1. Introduction
As a fundamental nonlinear convection-diffusion equation, Burgers’ equation, named after Johannes M. Burgers [
1], takes its form by simplifying the Navier–Stokes (N-S) equations while retaining the convection and viscosity terms. This model provides valuable insights into the behavior of complex waves occurring in turbulence, gas dynamics, nonlinear acoustics, traffic flow, etc. When the convection term tends to zero, Burgers’ equation becomes a quasi-linear hyperbolic conservation law, in which shock waves can develop in a limited time even using smooth enough initial conditions. Owing to its simplicity in form and ability to generate strong discontinuities, plenty of studies have been conducted to find out its approximate and analytical solutions under various initial and boundary conditions.
In contrast, the quasi-linear convection term in Burgers’ equation brings difficulty to numerical solution approaches. When the viscosity term diminishes as the Reynolds number increases, Burgers’ equation becomes convective dominant and results in steep wave fronts. In this case, numerical solutions often exhibit spurious oscillations around the discontinuities. Much effort has been dedicated to designing accurate and stable computing schemes to solve Burger’s equation for large Reynolds numbers. According to the manner for spacial discretization, these schemes can be roughly categorized into mesh-based approaches [
2,
3,
4,
5,
6,
7,
8] and mesh-free methods [
9,
10]. However, mesh-based approaches, such as finite difference/volume/element methods, seriously rely on deliberated meshes to discretize problem domain onto grid lines or elements to acquire accurate spacial approximation.
Compared with mesh-based approaches, mesh-free methods offer flexibility and advantages in problems involving complex geometries, moving boundaries, discontinuities and sharp gradient issues. The core idea of mesh-free methods is to use scattered nodes or points to discrete the domain of interest in space rather than predefined meshes. In this way, the solution to partial differential equations can be approximated by interpolation or functionals at these nodes. In recent years, several mesh-free approaches have emerged and are increasingly applied to solve Burgers’ equation, such as the element-free Galerkin method [
11,
12], reproducing kernel particle method [
13,
14], and finite point method [
15].
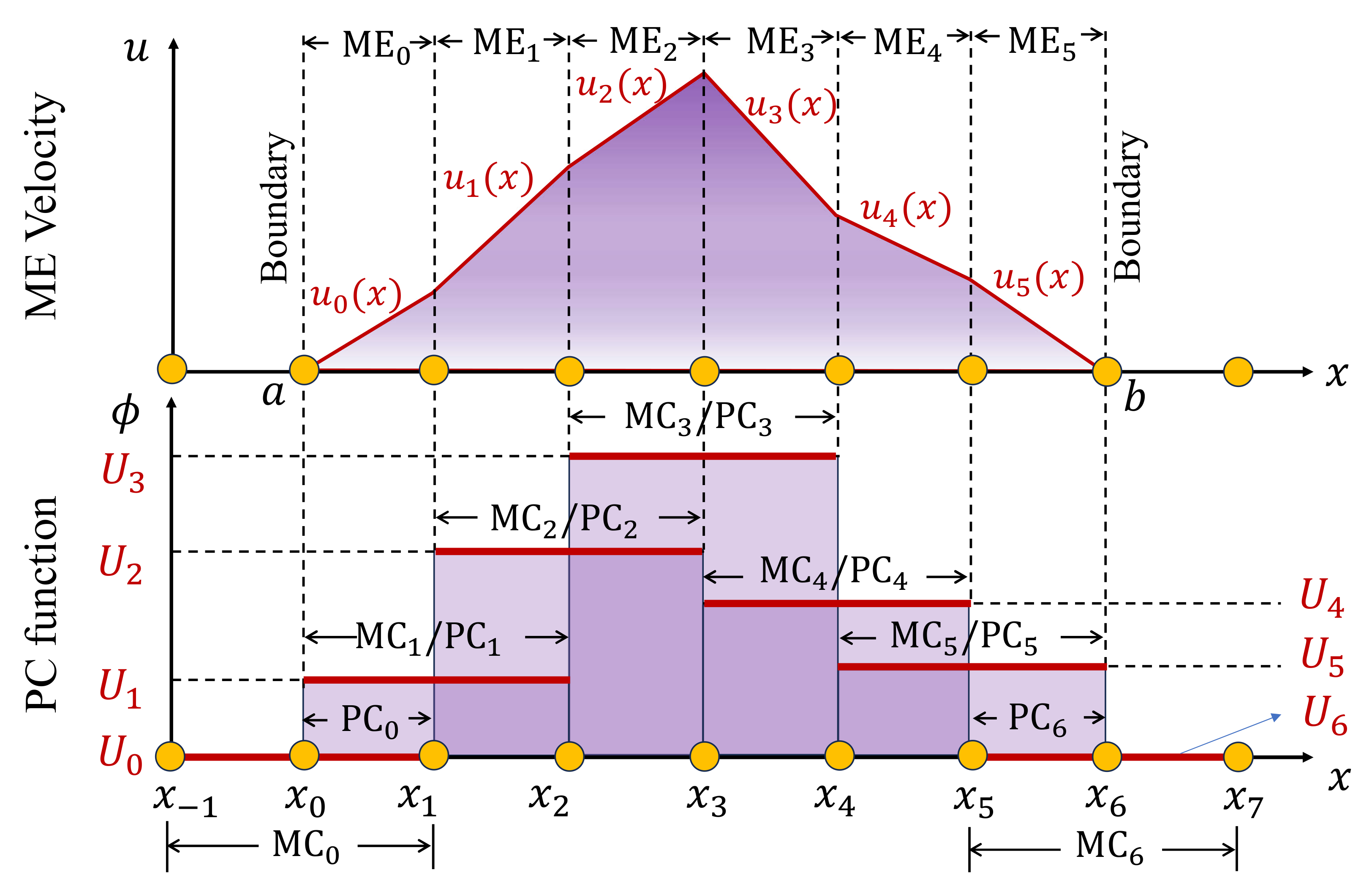
Numerical manifold method (NMM) [
16] is a widely used computational approach for modeling large deformations [
17], contacts [
18] and fracture problems [
19] in geotechnical engineering. The fundamental concept of the NMM is its dual-cover system for spacial discretization. Such a system is comprised of mathematical covers (MCs) and physical covers (PCs): MCs are a series of individual overlapping regions that occupy the whole material field, and PCs are subsequently generated by trimming MCs with material boundaries. The intersections of PCs form manifold elements (MEs), which connect PCs to reconstruct the entire problem domain. In the NMM, the approximation and integral are implemented on the PC and ME, respectively. The global approximation throughout the material domain is the assemblage of local cover functions by using the technique analogous to the partition-of-unity (PU) strategy. In this way, cover functions and weight functions can be chosen independently, and discontinuous global approximation is admissible. Such spacial discretization brings specific benefits for modeling problems involving complex geometry shapes and boundary conditions, such as moving boundaries and internal discontinuities.
Recently, the NMM has been applied to simulate more general problems, such as heat conduction Equations [
20,
21,
22], incompressible N-S Equations [
23] and seepage flows [
24,
25]. In those studies, the NMM shows substantial flexibility owing to its unique dual-cover system. Different from mesh-based approaches, the NMM can generate MCs through FE-type meshes, unstructured meshes and even the mesh with irregular shapes. Since MC meshes are not necessary to exactly coincide with the problem boundary, the pre-processing of the NMM is far simpler than mesh-based approaches. In this way, a lot of time can be saved. The solution obtained by the NMM can be
functions and even contain discontinuous. Due to a larger admissible solution space, this method possesses more efficiency and stability. Compared with other mesh-free methods, the NMM uses polynomial cover approximation and weights but not complex deliberated functions. In such a manner, the integrals over MEs can be exactly calculated instead of using Gaussian quadrature.
In view of the aforementioned advantages of the NMM, we present a new NMM scheme, referred to as the explicit numerical manifold characteristic Galerkin method (ENMCGM), to numerically solve Burgers’ equation in the present work.
Regarding temporal discretization, we use the Crank–Nicolson method (CNM) to transfer the equation into a finite difference form along the characteristic firstly and then adopt Taylor expansion and convert it into an explicit semi-discretization scheme. No extra parameter is introduced to ensure computation convergence.
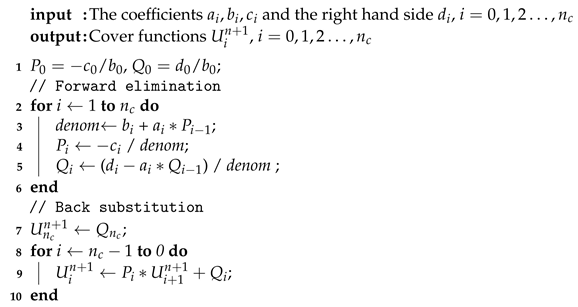
Regarding spacial discretization, we obtain the weak form of the semi-discretization of Burgers’ equation by using the standard Galerkin method first and then integrate the formulation by parts and obtain the presented scheme. Furthermore, we adopt the Thomas algorithm to solve the resulting tridiagonal linear equations, and iterative formulations are derived in detail. As an explicit method, the ENMCGM is conditionally stable. We give an estimation for the time step size of our method based on the CFL condition.
Plenty of numerical examples are conducted to validate the proposed method for varied initial conditions and boundary conditions as well as varying Reynolds numbers. We evaluated the results by contrasting them with analytical solutions and findings obtained from alternative methods. Comparisons demonstrate that the proposed ENMCGM is accurate and stable, even for large Reynolds numbers. The outline of this paper is arranged as follows.
