1. Introduction
The concept of a group endowed with the structure of a smooth manifold, along with its tangent space at the identity of a group structured as a Lie algebra, plays a crucial role in differential geometry, classical mechanics, and theoretical physics. The development of the theory of Lie groups and algebras began with Sophus Lie’s work on the symmetries of differential equations and can be seen as an analog to Galois theory for differential equations. The development of the theory of Lie groups and algebras is closely intertwined with the development of theoretical physics. The development of supersymmetric field theories that emerged in the 1970s is based on the concept of Lie superalgebra, which can be considered a generalization of the concept of Lie algebra.
The development of the theory of Lie algebras has led to numerous generalizations of the concept. One such generalization arose from extending the concept of Lie algebra to algebraic structures with
n-ary multiplication laws. This generalization is referred to as
n-Lie algebra and it was proposed and developed by Filippov [
1]. Independently, Nambu proposed a generalization of Hamiltonian mechanics based on the notion of an
n-ary Poisson bracket [
2]. It was later demonstrated that an
n-ary Poisson bracket in Nambu’s framework satisfies an
n-Lie algebra identity (now referred to as the Filippov–Jacobi or Fundamental Identity) and thus induces an
n-Lie algebra structure on a vector space of smooth functions. It should be noted that the concept of
n-Lie algebra turned out to be fruitful, and in the early 2000s, this structure was used in the theory of M2-branes [
3,
4]. It is interesting to note that the quark model served as a motivation for Nambu to construct a generalization of Hamiltonian mechanics.
In this paper, we propose a new approach to extend the concept of Lie algebra to algebraic structures with ternary multiplication laws. Our approach is distinct from the Filippov–Nambu approach. To explain this difference, we briefly recall the main properties of
n-Lie algebras. First, an
n-ary Lie bracket of
n-Lie algebra is completely skew-symmetric, and, second, the Filippov–Jacobi identity is an extension of the Leibniz rule to a double
n-ary Lie bracket. The main examples of
n-ary Lie brackets in
n-Lie algebras are constructed using determinants. By this, we mean that the theory of
n-Lie algebras lacks an important construction that makes it possible to construct a Lie algebra using a commutator. It is well known that if
is an associative algebra over a field of real or complex numbers with multiplication
then one can construct a Lie algebra by equipping
with a Lie bracket defined via the commutator
. The commutator satisfies the Jacobi identity, as follows:
and
becomes the Lie algebra. This construction is very important since it opens up the possibility of constructing a wide and important class of matrix Lie algebras.
Let us consider in more detail the above construction of a Lie algebra via the commutator. First of all, we are interested in why the commutator satisfies the Jacobi identity. It is easy to verify that when we expand all the double commutators in the left-hand side of the Jacobi identity (
1), each permutation of the three elements
appears twice in the resulting expression—once in the form of the product
, and again as
, with these two products having opposite signs. Thus, due to associativity, where
, the result is zero. Our goal in this paper is to extend this construction to ternary algebras, that is, to construct a ternary commutator and find an identity for this ternary commutator (analogous to the Jacobi identity), based on ternary associativity.
Let
be a vector space over the field of complex numbers
endowed with a ternary multiplication, as follows:
By ternary multiplication, we refer to a trilinear mapping that assigns to each triple of elements in a complex vector space
a uniquely defined element within the same space
. In the case of ternary multiplication, there are two kinds of associativity. Ternary multiplication is said to be associative of the first kind if it satisfies the following conditions:
and associative of the second kind if we have the following:
In the present paper, we use the terminology proposed in [
5]. As pointed out in [
6], it should be noted that the associativity types of the second kind are also called weak associativity [
7], quasi-associativity [
8], para-associativity [
9], type B associativity [
10], pseudo-associativity [
11], and generalized associativity [
6]. Note that in the case of the associativity of the first kind, shifting the round brackets from left to right does not change the order of the factors in a product, and in the case of the associativity of the second kind, shifting the round brackets from left to right swaps elements
b and
d. If we do not assume that
has a vector space structure, i.e.,
is a set, then
together with a ternary multiplication that satisfies the associativity of the second kind is referred to as a semi-heap [
12]. In what follows, a complex vector space
equipped with a ternary multiplication that satisfies either the associativity of the first (
2) or second kind (
3) will be referred to as a ternary algebra. Hence, all ternary algebras considered in this paper are assumed to be over the field of complex numbers
.
