
An Interval Observer for a Class of Cyber–Physical Systems with Disturbance



{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
3. Main Results
3.1. Design of the IO
3.2. IO Design by Coordinates Transformation Method
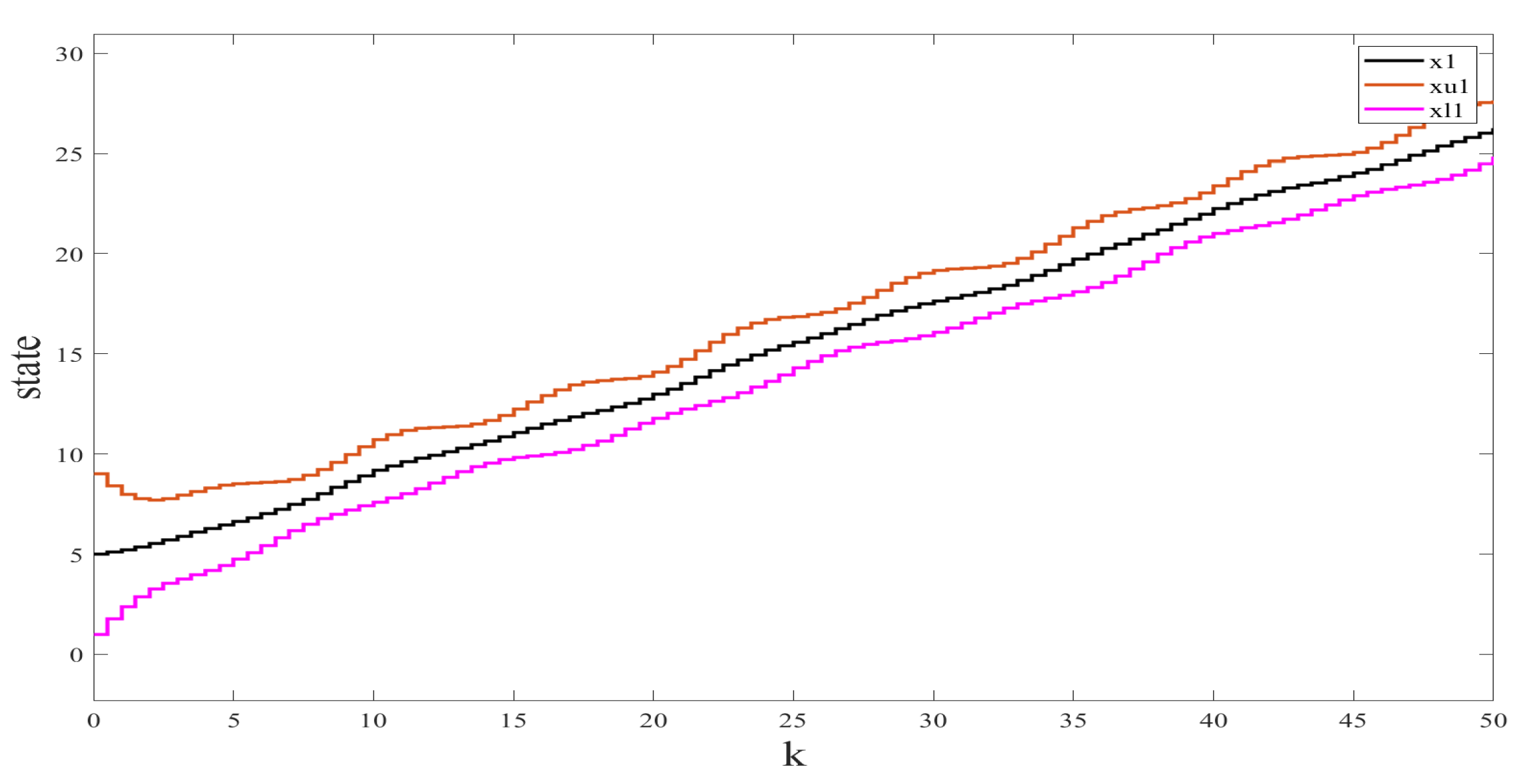
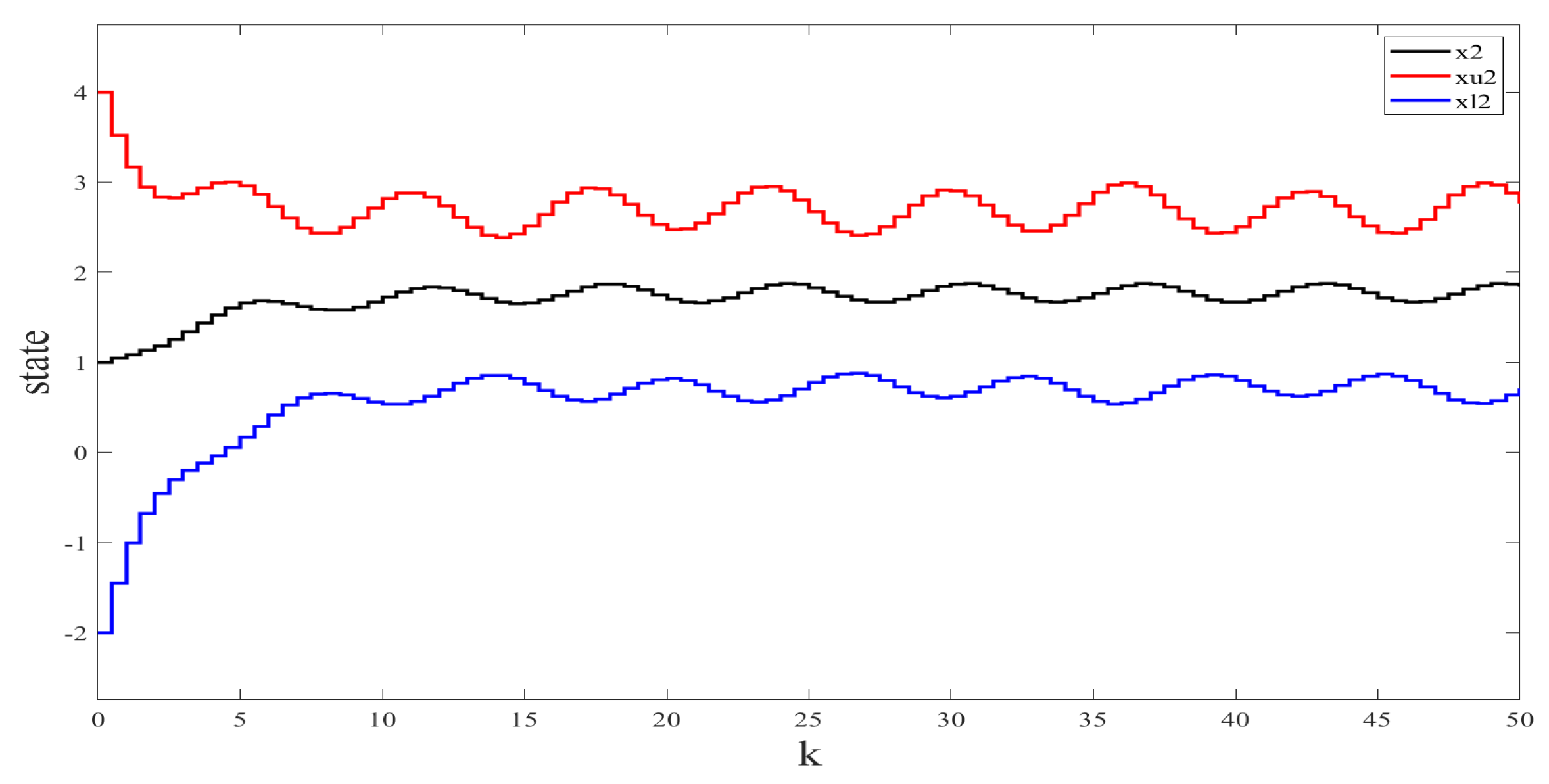
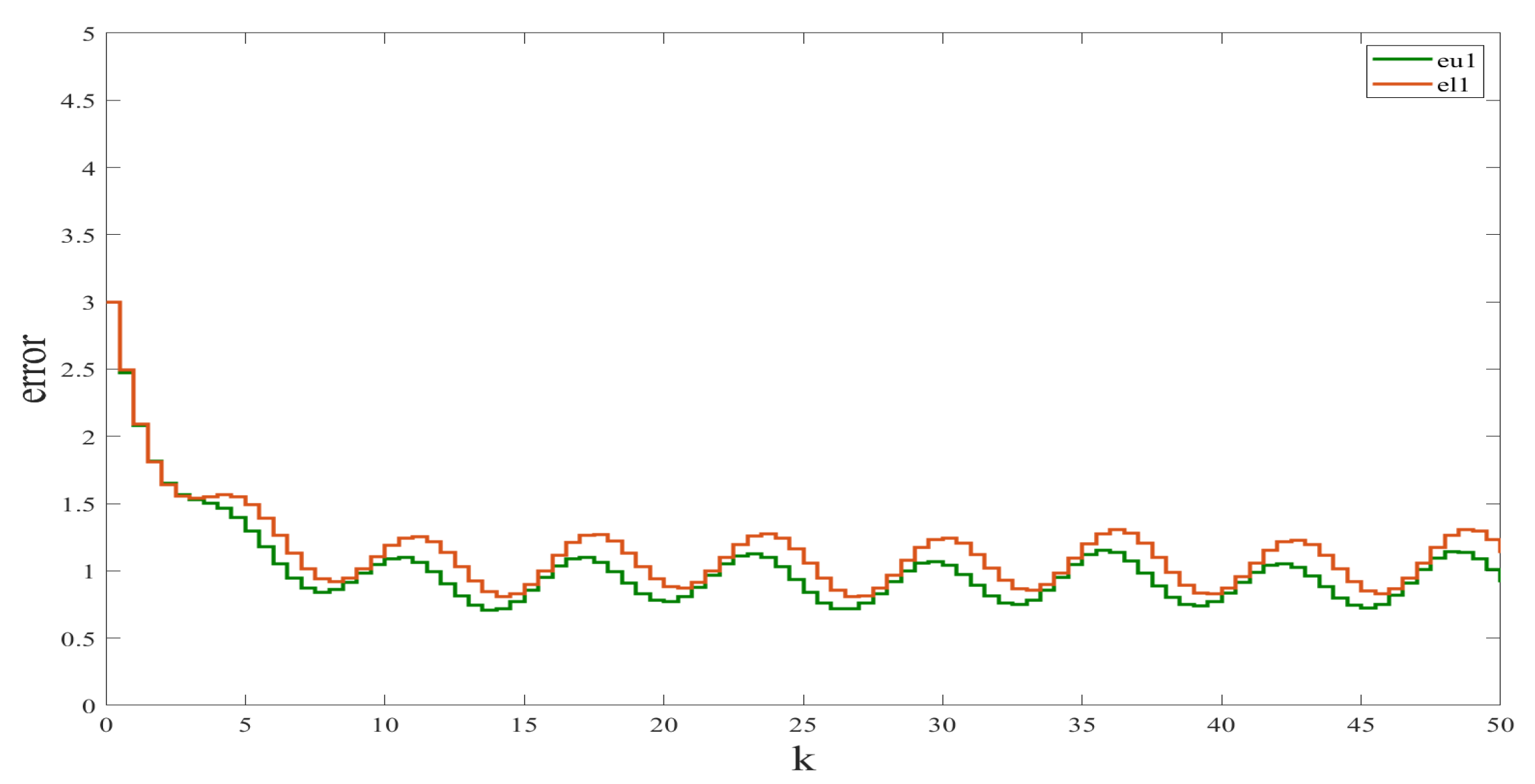
4. Simulation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gouzé, J.; Rapaport, A.; Hadj-Sadok, M. Interval observers for uncertain biological systems. Ecol. Model. 2000, 133, 45–56. [Google Scholar] [CrossRef]
- Moisan, M.; Bernard, O. Interval observers for non monotone systems.application to bioprocess models. Ifac Proc. Vol. 2005, 16, 43–48. [Google Scholar] [CrossRef]
- Moisan, M.; Bernard, O.; Gouzé, J.L. Near optimal interval observers bundle for uncertain bioreactors. Automatica 2009, 45, 291–295. [Google Scholar] [CrossRef]
- Mazenc, F.; Bernard, O. Interval observers for linear time-invariant systems with disturbances. Automatica 2011, 47, 140–147. [Google Scholar] [CrossRef]
- Raissi, T.; Efimov, D.; Zolghadri, A. Interval state estimation for a class of nonlinear systems. IEEE Trans. Autom. Control 2012, 57, 260–265. [Google Scholar] [CrossRef]
- Xiang, W.; Xiao, J.; Iqbal, M.N. Robust observer design for nonlinear uncertain switched systems under asynchronous switching. Nonlinear Anal. Hybrid Syst. 2012, 6, 754–773. [Google Scholar] [CrossRef]