Section 2 presents an introduction to the Burgers’ equation. In
Section 3, the temporal discretization is carried out.
Section 4 provides the dual-cover-based approximation for the velocity.
Section 5 presents the spacial discretization of Burgers’ equation and the integrated computing scheme of the ENMCGM. In
Section 6, numerical examples are conducted to evaluate the presented method, and the conclusion of this paper comes in
Section 7.
6. Numerical Examples
In this section, the ENMCGM conducts six representative numerical examples to rigorously evaluate its accuracy, stability, and computing efficiency. This evaluation is performed by comparing the results with analytical solutions and available results obtained through alternative methods.
We utilize the relative error as a metric to evaluate the precision of the computed results at the point
, that is
where
and
represent the exact solution and the numerical result, respectively. We also use
-norm and
norm to measure the error for all PCs, i.e.,
where
N indicates the amount of MEs. Here,
and
denote the exact solution and numerical result at all MC mid-points, respectively, while
and
are the exact and numerical solution at the mid-point of
, respectively.
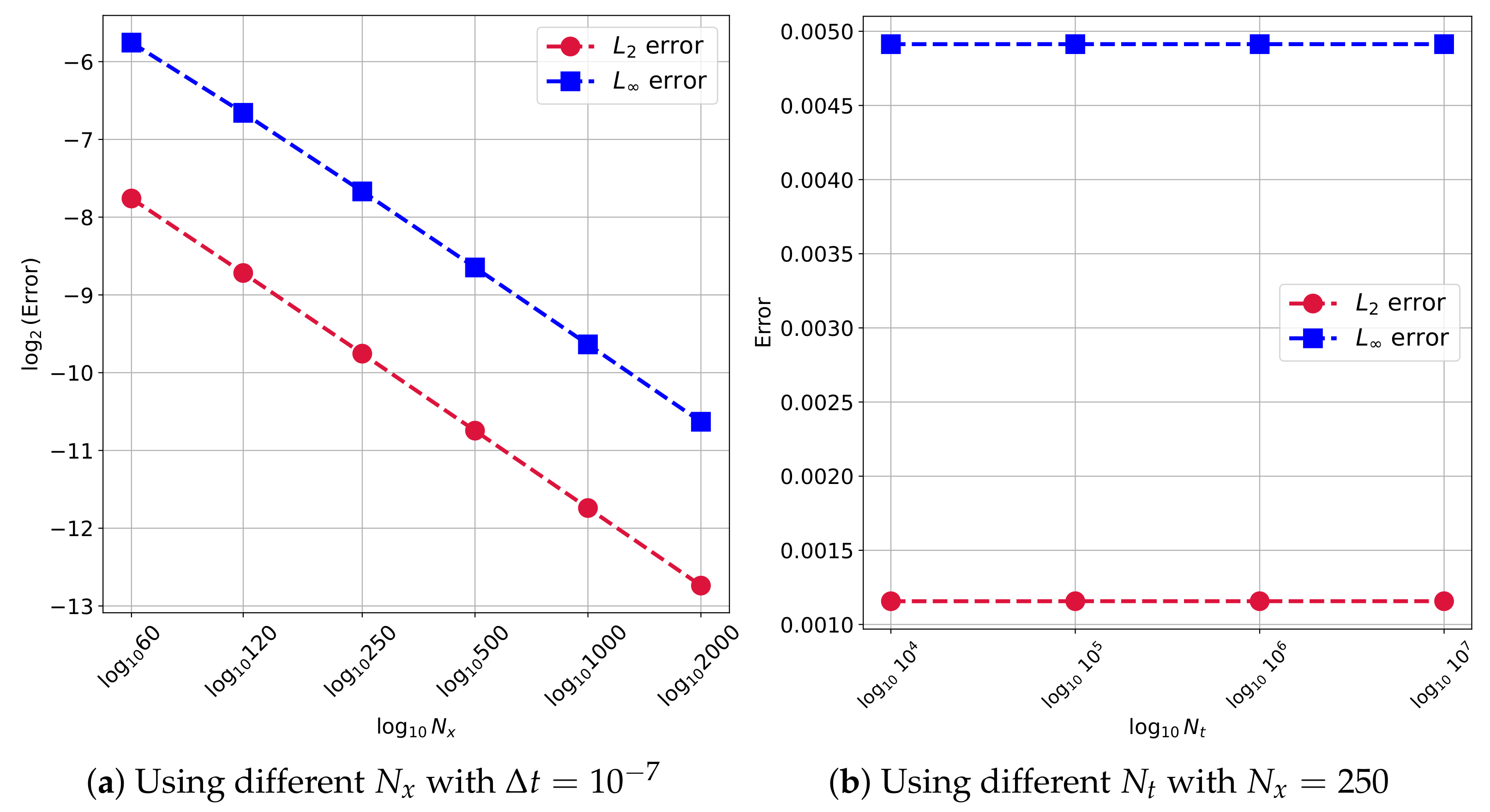
