1. Introduction
Nonindependent variables arise when at least two variables do not vary independently, and such variables are often characterized by their covariance matrices, distribution functions, copulas, and weighted distributions (see, e.g., [
1,
2,
3,
4,
5,
6,
7]). Recently, dependency models provide explicit functions that link these variables together by means of additional independent variables [
8,
9,
10,
11,
12]. Models with nonindependent input variables, including functions subjected to constraints, are widely encountered in different scientific fields, such as data analysis, quantitative risk analysis, and uncertainty quantification (see, e.g., [
13,
14,
15]).
Analyzing such functions requires being able to calculate or to compute their dependent gradients, that is, the gradients that account for the dependencies among the inputs. Recall that gradients are involved in (i) inverse problems and optimization (see, e.g., [
16,
17,
18,
19,
20]), (ii) exploring complex mathematical models or simulators (see [
21,
22,
23,
24,
25,
26,
27,
28] for independent inputs and [
9,
15] for nonindependent variables); (iii) Poincaré inequalities and equalities [
9,
28,
29,
30], and recently in (iv) the derivative-based ANOVA (i.e., exact expansions) of functions [
28]. While the first-order derivatives of functions with nonindependent variables have been derived in [
9] for screening dependent inputs of high-dimensional models, the theoretical expressions of the gradients of such functions (dependent gradients) have been introduced in [
15], thereby enhancing the difference between the gradients and the first-order partial derivatives when the input variables are dependent or correlated.
In high-dimensional settings and for time-demanding models, having an efficient approach for computing the dependent gradients provided in [
15] using a few model evaluations is worth investigating. So far, the adjoint methods can provide the exact classical gradients for some classes of PDE/ODE-based models [
31,
32,
33,
34,
35,
36]. Additionally, Richardson’s extrapolation and its generalization considered in [
37] provide accurate estimates of the classical gradients using a number of model runs that strongly depends on the dimensionality. In contrast, the Monte Carlo approach allows for computing the classical gradients using a number of model runs that can be very less than the dimensionality (i.e.,
) [
17,
38,
39]. The Monte Carlo approach is a consequence of the Stokes theorem, which claims that the expectation of a function evaluated at a random point about
is the gradient of a certain function. Such a property leads to randomized approximations of the classical gradients in derivative-free optimization or zero-order stochastic optimization (see [
16,
18,
19,
20] and the references therein). Such approximations are also relevant for applications in which the computations of the gradients are impossible [
20].
Most of the randomized approximations of the classical gradients, including the Monte Carlo approach, rely on randomized kernels and/or random vectors that are uniformly distributed on the unit ball. The qualities of such approximations are often assessed by the upper bounds of the biases and the rates of convergence. The upper bounds provided in [
19,
20,
40] depend on the dimensionality in general.
In this paper, we propose new surrogates of the gradients of smooth functions with nonindependent inputs and the associated estimators that comply with the following requirements:
They are simple and applicable to a wide class of functions by making use of model evaluations at randomized points, which are only based on independent, central, and symmetric variables;
They lead to a dimension-free upper bound of the bias, and they improve the best known upper bounds of the bias for the classical gradients;
They lead to the optimal and parametric (mean squared error) rates of convergence;
They are going to increase the computational efficiency and accuracy of the gradients estimates by means of a set of constraints.
The surrogates of the dependent gradients are derived in
Section 3 by combining the properties of (i) the generalized Richardson extrapolation approach thanks to a set of constraints and (ii) the Monte Carlo approach based only on independent random variables that are symmetrically distributed about zero. Such expressions are followed by their order of approximations, biases, and a comparison with known results for the classical gradients. We also provide the estimators of such surrogates and their associated mean squared errors, including the rates of convergence for a wide class of functions (see
Section 3.3). A number of numerical comparisons is considered so as to assess the efficiency of our approach.
Section 4 presents comparisons of our approach to other methods and simulations based on a high-dimensional PDE (spatiotemporal) model with given autocollaborations among the initial conditions, which are considered in
Section 5 to compare our approach to the adjoint-based methods. We conclude this work in
Section 6.