In the case of an algebra with a binary multiplication law, there are two ways to place brackets in a product , indicating the order of multiplication: , that is, and . If the multiplication is associative, these two products are equal. Therefore, by multiplying one of these products by −1 and adding them together, we obtain zero due to associativity. This principle forms the basis of the Jacobi identity.
With ternary multiplication, there are three ways to place round brackets in a product of five elements. In the case of the first kind associativity, we can do as follows:
and similar considerations apply in the case of the second kind of associativity:
The main idea of the present paper is that we can identify an analog of the Jacobi identity for ternary algebras if we follow the previously described scheme, that is, we multiply each of the three products in (
4) or in (
5) by some number, add three resulting products and, by virtue of the ternary associativity of the first or second kind, obtain zero. We believe that using −1 in the ternary case looks unnatural, as it makes the whole construction asymmetrical and awkward. But the cube roots of unity fit perfectly into this scheme. Indeed, there are three cube roots of unity
, where
is a primitive cube root of unity and
is its complex conjugate. Now, if we multiply each product in (
4) and (
5) by a distinct cube root of unity and then add the resulting products, we obtain zero due to ternary associativity and the property of cube roots of unity, where
. For example, we have the following:
and this equality can be considered a ternary analog of the binary one
The above reasoning leads to the conclusion that, in the case of ternary algebra
, an analog of the binary commutator can be constructed via the cube roots of unity. We propose a ternary commutator, which is a linear combination of all six permutations of its arguments, and the coefficients of this linear combination are the cube roots of unity. Thus, we endow a ternary algebra
with the ternary commutator defined by the following formula:
The structure of this ternary commutator is in line with the ideas, methods, and structures developed in References [
13,
14,
15]. The ternary commutator (
7) proposed in the present paper differs in its properties from a 3-Lie bracket of 3-Lie algebra. Indeed, the ternary commutator (
7) is not skew-symmetric; therefore, the presence of two equal arguments does not make it identically zero. However, in the case where all three arguments are equal, it is identically zero. Here, we see an analogy with the ternary generalization of the Pauli exclusion principle proposed by Kerner [
16]. According to this principle, a wave function of a quantum system of three particles does not vanish in the case of two particles with identical quantum characteristics, but it vanishes identically when the system contains three of such particles.
We find an identity for the ternary commutator (
7). The left-hand side of the Jacobi identity is the sum of three double commutators obtained by cyclic permutations of arguments. Hence, the structure of the left-hand side of the Jacobi identity is determined by the subgroup of cyclic permutations of three elements,
. It is natural to assume that an identity for the ternary commutator (
7) should be also based on a subgroup of the symmetric group
, and it is. The identity we found is based on the general affine group,
. Thus, the left-hand side of identity has 20 terms, but in some cases of ternary multiplication with commutativity with respect to the first two arguments, it decreases to 10 terms. The identity has the following form:
where the symbol ⥀ stands for cyclic permutations of five elements and
.
Motivated by this result, we propose a notion of ternary Lie algebra at cubic roots of unity or, more briefly, ternary
-Lie algebra, where
is a primitive cube root of unity. We present the definition of a ternary
-Lie algebra, construct several examples via associative ternary multiplications of rectangular and three-dimensional (cubic) matrices, and identify the complete classification of two-dimensional ternary
-Lie algebras, containing four non-isomorphic algebras. In order to construct the examples, we use the ternary multiplication of rectangular matrices. This ternary multiplication is defined on a vector space of complex rectangular
-matrices
, as follows:
where the right-hand side of the above formula is the usual matrix product of
-matrix
A,
-matrix
(transposed of
B), and
-matrix
C. It is easy to verify that this ternary multiplication is associative of the second kind. The rest of the ternary multiplications that we will use are defined on a vector space of complex three-dimensional (cubic) matrices, and they are given in the following theorem: [
17].