Example 1. Firstly, we examine the proposed method by considering the Burgers’ equation with the following sinusoidal IC and the homogeneous BC,Cole [29] has provided the subsequent analytical solutionwhere the coefficient and take the forms Firstly, we examine the convergence behavior of the ENMCGM for Example 1 at
using different mesh sizes and time step numbers.
Figure 3a plots the
and
errors as ME number
increases with fixed time step size
. It can be observed that both
and
error curves keep a constant rate on a logarithmic scale when the mesh spacing
h decreases from
to
.
Figure 3b illustrates the
and
errors as time step number
increases with
. We can find that the errors retain constant when time step size
increases from
to
for fixed mesh spacing
. In fact, since the ENMCGM is an explicit scheme,
is restricted by
h for the CFL condition as explained in
Section 5.3. Therefore, a smaller time step size has to be employed when using a finer MC mesh.
Based on the above convergence study, we adopt a uniform MC mesh on the domain with and in the following tests. We will focus on the numerical results for this example at different time T and Reynolds numbers.
In
Table 1, the results obtained from the ENMCGM for
are juxtaposed with both analytical solutions and the reference data presented by Zhang et al. [
11].
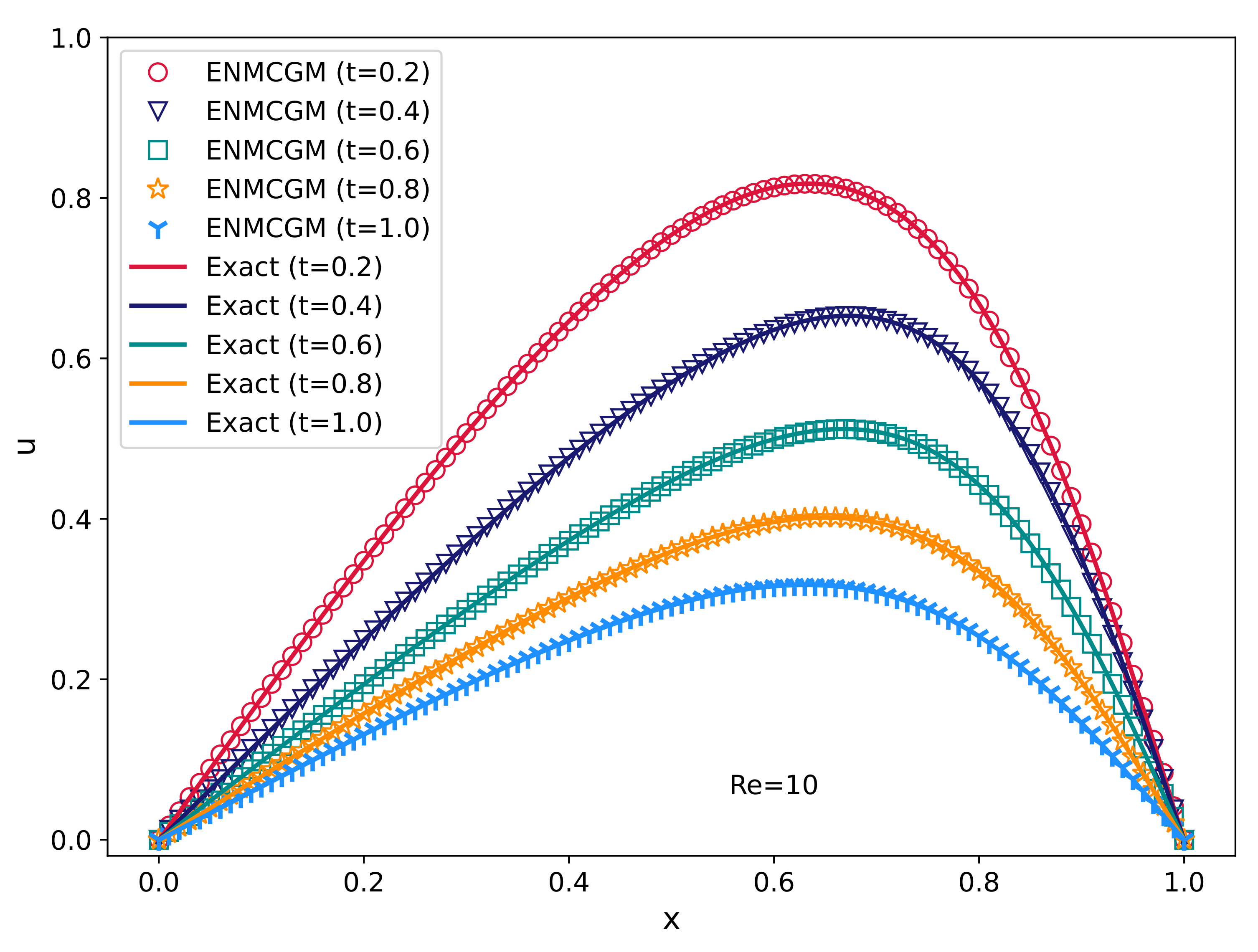