2. Preliminaries
For an integer , let be a random vector of continuous and nonindependent variables having F as the joint cumulative distribution function (CDF) (i.e., ). For any , we use or for the marginal CDF of and for its inverse. Also, we use and . The equality (in distribution) means that X and Z have the same CDF.
As the sample values of are dependent, here we use for the formal partial derivative of f with respect to , that is, the partial derivative obtained by considering other inputs as constant or independent of . Thus, stands for the formal or classical gradient of f.
Given an open set
, consider a weak partial differentiable function
[
41,
42]. Given
, denote
;
,
, and consider the Hölder space of
-smooth functions given by
with
and
. We use
for the Euclidean norm,
for the
norm,
for the expectation, and
for the variance.
For the stochastic evaluations of functions, consider
,
with
,
, and denote with
the
d-dimensional random vectors of independent variables satisfying the following:
,
The random vectors of the independent variables that are symmetrically distributed about zero are instances of
, including the standard Gaussian random vector and the symmetric uniform distributions about zero.
Also, denote ; and . The real s are used for controlling the order of approximations and the order of derivatives (i.e., ) that we are interested in. Finally, s are used to define a neighborhood of a sample point of (i.e., ). Thus, using and keeping in mind the variance of , we assume that ,
Assumption 1. or equivalently for bounded .
3. Main Results
This section aims at providing new expressions of the gradient of a function with nonindependent variables and the associated order of approximations. We are also going to derive the estimators of such a gradient, including the optimal and parametric rates of convergence. Recall that the input variables are said to be nonindependent whenever there exist at least two variables such that the joint CDF .
3.1. Stochastic Expressions of the Gradients of Functions with Dependent Variables
Using the fact that
, with
, we are able to model
as follows [
8,
9,
10,
11,
12,
14,
43]:
where
;
; and
are independent. Moreover, we have
, and it is worth noting that the function
is invertible with respect to
for continuous variables, that is,
Note that the formal Jacobian matrix of
,
is the identity matrix. As
is a sample value of
, the dependent Jacobean of
g based on the above dependency function is clearly not the identity matrix due to the fact that such a matrix accounts for the dependencies among the elements of
. The dependent partial derivatives of
with respect to
are then given by [
9,
15]
and the dependent Jacobian matrix becomes (see [
15] for more details)
Moreover, the gradient of
f with nonindependent variables is given by [
15]
with
being the tensor metric and
being its generalized inverse. Based on the above framework, Theorem 1 provides the stochastic expression of
. In what follows, denote
.
Theorem 1. Assume that , with , Assumption 1 holds and that the s are distinct. Then, there exists and reals coefficients such that Using the Kronecker symbol
, the setting
, or the constraints
lead to the order of approximation
, while the constraints
allow for increasing that order up to
. For distinct
s, the above constraints lead to the existence of the constants
. Indeed, some constraints rely on the Vandermonde matrix of the form
which is invertible for distinct values of the
s (i.e.,
), because the determinant
.
Remark 1. For an even integer L, the following nodes may be considered: . When L is odd, one may add 0 to the above set. Of course, there are other possibilities, provided that .
Beyond the strong assumption made on the functions in Theorem 1, and knowing that increasing
L will require more evaluations of
f at random points, we are going to derive the upper bounds of the biases of our appropriations under different structural assumptions on the deterministic functions
f and
, such as
, with
. To that end, denote
as a
d-dimensional random vector of independent variables that are centered about zero and standardized (i.e.,
,
), and let
be the set of such random vectors. Define
with
the matrix obtained by putting the entries of
in the absolute value.
When , only or can be considered for any function that belongs to . To be able to derive the parametric rates of convergence, Corollary 1 starts providing the upper bounds of the bias when .
Corollary 1. Consider ; ; and . If and Assumption 1 hold, then there exists such that For a particular choice of , we obtain the results below.