- Zheng, G.; Efimov, D.; Bejarano, F.J.; Perruquetti, W.; Wang, H. Interval observer for a class of uncertain nonlinear singular systems. Automatica 2016, 71, 159–168. [Google Scholar] [CrossRef]
- Degue, K.H.; Efimov, D.; Ny, J.L. Interval observer approach to output stabilization of linear impulsive systems. IFAC-PapersOnLine 2017, 50, 5085–5090. [Google Scholar] [CrossRef]
- Chevet, T.; Dinh, T.N.; Marzat, J.; Wang, Z.; Raïssi, T. Zonotopic kalman filter-based interval estimation for discrete-time linear systems with unknown inputs. IEEE Control Syst. Lett. 2022, 6, 806–811. [Google Scholar] [CrossRef]
- Tahir, A.M.; Açıkmeşe, B. Synthesis of interval observers for bounded jacobian nonlinear discrete-time systems. IEEE Control Syst. Lett. 2022, 6, 764–769. [Google Scholar] [CrossRef]
- Yin, Z.; Huang, J.; Dinh, T.N. Design of distributed interval observers for multiple Euler–lagrange systems. Mathematics 2023, 11, 1872. [Google Scholar] [CrossRef]
- Wang, Z.; Yin, H.; Dinh, T.N.; Raïssi, T. Interval estimation based on the reduced-order observer and peak-to-peak analysis. Int. J. Control 2022, 95, 2876–2884. [Google Scholar] [CrossRef]
- Zhang, H.; Huang, J.; He, S. Fractional-order interval observer for multiagent nonlinear systems. Fractal Fract. 2022, 6, 355. [Google Scholar] [CrossRef]
- Yin, Z.; Huang, J.; Zhang, Y. Event-triggered interval observer design for a class of Euler-lagrange systems with disturbances. Trans. Inst. Meas. Control 2023. [Google Scholar] [CrossRef]
