Using fractals to study the stability of iterative method is to study the complex dynamic behavior of the iterative method. The complex dynamic behavior refers to the related properties of the rational operator related to the iterative method under the Möbius conjugate map on the Riemann sphere. From a numerical point of view, the study of the dynamic properties of rational operators allows us to draw important conclusions about the stability and reliability of fixed points and critical points. From the perspective of parameter selection, by researching the parameter spaces of the method constructed from the critical points, the performance of different members can be understood, which is conducive to the selection of parameters. The dynamic planes show the stability of these special methods, and we obtain the elements of the most-stable parameter members.
Next, the complex dynamics of the
family described in (
3) were explored. To start with, rational operators linked to
were constructed on nonlinear polynomials. On this basis, the stability of the corresponding fixed point and critical point was studied. Furthermore, the parameter spaces starting from the free critical points were constructed. Finally, the relevant dynamical planes were analyzed, and the influence of the parameter selection on stability is discussed.
2.2. Fixed Points and Critical Points
Here, we analyzed the fixed points and stability of
. Firstly, it can be obtained from (
4):
where
.
Proposition 2. For and , there are the following conclusions:
When , and have common factors .
When , has a factor .
When , has a factor .
Proof. By solving the equations and simultaneously, we have the following:
When , and have common factors . At this point, and .
Bring into and , respectively. We obtain: and . As a consequence, has a factor when and has a factor when . □
Proposition 3. The fixed points of are , and the following strange fixed points:
(when ) and , which correspond to the 18 roots of polynomial where .
Choose different λ-values; the number of fixed points is also different:
has 21 fixed points when and .
has 20 fixed points excluding when .
has 15 fixed points when .
has 21 fixed points, and is a triple root when .