Corollary 2. Consider ; ; . If , where , , , and Assumption 1 hold, then Proof. Since
, we have
, and the results hold using the following upper bounds:
and
obtained in
Appendix B. □
It is worth noting that choosing
and
leads to the dimension-free upper bound of the bias, that is,
because
is a function of
d in general.
For the sequel of generality, Corollary 3 provides the bias of our approximations for highly smooth functions. To that end, define
Corollary 3. For an odd integer , consider . If and Assumption 1 hold, then there exists such thatMoreover, if , with and , then Proof. The proofs are similar to those of Corollary 1 (see
Appendix B). □
In view of the results provided in Corollary 3, finding the s and Cs that minimize the quantity might be helpful for improving the above upper bounds.
3.2. Links to Other Works for Independent Input Variables
Recall that for independent input variables, the matrix
comes down to the identity matrix, and
. Thus, Equation (
7) becomes
when
. Taking
leads to the upper bound
.
Other results about the upper bounds of the bias of the (formal) gradient approximations have been provided in [
19,
20] (and the references therein) under the same assumptions made on
f and the evaluations of
f. Such results rely on a random vector
that is uniformly distributed on the unit ball and a kernel
K. Under such a framework, the upper bound derived in [
19,
20] is
where
is independent of
. Therefore, our results improve the upper bound obtained in [
19,
20] when
, for instance.
3.3. Computation of the Gradients of Functions with Dependent Variables
Consider a sample of
given by
. Using Equation (
3), the estimator of
is derived as follows:
To assess the quality of such an estimator, it is common to use the mean squared error (MSE), including the rates of convergence. The MSEs are often used in statistics for determining the optimal value of
as well. Theorem 2 and Corollary 4 provide such quantities of interest. To that end, define
Theorem 2. Consider ; ; and . If and Assumption 1 hold, then Moreover, if , with , and , then Using a uniform bandwidth, that is,
, with
, the upper bounds of MSEs provided in Theorem 2 have simple expressions. Indeed, the upper bounds in Equations (
8) and (
9) become, respectively,
It comes out that the second terms of the above upper bounds do not depend on the bandwidth
h. This key observation leads to the derivation of the optimal and parametric rates of convergence of the proposed estimator.
Corollary 4. Under the assumptions made in Theorem 2, if and , with , then we have Proof. The proof is straightforward, since and when . □
It is worth noting that the upper bound of the squared bias obtained in Corollary 4 does not depend on the dimensionality, thanks to the choice of . But, the derived rate of convergence depends on , thus meaning that our estimator suffers from the curse of dimensionality. In higher dimensions, an attempt to improve our results consists of controlling the upper bound of the second-order moment of the estimator through .
Remark 2. For highly smooth functions (i.e., , with ) and under the assumptions made in Corollary 3, we can check that (see Appendix C) 4. Computations of the Formal Gradient of Rosenbrock’s Function
For comparing our approach to (i) the finite differences method (FDM) using the R package numDeriv [
44], with
, and (ii) the Monte Carlo (MC) approach provided in [
17], with
, let us consider the Rosenbrock function given as follows:
,
The gradient of that function at
is
(see [
17]). To assess the numerical accuracy of each approach, the following measure is considered:
where
is the estimated value of the gradient.
Table 1 reports the values of
for the three approaches. To obtain the results using our approach, we have used
, with
N as the sample size and
, with
. Also, the Sobol sequence has been used for generating the values of the
s, and the Gram–Schmidt algorithm is applied to obtain (perfect) orthogonal vectors for a given
N.
Based on
Table 1, our approach provides efficient results compared to other methods. Since the FDM is not possible when
, it comes out that our approach is quite flexible thanks to
L and the fact that the gradient can be computed for every value of
N. Increasing
N improved our results, as expected.