Finally, we propose the complete classification of two-dimensional ternary
-Lie algebras at cube roots of unity. This classification consists of four non-isomorphic two-dimensional ternary
-Lie algebras. In this classification, we use the structure constants
of a ternary
-Lie algebra. The structure constant is a (1,3)-tensor and we derive the system of equations for this tensor from Identity (
8).
2. Ternary Commutator and Its Symmetries
In this section, we explain why we call the expression on the right-hand side of (
7) a ternary commutator. In addition, we describe the symmetries of the ternary commutator, define its conjugate ternary commutator, and derive a formula for the ternary commutator using sixth-order roots of unity.
The concept of a commutator is closely related to the notion of commutativity. In the case of binary multiplication,
, two elements,
, are referred to as commuting if the equality
holds. Now, one introduces a commutator as an expression that vanishes on commuting elements, that is,
. In the case of
n-ary multiplication, where
, commutativity can be defined in different ways, depending on how we interpret commutativity in the binary case. For our purposes, it is convenient to interpret the binary commutativity as follows: We split a product into two parts; rearranging these parts does not change the value of a product. In this form, commutativity can be extended to
n-ary multiplication laws. Assume that we have an
n-ary product
and we split it into two parts as follows:
where
. Then, an analog to the previously mentioned interpretation of binary commutativity could be an
n-ary multiplication with the following property: for any partition of an
n-ary product into two parts (
9), rearranging these two parts does not alter the value of the product, i.e.,
Applying this approach to the case of ternary multiplication results in only one condition, that is, for any three elements,
, of a ternary algebra, the following holds:
Thus, this relation shows that any cyclic permutation of arguments in a triple product
does not change the value of this product. Property (
10) of a ternary multiplication will be referred to as the cyclic commutativity of a triple product. Generally, if a ternary multiplication is cyclic-commutative, then for any three elements,
, of a ternary algebra, there are two sets of equal triple products,
, and
. If we additionally assume that a ternary multiplication is abelian [
18], that is,
, then all six permutations of three arguments in a triple product will be equal. A simple example of a ternary algebra that is both cyclic-commutative and abelian can be constructed with the help of complex diagonal three-dimensional matrices of the second order, along with ternary multiplication 3, as given in Theorem 1. A three-dimensional second-order matrix
A will be written as follows [
19]:
A three-dimensional second-order matrix
is referred to as diagonal if the entries
are different from zero, but all other entries are equal to zero. Let
be diagonal three-dimensional second-order matrices. We denote the following:
Then, by applying ternary multiplication 3 defined in Theorem 1 (denoted by ·), we obtain the triple product, as follows:
which is also a diagonal three-dimensional second-order matrix. From this, it follows that the vector space of diagonal three-dimensional second-order matrices endowed with ternary multiplication 3 (Theorem 1) is an abelian cyclic-commutative ternary algebra. Although ternary multiplication 3 has the associativity of the second kind, when restricted to diagonal three-dimensional matrices, it also has the associativity of the first kind.
Now, in order to construct a ternary commutator, we combine all six products into a linear combination in such a way that, first, we use the cube roots of unity, and, second, when the cyclic-commutative condition (
10) is satisfied, this combination vanishes. Hence, we consider the following expression:
where
are elements of a ternary algebra and
is a primitive third-order root of unity. We will refer to this expression as ternary commutator and denote it using square brackets, as follows:
We would like to draw another analogy between the binary commutator and the ternary commutator (
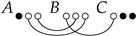
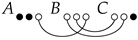
13); this analogy is based on geometric reasoning. In the case of binary multiplication
, it is natural to place the factors
at the ends of a segment and compose their products by taking the element that stands at the left end of the segment as the first factor. The permutation of factors in a product
corresponds to the rotation of a segment around the center by the angle of
. Thus, the binary commutator can be interpreted in such a way that we take the product
determined by the initial position of the segment and add to it the product determined by the segment rotated by the angle of
, multiplied by the coefficient
, that is,
.
