

Optimal Treatment Strategy for Cancer Based on Mathematical Modeling and Impulse Control Theory
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Mathematical Model and Its Theoretical Analysis
2.1. A Competition Model for Sensitive and Resistant Cells with Impulsive Effects
2.2. Preliminaries
2.3. Theoretical Analysis
3. Optimal Control Strategies
3.1. Optimal Pulse Time and Dose
3.2. The Optimal Dosage at a Fixed Time
3.3. Optimal Pulse Time and Constant Drug Dose
4. Numerical Simulation
4.1. The Optimal Dosage at a Fixed Time
4.2. Optimal Pulse Time and Constant Drug Dose
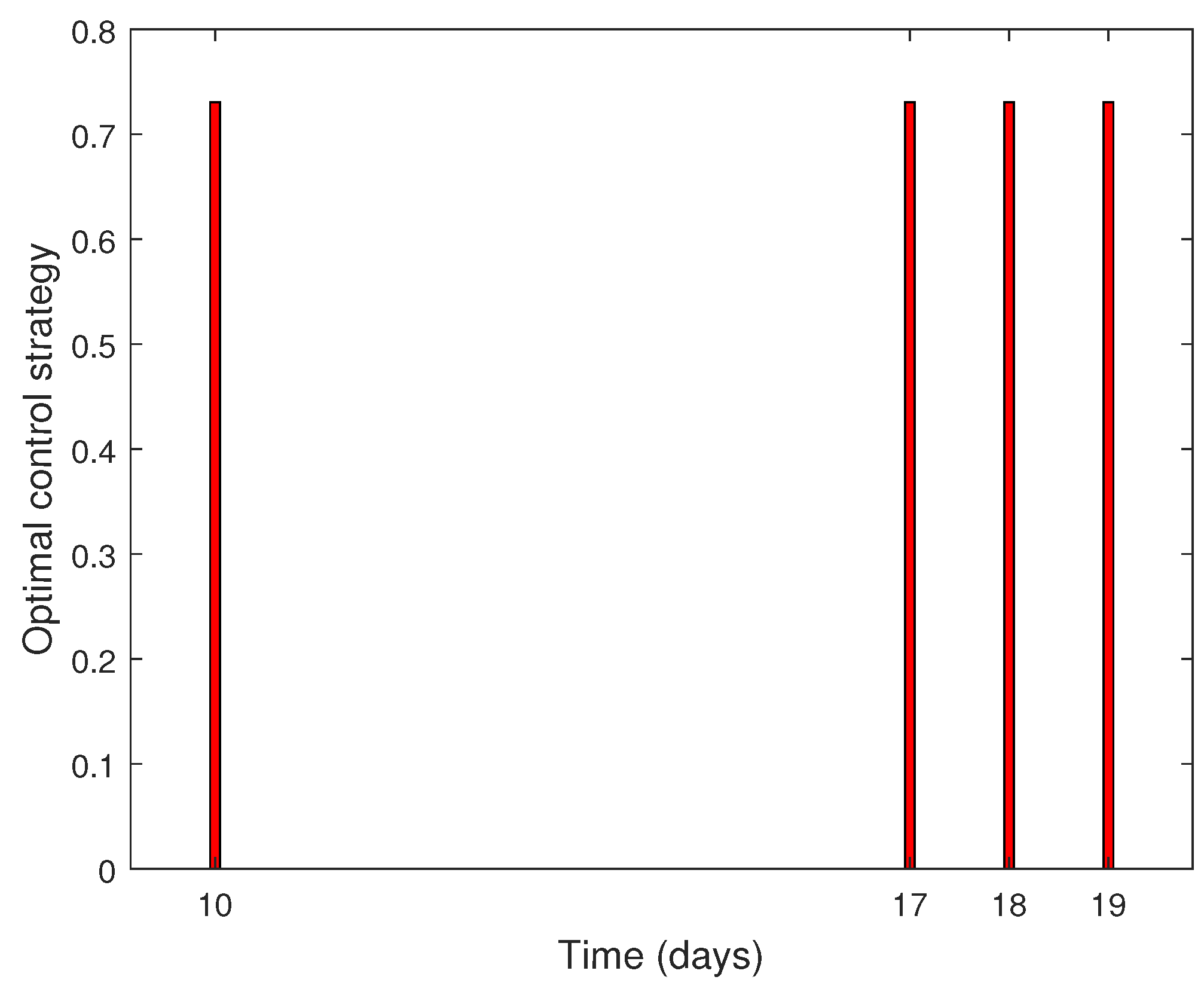
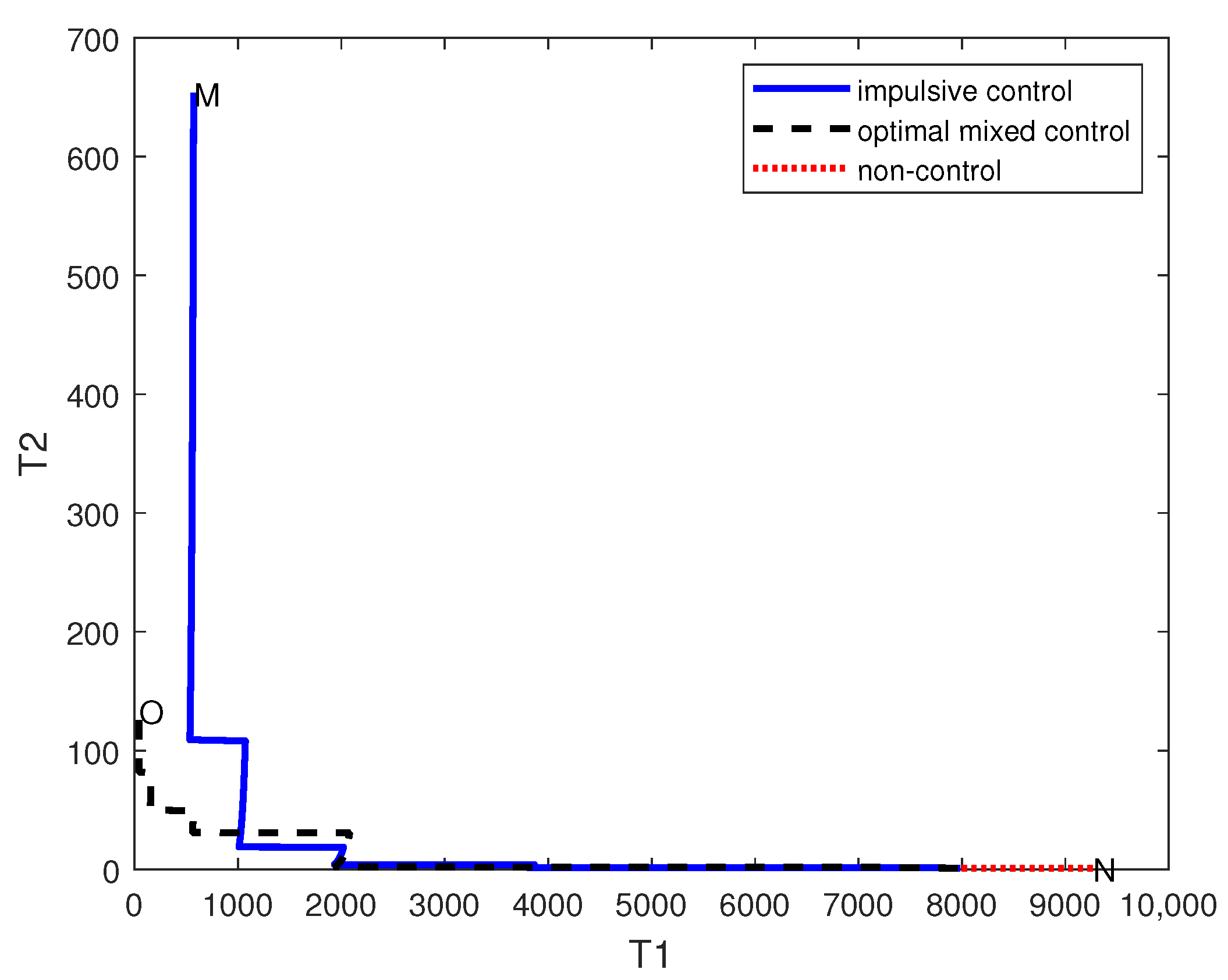
4.3. Optimal Pulse Time and Dose
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sung, H.; Ferlay, J.; Siegel, R.L.; Laversanne, M.; Soerjomataram, I.; Jemal, A.; Bray, F. Global Cancer Statistics 2020: GLOBOCAN Estimates of Incidence and Mortality Worldwide for 36 Cancers in 185 Countries. CA A Cancer J. Clin. 2021, 71, 209–249. [Google Scholar] [CrossRef] [PubMed]
- Gatenby, R.A. A change of strategy in the war on cancer. Nature 2009, 459, 508–509. [Google Scholar] [CrossRef] [PubMed]
- Gatenby, R.A.; Silva, A.S.; Gillies, R.J.; Frieden, B.R. Adaptive therapy. Cancer Res. 2009, 69, 4894–4903. [Google Scholar] [CrossRef] [PubMed]
- West, J.; You, L.; Zhang, J.; Gatenby, R.A.; Brown, J.S.; Newton, P.K.; Anderson, A.R.A. Towards Multidrug Adaptive Therapy. Cancer Res. 2020, 80, 1578–1589. [Google Scholar] [CrossRef] [PubMed]
- Gatenby, R.A.; Brown, J.; Vincent, T. Lessons from applied ecology: Cancer control using an evolutionary double bind. Cancer Res. 2009, 69, 7499–7502. [Google Scholar] [CrossRef] [PubMed]