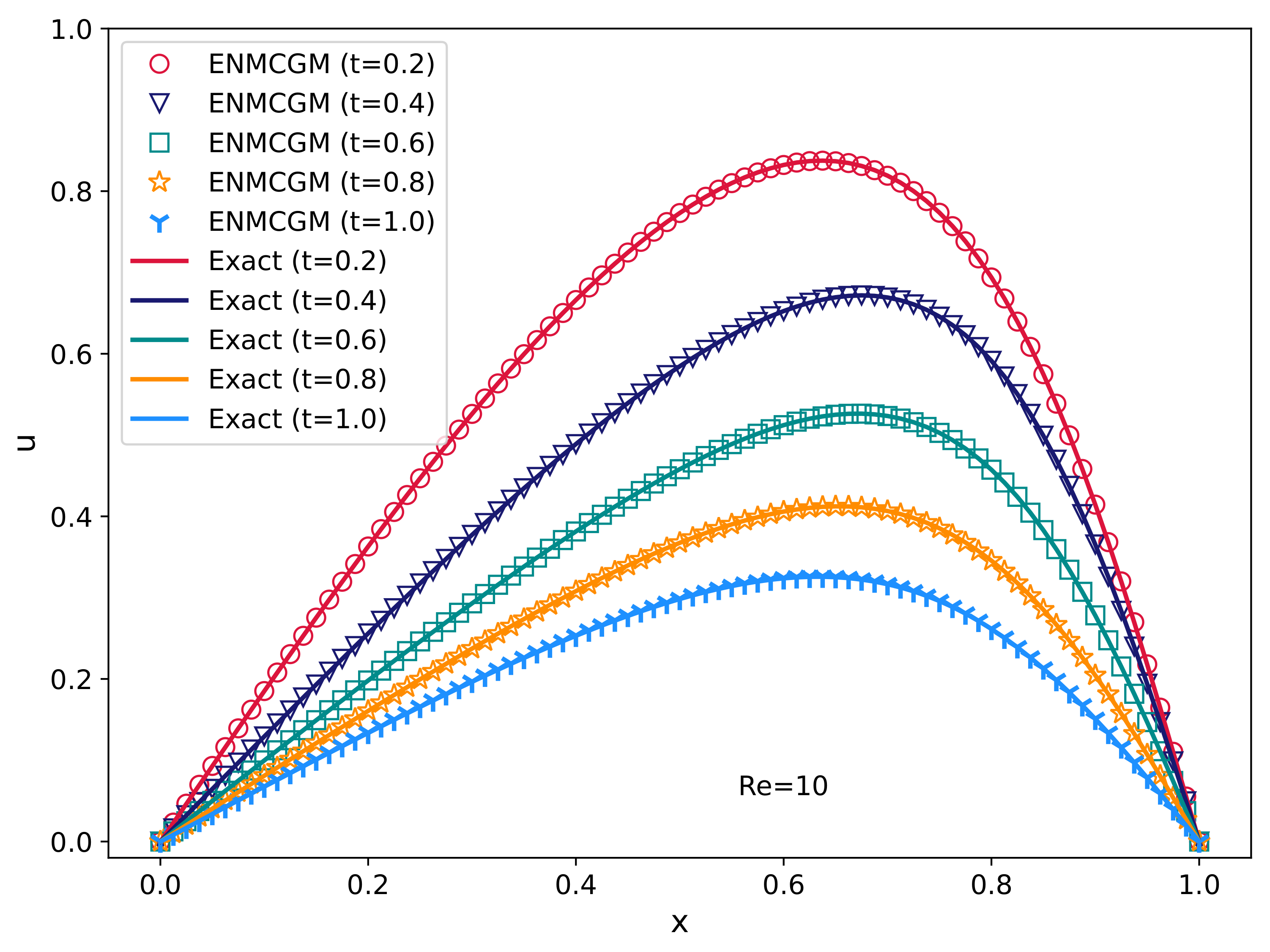
Figure 4 showcases our results alongside the analytical solutions for
at different temporal points. Upon examination, it can be observed that our results align with the analytical theory and the simulations by [
11]. It is worth noting that our method can exactly satisfy the boundary condition, while it is hard for the other meshless methods.
Table 2 compares the ENMCGM results with analytical solutions as well as the data given by [
11] for the case
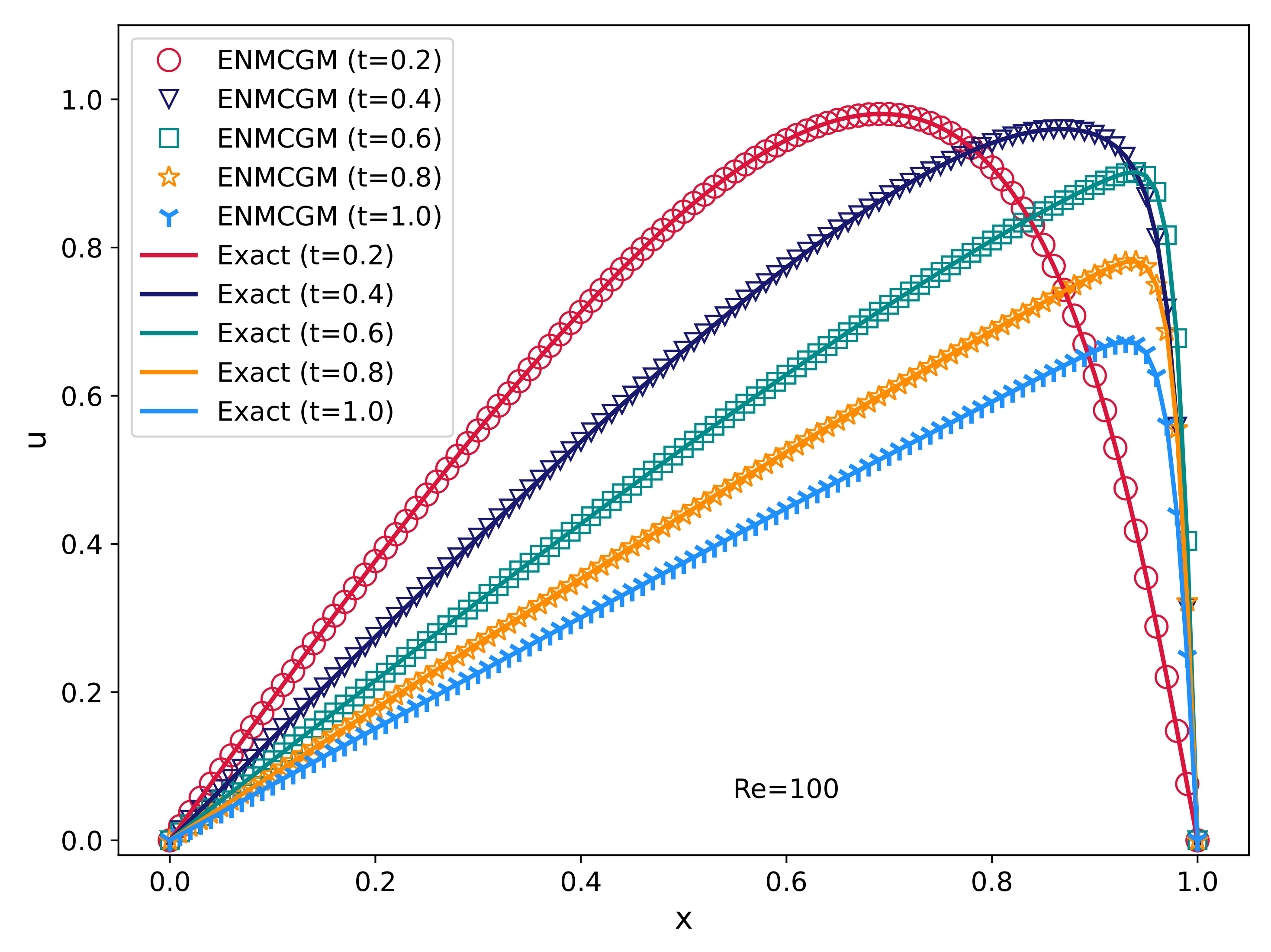
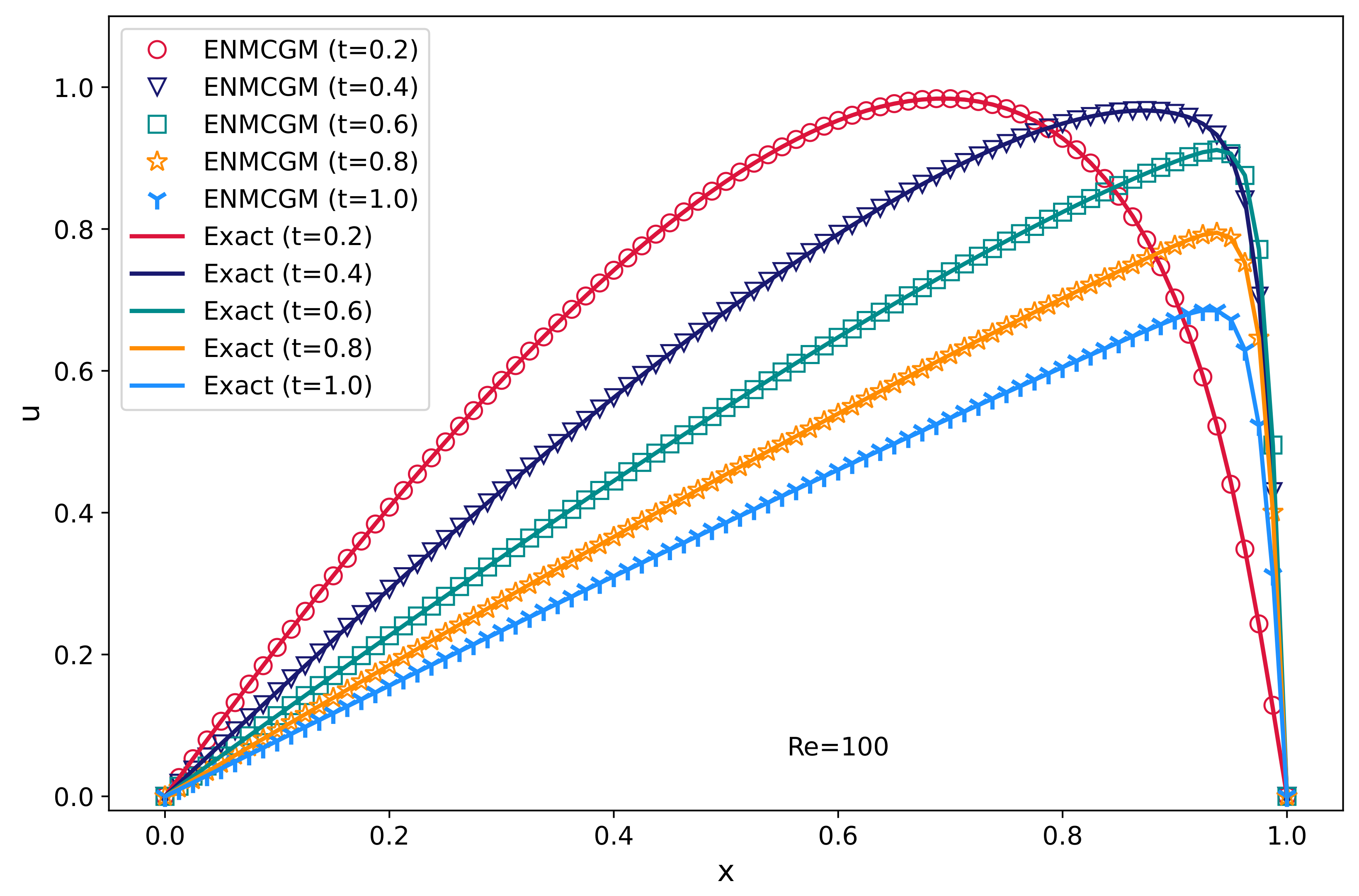
. In
Figure 5, the curves of ENMCGM results and the analytical solutions are demonstrated at
for
. Based on the comparison, we can see that our results for
are also identical to analytical solutions at different time instants. In this instance, the boundary conditions are also met accurately, and we choose to disregard the data presented in
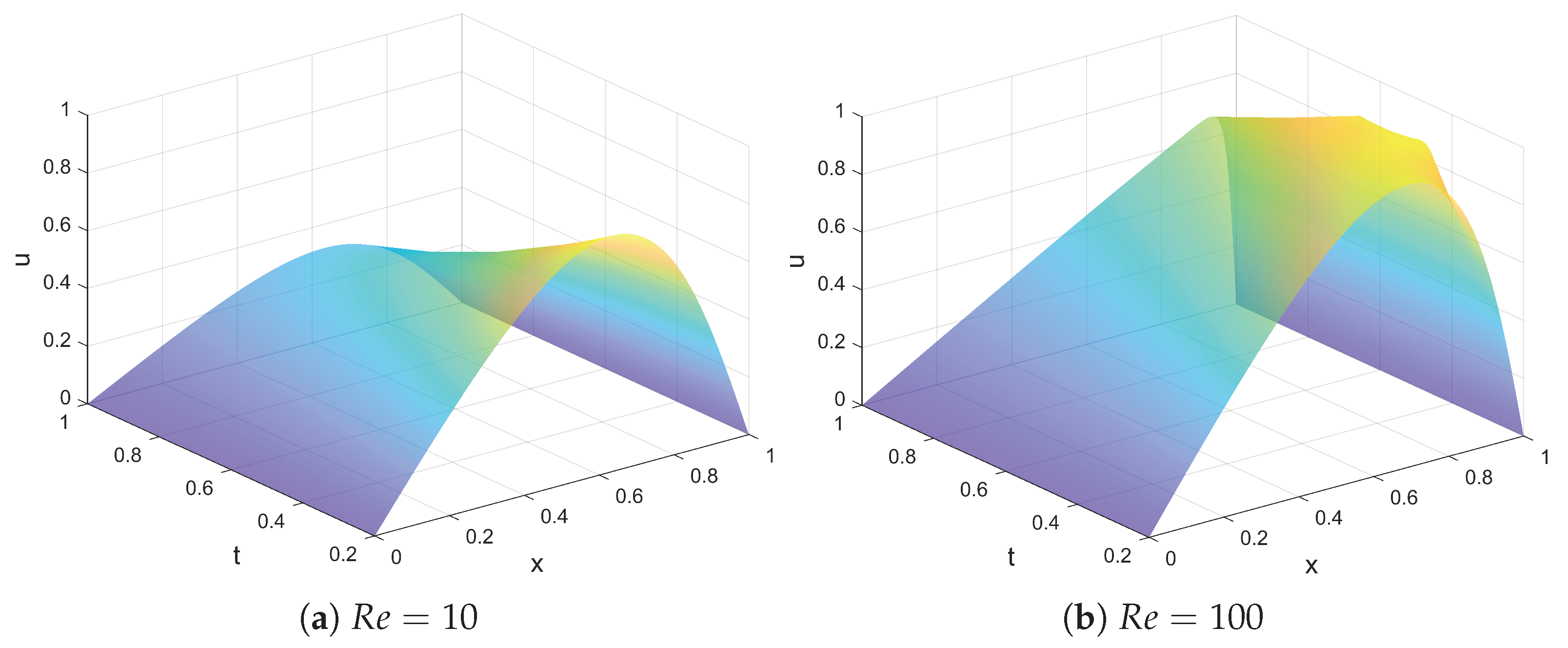
Table 2. The profiles of the velocity computed by our method at different times for
and
are illustrated in
Figure 6.
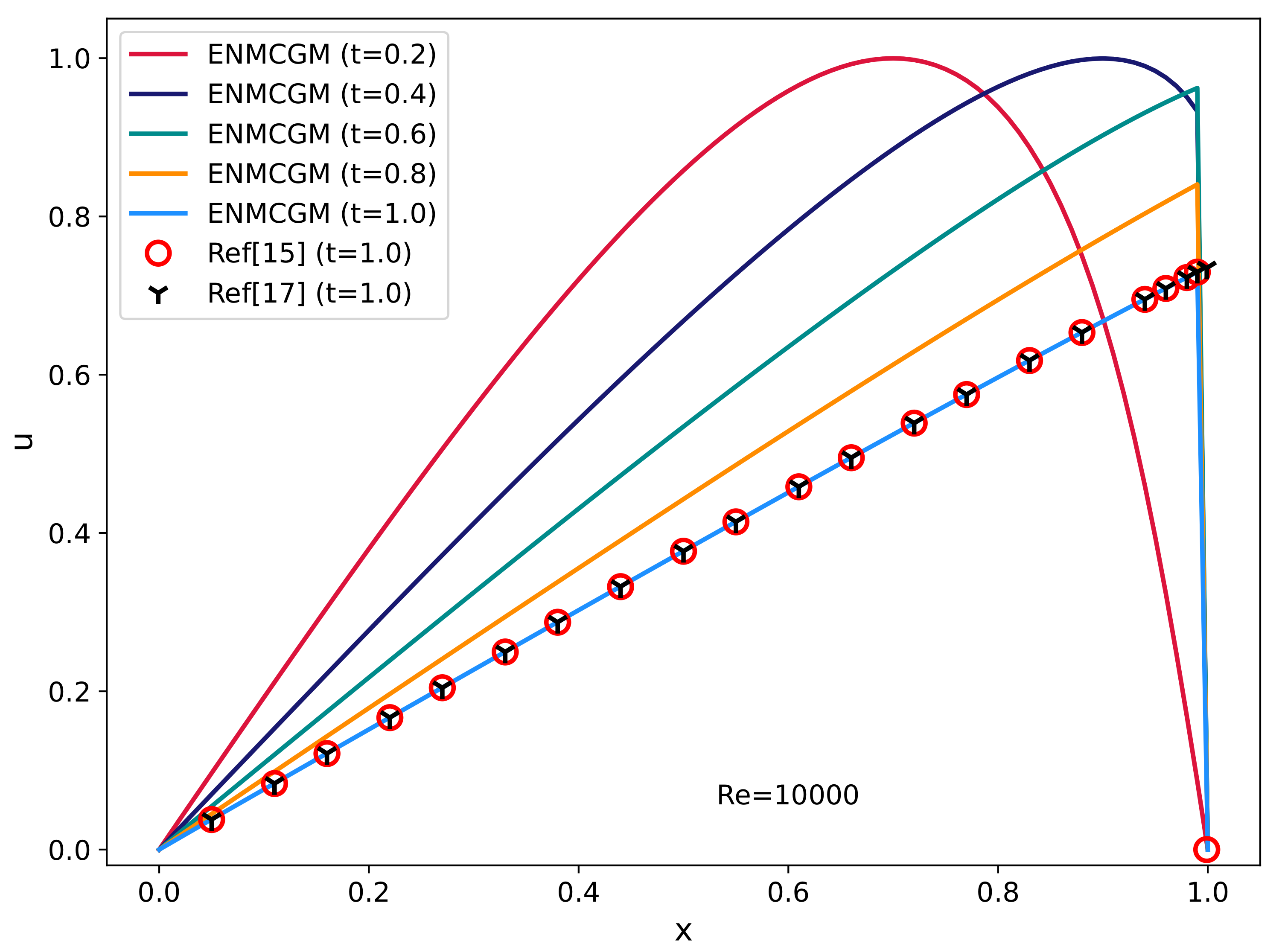
Since the analytical formulation Equation (
37) is not exact for large
values, the computing results of our method for the case when
= 10,000 are compared with the simulation results obtained in [
11,
13].
Table 3 gives the data at different positions
at
. For this test, we utilize identical MC mesh and time step configurations as those employed for
and
. Observably, our findings demonstrate strong concordance with those yielded by alternative meshless approaches. These outcomes are depicted in
Figure 7, where a shock wave emerges near
and no extraneous oscillations are evident.
Example 2. This example addresses the Burgers’ equation with the following IC and BC,The analytical solution for this problem shares the identical structure as Equation (37), albeit with distinct coefficients. and become the following integrals [30] in this problem We solve this problem using the ENMCGM for and , respectively. During the computation, we use the uniform MC mesh with , and fix the time step size .
Table 4 compares our results with analytical solutions and FDM results reported by Hassanien et al. [
30] for
. Upon examination, it becomes evident that our findings align with both the reference results and exact solutions. In
Figure 8, the curves of our results at
coincide with the analytical solutions for
.
Table 5 presents our results and analytical solutions at different times and positions for
. The good accuracy of our method can also be observed. As shown in
Figure 9, the curves of our results and the analytical solutions are identical at
for
. Beyond
, a sharp alteration in velocity is noticeable near
, devoid of any spurious oscillations. In
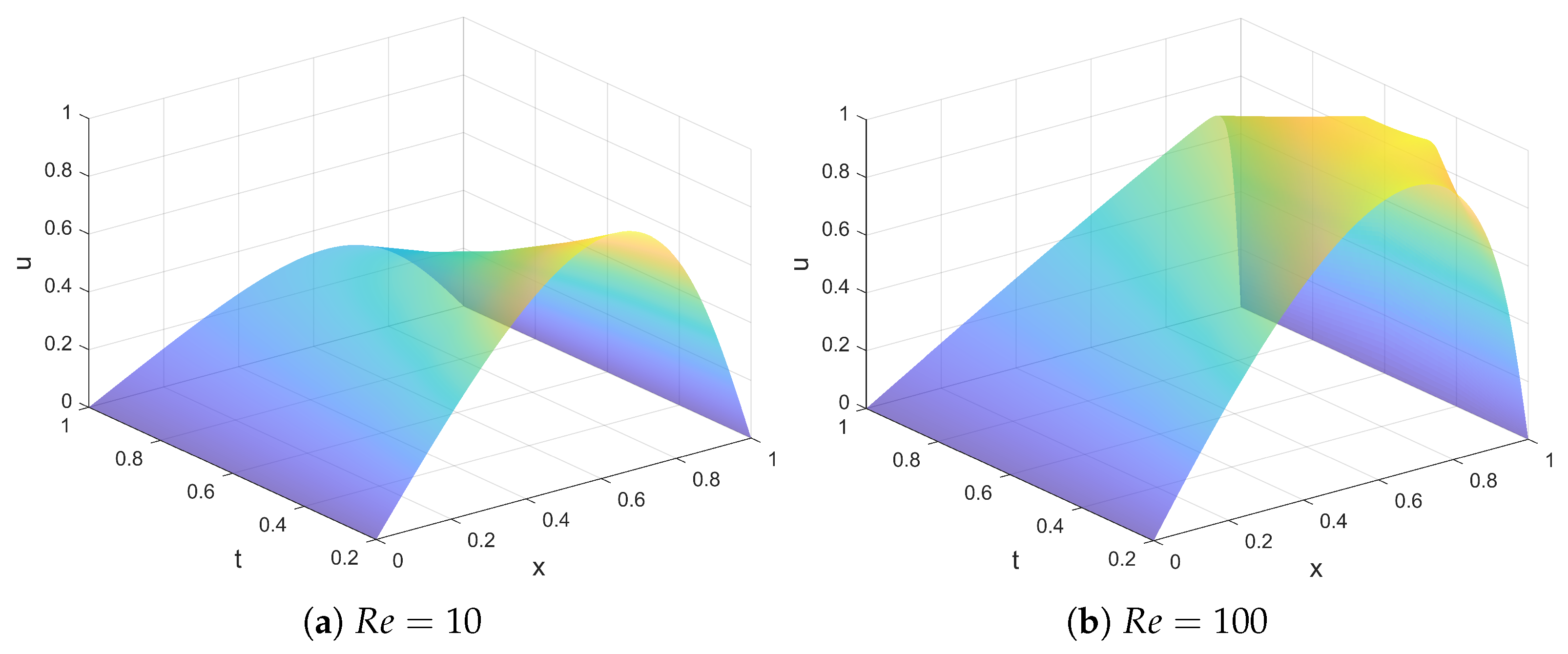
Figure 10, we plot the contours of the velocity changes computed by the ENMCGM for
and
. No spurious oscillation appears on the surfaces.
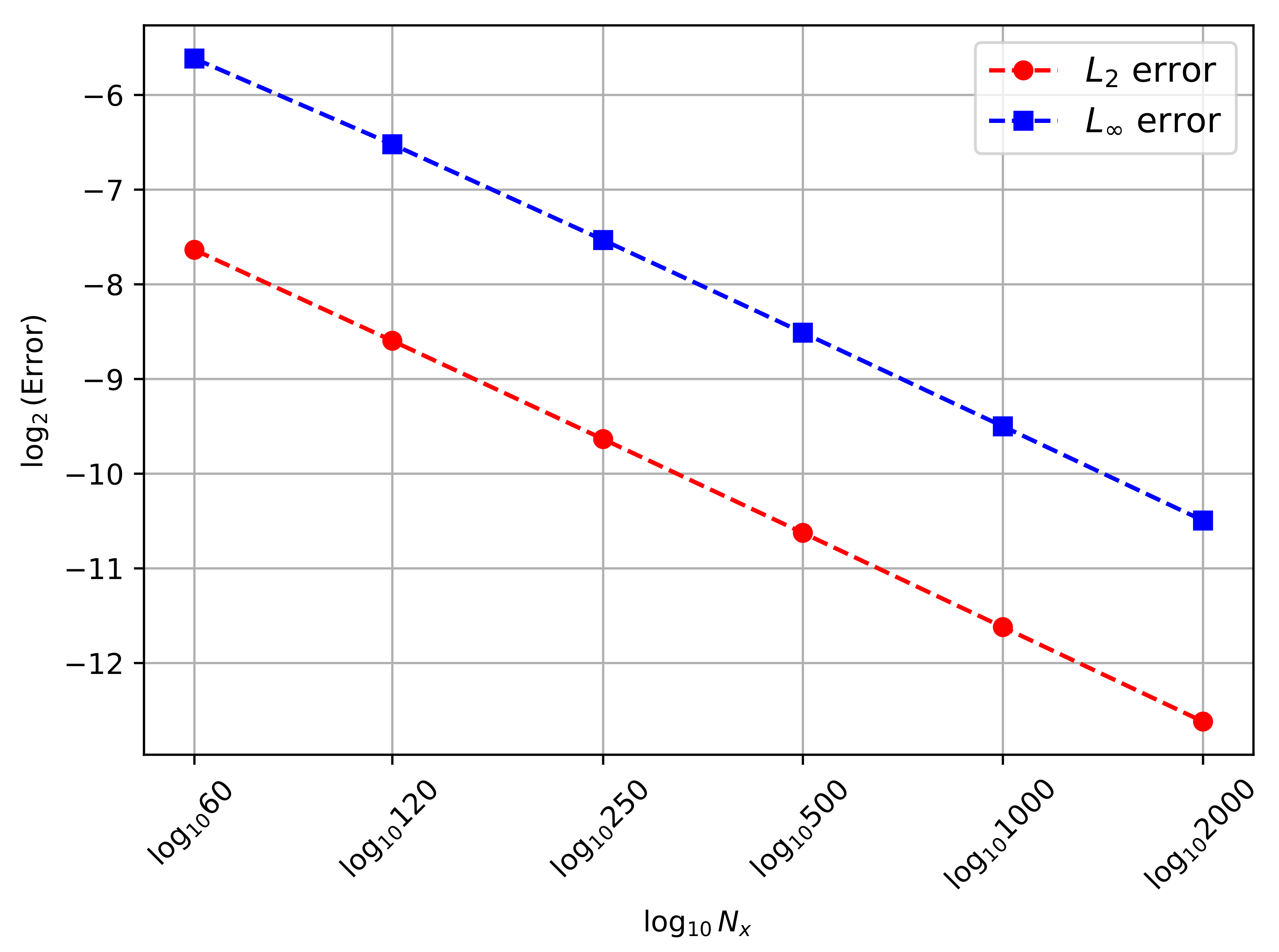
As shown in
Figure 11, the errors of the results obtained by the present scheme are measured on all PCs at
for different MC meshes. We compare the
and
for the computations using diversified ME numbers, i.e.,
. To eliminate the impact of the time step size, we consistently utilize a fixed time interval value of
. As
increases, good convergence behavior of the ENMCGM is revealed for this problem.
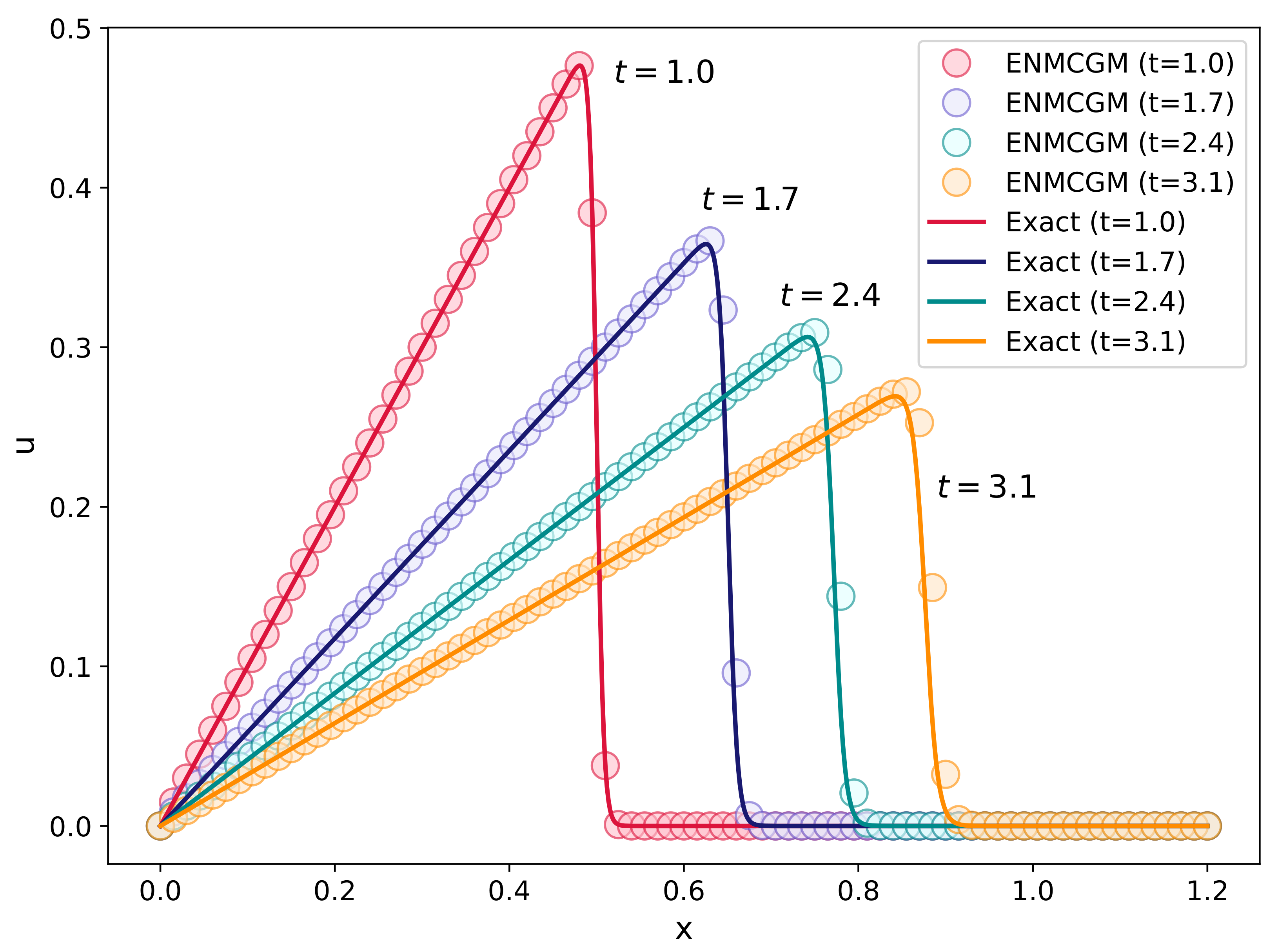
Example 3. Presently, we examine the specific solution [7] outlined below for the Burgers’ equation in Equation (1), that iswhere , . For this example, we use the result of Equation (41) at as the IC, that isand use the BC belowEquation (41) itself provides the analytical solution for this problem. We solve this problem by the ENMCGM for and , respectively. In the computation, the MC mesh containing MCs and the time step size are employed.
Figure 12 and
Figure 13 compared our results with the exact solution at
for the two
values. Furthermore, the errors between them in
and
norms are measured and given in
Table 6. And the errors obtained by the FEM [
7] are also listed in the table. These comparisons demonstrate a strong alignment between our results and the exact solutions. It has to be acknowledged that the errors are slightly greater than those reported in the literature [
7]. The reason lies in that we takes
as the domain, which is
as taken in the reference [
7].
Example 4. Now, we implement the ENMCGM to solve the Burgers’ equation Equation (1) which is equipped with the ICand the BCWe quote the analytical solution given by Wood [31] as follows, In this instance, we assess the efficacy of our method for
using different MC meshes at the time instant
. In
Table 7, our results at nine uniformly distributed points are compared with the exact solution on the MC meshes with
, respectively. The time step interval takes
for all tests. It can be found that the results on the five meshes are identical to the exact solutions. The finer mesh leads to more accurate velocity.
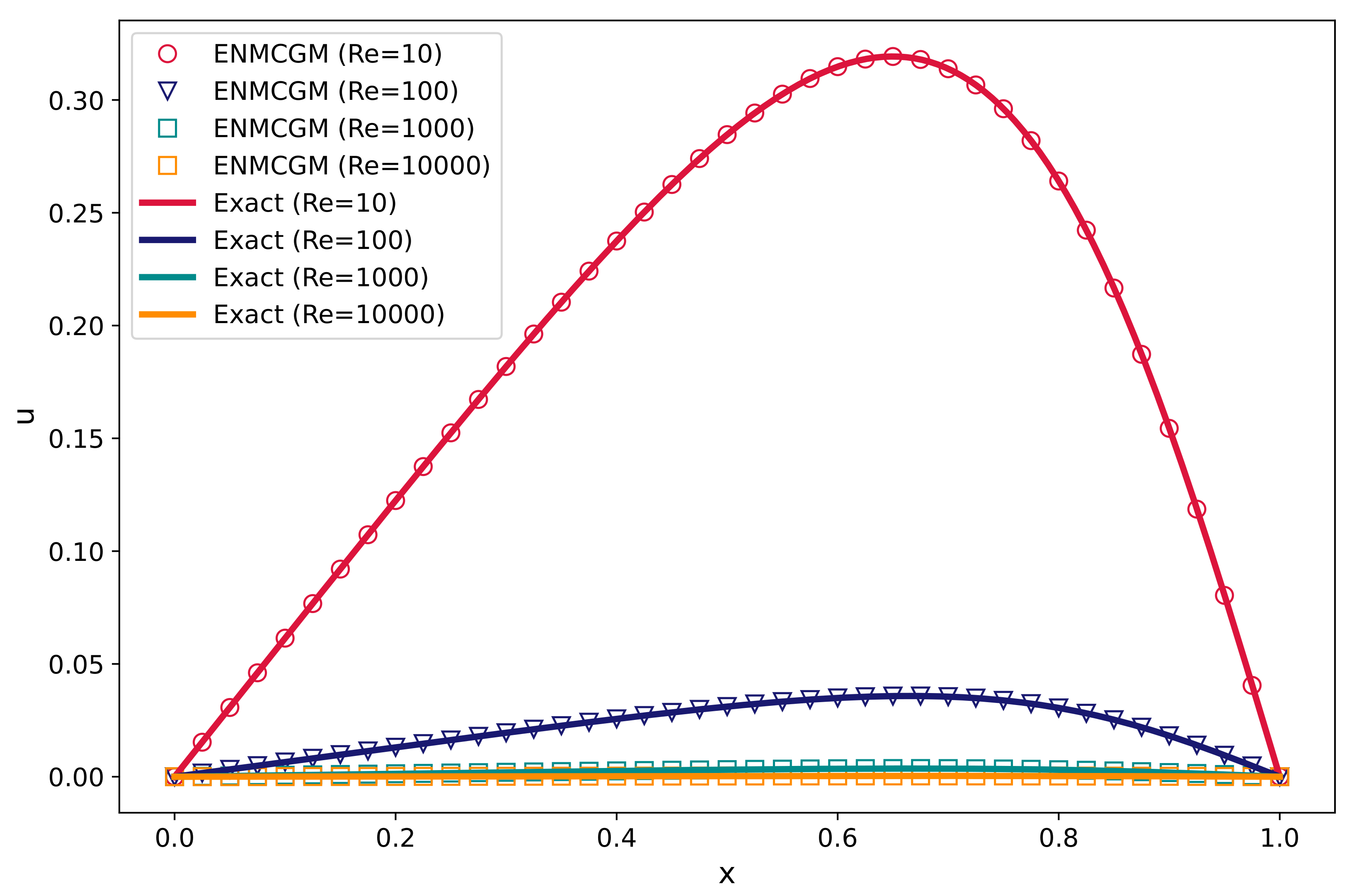
Next, we further examine the present method for different Reynolds numbers when adopting the same MC mesh and time step size. Here, MC quantity and time step interval are chosen to be
and
, respectively.
Table 8 presents a comparison between our results and the exact solution across varying spatial locations. It can be observed that for different
numbers, all computations obtain accurate results. Especially, the presented ENMCGM for the lower viscosity coefficient is more accurate than that for the larger one. This is because of the reason that our method is a first-order scheme in space, while Equation (
1) has a second-order derivative. Thus, there exists a slight difference between the ENMCGM result and the exact solution when
is small. However, the accuracy is still acceptable and it can be easily prompted by using finer MC mesh.
Figure 14 illustrates our results in contrast to the analytical solution for different
, 10,000 at
. The curves obtained by our method agree with the exact ones very well.
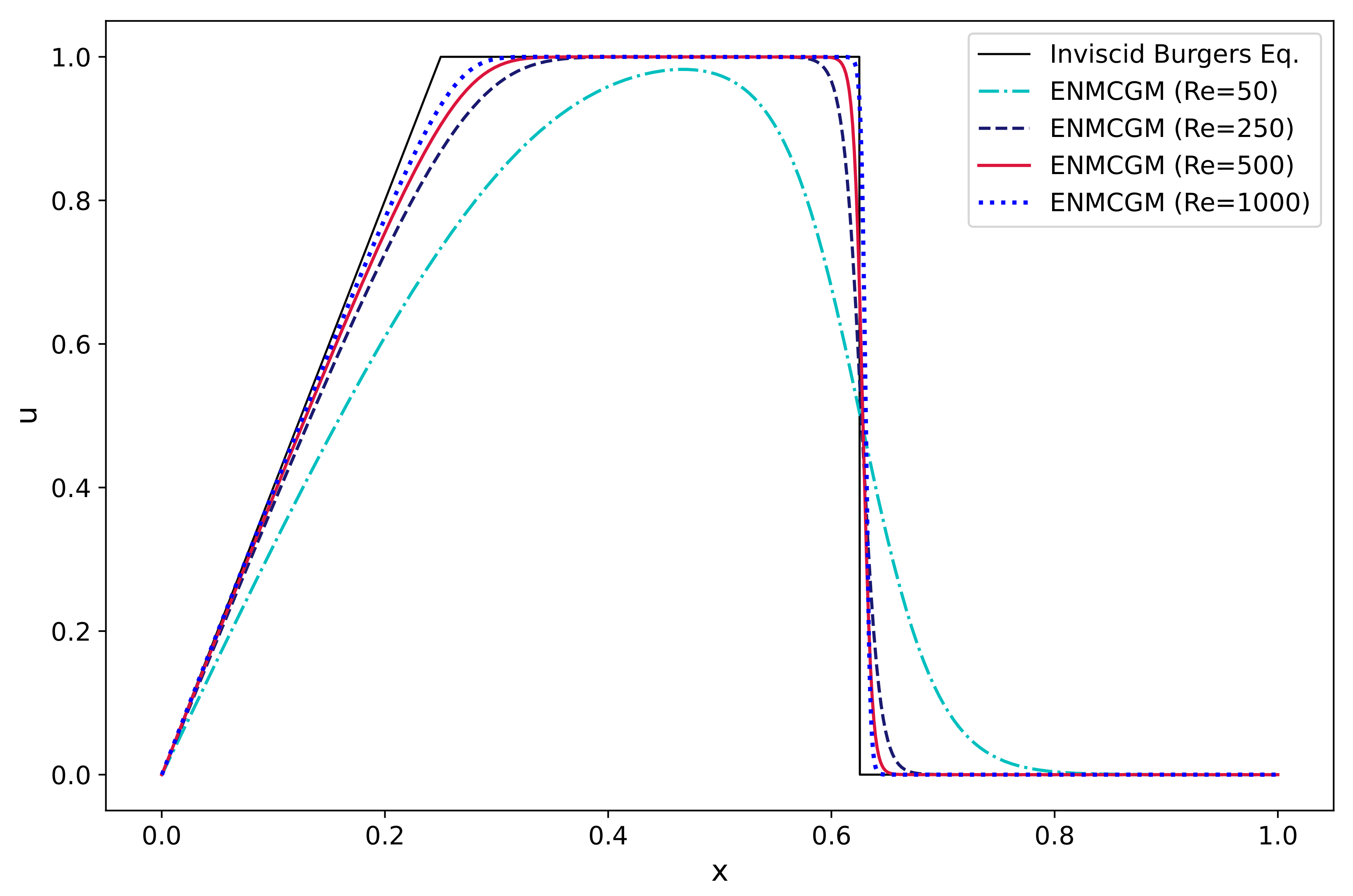
Example 5. In this example, we verify the presented method by solving Equation (1) with the following ICand the BC: , , . The inviscid Burgers’ equation below with the above IC and BC constitute a Riemann problem,Its exact solution can be obtained by the characteristic method, that isFrom Equation (1), we can find that Burgers equation is just Equation (48) plus a viscosity item. Thereby, the solution of Equation (48) is actually smoothed by the diffusion term in Equation (1). In order to examine such smoothing behavior, we solve Equation (1) for varied Reynolds numbers and times. This comparison test has also been investigated by Chen and Jiang [32]. Figure 15 compares our results for Burgers’ equation Equation (
1) with the exact solution in Equation (
49) for different Reynolds numbers, i.e.,
. In the computation,
MEs are used, and the time step size is set as
. This comparison effectively demonstrates that as the Reynolds number increases, the solutions of Equation (
