients , i, with the following:where E is a positive constant representing Young’s modulus and is a constant representing Poisson’s coefficient. The Lamé constants are linked to the elasticity modulus E and the Poisson ratio by
- (the gravitational acceleration);
- the functions (the initial velocity), (the initial temperature), with , , , (the internal heat sources), (the force in ) and (a given temperature on a part of the elastic domain boundary).
3. The Variational Problem with Pressure
4. The Viscoelastic Variational Problem with Pressure
5. The Numerical Approximation Scheme with Pressure
- Uniqueness
6. Uzawa’s Algorithm
7. Numerical Simulations
7.1. Pressure Dynamics When Changing the Temperature
7.2. Temperature Influence on the Fluid–Structure Coupling
7.3. Velocity Dynamics When Changing the Forces
7.4. Convergence
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Grandmont, C.; Vergnet, F. Existence for a Quasi-Static Interaction Problem Between a Viscous Fluid and an Active Structure. J. Math. Fluid Mech. 2021, 23, 45. [Google Scholar] [CrossRef]
- Bociu, L.; Čanić, S.; Muha, B.; Webster, J.T. Multilayered Poroelasticity Interacting with Stokes Flow. SIAM J. Math. Anal. 2021, 53, 6243–6279. [Google Scholar] [CrossRef]
- Panasenko, G.P.; Stavre, R. Viscous Fluid–Thin Elastic Plate Interaction: Asymptotic Analysis with Respect to the Rigidity and Density of the Plate. Appl. Math. Optimiz. 2020, 81, 141–194. [Google Scholar] [CrossRef]
- Panasenko, G.P.; Stavre, R. Three Dimensional Asymptotic Analysis of an Axisymmetric Flow in a Thin Tube with Thin Stiff Elastic Wall. J. Math. Fluid Mech. 2020, 22, 20. [Google Scholar] [CrossRef]
- Stavre, R. Optimization of the blood pressure with the control in coefficients. Evol. Equ. Control. Theory 2020, 9, 131–151. [Google Scholar] [CrossRef]
- Stavre, R. A boundary control problem for the blood flow in venous insufficiency. The general case. Nonlinear Anal. Real World Appl. 2016, 29, 98–116. [Google Scholar] [CrossRef]
- Crosetto, P.; Reymond, P.; Deparis, S.; Kontaxakis, D.; Stergiopulos, N.; Quarteroni, A. Fluid–structure interaction simulation of aortic blood flow. Comput. Fluids 2011, 43, 46–57. [Google Scholar] [CrossRef]
- Deparis, S.; Discacciati, M.; Fourestey, G.; Quarteroni, A. Fluid–structure algorithms based on Steklov–Poincaré operators. Comput. Methods Appl. Mech. Eng. 2006, 195, 5797–5812. [Google Scholar] [CrossRef]
- Richter, T. Fluid-structure Interactions, Models, Analysis and Finite Elements. In Lecture Notes in Computational Science and Engineering; Barth, T.J., Griebel, M., Keyes, D.E., Nieminen, R.M., Roose, D., Schlick, T., Eds.; Springer: Berlin/Heidelberg, Germany, 2017; Volume 118. [Google Scholar] [CrossRef]
- Diwate, M.; Tawade, J.V.; Janthe, P.G.; Garayev, M.; El-Meligy, M.; Kulkarni, N.; Gupta, M.; Khan, M.I. Numerical solutions for unsteady laminar boundary layer flow and heat transfer over a horizontal sheet with radiation and nonuniform heat Source/Sink. J. Radiat. Res. Appl. Sci. 2024, 17, 101196. [Google Scholar] [CrossRef]
- Kulkarni, N.; Al-Dossari, M.; Tawade, J.; Alqahtani, A.; Khan, M.I.; Abdullaeva, B.; Waqas, M.; Khedher, N.B. Thermoelectric energy harvesting from geothermal micro-seepage. Int. J. Hydrogen Energy 2024, 93, 925–936. [Google Scholar] [CrossRef]
- Maity, D.; Takahashi, T. Existence and uniqueness of strong solutions for the system of interaction between a compressible Navier-Stokes-Fourier fluid and a damped plate equation. Nonlinear Anal. Real World Appl. 2021, 59, 103267. [Google Scholar] [CrossRef]
- Mácha, V.; Muha, B.; Šárka Nečasová, Š.; Roy, A.; Trifunović, S. Existence of a weak solution to a nonlinear fluid-structure interaction problem with heat exchange. Commun. Partial. Differ. Equ. 2022, 47, 1591–1635. [Google Scholar] [CrossRef]