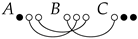
In the case of ternary multiplication, we should use a regular triangle to graphically represent a triple product
. We will arrange the three factors,
, of this product at the vertices of a triangle, placing the first factor,
a, at the lower right vertex and going around the triangle clockwise. Then, rotating the triangle around its center by the angle of
counterclockwise will give us the first cyclic permutation,
, and rotating it by the angle of
will give us the second,
. So, they must enter into the expression for the ternary commutator with the factors
. The second part of the expression for the ternary commutator is obtained by mirroring the described construction:
![Axioms 13 00687 i002]()
It is useful to introduce the conjugate ternary commutator
which is calculated on elements (
) of a ternary algebra as follows:
Thus, the conjugate ternary commutator
is obtained from the ternary commutator (
13) by replacing each cube root of unity with its conjugate. Then, we have the following:
It is easy to verify that the ternary commutator (
13) and its conjugate (
14) transform under cyclic permutations of their arguments, as follows:
From (
15), it follows that the sum of three ternary commutators obtained by cyclic permutations of arguments is equal to zero, as follows:
Concerning this important property of the ternary commutator (
13), we have to make three remarks. The first remark concerns Lie triple systems that arose in differential geometry in connection with the study of totally geodesic submanifolds [
20]. Although property (
17) of the ternary commutator (
13) has the same form as one of the requirements in the definition of a Lie triple system, the ternary commutator (
13) is not a Lie triple system because it is not skew-symmetric in the first two arguments and does not satisfy the Filippov–Jacobi identity.
The second remark concerns 3-Lie algebras. The ternary Lie bracket in 3-Lie algebra is skew-symmetric in its arguments and, thus, in general, it does not satisfy Equation (
17). In the next section, we will identify an identity for the ternary commutator (
13) and demonstrate how this identity differs from the Filippov–Jacobi identity. Thus, the ternary commutator (
13) imparts a structure on a ternary algebra
that is different from that of a 3-Lie algebra.
The third remark concerns a relation with theoretical physics. It is easy to see that two equal arguments in our ternary commutator (
13) do not make it vanish identically. But in the case, where all three arguments (
) are equal, our ternary commutator vanishes identically, i.e.,
. Here, we see a possible connection with the ternary generalization of the Pauli exclusion principle proposed by Kerner [
16]. We will discuss this connection in
Section 6.
It is worth mentioning that Nambu, in Reference [
2], which is devoted to the generalization of Hamiltonian mechanics, discussed the problem of quantizing generalized Hamiltonian mechanics. In this context, he considered the skew-symmetric ternary commutator as follows:
where
are linear operators. This version of a ternary commutator can be considered a direct extension of the skew-symmetry of the binary commutator to the case of ternary multiplication. However, to our knowledge, no analog of the Jacobi identity based on ternary associativity has been found for such a ternary commutator. It is interesting that our ternary commutator (
13) can also be written in a form where the three even permutations have a plus sign, and the three odd permutations have a minus sign. For this purpose, we will need a primitive sixth root of unity, which will be denoted by
. We take
. Among other relations, we have the following:
Now, we can write the ternary commutator (
13) in the following form::
In this formula, even permutations have the plus sign and are multiplied by even powers of the sixth root of unity
, and odd permutations have the minus sign and are multiplied by odd powers of the sixth root of unity. Now, the symmetries of the ternary commutator can be written in the following form:
Formula (
20) can be written in the following form:
We can use this formula to justify the term “ternary commutator”, which we use in relation to the expression on the right-hand side of (
13). In the above formula, each of the three terms enclosed in round brackets can be interpreted as measuring the non-commutativity of the ternary multiplication with respect to the first two arguments in relation to the last, which does not change its position. Geometrically, it would be convenient to depict the three elements (
) of a ternary algebra
as the vertices of a regular triangle. Then, the above formula “measures” the non-commutativity of a ternary multiplication on each side of the triangle with respect to the opposite vertex. Thus, geometrically, the transition from binary multiplication—where two factors can be represented as points on a line—to ternary multiplication can be described as leaving a line and going to a plane, figuratively speaking. This explains why the above formula contains sixth-order roots of unity and conjugation. To measure ternary non-commutativity correctly, we need to use plane rotations and reflections. It should be noted here that in [
18] the authors developed an interesting graphical and diagrammatic approach for representing ternary associative multiplication by using triangles in the plane.