- Bozic, I.; Reiter, J.G.; Allen, B.; Antal, T.; Chatterjee, K.; Shah, P.; Moon, Y.S.; Yaqubie, A.; Kelly, N.; Le, D.T.; et al. Evolutionary dynamics of cancer in response to targeted combination therapy. eLife 2013, 2, e00747. [Google Scholar] [CrossRef] [PubMed]
- Hansen, E.; Read, A.F. Modifying Adaptive Therapy to Enhance Competitive Suppression. Cancers 2020, 12, 3556. [Google Scholar] [CrossRef] [PubMed]
- Liu, R.; Wang, S.; Tan, X.; Zou, X. Identifying optimal adaptive therapeutic schedules for prostate cancer through combining mathematical modeling and dynamic optimization. Appl. Math. Model. 2022, 107, 688–700. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Y.; Liu, X.; Liu, H. Optimizing Adaptive Therapy Based on the Reachability to Tumor Resistant Subpopulation. Cancers 2021, 13, 5262. [Google Scholar] [CrossRef] [PubMed]
- Huo, L.A.; Ma, Y.C. Dynamical analysis of rumor spreading model with impulse vaccination and time delay. Phys. A Stat. Mech. Appl. 2017, 471, 653–665. [Google Scholar] [CrossRef]
- Teo, K.L.; Goh, C.J.; Wong, K.H. A unified computational approach to optimal control problems. In Proceedings of the First World Congress on World Congress of Nonlinear Analysts, Tampa, FL, USA, 19–26 August 1992; Volume III, pp. 2763–2774. [Google Scholar]
- Chen, M.M.; Pei, Y.Z.; Liang, X.Y.; Lv, Y.F. The Optimal Strategies of SI Pest Control Models with Impulsive Intervention. Acta Mathematica Scientia 2019, 39, 689–704. [Google Scholar]
- Hong, Z.; Xu, W.; Chen, L. A impulsive infective transmission SI model for pest control. Math. Methods Appl. Sci. 2010, 30, 1169–1184. [Google Scholar]