- Feppon, F.; Allaire, G.; Bordeu, F.; Cortial, J.; Dapegny, C. Shape optimization of a coupled thermal fluid-structure problem in a level set mesh evolution framework. Bol. Soc. Esp. Mat. Apl. 2019, 76, 413–458. [Google Scholar] [CrossRef]
- Ciorogar, A.; Stavre, R. A Thermal Fluid–Structure Interaction Problem: Modeling, Variational and Numerical Analysis. J. Math. Fluid Mech. 2023, 25, 37. [Google Scholar] [CrossRef]
- Kunutsor, S.K.; Powles, J.W. The effect of ambient temperature on blood pressure in a rural West African adult population: A cross-sectional study. Cardiovasc. J. Afr. 2010, 21, 17–20. [Google Scholar] [PubMed]
- Xu, D.; Zhang, Y.; Wang, B.; Yang, H.; Ban, J.; Liu, F.; Li, T. Acute effects of temperature exposure on blood pressure: An hourly level panel study. Environ. Int. 2019, 124, 493–500. [Google Scholar] [CrossRef] [PubMed]
- Hayashi, Y.; Ikaga, T.; Hoshi, T.; Ando, S. Effects of Indoor Air Temperature on Blood Pressure among Nursing Home Residents in Japan. In Proceedings of the 7th International Conference on Energy and Environment of Residential Buildings, Brisbane, Australia, 20–24 November 2016. [Google Scholar]
- Carvalho, V.; Lopes, D.; Silva, J.; Puga, H.; Lima, R.A.; Teixeira, J.C.; Teixeira, S. Comparison of CFD and FSI simulations of blood flow in stenotic coronary arteries. In Applications of Computational Fluid Dynamics Simulation and Modeling; IntechOpen: London, UK, 2022. [Google Scholar] [CrossRef]
- Temam, R. Navier-Stokes Equations; North-Holland: Amsterdam, The Netherlands, 1984. [Google Scholar]
- Galdi, G.P. An Introduction to the Mathematical Theory of Navier–Stokes Equations; Springer-Verlag: New York, NY, USA, 1994. [Google Scholar]
- Girault, V.; Raviart, P.A. Finite element approximation of the Navier-Stokes equations. In Lecture Notes in Mathematics; Dold, A., Eckmann, B., Eds.; Springer-Verlag: New York, NY, USA, 1979; 749p. [Google Scholar]
- Abdalla, A.; Khanafer, K.; Vafai, K. Fluid-Structure Interactions in a Tissue During Hyperthermia. Numer. Heat Transf. Part Appl. 2014, 66, 1–6. [Google Scholar] [CrossRef]
- Zhang, Z.; Yang, Z.; Nie, H.; Xu, L.; Yue, J.; Huang, Y. A thermal stress analysis of fluid–structure interaction applied to boiler water wall. Asia-Pac. J. Chem. Eng. 2020, 15, e2537. [Google Scholar] [CrossRef]
- Baksamawi, H.A.; Mostapha, A.; Brill, A.; Vigolo, D.; Alexiadis, A. Modelling Particle Agglomeration on Through Elastic Valves Under Flow. ChemEngineering 2021, 5, 40. [Google Scholar] [CrossRef]
- Gataulin, Y.A.; Yukhnev, A.D.; Rosukhovskiy, D.A. Fluid–structure interactions modeling the venous valve. J. Phys. Conf. Ser. 2018, 1128, 012009. [Google Scholar] [CrossRef]
- Hajati, Z.; Moghanlou, F.S.; Vajdi, M.; Razavi, S.E.; Matin, S. Fluid-structure interaction of blood flow around a vein valve. Bioimpacts 2020, 10, 169–175. [Google Scholar] [CrossRef] [PubMed]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Stavre, R.; Ciorogar, A. Influence of a Given Field of Temperature on the Blood Pressure Variation: Variational Analysis, Numerical Algorithms and Simulations. Axioms 2025, 14, 88. https://doi.org/10.3390/axioms14020088
Stavre R, Ciorogar A. Influence of a Given Field of Temperature on the Blood Pressure Variation: Variational Analysis, Numerical Algorithms and Simulations. Axioms. 2025; 14(2):88. https://doi.org/10.3390/axioms14020088
Chicago/Turabian StyleStavre, Ruxandra, and Alexandra Ciorogar. 2025. "Influence of a Given Field of Temperature on the Blood Pressure Variation: Variational Analysis, Numerical Algorithms and Simulations" Axioms 14, no. 2: 88. https://doi.org/10.3390/axioms14020088
APA StyleStavre, R., & Ciorogar, A. (2025). Influence of a Given Field of Temperature on the Blood Pressure Variation: Variational Analysis, Numerical Algorithms and Simulations. Axioms, 14(2), 88. https://doi.org/10.3390/axioms14020088