In particular, if a ternary multiplication is commutative with respect to some pair of arguments, for example, the first pair, that is,
, then Formula (
21) reduces to a shorter form containing only three terms. Indeed, we have the following:
3. General Affine Group, Basic Identity, and Ternary Lie Algebra at the Cube Root of Unity
The concept of a Lie algebra consists of two important components: firstly, a Lie bracket (or, specifically, the binary commutator) and its properties regarding permutations of arguments along with the Jacobi identity. Since we have the ternary commutator defined and considered in the previous section, our goal is to now identify an identity for the ternary commutator (
13) based on ternary associativity. Following the analogy with the binary commutator, we could estimate how many terms a possible identity could contain. If we consider the binary case then each double commutator, when expanded, yields four products. But if we expand all the double commutators at the left-hand side of identity, then in the resulting expression, each product of three elements (in total, we have six permutations) will occur twice (the brackets are either on the left or on the right). Thus, we will have twelve products on the left-hand side of the identity. Dividing twelve by four, we conclude that an identity consists of three double commutators, as is the case with the Jacobi identity.
A similar calculation can be made in the case of the ternary commutator (
13). If we expand the double ternary commutator
, we obtain thirty-six terms. On the other hand, we have one hundred and twenty permutations of five elements. Due to ternary associativity, each permutation must occur at least three times (brackets on the left, in the center, and on the right) with coefficients
. Thus, dividing three hundred and sixty by thirty-six gives ten. Note that this is the minimum number of terms in a possible identity. In this calculation, we do not take into account such an important structure of the ternary commutator as conjugation. Obviously, if we take this structure into account, we will have to double the number of terms in the identity, i.e., we can expect that a possible identity will contain twenty terms.
Since the identity we are looking for is a sum of double ternary commutators of the form , the second assumption, which seems very natural, is that an identity must be based on a subgroup of a symmetric group, . Taking into account the above, we conclude that there are two potential candidates for the subgroups of the symmetric group ; these are the dihedral group (10 elements) or the general affine group (20 elements). Moreover, the dihedral group is a subgroup of the general affine group, that is, .
The general affine group
has several different representations. In this article, we will use the representation of this group by permutations of five elements. The minimal set of permutations that generates the entire group consists of two cycles, which we denote as follows:
Hence, we have the following:
and
Then, we have the following:
where
e is the identity element of the group
All elements of the group can be written in the following form:
We will use this representation to write the identity. In this representation, all elements of the general affine group are divided into four sets (
25)–(
28), and in each of these sets, the second element is obtained by a cyclic permutation of five elements in the first, the third by a cyclic permutation in the second, and so on. For a more compact representation of an identity, we will use the symbol ⥀. This symbol means that an expression that follows contains five elements and must be subjected to the following procedure. One should form the sum of five expressions, starting with the initial one, where each subsequent one is a cyclic permutation of five elements of the previous one. Thus, we have the following:
where
are elements of a ternary algebra
. We have the following:
Theorem 2. Let be a ternary algebra. Then, for any , the ternary commutator (13) and its conjugate (14) have the following property:and the ternary commutator satisfies the identity, as follows: In what follows, we refer to the statement of Theorem 2 as the basic identity:
Proof. We prove Theorem 2 by direct computation, that is, by applying Formula (
13) twice to each term of the basic identity and using a ternary associativity of multiplication. We carried out this computation using a computer program containing a non-commutative symbolic calculus. The computer program makes it possible to study the structure of the basic identity. A study of the structure of the basic identity shows that it holds due to the reasoning explained previously with the help of Formulas (
4)–(
6). Let us denote
. The computer program enables us to determine in which terms of the basic identity a particular product of elements
appears, along with the associated coefficients and the placement of the round brackets. For example, the product
appears six times as follows:
and
Here, in the first line, we show the double ternary commutators of the basic identity, and below them, we show in which forms, that is, the coefficient and position of the round brackets, the product
appears in the corresponding double commutator. By adding up the six terms obtained in this case and assuming the associativity of the first kind, the result is zero.