The strange fixed points of satisfy for ; each pair is conjugate to each other, being and , and , and , and , and , and , and , and , and and .
Proof. When
,
, and
where
and
.
where
and
. □
According to the above proposition, we determined that there are a maximum of 21 and a minimum of 15 fixed points, where 0, ∞ correspond to and (when ) corresponds to the divergence of the original method.
Proposition 4. For the stability of , , verify:
- (1)
is a repulsive point when , that is ;
- (2)
is an attractive point when , that is ;
- (3)
is a parabolic point when , that is ;
- (4)
is never a superattracting point because .
Proof. By (
4), we easily obtain
where
.
Substituting
into (
11), we acquire
It is easy to obtain
. Let
, then the following formula holds:
□
Obviously, no matter what the
-value is, 0 and
∞ are superattracting fixed points, while the stability of other fixed points varies with
.
Table 1 summarizes the stability results of strange fixed points
corresponding to the special
-values related to Proposition 2.
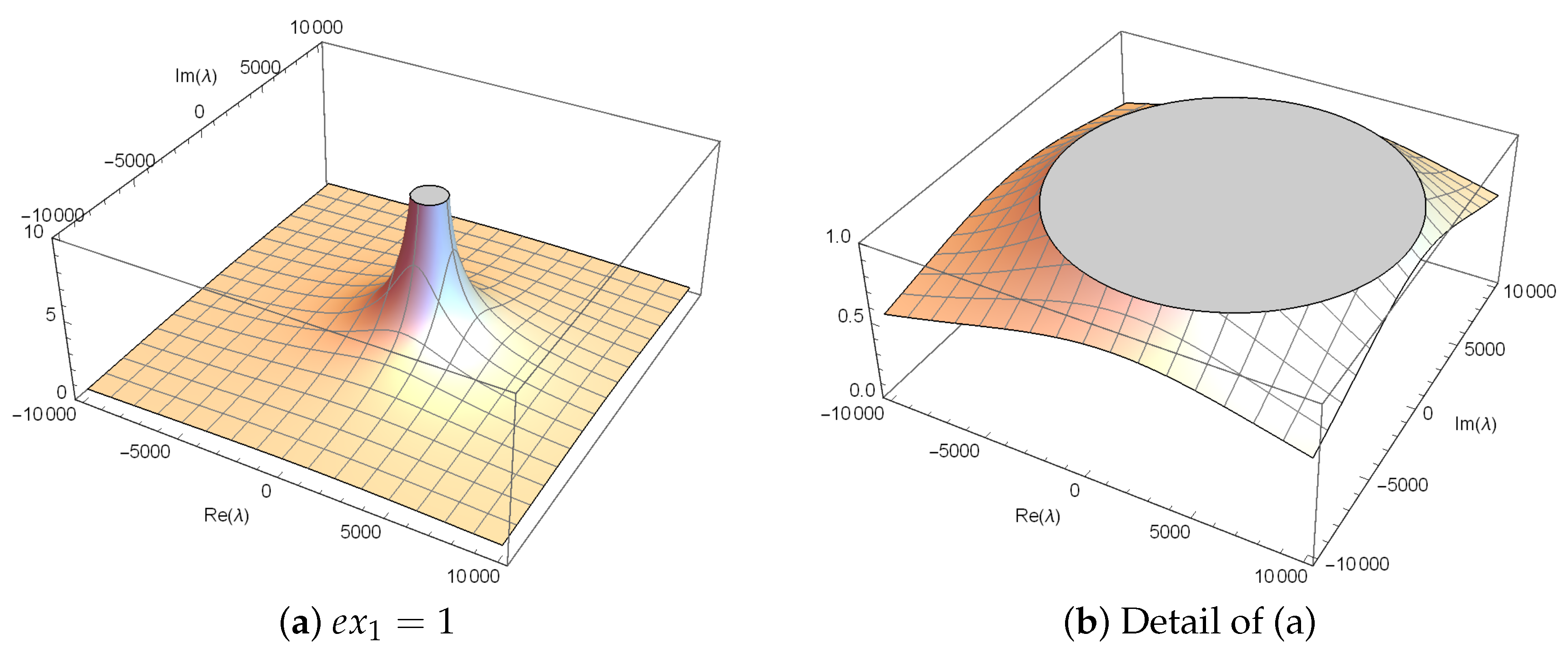
Figure 1 shows the stability surface of
. In
Figure 1b, the gray surface represents the repulsion area, while the gold surface represents the attraction area. The attraction area is significantly smaller than the exclusion area. For the
-values inside the disk,
is a repulsion, while for the
-values outside the disk,
is an attractor. We are always interested in values within the disk.
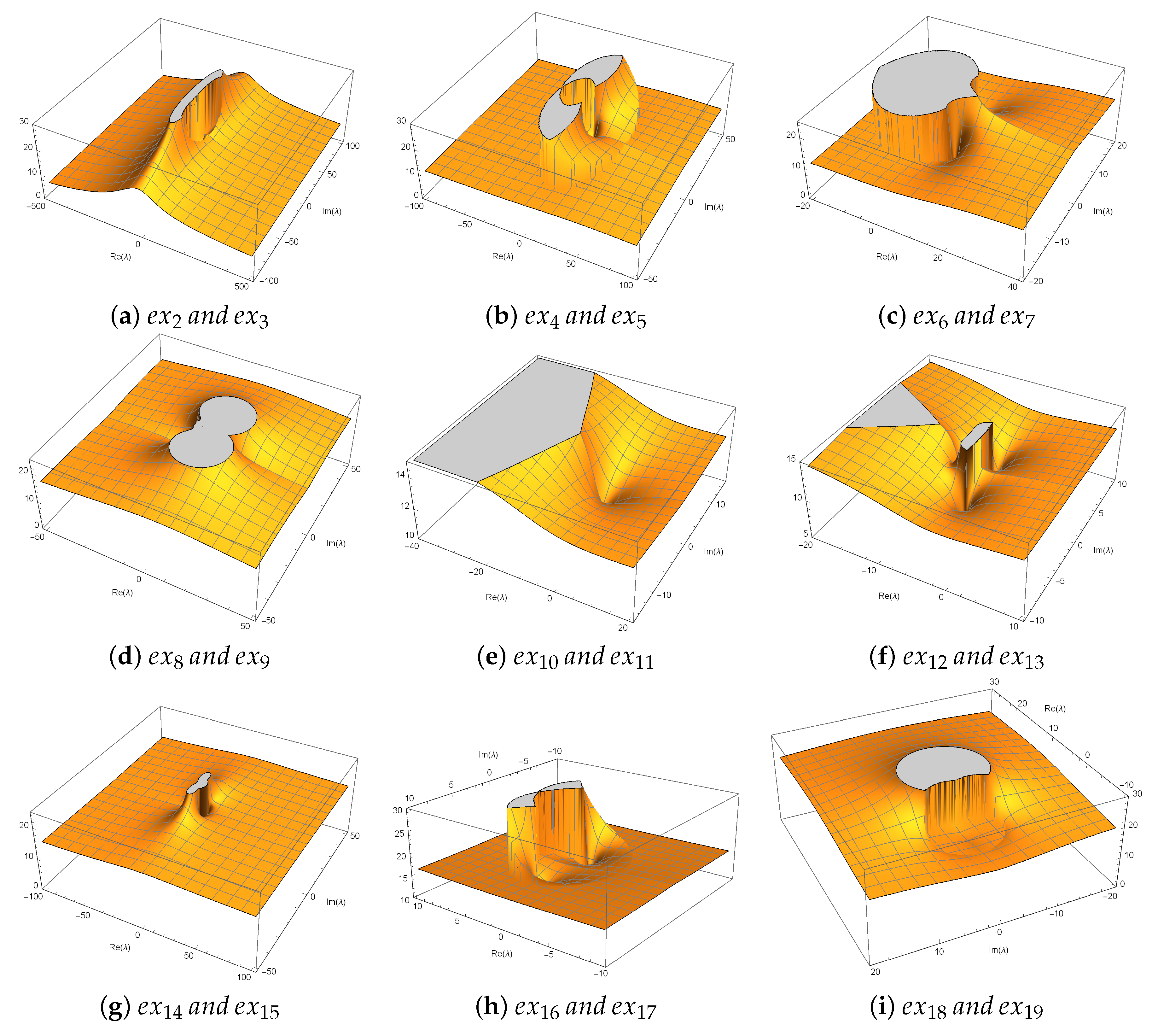
According to Proposition 2, the stability of each pair of conjugate strange fixed points’ representations is the same, so the study of their stability can be reduced from eighteen strange fixed points to nine pairs of strange fixed points.
Figure 2 shows the stability surfaces of these nine pairs of strange fixed points. The value of
determines whether these fixed points attract or not. It can be seen from
Figure 2 that there are few points that converge to the strange fixed points.
According to (
11), the critical points of
can be obtained.
Proposition 5. According to the definition of the critical points, the critical points of are the roots of , that is to say the process of finding the critical points of is to solve . That is, , , and the following free critical points:
;
;
;
;
;
;
;
;
;
;
;
where:
,
;
;
;
;
;
;
;
;
;
.
