
Exact Solutions to Fractional Schrödinger–Hirota Equation Using Auxiliary Equation Method

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Preliminaries
2.1. Conformable Fractional Derivatives
- 1.
- for any constant λ;
- 2.
- for any ;
- 3.
- for any ;
- 4.
- ;
- 5.
- ;
- 6.
- When is differentiable in the normal sense, .
2.2. Auxiliary Equation Method
3. Application of Auxiliary Equation Method to FSH Equation
4. Exact Solutions of FSH Equation
4.1. Method for Derivation of Exact Solutions
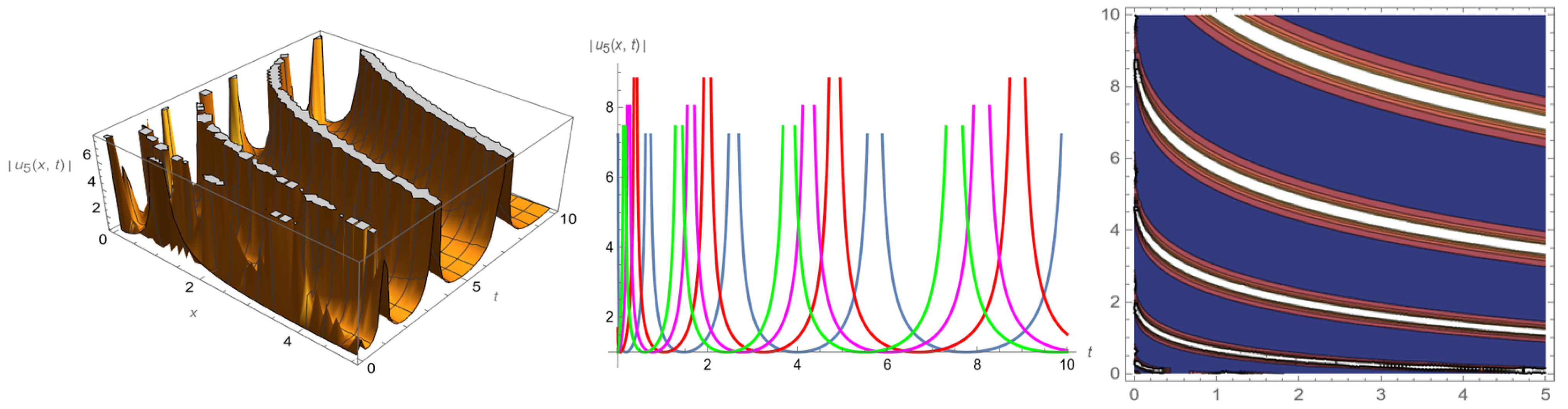
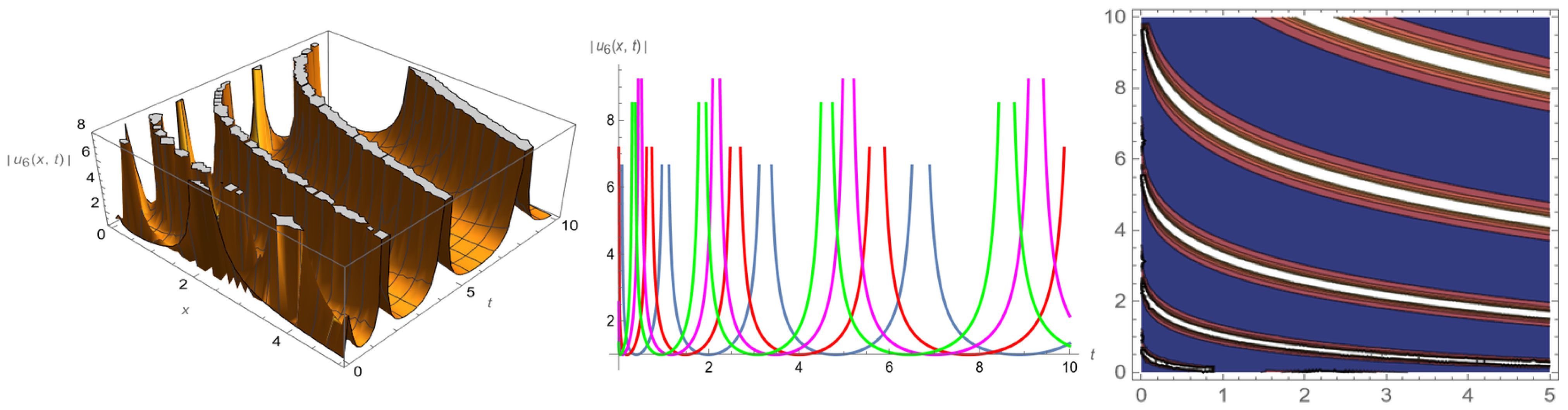
4.2. Six Exact Solutions of FSH Equation
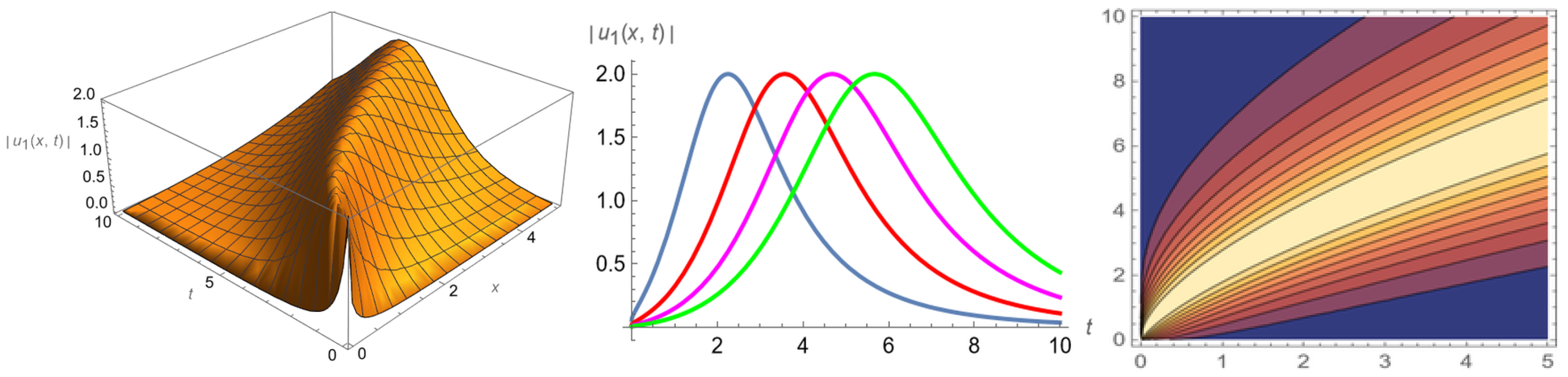
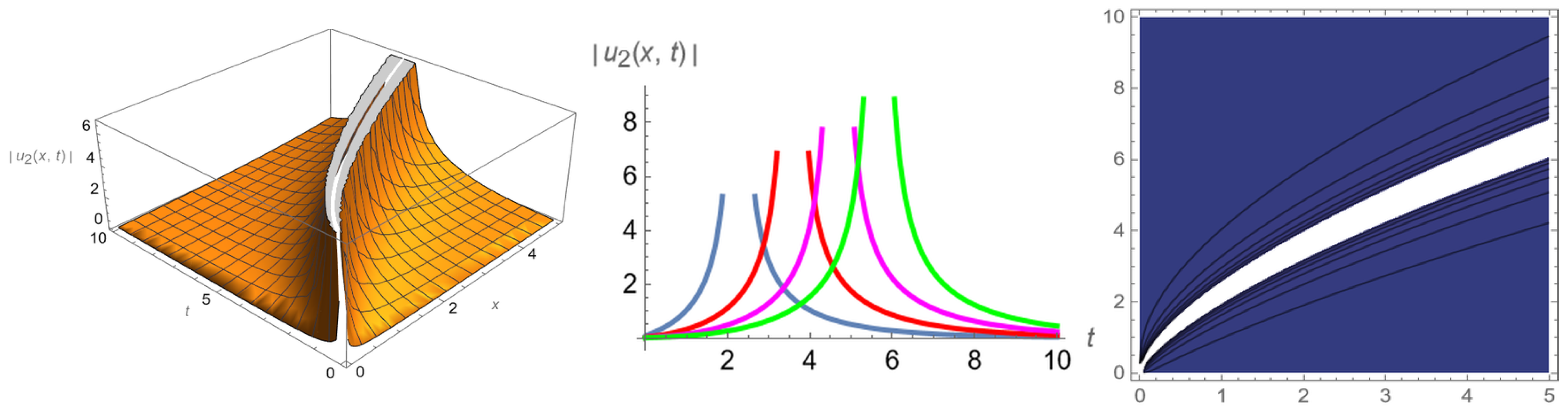
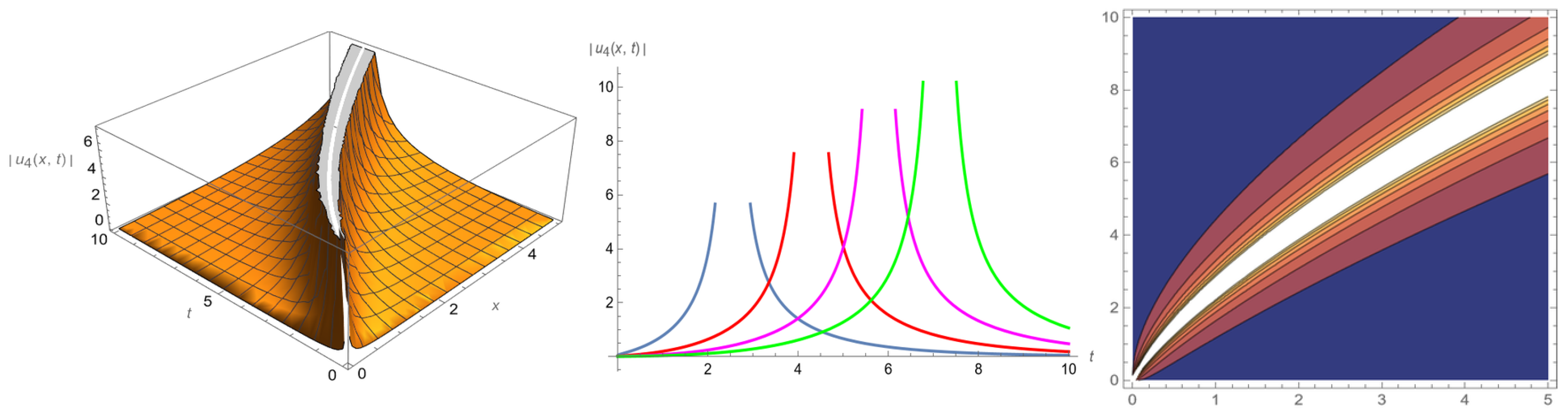
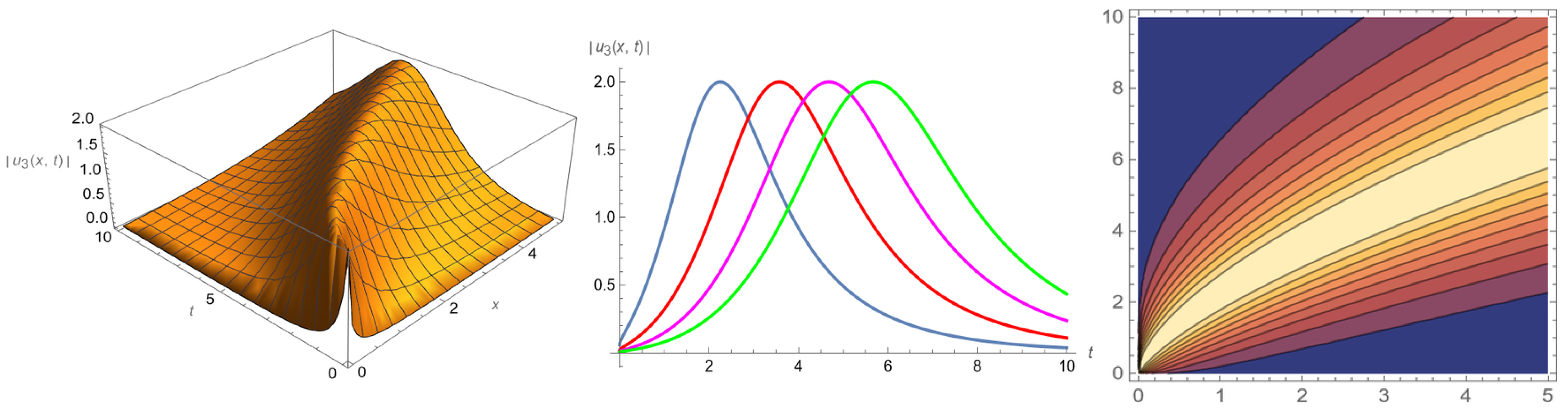
4.3. Physical and Geometry Interpretation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Ekici, M.; Mirzazadeh, M.; Sonmezoglu, A.; Ullah, M.Z.; Asma, M.; Zhou, Q.; Moshokoa, S.P.; Biswas, A.; Belic, M. Dispersive optical solitons with Schrödinger–Hirota equation by extended trial equation method. Optik 2017, 136, 451–461. [Google Scholar] [CrossRef]