In the case of the ternary associativity of the second kind, in addition to the above table, we should also consider the set of double ternary commutators on the left-hand side of the basic identity that includes the product
, summarized as follows:
and
A comparison of the columns in the center of these tables immediately shows that—in the case of the ternary associativity of the second kind—we obtain the same type of sum, which is equal to zero. □
Thus, the basic identity consists of 20 double ternary commutators. The general affine group, considered as a subgroup of the permutations of the symmetric group
, is generated by two cycles
. The double ternary commutators are as follows:
are determined by the permutations
, that is, by the first elements of the general affine group
in Formulas (
25)–(
28). The cyclic permutations of the double ternary commutators (
29) are determined by the elements in (
25), (
26), (
27), and (
28), respectively, starting from the second element. Note that the elements in (
25) and (
27) form the dihedral subgroup
of the symmetric group
.
Theorem 2 motivates the introduction of the following notion:
Definition 1. Let be a vector space over the field of complex numbers. Then, is said to be a ternary Lie algebra at cube roots of unity if is endowed with a ternary bracket , which transforms under the cyclic permutations of its arguments as follows:where ω is a primitive cube root of unity, is its conjugate, , and a ternary bracket satisfies the identity, as follows: In order to simplify the terminology, a ternary Lie algebra at cube roots of unity will also be referred to as a ternary
-Lie algebra. Property (
30) will be referred to as
-symmetry of the ternary bracket. Identity (
31) will be referred to the basic identity.
Definition 2. Let be a ternary ω-Lie algebra and be its subspace. Then, is said to be an ideal of a ternary ω-Lie algebra if, for any and , it holds A ternary ω-Lie algebra is said to be simple if it has no non-trivial ideals, that is, it has no ideals other than and .
Let
be a ternary
-Lie algebra, where
is an
n-dimensional vector space, and
be the basis for a vector space
. In analogy with the binary case, we introduce the structure constants of a ternary
-Lie algebra as follows:
where
will be referred to as structure constants of a ternary
-Lie algebra
. It is easy to see that
. In (
32), we used the Einstein convention of summation over repeated indices. Obviously, the structure constants of a ternary
-Lie algebra can be considered as complex-valued tensors of type
. This tensor has the
-symmetry with respect to the cyclic permutations of its three subscripts, as follows:
For every value of the superscript
, the structure constants of a ternary
-Lie algebra
, that is, both
and
, satisfy the following equation:
where
is a covariant tensor of order 3. It is evident that the third-order covariant tensors defined on the vector space
, which satisfy Equation (
34), form the subspace in the vector space of covariant tensors of order 3. This subspace will be denoted by
.
Formula (
33) clearly shows that for any superscript
m, the structure constants
,
are the eigenvectors of the linear operator in
induced by the cyclic permutation
with eigenvalues
, respectively. Thus, we have the following:
where
Thus, for each value of the superscript
m, the structure constants
of a ternary
-Lie algebra
belong to subspace
, and the structure constants
belong to subspace
.
Here, we would like to note an important connection between the structure constants of a three-dimensional ternary
-Lie algebra and irreducible representations of the rotation group. Let
, i.e., we are considering a three-dimensional ternary
-Lie algebra. Let
be a real orthogonal matrix with determinant 1. Then, we have the following formula:
where
, defines a linear representation of the rotation group
in the space
. If we add to Equation (
34) the condition of tracelessness of a tensor
for any pair of subscripts, then Formula (
36) defines a twice repeated irreducible representation of the rotation group in the corresponding subspace of third-order covariant tensors [
21]. Now, the decomposition (
35) splits this two-fold irreducible representation into two irreducible ones, respectively, in subspaces
and
(with the additional condition that a tensor
is traceless). Note that the subspace of traceless tensors in
is a five-dimensional Hermitian space and the explicit description of this space can be found in [
14]. In the next paper, we plan to use this connection with irreducible representations of the rotation group to classify three-dimensional ternary
-Lie algebras.