1) and the inviscid Burgers’ equation converge closer to each other. The figure depicts the presence of both rarefaction waves and shock waves, with no evidence of spurious oscillations in the numerical results.
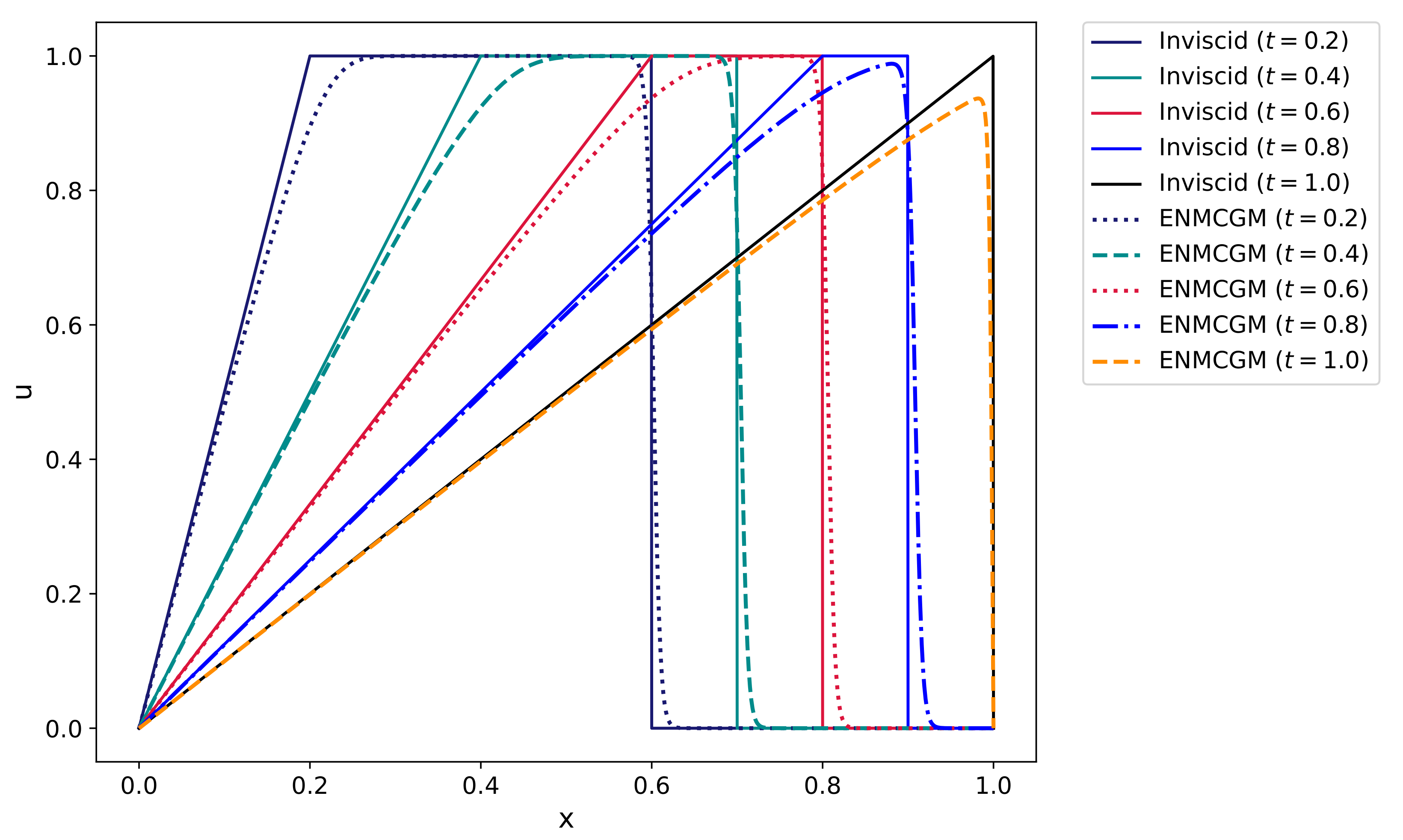
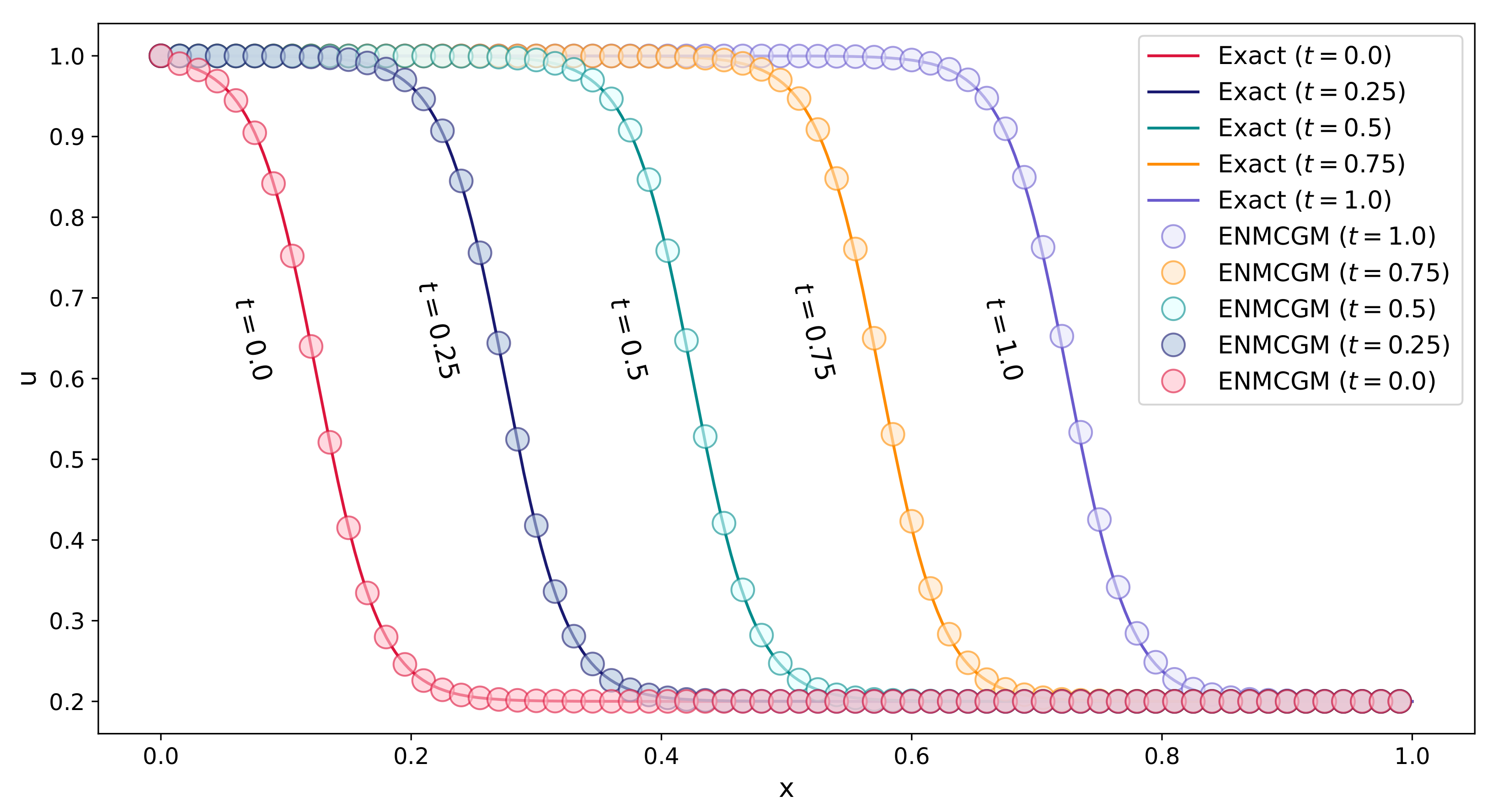
In
Figure 16, we further demonstrate the results computed by the present method for different times. The Reynolds number
is used and the settings for the MC mesh and time step size are still
and
. From the plots, we can observe the wave front propagating towards the right as time progresses. It is evident that the inclusion of the viscosity term in the inviscid Burgers’ equation produces the smoothing of the solution. The curves obtained by the ENMCGM for Burgers’ equation are accordant with the analytical solution of the inviscid Equation (
48) very well.
Example 6. Consider the following soliton solution of Burgers’ equation (Equation (1)),where the constants α and β are related to the amplitude and width of the soliton, respectively, μ represents the constant speed of the soliton, . In this problem, we use the coefficients
for comparison with the results produced by Dogan [
7]. The IC is just Equation (
50) itself when
. The BC can be obtained by the limitations at the two boundaries:
This problem is solved by the ENMCGM using the MC mesh with
MCs and the time step size
.
Table 9 lists our results in contrast to the reference results [
7] at
. The comparison shows that our data corroborate with the exact solution.
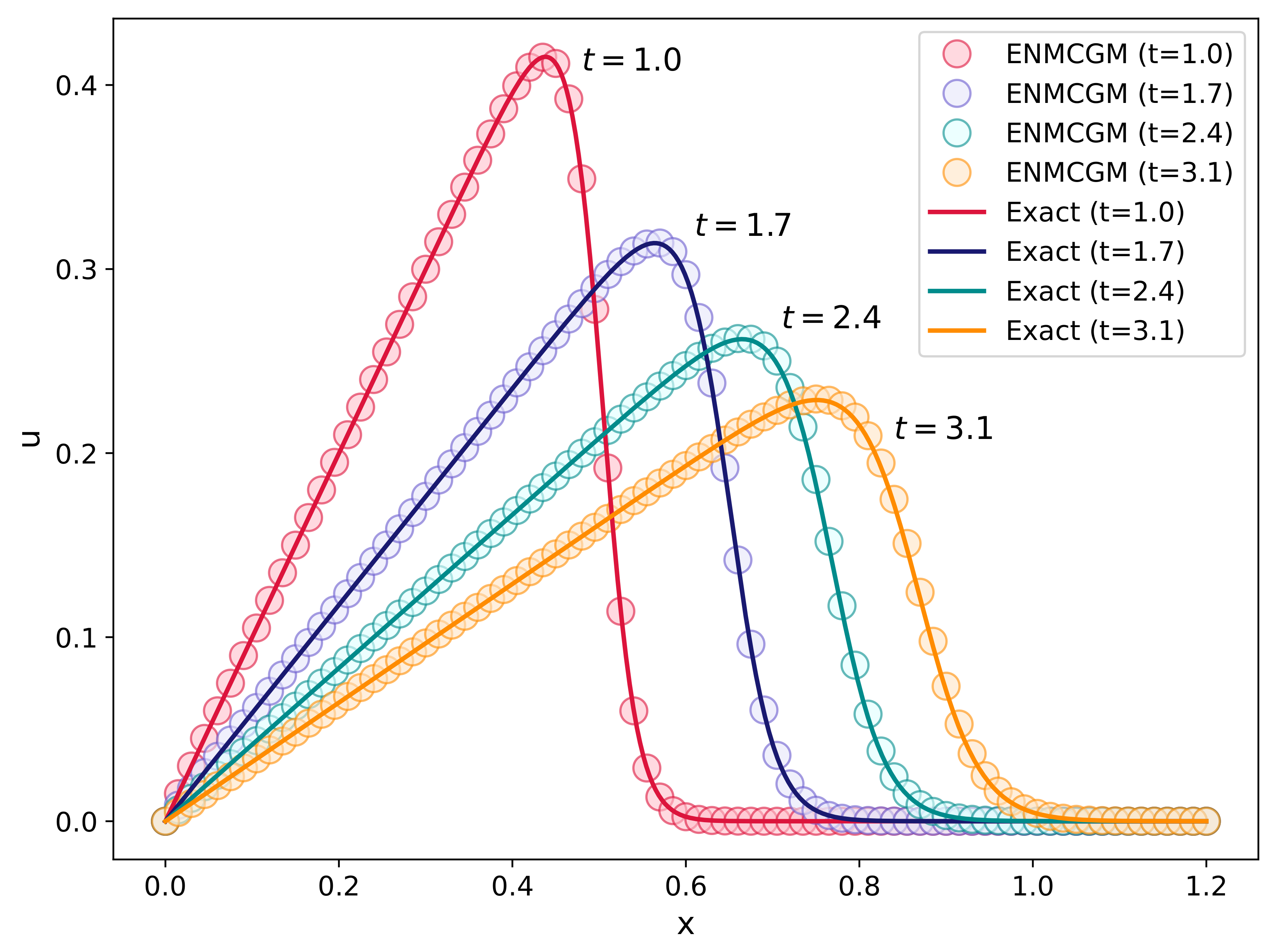
In
Figure 17, more tests on this problem for
are implemented at different times. We can observe the traveling waves maintain their shape and speed as they propagate to the right. The wave shapes are present at different times, as evident by the analytical solution.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}