5. Application to a Heat PDE Model with Stochastic Initial Conditions
5.1. Heat Diffusion Model and Its Formal Gradient
Consider a time-dependent model
defined by the one-dimensional (1-D) diffusion PDE with stochastic initial conditions, that is,
where
represents the diffusion coefficient. It is common to consider
as the quantity of interest (QoI). The spatial discretisation consists in subdividing the spatial domain
in
d equally sized cells, which leads to
d initial conditions or inputs given by
with
. Given zero-mean random variables
, assume that
, where
represents the inverse precision about our knowledge on the initial conditions. For the dynamic aspect, a time step of
is considered starting from 0 up to
.
Given a direction
and the Gâteaux derivative
, the tangent linear model is derived as follows:
and we can check that the adjoint model (AM) (i.e.,
) is given by
The formal gradient of
with respect to the inputs
is
. Remark that the above gradient relies on
, and only one evaluation of such a function is needed.
5.2. Spatial Autocorrelations of Initial Conditions and the Tensor Metric
Recall that the above gradient is based on the assumption of independent input variables, thus suggesting that the initial conditions within different cells are uncorrelated. To account for the spatial autocorrelations between different cells, assume that the
d input variables follow the Gaussian process with the following autocorrelation function:
where
if
and is zero otherwise. Such spatial autocorrelations lead to the correlation matrix of the form
Using the same standard deviation
leads to the following covariance matrix
, and
, with
, and
being the centers of the cells. The associated dependency model is given below.