Choose different λ-values; the number of critical points is also different:
has 13 critical points, when and ;
has 7 critical points, when ;
has 11 critical points, when ;
The free critical points of satisfy for ; each pair is conjugate to each other, being and , and , and , and , and and .
Proof. From (
11), let
:
where
.
From (
12), the free critical points of
are
and the eight roots of polynomial
. Next is the process of solving the expression of the roots of the polynomial
.
First, we can express
as the product of four quadratic polynomials
. We have the following formulas:
Next, by the corresponding coefficients are equal, we can obtain
By eliminating
, and
, we can obtain a quartic polynomial about
:
After that, the specific expression of
can be obtained by (
15). Finally, by taking
into (
13), we can obtain the specific expression of the roots of
, that is
.
Additionally,
where
.
where
. □
Table 2 shows the number of free critical points corresponding to
, where
is given a particular value. According to the above proposition, 0 and
∞ correspond to the roots of
, and the number of free critical points of
is at most 11 and at least 5. Since the free critical points
,
, and
are the pre-images of the strange fixed point
, the stability of
,
, and
corresponds to the stability of
. In addition, as with the strange fixed point in this section, each pair of conjugate free critical points has the same stability properties, so we only need to study the dynamics of half of the free critical points, which will be discussed in
Section 2.3.
2.3. Parameter Spaces and Dynamical Planes
The dynamic behavior of the rational operator
(
4) varies with the parameter selection. In this section, we discuss the progressive behavior of the free critical points of
through parameter spaces. At first, the parameter space is represented by a
grid on the complex plane, and the points on the grid correspond to different
-values. The parameter space shows the convergence analysis of the
-related iterative method (
3), where the free critical points
in Proposition 5 is used as the initial estimate value and the maximum number of iterations is 25. If it converges to 0, it is expressed as orange. If it converges to
∞, it is expressed as faint yellow, and other cases are expressed as black.