- Ahmad, A.; Seadawy, A.R.; Ahmed, S.; Rizvi, S.T. Dynamical forms of breathers, rogue waves, lump and their interactions for Schrödinger–Hirota equation. Opt. Quantum Electron. 2023, 55, 730. [Google Scholar] [CrossRef]
- Radha, B.; Rossen, D. The Schrödinger equation as a moving curve. Phys. Lett. A 1999, 260, 62–67. [Google Scholar]
- Li, Y.; Abdel-Aziz, H.; Serry, H.; El-Adawy, F.; Saad, M. Geometric visualization of evolved ruled surfaces via alternative frame in Lorentz-Minkowski 3-space. AIMS Math. 2024, 9, 25619–25635. [Google Scholar] [CrossRef]
- Erdoğdu, M.; Yavuz, A. Differential geometric aspects of nonlinear Schrödinger equation. Commun. Fac. Sci. Univ. Ank. Ser. A1 Math. Stat. 2021, 70, 510–521. [Google Scholar] [CrossRef]
- Li, Y.; Erdoğdu, M.; Yavuz, A. Differential Geometric Approach of Betchow-Da Rios Soliton Equation. Hacet. J. Math. Stat. 2023, 52, 114–125. [Google Scholar] [CrossRef]
- Li, Y.; Güler, E.; Toda, M. Family of right conoid hypersurfaces with light-like axis in Minkowski four-space. AIMS Math. 2024, 9, 18732–18745. [Google Scholar] [CrossRef]
- Li, Y.; Güler, E. Right Conoids Demonstrating a Time-like Axis within Minkowski Four-Dimensional Space. Mathematics 2024, 12, 2421. [Google Scholar] [CrossRef]
- O’regan, D.; Aderyani, S.R.; Saadati, R.; Inc, M. Soliton Solution of the Nonlinear Time Fractional Equations: Comprehensive Methods to Solve Physical Models. Axioms 2024, 13, 92. [Google Scholar] [CrossRef]
- Biswas, S.; Ghosh, U.; Raut, S. Construction of fractional granular model and bright, dark, lump, breather types soliton solutions using Hirota bilinear method. Chaos Solitons Fractals 2023, 172, 113520. [Google Scholar] [CrossRef]
- Feng, Q. Jacobi Elliptic Function Solutions For Fractional Partial Differential Equations. IAENG Int. J. Appl. Math. 2016, 46, 121–129. [Google Scholar]
- Xu, B.; Shi, P.-C.; Zhang, S.-J. Non-Differentiable fractional odd-soliton solutions of local fractional generalized Broer-Kaup system by extending Darboux transformation. Therm. Sci. 2023, 27, 77–86. [Google Scholar] [CrossRef]
- Sulaiman, T.-A.; Bulut, H.; Atas, S.-S. Optical solitons to the fractional Schrödinger-Hirota equation. Appl. Math. Nonlinear Sci. 2019, 4, 535–542. [Google Scholar] [CrossRef]
- Ma, H.-C.; Yu, Y.-D.; Ge, D.-J. New exact travelling wave solutions for Zakharov–Kuznetsov equation. Commun. Theor. Phys. 2009, 51, 609. [Google Scholar]
- Sirendaoreji, N. Traveling Wave Solutions of Nonlinear Wave Equations—Theory and Applications of Auxiliary Equation Method; Science Press: Beijing, China, 2019. [Google Scholar]
- Bobenko, A.; Pinkall, U. Discrete surfaces with constant negative Gaussian curvature and the Hirota equation. J. Differ. Geom. 1996, 43, 527–611. [Google Scholar] [CrossRef]
- Li, Y.; Aquib, M.; Khan, M.A.; Al-Dayel, I.; Masood, K. Analyzing the Ricci Tensor for Slant Submanifolds in Locally Metallic Product Space Forms with a Semi-Symmetric Metric Connection. Axioms 2024, 13, 454. [Google Scholar] [CrossRef]
- Li, Y.; Aquib, M.; Khan, M.-A.; Al-Dayel, I.; Youssef, M.Z. Geometric Inequalities of Slant Submanifolds in Locally Metallic Product Space Forms. Axioms 2024, 13, 486. [Google Scholar] [CrossRef]
- Li, Y.; Gezer, A.; Karakas, E. Exploring Conformal Soliton Structures in Tangent Bundles with Ricci-Quarter Symmetric Metric Connections. Mathematics 2024, 12, 2101. [Google Scholar] [CrossRef]
- Schlag, W. Stable Manifolds for an Orbitally Unstable Nonlinear Schrödinger Equation. Ann. Math. 2009, 169, 139–227. [Google Scholar] [CrossRef]
- Khalil, R.; Al Horani, M.; Yousef, A.; Sababheh, M. A new definition of fractional derivative. J. Comput. Appl. Math. 2014, 264, 65–70. [Google Scholar] [CrossRef]