Consider the diagonal matrix
and the Gaussian random vector
. Denote with
the matrix obtained by moving the
row and column of
to the the first row and column;
is the Cholesky factor of
, and
. We can see that
, and the dependency model is given by [
10]
Based on Equation (
10), we have
. Thus, we can deduce that
, with
being the
column of
, and the dependent Jacobian becomes
, since
, and
. The tensor metric is given by
.
5.3. Comparisons between Exact Gradient and Estimated Gradients
For running the above PDE-based model using the R package deSolve [
45], we are given
and
. The exact and formal gradient associated with the mean values of the initial conditions is obtained by running the corresponding adjoint model. For estimating the gradient using the proposed estimators, we consider
and
. We also use
and
. The Sobol sequence is used for generating the random values of the
s, and the Gram–Schmidt algorithm is applied to obtain perfect orthogonal vectors for a given
N.
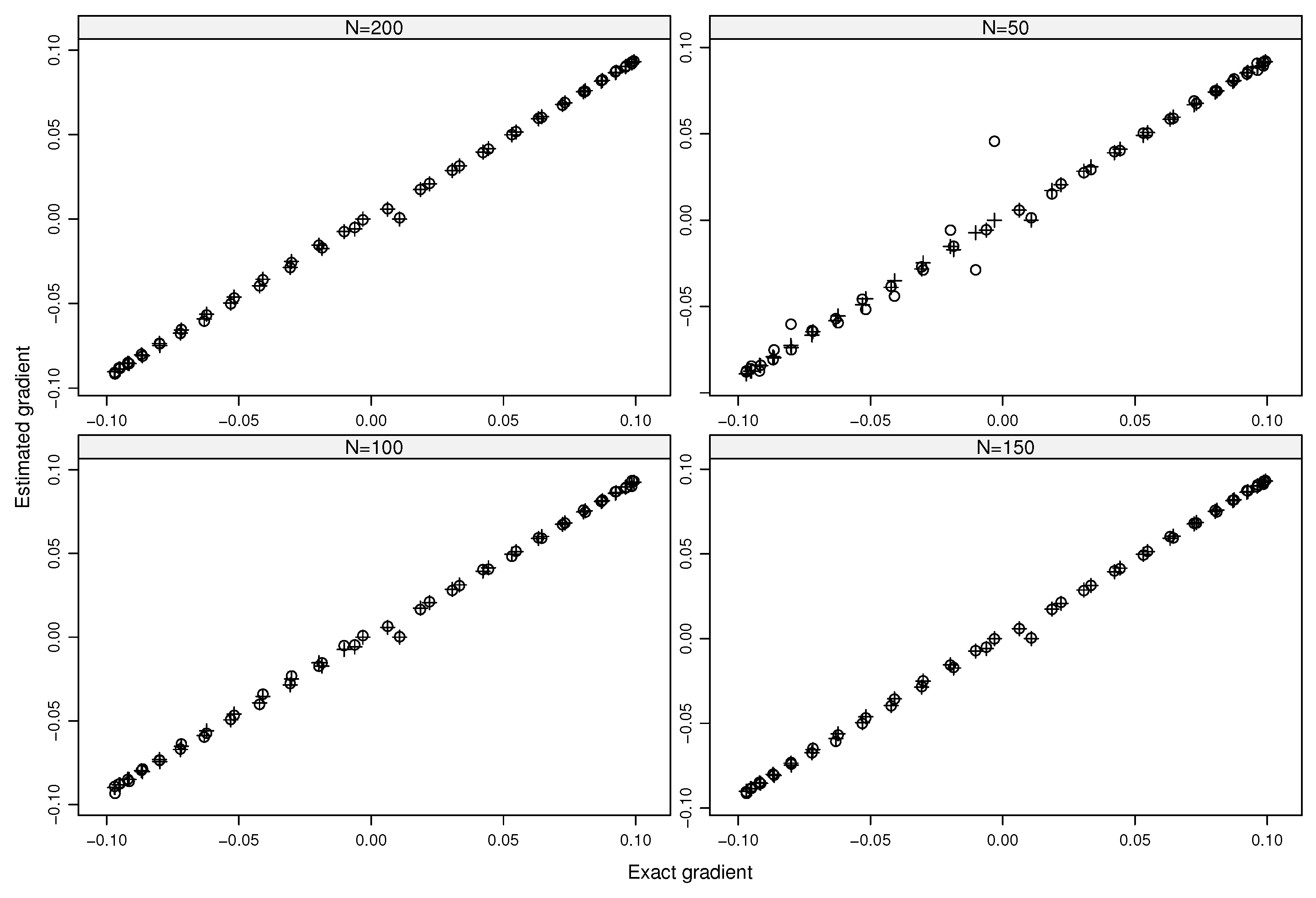
Figure 1 shows the comparisons between the estimated and the exact values of the formal gradient
(i.e.,
) for
. Likewise,
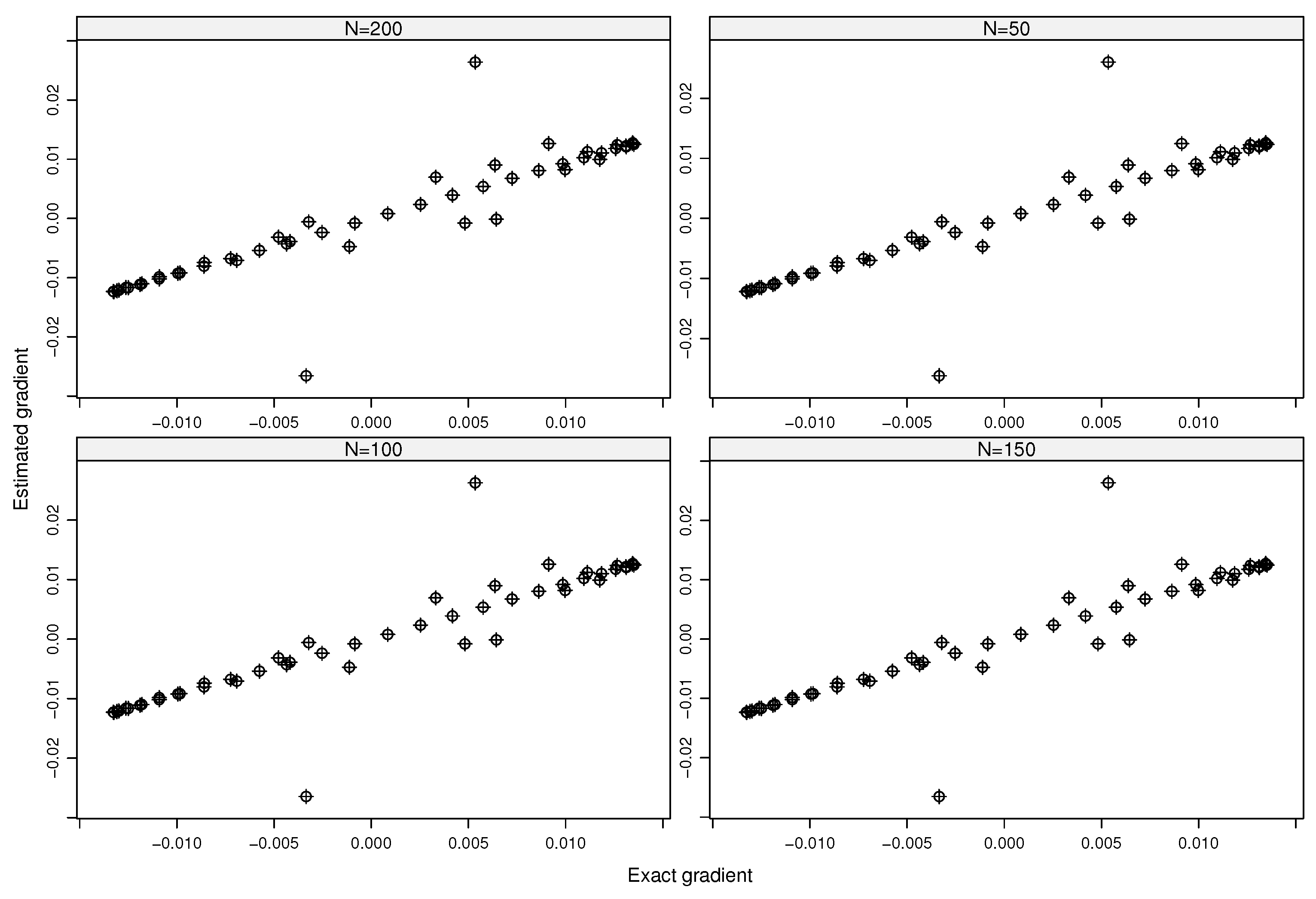
Figure 2 and
Figure 3 depict the dependent gradient
and its estimation. The estimates of both gradients are in line with the exact values using only
(respectively,
) model evaluations when
and
(respectively,
and
or
and
). Increasing the values of
L and
N gives the same quasiperfect results for both the formal and dependent gradients (see
Figure 3).
6. Conclusions
In this paper, we have proposed new, simple, and generic approximations of the gradients of functions with nonindependent input variables by means of independent, central, and symmetric variables and a set of constraints. It comes out that the biases of our approximations for a wide class of functions, such as 2-smooth functions, do not suffer from the curse of dimensionality by properly choosing the set of independent, central, and symmetric variables. For functions including only independent input variables, a theoretical comparison has shown that the upper bounds of the bias of the formal gradient derived in this paper outperformed the best known results.
For computing the dependent gradient of the function of interest, we have provided estimators of such a gradient by making use of evaluations of that function at randomized points. Such estimators reach the optimal (mean squared error) rates of convergence (i.e., ) for a wide class of functions. Numerical comparisons using a test case and simulations based on a PDE model with given autocollaborations among the initial conditions have shown the efficiency of our approach, even when constraints were used. Our approach is therefore flexible, thanks to L and the fact that the gradient can be computed for every value of the sample size N in general.
While the proposed estimators reach the parametric rate of convergence, note that the second-order moments of such estimators depend on . An attempt to reach a dimension-free rate of convergence requires working in rather than when . In the future, it is worth investigating the derivation of the optimal rates of convergence that are dimension-free or (at least) are linear with respect to d by considering constraints. Also, combining such a promising approach with a transformation of the original space might be helpful for reducing the number of model evaluations in higher dimensions.




{kind=link}
{kind=link}
{kind=link}