- Cao, X.; Cheng, P.; Chen, J.; Sun, Y. An online optimization approach for control and communication codesign in networked Cyber-physical systems. IEEE Trans. Ind. Inform. 2013, 9, 439–450. [Google Scholar] [CrossRef]
- Lu, A.Y.; Yang, G.H. Secure state estimation for Cyber-physical systems under sparse sensor attacks via a switched Luenberger observer. Inf. Sci. 2017, 417, 454–464. [Google Scholar] [CrossRef]
- Xie, C.H.; Yang, G. Secure estimation for Cyber-physical systems with adversarial attacks and unknown inputs: An L2-gain method. Int. J. Robust Nonlinear Control 2018, 28, 2131–2143. [Google Scholar] [CrossRef]
- Yang, Y.; Li, Y.; Yue, D.; Tian, Y.C.; Ding, X. Distributed secure consensus control with event-triggering for multiagent systems under doS attacks. IEEE Trans. Cybern. 2021, 51, 2916–2928. [Google Scholar] [CrossRef]
- Chen, N.; Geng, S.; Li, Y. Modeling and verification of uncertain Cyber-physical system based on decision processes. Mathematics 2023, 11, 4122. [Google Scholar] [CrossRef]
- Labed, A.; Saadaoui, I.; E, H.; El-Meligy, M.A.; Li, Z.; Sharaf, M. Language recovery in discrete-event systems against sensor deception attacks. Mathematics 2023, 11, 2313. [Google Scholar] [CrossRef]
- Moisan, M.; Bernard, O. Robust interval observers for global Lipschitz uncertain chaotic systems. Syst. Control Lett. 2010, 59, 687–694. [Google Scholar] [CrossRef]
- Efimov, D.; Raïssi, T.; Zolghadri, A. Control of nonlinear and LPV systems: Interval observer-based framework. IEEE Trans. Autom. Control 2013, 58, 773–778. [Google Scholar] [CrossRef]