- Du, Y.-J.; Yin, T.-L.; Pang, J. The exact solutions of Schrdinger-Hirota equation based on the auxiliary equation method. Opt. Quantum Electron. 2024, 56, 712. [Google Scholar] [CrossRef]
- Sirendaoreji, N. Exact travelling wave solutions for four forms of nonlinear Klein–Gordon equations. Phys. Lett. A 2007, 363, 440–447. [Google Scholar] [CrossRef]
- Liu, S.-S.; Liu, S.-D. Nonlinear Equations in Physics; Peking University Press: Beijing, China, 2000; Volume 7, pp. 32–35. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tian, G.; Meng, X. Exact Solutions to Fractional Schrödinger–Hirota Equation Using Auxiliary Equation Method. Axioms 2024, 13, 663. https://doi.org/10.3390/axioms13100663
Tian G, Meng X. Exact Solutions to Fractional Schrödinger–Hirota Equation Using Auxiliary Equation Method. Axioms. 2024; 13(10):663. https://doi.org/10.3390/axioms13100663
Chicago/Turabian StyleTian, Guangyuan, and Xianji Meng. 2024. "Exact Solutions to Fractional Schrödinger–Hirota Equation Using Auxiliary Equation Method" Axioms 13, no. 10: 663. https://doi.org/10.3390/axioms13100663
APA StyleTian, G., & Meng, X. (2024). Exact Solutions to Fractional Schrödinger–Hirota Equation Using Auxiliary Equation Method. Axioms, 13(10), 663. https://doi.org/10.3390/axioms13100663