It follows from the basic identity (
31) that the structure constants of a ternary
-Lie algebra
satisfy the system of equations, as follows:
In this formula, the symbol ⥀ means that in an expression that follows it, one should perform the five cyclic permutations of the underlined subscripts and then take the sum of obtained expressions. For instance, if we apply ⥀ to the first term in (
37), we obtain the following:
4. Examples of Ternary Lie Algebra at Cube Roots of Unity
In this section, we give some important examples of ternary associative algebras and consider ternary
-Lie algebras that are induced by the ternary commutator (
13). A wide class of ternary associative algebras can be constructed using square matrices. Indeed, if
are square matrices of order
n, we can consider the ternary product
. This definition is correct since matrix multiplication is associative. Obviously, in this case, we obtain ternary multiplication with the associativity of the first kind. However, from our point of view, this example is of little interest from the ternary point of view, because, firstly, ternary multiplication is constructed using binary, that is, binary is more fundamental than ternary, and, secondly, for square matrices, there is a deeply developed theory of (binary) Lie algebras. Therefore, in this section, we will consider examples of ternary algebras constructed using either rectangular (two-dimensional) matrices or cubic (three-dimensional) matrices. Thus, the notion of a ternary
-Lie algebra proposed in this paper can be considered as an extension of the concept of Lie algebra to rectangular and cubic matrices. Note that, firstly, the ternary multiplications considered in this section cannot be reduced to binary ones, and, secondly, they are associative of the second kind.
One of the simplest examples of ternary algebra with the associativity of the second kind is an
n-dimensional complex vector space
with a
-valued bilinear symmetric form
B defined on it. Then, the ternary multiplication in
will be defined as follows:
It is easy to verify that this ternary product is associative of the second kind. Indeed, we have the following:
and, due to the symmetry
, we see that all three products are equal. Hence, if we endow a vector space
with the ternary commutator (
13), then according to Theorem 2, it becomes a ternary
-Lie algebra. In this case, the ternary commutator can be written as follows:
Omitting the irrelevant factor
, we can consider the ternary commutator (
13) and its conjugate in a reduced form, as follows:
It is easy to verify that the reduced ternary commutator (
39) and its conjugate (
40) have the same transformation properties under cyclic permutations of arguments (
15) and (
16) as the full-length commutator (
13) and its conjugate. It is interesting to note that in this particular case the reduced ternary commutator (
39) satisfies a reduced version of the basic identity, which contains only ten terms, as follows:
The basic identity contains two copies of the dihedral group
. The dihedral group
contains a subgroup of cyclic permutations
. Thus, the reduced identity (
41) is obtained by reducing each copy of the dihedral group
to its cyclic subgroup
.
Let us consider a special case of a ternary
-Lie algebra constructed using ternary multiplication (
38). Let us consider
n-dimensional vectors of
as row matrices. Then, we can put
, where
is the column matrix. Thus, we have the ternary
-Lie algebra, where the underlying vector space is the
n-dimensional complex vector space
and the ternary commutator is defined by the following formula:
In this particular case, we can easily compute the structure constants of the ternary
-Lie algebra. Indeed let
be the canonical basis for
, that is, the
ith coordinate of a vector
is 1, all other coordinates are equal to zero. Then, the structure constants of this ternary
-Lie algebra are as follows:
If we calculate the structure constants of the ternary
-Lie algebra (
42) for the simplest case of
, then we obtain the following:
We denote the two-dimensional ternary
-Lie algebra with commutation relations (
44) by
.
Let
be a vector space of complex
nth-order square matrices. Then, the ternary product (
38) can be applied to
if we take
, where
. Then, the ternary commutator (
39) takes on the following form:
Hence, the ternary commutator (
45) induces a structure of ternary
-Lie algebra on a complex vector space
. It is interesting to note that the ternary commutator, which is also constructed via the trace and cyclic permutations of arguments, is as follows:
where square brackets on the right-hand side of this formula denote the commutators of two matrices, that is,
, inducing a structure of 3-Lie algebra on a vector space
. The ternary commutator (
46) was introduced in [
22] to construct a quantization for generalized Hamiltonian mechanics proposed by Nambu. It should be mentioned that the ternary commutators (
45) and (
46) have different properties with respect to permutations of arguments. That is, our ternary commutator (
45) has
-symmetry, while the ternary commutator (
46) is totally skew-symmetric.