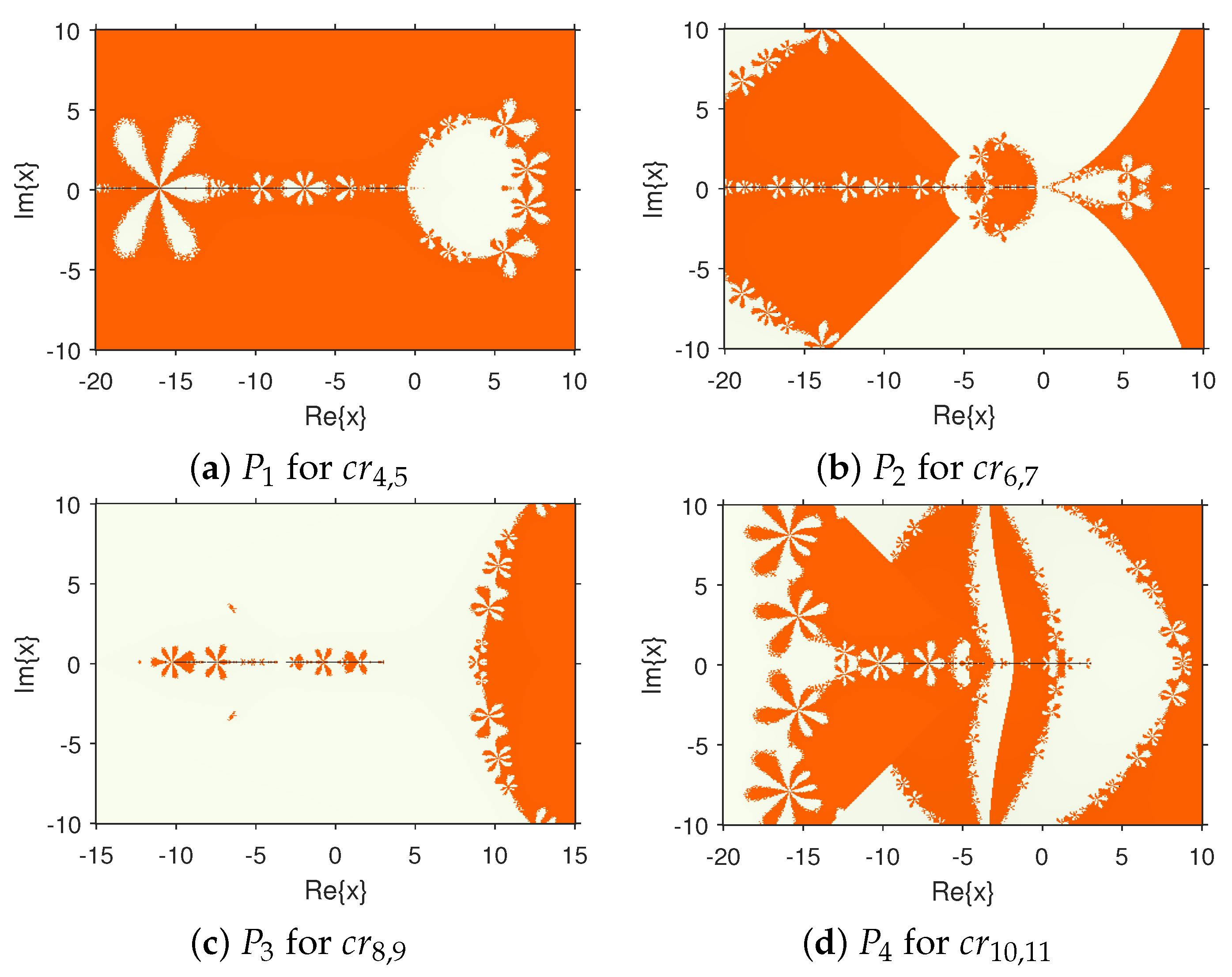
Our goal was to find a relatively stable region in the parameter space, that is the orange and faint yellow regions, because the -values in these regions are the best parameter members in terms of numerical stability.
The
family has a maximum of eleven free critical points. Proposition 5 states that it is sufficient to study four different parameter spaces. These parameter spaces are called
,
,
, and
, as described in
Figure 3. Among them, the large area of
Figure 3 is orange and faint yellow, that is, in most cases, it converges to the roots. However, by carefully observing the details of the parameter spaces, we can see that the rare black area near the imaginary part of the parameter
is 0. For example, the points corresponding to
,
,
, and
in
–
are in the black regions. Combining
Figure 1 and
Figure 2, we know that only a quite small part of the points in the iterative method (
3) converge to the strange fixed points, which corresponds to the results shown in
–
, indicating that the members in
are numerically stable.
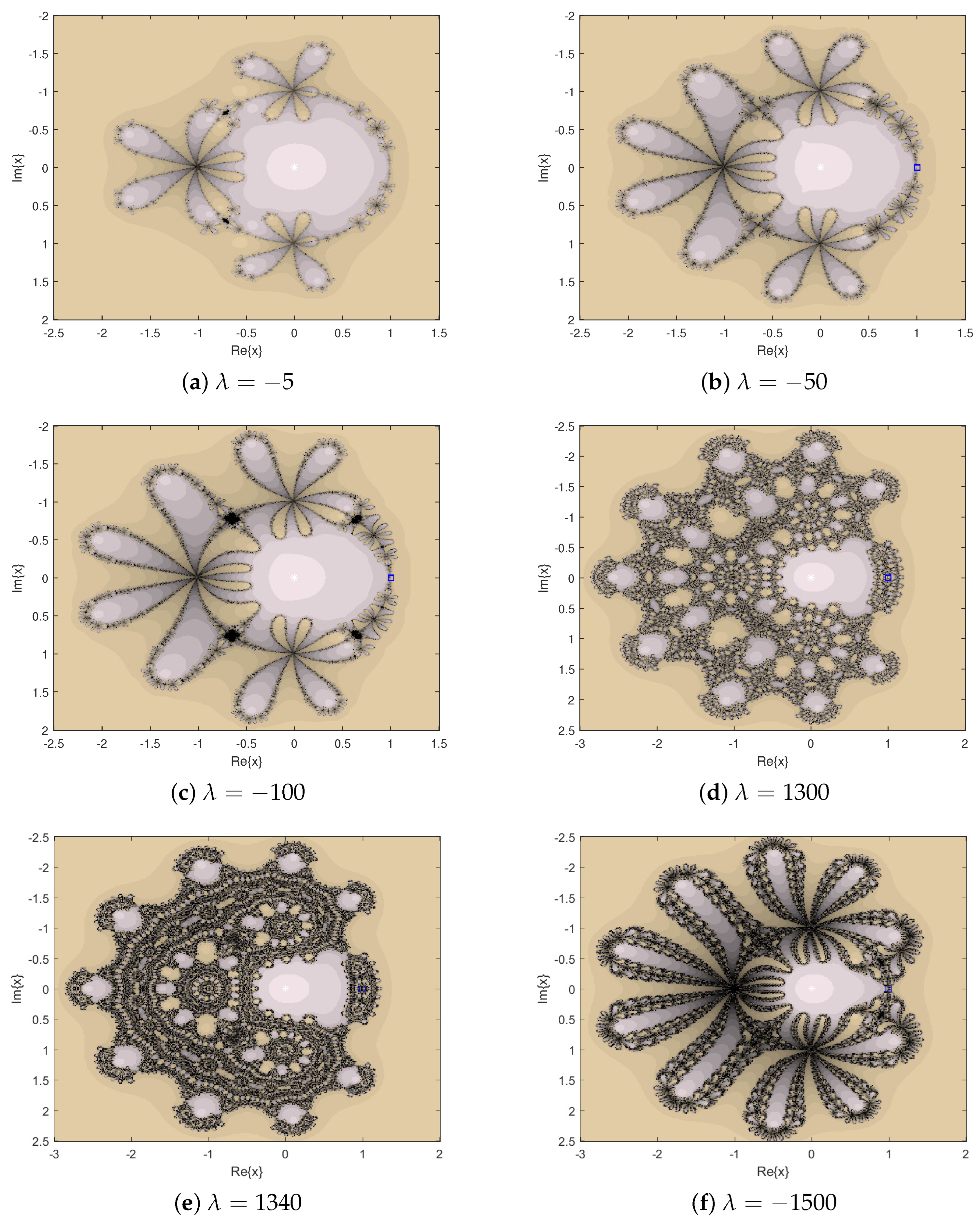
Then, we explored the stability of the corresponding iterative method by selecting various parameter values to generate a dynamical plane.
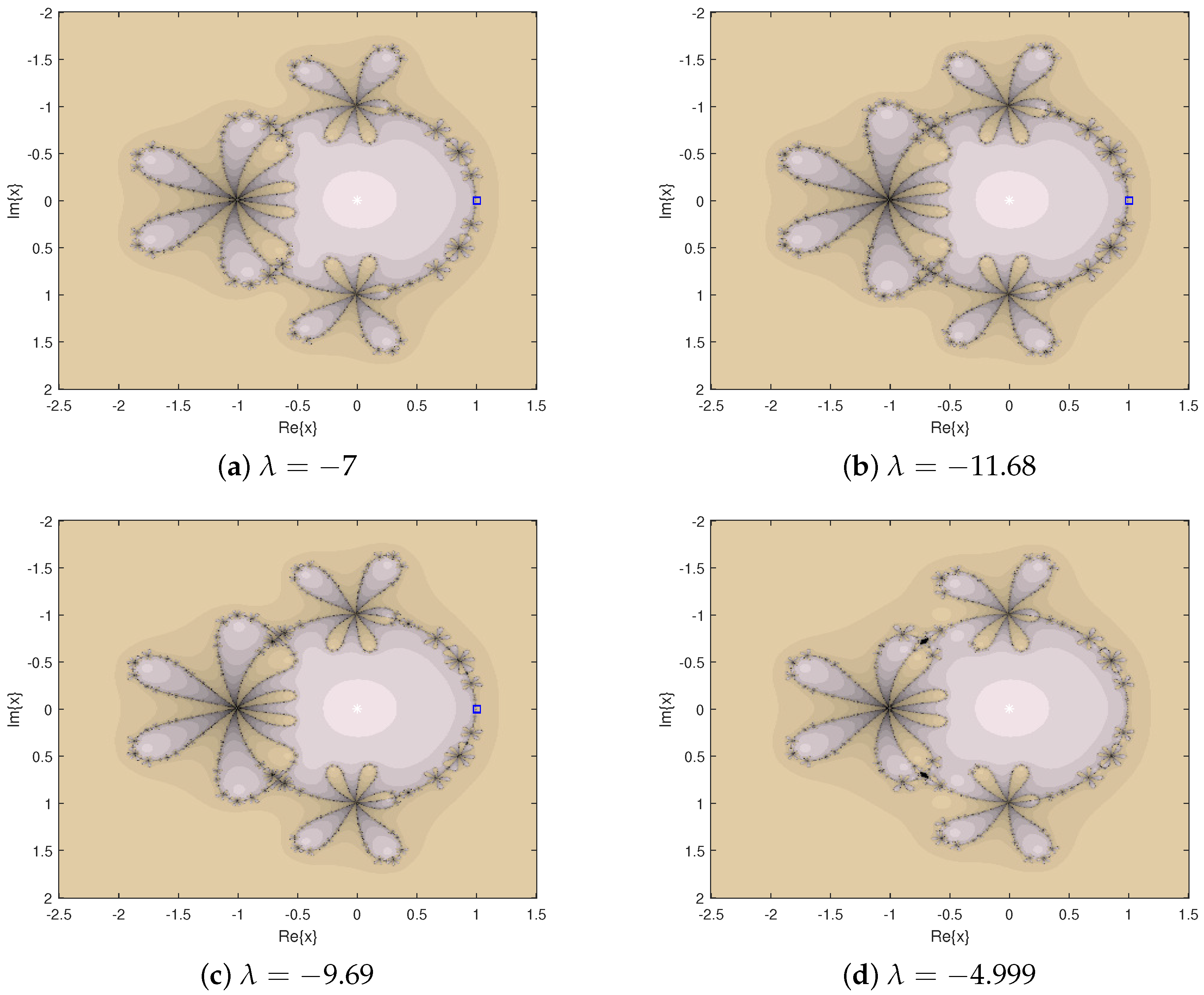
Firstly, a grid generated by points is defined on the complex plane, where each point on the grid corresponds to a different value of the initial estimate . Its graphical representation indicates that this method has a maximum of 25 iterations to any root starting from . Among them, the white asterisk “∗” represents the attractive point. Fixed points are illustrated with a red circle “∘”. Periodic points are represented as blue squares “⋄”. In addition, we represent the orbit of a periodic point in blue and the orbit of a fixed point in red.
Figure 4,
Figure 5,
Figure 6 and
Figure 7 show the dynamical planes of
corresponding to a given
value. Different colors represent different basins of attraction: gray represents convergence to 0, khaki convergence to
∞, green convergence to fixed point
, and black non-convergence.
Next, the stability of some
was studied by generating a dynamical plane. We discuss the choice of parameter
in four parts. In the first part, we chose the parameter values in the black regions of the parameter spaces, that is
; see
Figure 4.
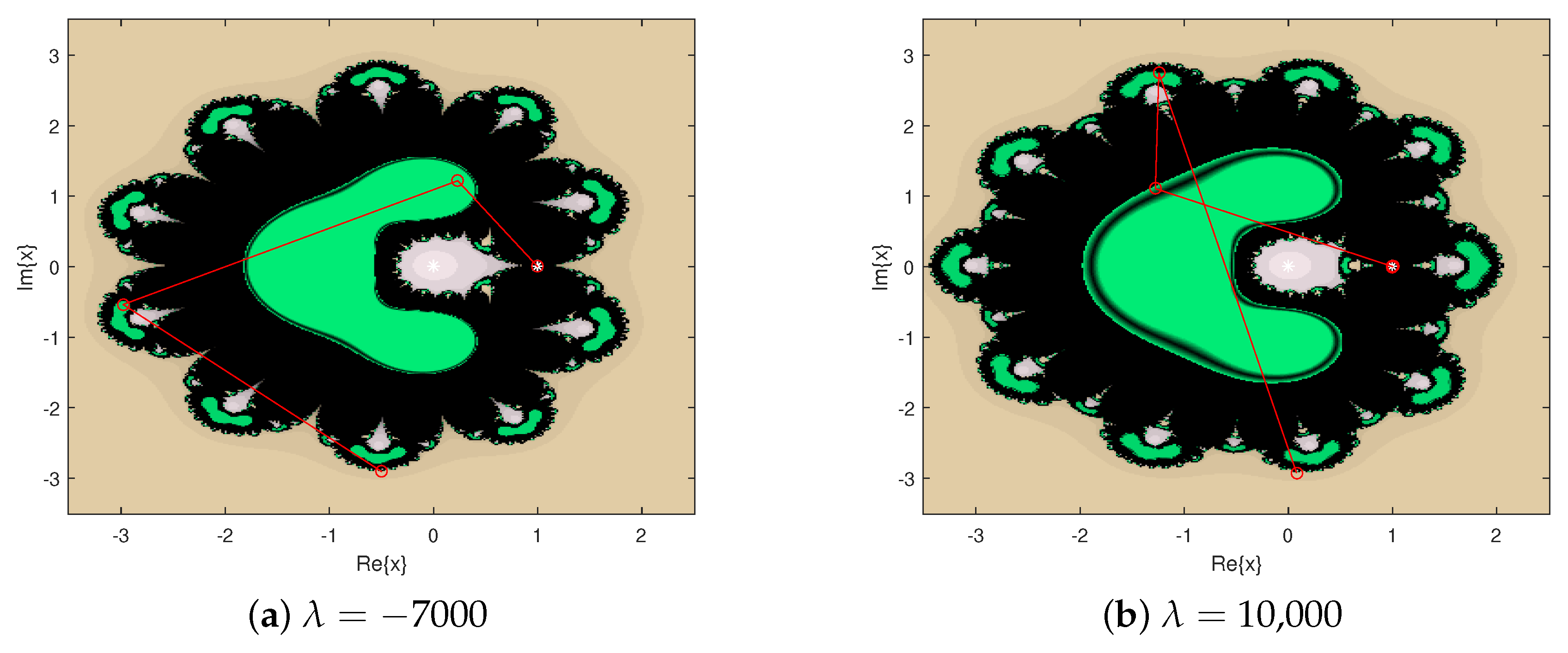
In the second part, we selected the parameter values that satisfy
, which is divided into two parts: one is the smaller value,
, and the other part is the larger value,
. At this time,
is the attractive point, which corresponds to the conclusion of Proposition 4
; see
Figure 5.
In the third part, we drew
10,000, which correspond to the conclusion of the proposition in
Figure 4a; see
Figure 6.
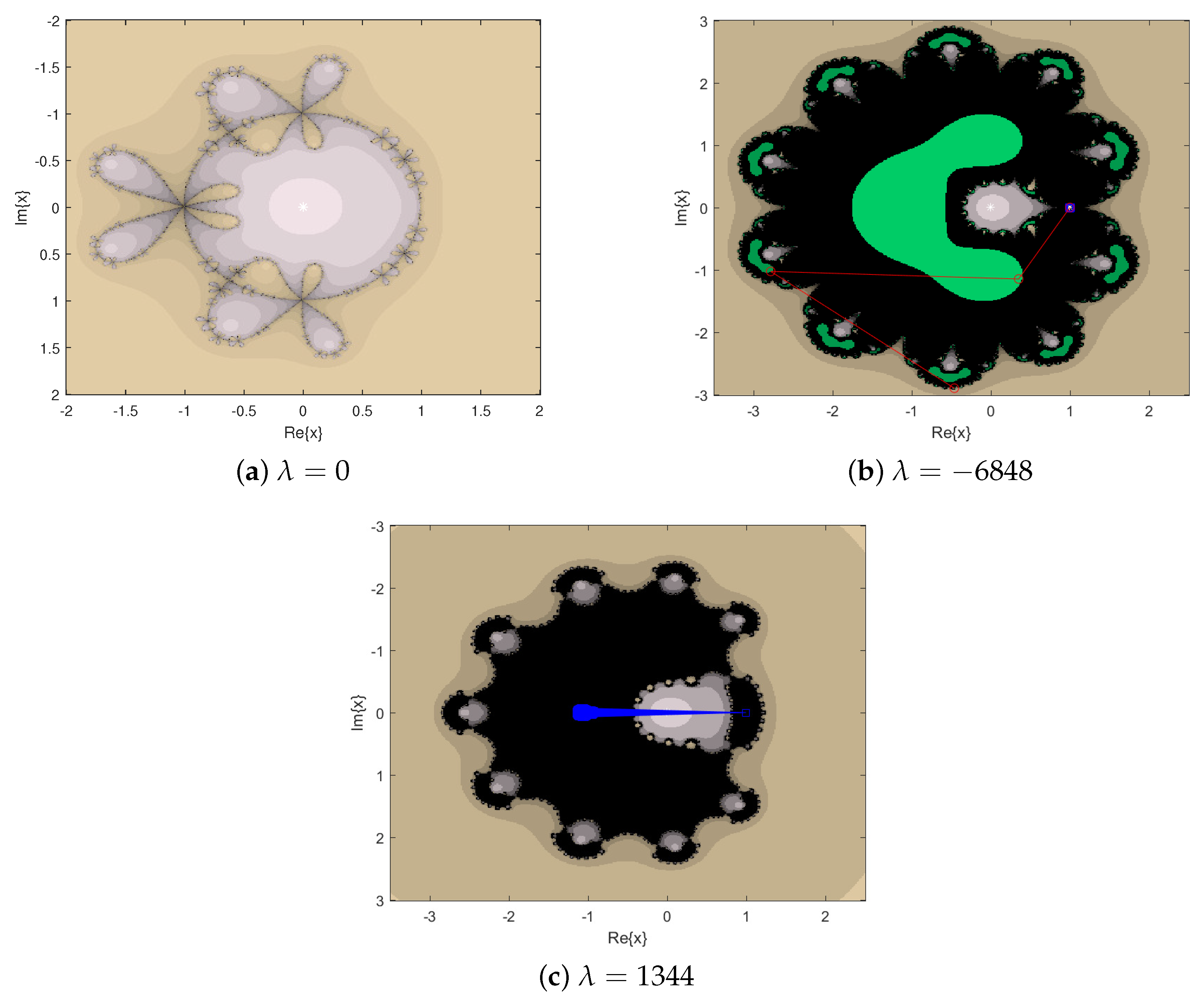
Finally, we drew the dynamical plane of
, where
are the special values obtained in Proposition 2; see
Figure 7.
In
Figure 4,
Figure 5,
Figure 6 and
Figure 7, the dynamical planes of most parameters converge to 0 and
∞, but there are also parameter values that make the iterative method not converge, such as the parameter
in
Figure 4 and
in
Figure 5. Note from
Figure 6 that the iterative method corresponding to the parameters satisfying
converges to two extra fixed points in addition to
. This indicates that the iterative method corresponding to these parameters is unstable. What we want to study more is stable parameters, that is the dynamical planes only show gray and khaki.
Comparing
Figure 4,
Figure 5, and
Figure 7, we can see that the larger the absolute value of the parameter values, the more complex the dynamical plane displayed. Carefully observing the black area in
Figure 4d and
Figure 5a,c, we can also observe that the larger the absolute value of the parameter values, the larger the black area is. In summary, the iterative method corresponding to
is more stable.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}