- Guo, S.; Zhu, F. Interval observer design for discrete-time switched system. IFAC-PapersOnLine 2017, 50, 5073–5078. [Google Scholar] [CrossRef]
- Huang, J.; Fan, J.; Dinh, T.N.; Zhao, X.; Zhang, Y. Event-triggered interval estimation method for Cyber-physical systems with unknown inputs. Isa Trans. 2022, 135, 1–12. [Google Scholar] [CrossRef]
- Shoukry, Y.; Nuzzo, P.; Puggelli, A.; Sangiovanni-Vincentelli, A.L.; Seshia, S.A.; Tabuada, P. Secure state estimation for Cyber-physical systems under sensor attacks: A satisfiability modulo theory approach. IEEE Trans. Autom. Control 2017, 62, 4917–4932. [Google Scholar] [CrossRef]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Qin, Y.; Huang, J.; Wu, H. An Interval Observer for a Class of Cyber–Physical Systems with Disturbance. Axioms 2024, 13, 18. https://doi.org/10.3390/axioms13010018
Qin Y, Huang J, Wu H. An Interval Observer for a Class of Cyber–Physical Systems with Disturbance. Axioms. 2024; 13(1):18. https://doi.org/10.3390/axioms13010018
Chicago/Turabian StyleQin, Yong, Jun Huang, and Hongrun Wu. 2024. "An Interval Observer for a Class of Cyber–Physical Systems with Disturbance" Axioms 13, no. 1: 18. https://doi.org/10.3390/axioms13010018
APA StyleQin, Y., Huang, J., & Wu, H. (2024). An Interval Observer for a Class of Cyber–Physical Systems with Disturbance. Axioms, 13(1), 18. https://doi.org/10.3390/axioms13010018