The example of a ternary
-Lie algebra with ternary commutator (
42) is a special case of a more general construction. In other words, we can extend the ternary commutator (
42) to rectangular matrices of arbitrary dimensions. Let
be a vector space of complex
-matrices. One can define the ternary product of three
-matrices
as follows:
where, in this formula, the right side denotes the usual matrix multiplication, and
stands for transposed matrix. It is easy to verify that this ternary product of
-matrices has the associativity of the second kind. Hence, we can endow the complex vector space
with the following ternary commutator:
and the complex vector space
of rectangular
-matrices becomes a ternary
-Lie algebra.
The ternary multiplications of three-dimensional matrices given in Theorem 1 make it possible to construct numerous examples of ternary -Lie algebras. The simplest example can be constructed using diagonal three-dimensional matrices of the second order. Taking ternary multiplication 3 (Theorem 1), we obtain, as shown above, an abelian cyclic-commutative ternary algebra. It follows that for any three diagonal three-dimensional matrices, their ternary commutator is zero. If the ternary commutator of any three elements in a ternary -Lie algebra is zero, then this algebra is termed Abelian. Hence, the ternary -algebra consisting of diagonal three-dimensional second-order matrices provides an example of a two-dimensional Abelian ternary -Lie algebra.
The next example of a two-dimensional ternary
-Lie algebra will be constructed using three-dimensional traceless matrices of the second order. As a ternary product of three-dimensional matrices, we will use ternary multiplication 3 (Theorem 1), although it is worth noting that we could equally well use ternary multiplication 4. Let
be a three-dimensional matrix of the second order, that is,
. We will call a three-dimensional matrix
A traceless if the trace of this matrix with respect to any pair of subscripts is zero. Hence, for any
we have the following:
where
The ternary
-Lie algebra of three-dimensional matrices of the second order is an 8-dimensional algebra. Traceless matrices form a two-dimensional subspace in this algebra, and it is easy to show that this two-dimensional subspace is closed under the ternary commutator (
13); that is, traceless three-dimensional matrices of the second order form a subalgebra of the ternary
-Lie algebra of three-dimensional matrices of the second order. From condition (
48), it follows that—in the case of a three-dimensional matrix of the second-order
A—we have two independent parameters,
, and all other entries of the matrix are expressed through them, that is,
We arrange the entries of a three-dimensional matrix of the second-order
A in space, that is, in the vertices of the cube, as follows:
![Axioms 13 00687 i003]()
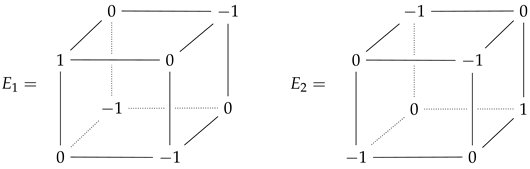
Thus, as generators of the ternary
-Lie algebra of three-dimensional traceless matrices of the second order, we can take two three-dimensional matrices
, where we have the following:
![Axioms 13 00687 i004]()
We calculate the ternary commutator as follows:
we identify the commutation relations of the ternary
-Lie algebra of three-dimensional traceless matrices of the second order, as follows:
Thus, we construct one more realization of the two-dimensional ternary
-Lie algebra
using three-dimensional traceless matrices of the second order.




 It is useful to introduce the conjugate ternary commutator which is calculated on elements () of a ternary algebra as follows:
It is useful to introduce the conjugate ternary commutator which is calculated on elements () of a ternary algebra as follows: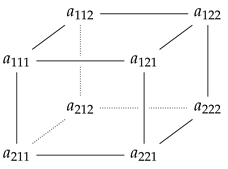 Thus, as generators of the ternary -Lie algebra of three-dimensional traceless matrices of the second order, we can take two three-dimensional matrices , where we have the following:
Thus, as generators of the ternary -Lie algebra of three-dimensional traceless matrices of the second order, we can take two three-dimensional matrices , where we have the following:
 We calculate the ternary commutator as follows:
We calculate the ternary commutator as follows: