1. Introduction
Irregular behavior associated with analog electronic systems is caused by serious problems that have been intensively studied by engineers and researchers in the last three decades. From the viewpoint of typical properties, long-term unpredictability, broad-band frequency spectrum, and dense strange attractors are the fundamental fingerprints of chaos. Once upon a time, this kind of repeatable dynamical motion was misinterpreted as phase noise, because similar apparent properties are observed in the time and frequency domains. From the application point of view, chaotic tangles have been reported during the analysis of seemingly linear analog and digital [
1] frequency filters, phase-locked loops [
2], amplifiers working under different operational regimes [
3], power converters [
4], switched capacitor circuits [
5], modulators and demodulators, mixers, very simple multi-state static memory cells [
6], logic gates [
7], random number generators [
8], and many others. This very short and surely incomplete list implies that both autonomous and driven dynamical systems are subject to chaotic behavior; only the presence of at least one nonlinearity is mandatory.
Since the practical designs of sinusoidal oscillators require a mechanism for amplitude stabilization, these common building blocks should be treated as nonlinear. Therefore, the existence of chaos within circuit models as well as practical realizations is not a surprise. The chaotic motion is often excited by the unstable fixed points, i.e., generated strange orbits, which are members of the so-called self-exited attractors. Because of the simultaneous acting exponential divergency of state space neighboring orbits and the attractor boundedness within a finite state space volume, the minimum number of working accumulation elements is three, regardless of the combination of circuit elements. The famous Colpitts oscillator probably represents the oldest topology where chaos has been confirmed, both numerically and experimentally [
9]. This kind of circuit modified to operate in the higher frequency band is addressed in paper [
10]. It is shown that the parasitic base-emitter capacitance of a bipolar transistor should be a working accumulation element as well. The basic circuit structure of Hartley oscillators and chaos evolution are discussed in the framework of papers [
11,
12]. For nonlinear sinusoidal oscillators that have four accumulation elements, both chaos and hyperchaos represent a possible time-domain solution, as mentioned in work [
13]. Also, RC feedback oscillators have been studied with respect to the generation of robust chaotic waveforms. The existence of such steady states has been observed in Wien bridge-based feedback [
14], phase shift type of feedback loop [
15], and atypical but very simple feedback, as suggested in paper [
16]. Interesting lumped chaotic oscillators having one or two transistors and packs of surrounding passive components can be found in research paper [
17]. There, authors use a heuristic approach to develop many canonical circuits with experimentally measurable, structurally stable, chaotic self-oscillations. It is shown that the natural nonlinear features of used transistors can perform folding and stretching of vector field quite easily.
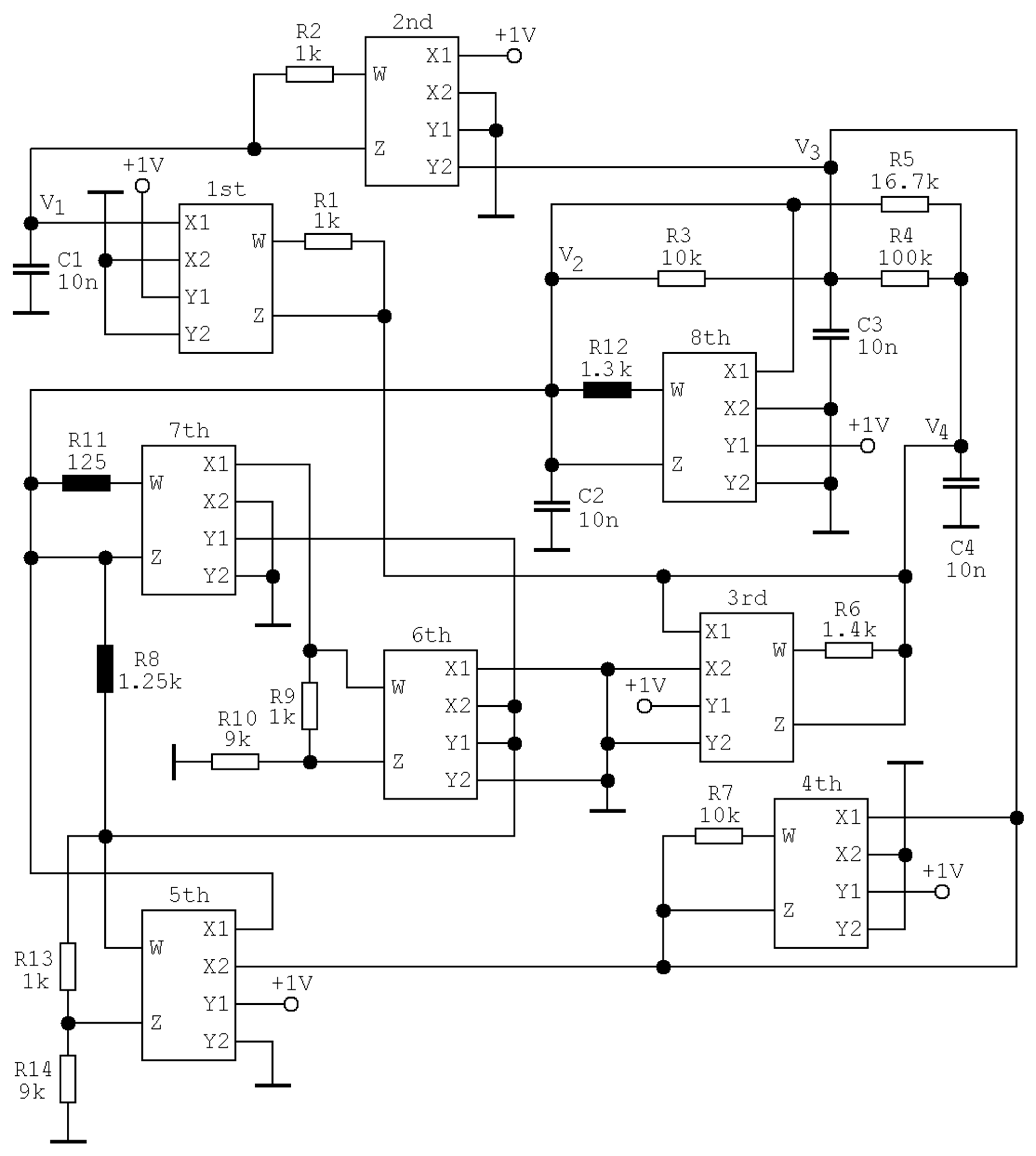
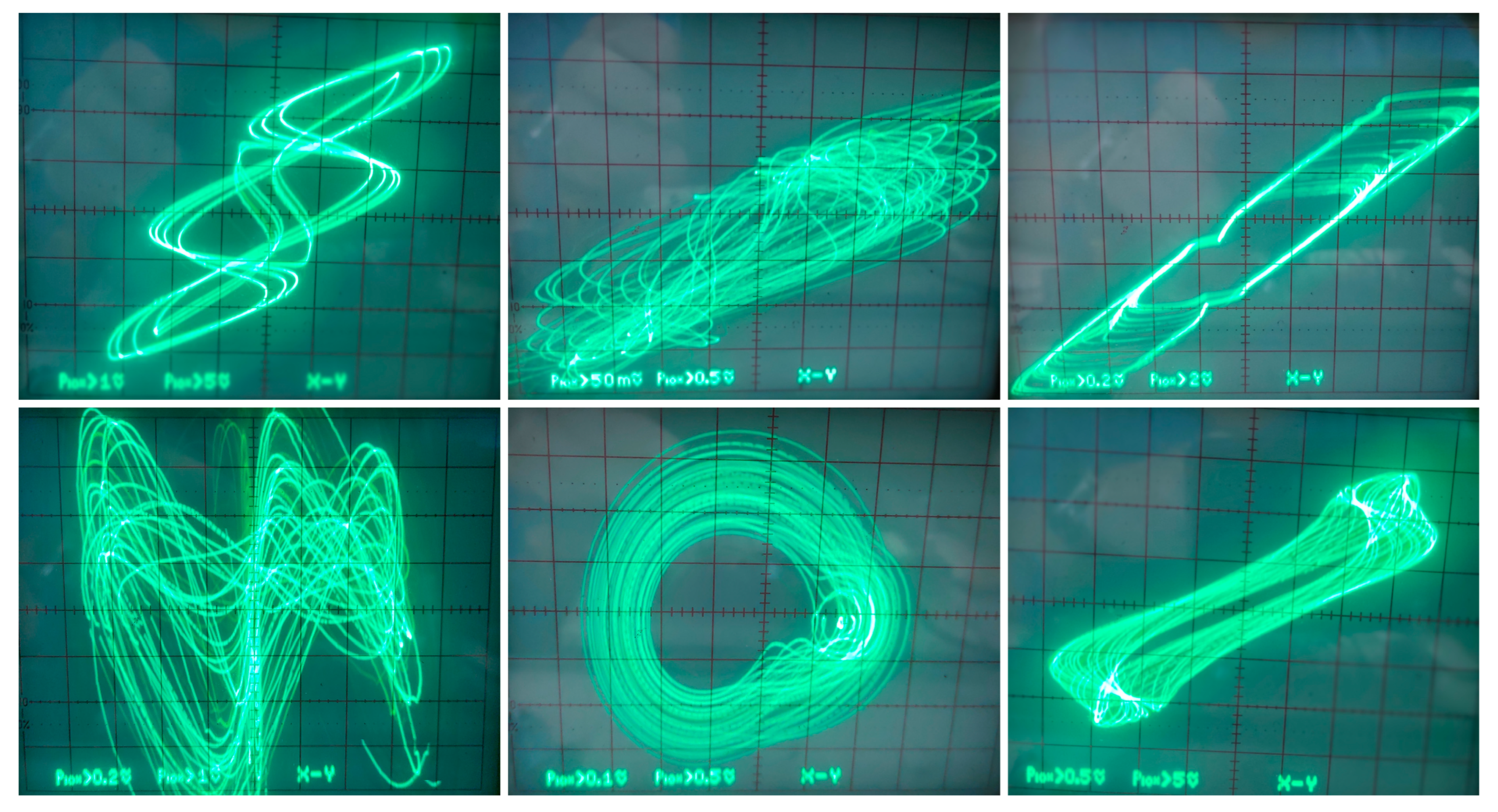
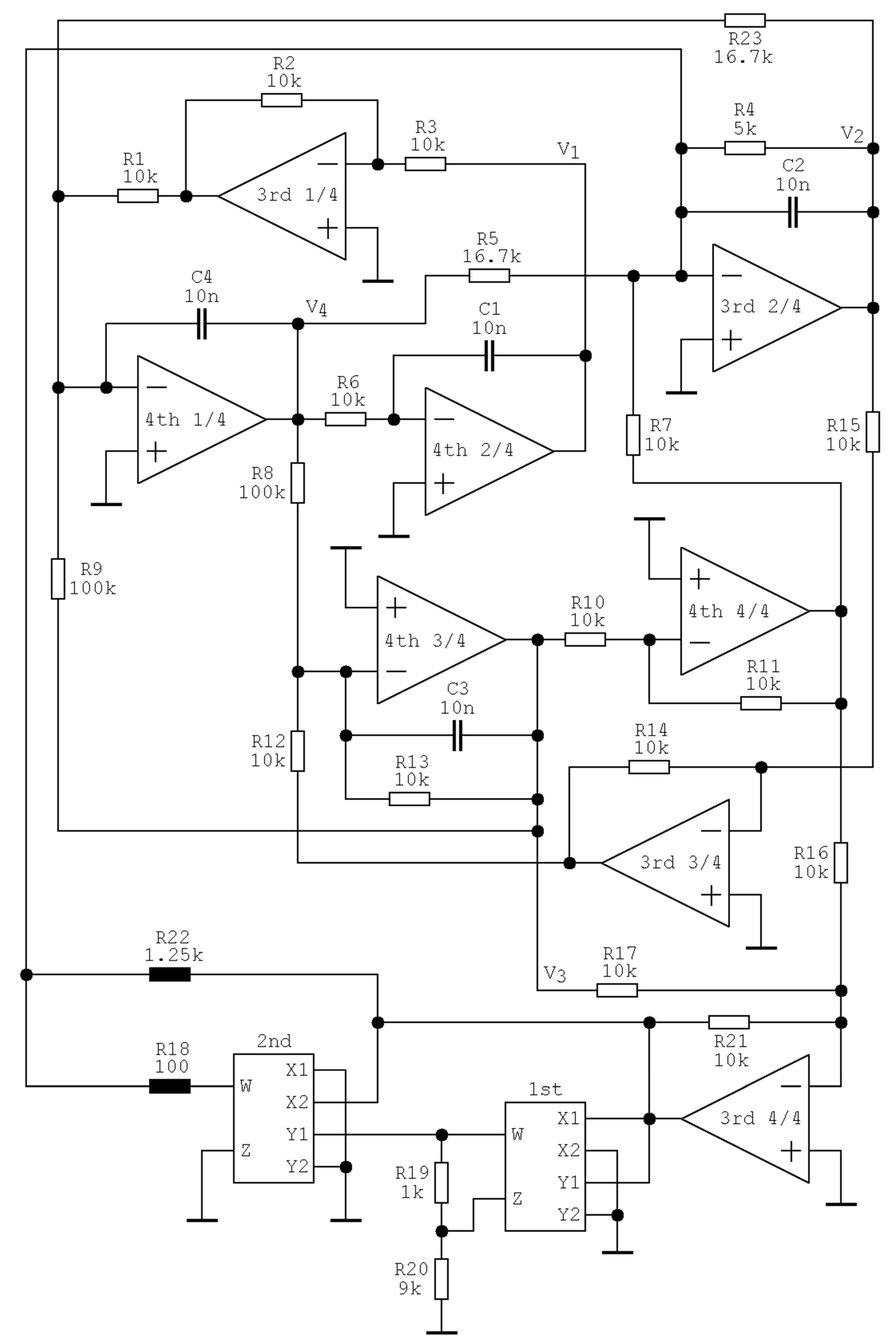
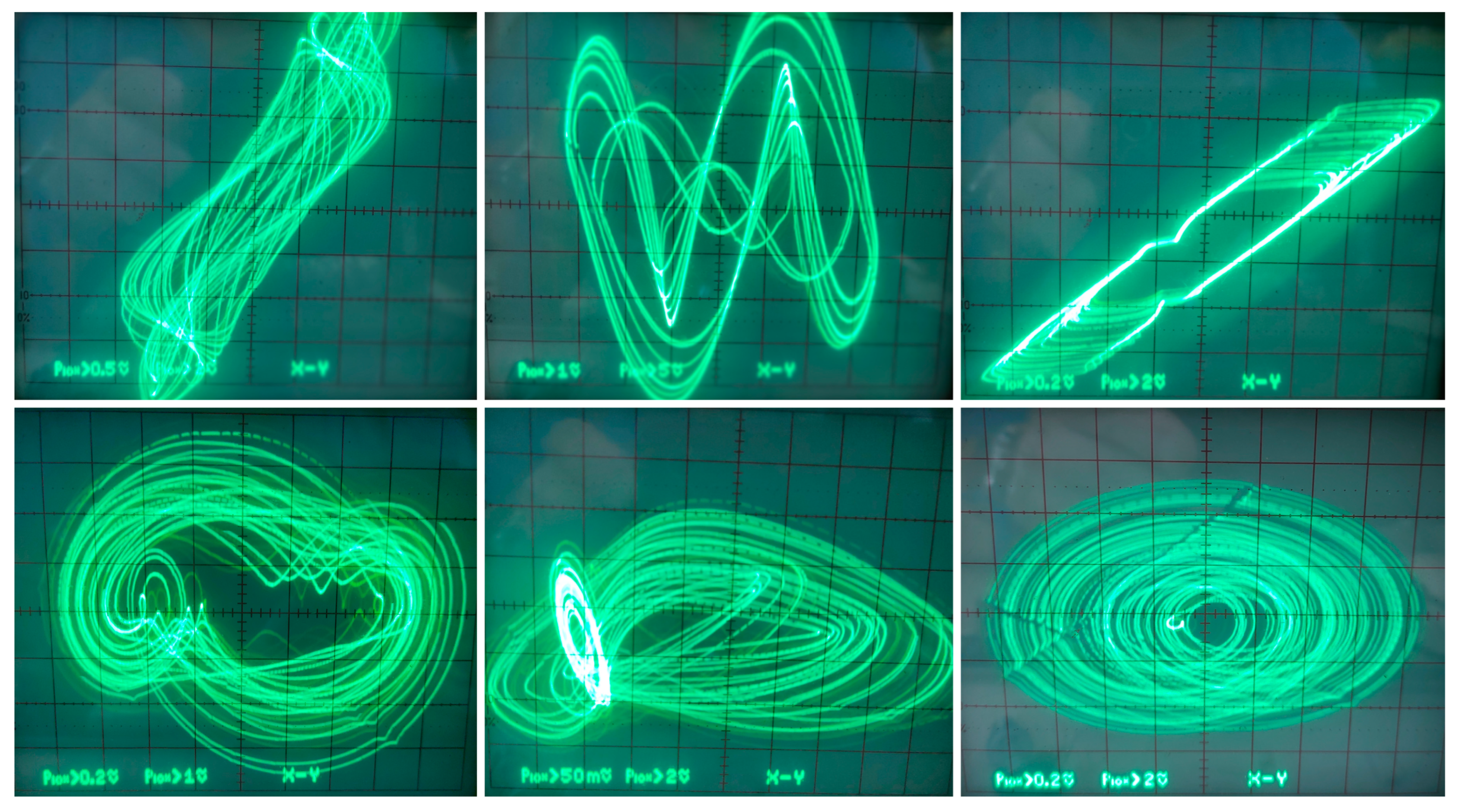
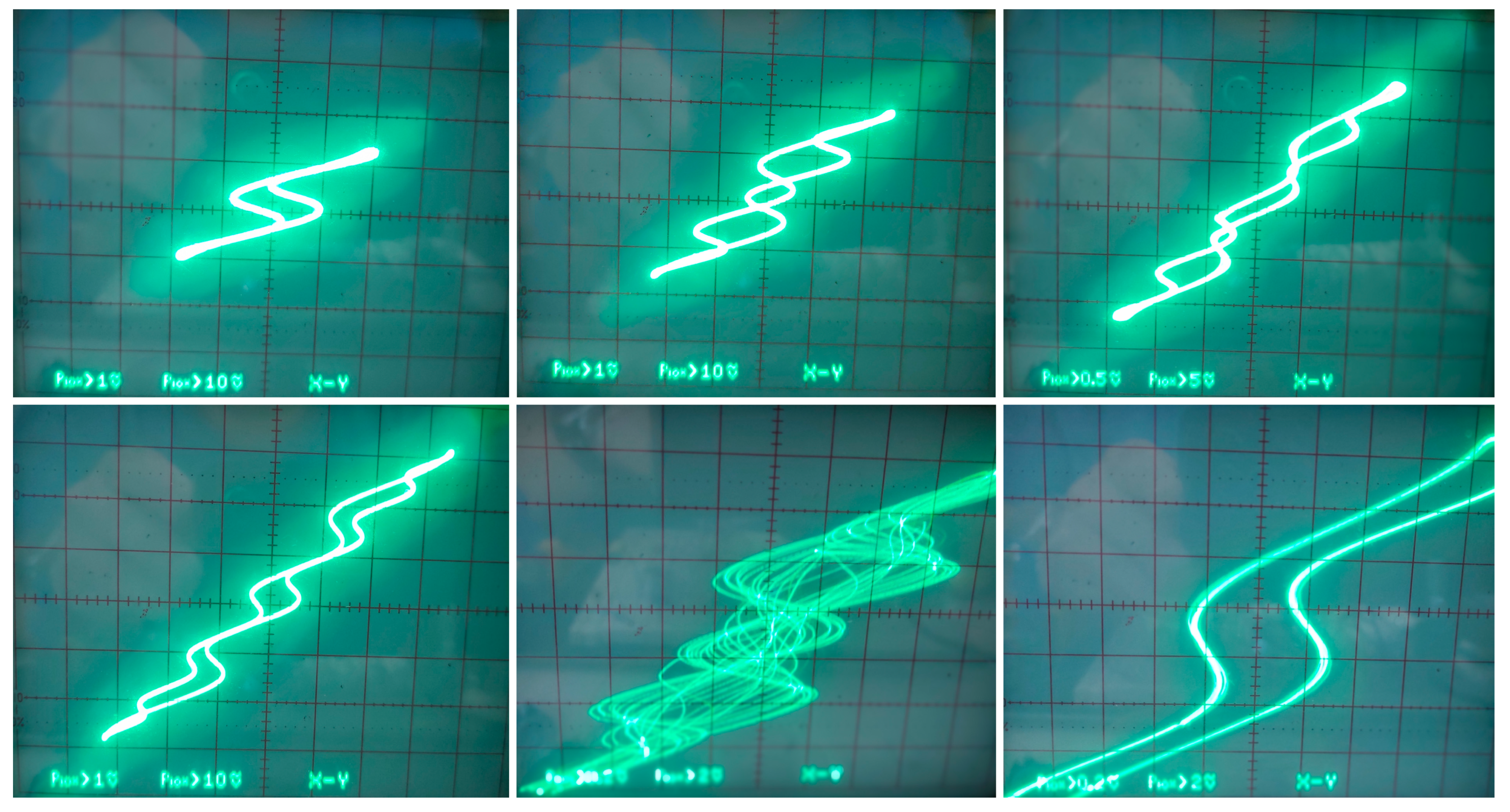
This paper is organized as follows: The next section describes a path leading to a mathematical model dedicated to numerical analysis, which is the content of the third paper section. The fourth part brings experimental verification, i.e., the construction of a flow-equivalent dynamical system based on the following two different but universal methods. Commercially available active devices are used for the realization of both the linear and nonlinear parts of the vector field. Captured oscilloscope screenshots prove that the observed chaotic behavior is neither a numerical artifact nor a long transient.
2. Mathematical Model of Reinartz Oscillator
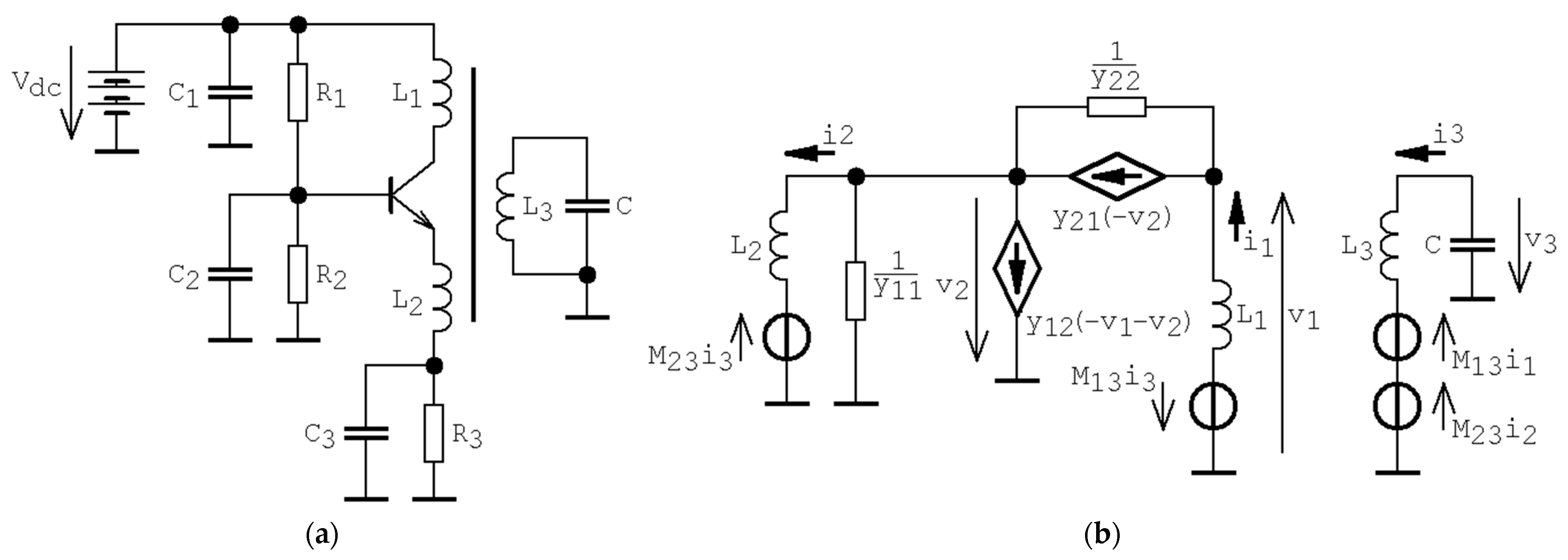
Figure 1a illustrates a circuit topology that is ready for harmonic signal generation, namely, the well-known Reinartz oscillator. This circuit typically produces low-distortion sinusoidal waveforms within a frequency band of about hundreds of kHz, typically up to units of MHz. Of course, the topology can differ slightly for specific applications.
In fact, all resistors are used to set up a bias point of a bipolar transistor, while capacitors C1, C2, and C3 serve for filtering, DC blocking, and temperature drift stabilization of a bias point. Thus, an equivalent circuit for analysis in an operational frequency band can be obtained by shorting the capacitors mentioned above, causing the removal of all resistors. The hypothetical bias point of a generic bipolar transistor will be represented by a conventional two-port network described using four frequency-independent admittance parameters. The input and output admittances will be exclusively positive real numbers. Moreover, we will consider odd-symmetrical cubic polynomial forward transconductance and zero backward transconductance. Investigated autonomous lumped electronic system exploits inductively coupled emitter and collector windings to the main tank circuit formed by passive components L3 and C. However, to avoid unwanted parasitic oscillations, inductors L1 and L2 are not coupled to each other.
Of course, small signal models of bipolar transistors allow us to perform a linear analysis, leading to symbolic formulas for oscillation frequency in the case that the electronic system works just on the boundary of stability. Generally, the characteristic equation will be a fourth-order polynomial with relatively complicated nonzero coefficients. However, a straightforward analysis for a complex frequency jω combined with a few justified simplifications leads to the formula for oscillation frequency .
In linear dynamical systems, chaotic behavior is out of the question. Nevertheless, a bipolar transistor is a nonlinear active element if a large signal must be processed. The dynamical behavior of the circuit given in
Figure 1b is uniquely determined by following the set of first-order ordinary differential equations (ODEs)
where four-dimensional state space is formed by the vector of state variables
x = (
v3,
i1,
i2,
i3)
T.
Note that voltage-controlled current-source
y12(
v) = 0 S and forward trans-conductance
y21(
v) will be a scalar nonlinear function of the form
and symbols
M13 and
M23 represent the mutual inductances of three-wind loss-less transformers described by three linear differential equations
Z·
I =
V (symmetry of impedance matrix
Z along main diagonal indicates that the transformer is a reciprocal element)
The shape of the cubic function (2) reflects the fact that the linear part of iC vs. vBE transfer characteristic is limited on one side by the region where the transistor is closed, and the other side is smoothly trimmed by the region of maximal output current.
The localization of fixed points associated with the dynamical system (1) in conjunction with (2) is very important. Regardless of the values of the system parameters, the origin of state space is always the only equilibrium. The search-for-chaos algorithm that allows us to find chaos within the Reinartz oscillator is focused on the self-excited strange attractors. In this case, the close neighborhood of origin will be unstable (saddle-spiral local geometry ℜ2⊕ℜ2 is preferred) for all combinations of parameters. An absence of offset and quadratic terms in formula (2) leads to the symmetry of a vector field with respect to the origin. Also, forward trans-conductance y21(v) is of saturation type, meaning that α < 0 ^ β > 0. This kind of output–input characteristic of the active element de facto represents the linear transformation of coordinates between a circuit-oriented model and a mathematical model. In other words, the bias point of a bipolar transistor is initially centered within the linear part of the iC = f(vBE) curve. Then, this point is shifted toward the origin of state space. The dynamical system (1) together with (2) is invariant under full linear change of the coordinates v3→–v3, i1→–i1, i2→–i2, and i3→–i3. Simultaneously, both M13 and M23 are the subject of physical realization constraints and will not be larger than the value of 0.6 H.
Several recent papers, for example, [
18,
19,
20,
21,
22], utilize a multi-objective fitness function to find a robust chaotic motion within the lower-order deterministic dynamical systems. The proposed methods are often general, such that both autonomous and driven systems can be investigated. In our case, the same approach as proposed in [
18] has been adopted, i.e., a three-step calculation toward weighted cost function. The first step covers a simple check of the stability of the fixed point located at the origin. In this stage, all sets of parameters leading to unwanted local geometry near the state space origin can be omitted early, significantly saving time demands for optimization. The second test is a calculation of attractor boundedness and dissipation of the flow. If passed, the full spectrum of Lyapunov exponents (LE) is established, and the Kaplan–Yorke dimension of the state space attractor is calculated. For chaos, the first LE needs to be positive, and the sum of all LEs must be negative. For hyperchaos, there is a pair of two significantly positive Les, while the sum of all LEs stands negative. Within each optimization step, the numerical values of all system parameters (defined up to two decimal places) are known. Thus, corresponding eigenvalues associated with a fixed point at the origin can be easily obtained, and an optimal time step size for numerical calculations can be determined and updated accordingly; check paper [
23] for more details. Note that the calculations of individual cost functions are independent; the sets of system parameters are exclusive input variables. Therefore, a search-for-chaos routine is a good candidate for multi-core parallel processing.
Thanks to impedance and time scaling, working accumulation elements can be kept in unity, i.e.,
L3 = 1 H and
C = 1 F, such that the fundamental frequency component equals 159 mHz. The common operational regime deals with the ratio
L1/
L2→10. In an upcoming analysis, we suppose unity inductances
L1 =
L2 = 1 H to unify the time constants associated with individual differential equations. From the viewpoint of watched dynamical system properties, the existence of long-term structurally stable strange attractors is conditioned by the flow dissipation, that is
where
ϕ(
t) represents a state orbit,
F means a four-dimensional vector field, and
Fk is the right-hand side of
k-th ODE. In both cases of investigated chaotic systems (will be revealed below), this function stands negative (in average) for complete ranges of state variables
i1 and
i2 of a fully evolved strange attractor. Another key property of the final dynamical system is the existence of an unstable fixed point located at the origin. This requirement means that the characteristic polynomial
has at least one root with positive real parts. Assume a limited case of zero coupling between windings, i.e.,
M13 = 0 H and
M23 = 0 H. Solving for the roots of polynomial (5) gives us information about the oscillating solution of isolated
L3C tanks and the stability of the rest of the circuit, namely
The eigenvalues λ3,4 can be of any conceivable configuration depending on the relations between y11, y22, and β. This includes eigenvalues that are both real and negative, real with opposite signs, real eigenvalues with positive parts, and complex conjugated numbers with either positive or negative real parts. Obviously, both the input and output admittance of transistors cannot be zero. Important bifurcation planes are given by β = y22 and β = 5·y22 since the third and fourth eigenvalues form a complex conjugated pair between these lines. It is worth mentioning that each change in the vector field geometry near the state space origin is followed by a dramatic change in the global system dynamics. During intensive numerical analysis (especially using the searching for chaos routine), it finally turns out that at least one stable manifold associated with state space origin is needed for chaos and/or hyperchaos evolution. Of course, the existence of unpredictable behavior in the case of full repelor at the origin of state space is not definitely excluded, and it can be considered a possible topic for future investigations.
In the upcoming section of this paper, the results originating from the application of such a brute-force numerical search algorithm applied on basic AC-ready circuit topology of a Reinartz oscillator are provided. Proposed optimization/search routine was implemented in Matlab and can be adopted (with small adaptation changes) for any type of finite-order dynamical system, including those with fractional-order derivations of some state variable. However, the huge number of required numerical operations makes it usable only if appropriate computing power is available. In the case of this work, a workstation composed of i9-10900K (3.7 GHz) and 128 GB RAM was utilized.
3. Numerical Analysis and Results
A mathematical model dedicated to numerical analysis and optimization will be considered dimensionless and expressed in the form of system (1) with nonlinear features of transistor (2), and with {M13, M23, y11, y22, α, β} being a group of unknowns. Within the optimization procedure, the value of each unknown is encoded into a binary expression; the sought parameters can take non-extreme, physically reasonable discrete values only. Two decimal places represent a smooth-enough resolution.
Two distinct sets of parameters that lead to the topologically similar, robust, and chaotic behavior were discovered. Concretely, the first set (case I) is
while the second set (case II) is
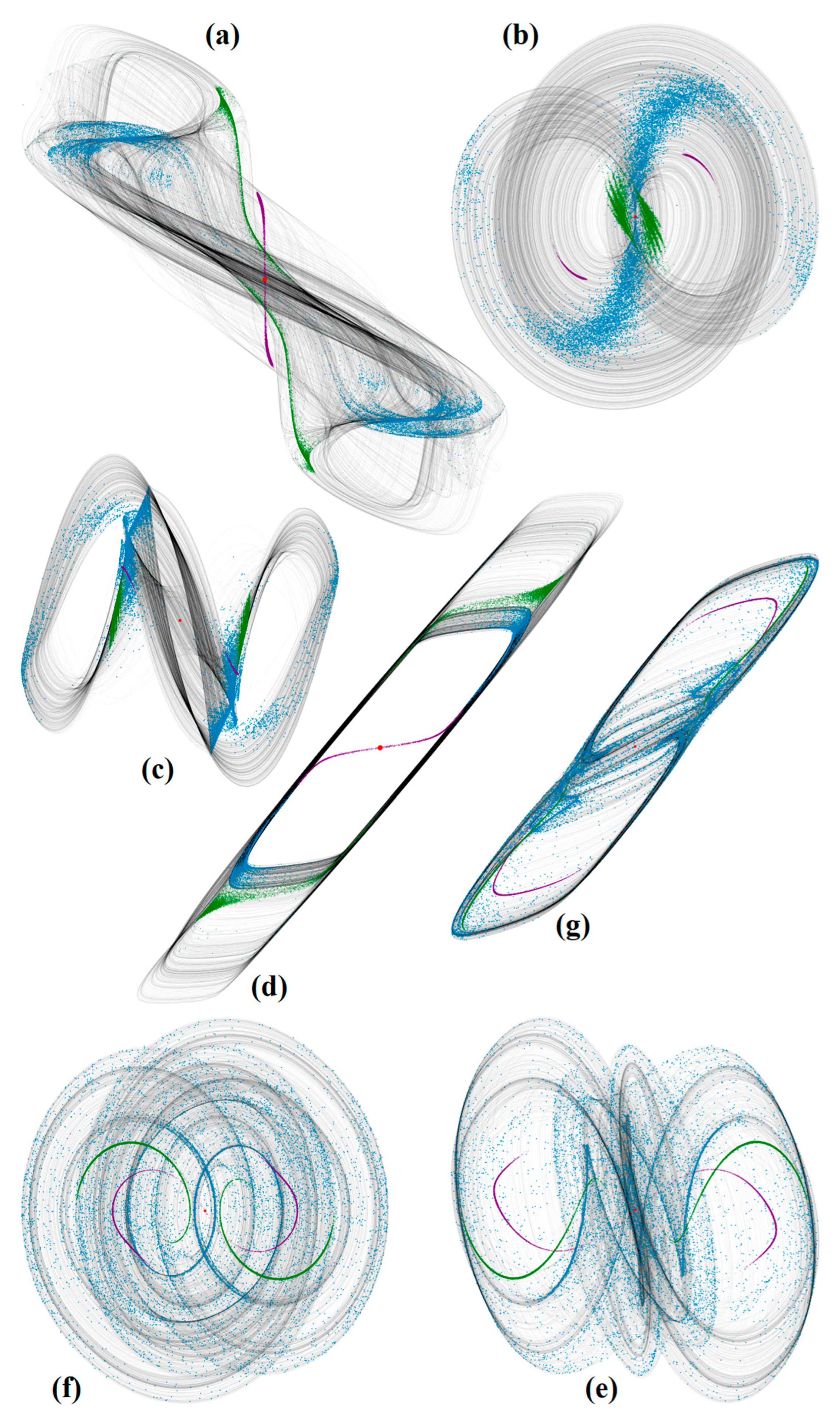
Figure 2 shows both the geometrical shape of a chaotic attractor and the sensitivity dependance on the tiny changes in the initial conditions. For each case mentioned above, a group of 10
4 initial conditions was generated randomly around the state space origin with a normal distribution and standard deviation 10
–2 (red dots). Then, the final states after short-term (
tmax = 10 s, purple points), average-term (
tmax = 50 s, green points), and long-term (
tmax = 100 s, blue points) evolution are stored and visualized. For all simulations, the fourth-order Runge–Kutta integration method was utilized with a fixed time step of 100 μs.
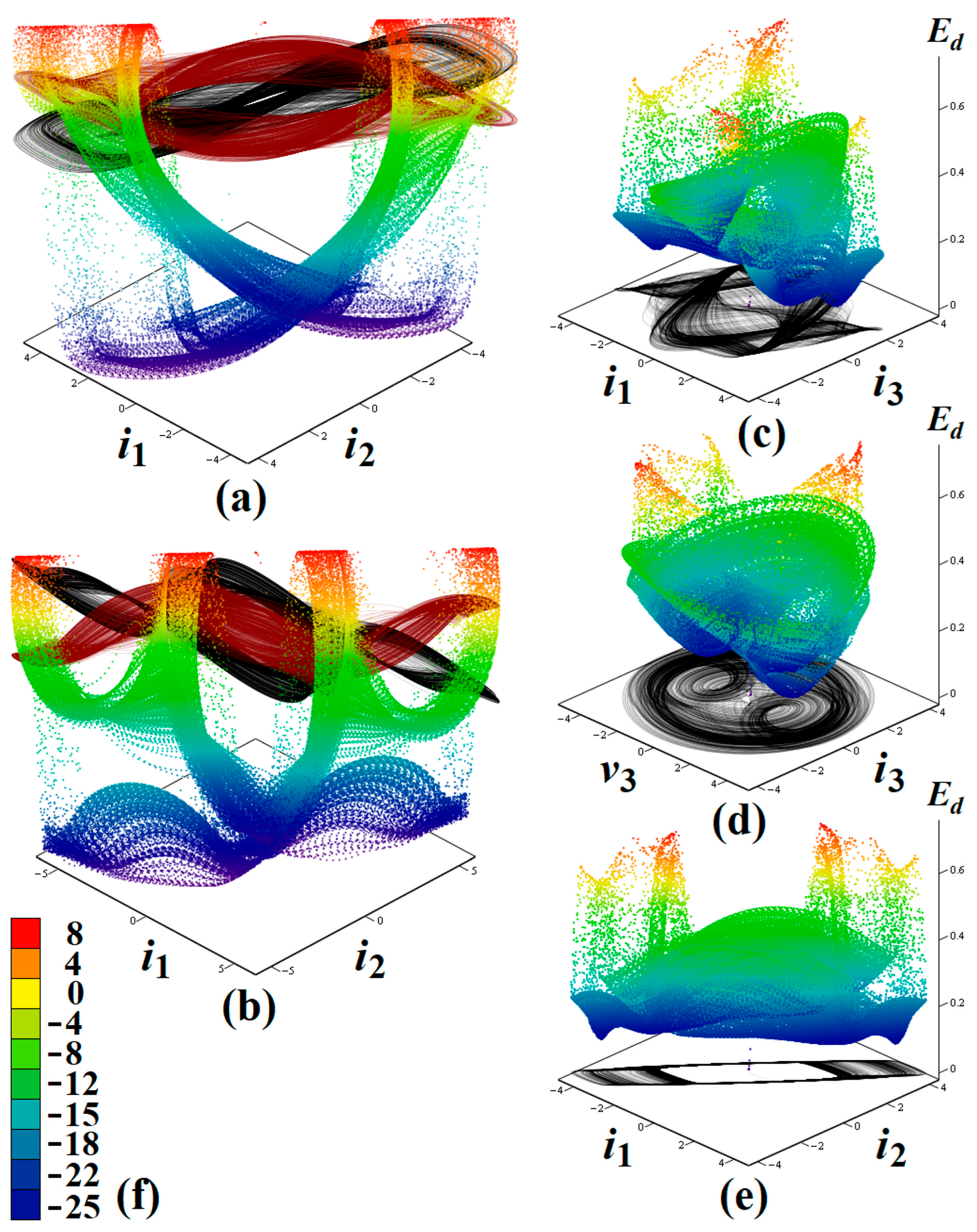
Figure 3 contains interesting numerical results concerning the Reinartz oscillator, case I. Firstly, plots showing the divergency of the vector field along a chaotic orbit can be found there. A typical strange attractor (for
β = 10 S and
β = 11 S) is located within the state space volume with very small positive values and a negative value close to zero.
Figure 3 also provides the distribution of dynamic energy along the trajectory associated with parameter set (7). Note that all mutual inductances
M13 and
M23 for dynamical system case I and II represent tight coupling between primary and secondary windings. For both cases of chaotic systems, the origin is an unstable equilibrium point, as monitored frequently during the search-for-chaos optimization procedure. For parameter set (7), zero equilibrium exhibits a stable two-dimensional manifold, and the corresponding eigenvalues are
In comparison with these results, parameter set (8) leads to the following eigenvalues:
Because of different vector field geometry near the 4D state space origin, self-excited chaotic attractors discovered by searching routine can be marked as distinct types.
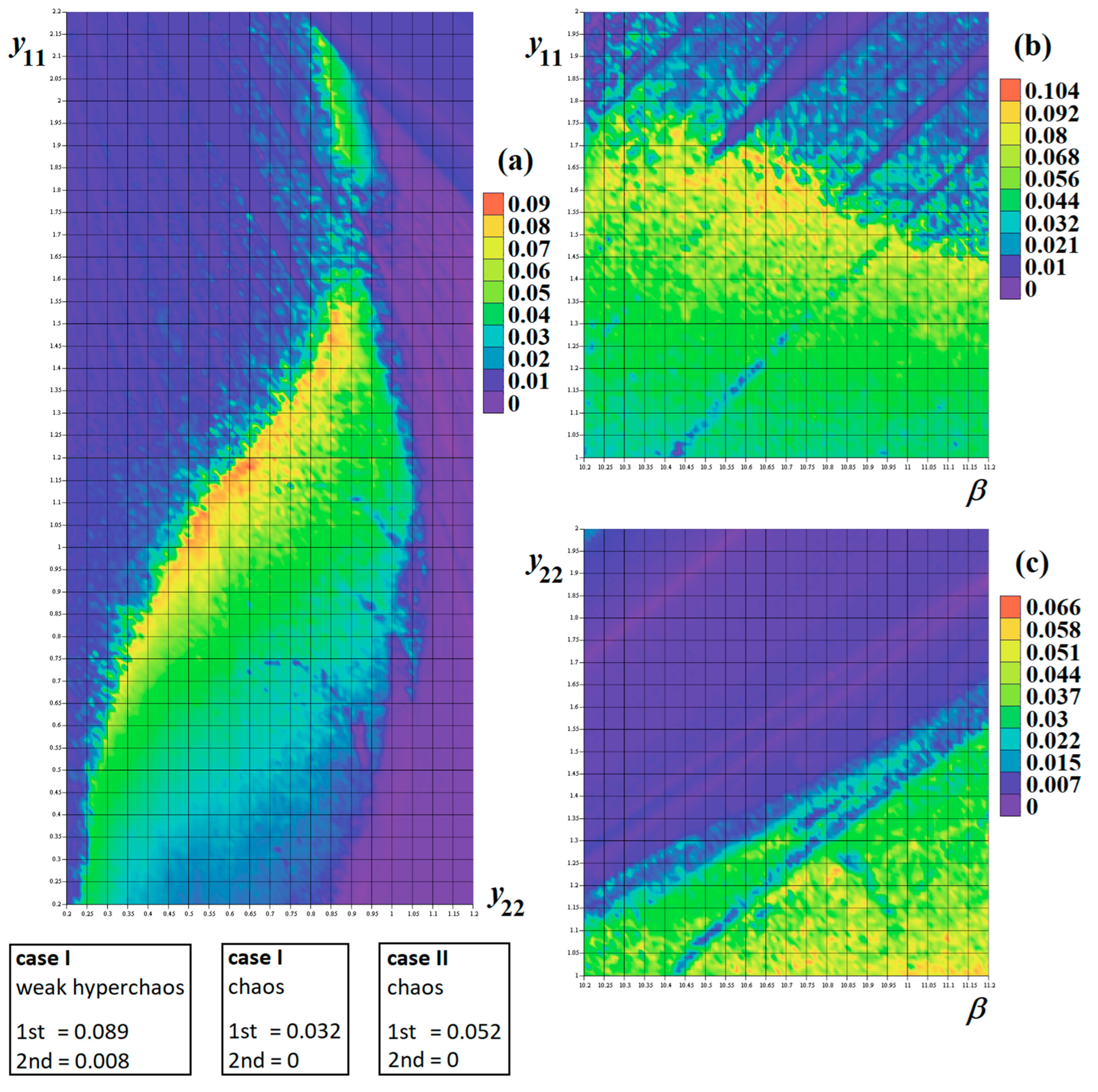
Figure 4 provides a closer insight into how regions of chaos (of course, only a small fragment is addressed) within a hyperspace of system parameters look. These are high-resolution plots with a total number of calculated values of 50 × 50 = 2500 in each square. Transitions between chaotic and hyperchaotic behavior do not follow conventional rules such as changes in eigenvalues or the stability index of zero equilibrium; see paper [
24] for more details. Little can be known about these routes, only that they are rare and cannot be described by a closed-form mathematical formula.
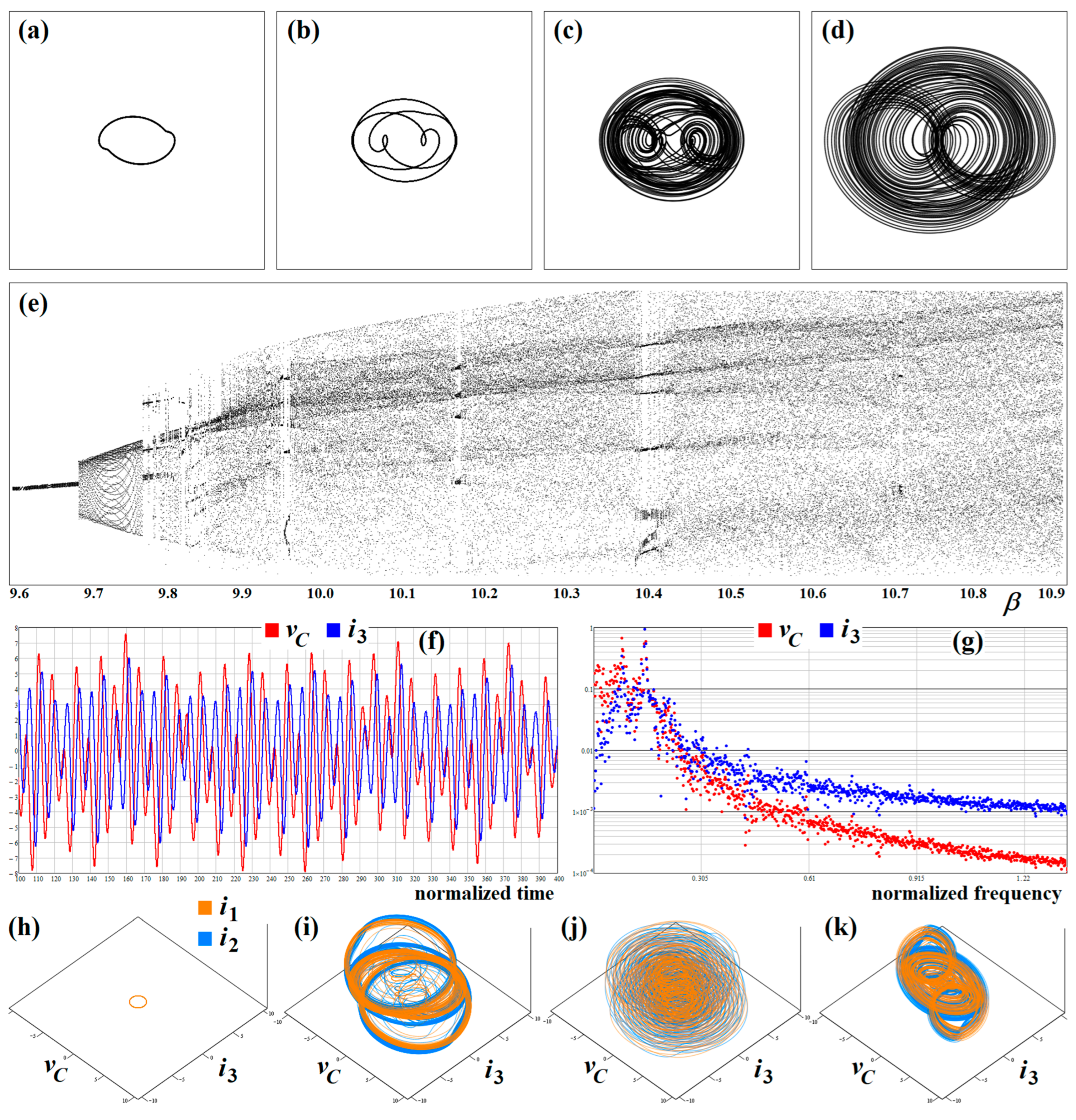
Figure 5 provides a continuation of numerical results, showing time-domain analysis results for the Reinartz oscillator (1) coupled with a parameter set (7). The bifurcation diagram reveals a sudden transition from periodic to chaotic motion and several narrow periodic windows for continuous change in the parameter
β from 9.5 S up to 10.9 S. This bifurcation sequence ends up with an unbounded solution. For all numerical integrations, the initial conditions were chosen as small disturbances (100 mV) of capacitor voltage.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