- Liu, Y.; Teo, K.L.; Wang, L. On a Class of Optimal Control Problems with State Jumps. J. Optim. Theory Appl. 1998, 98, 65–82. [Google Scholar] [CrossRef]
- Rui, L. Optimal Control Theory and Application of Pulse Switching System; University of Electronic Science and Technology Press: Chengdu, China, 2010. [Google Scholar]
- Loxton, R.; Lin, Q.; Teo, K.L. Switching time optimization for nonlinear switched systems: Direct optimization and the time-scaling transformation. Pac. J. Optim. 2014, 10, 537–560. [Google Scholar]
- Hou, J. Permanence and Asymptotic Behavior of the Nonautonomous Lotka-Valterra Competitive System with Impulses. J. Biomath. 2009, 24, 213–221. [Google Scholar]
- Hou, J.; Teng, Z.; Gao, S. Partial extinction, permanence and global attractivity innonautonomous n-species Lotka-Volterra competitivesystems with impulses. Appl. Math.-A J. Chin. Univ. 2011, 26, 161–176. [Google Scholar] [CrossRef]
- Parker, F.D. Management of Pest Populations by Manipulating Densities of Both Hosts and Parasites Through Periodic Releases. Biol. Control 1971, 365–376. [Google Scholar]
- Agur, Z.; Cojocaru, L.; Mazor, G.; Anderson, R.M.; Danon, Y.L. Pulse mass measles vaccination across age cohorts. Proc. Natl. Acad. Sci. USA 1993, 90, 11698–11702. [Google Scholar] [CrossRef] [PubMed]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, W.; Tan, X.; Shen, J. Optimal Treatment Strategy for Cancer Based on Mathematical Modeling and Impulse Control Theory. Axioms 2023, 12, 916. https://doi.org/10.3390/axioms12100916
Luo W, Tan X, Shen J. Optimal Treatment Strategy for Cancer Based on Mathematical Modeling and Impulse Control Theory. Axioms. 2023; 12(10):916. https://doi.org/10.3390/axioms12100916
Chicago/Turabian StyleLuo, Wenhui, Xuewen Tan, and Juan Shen. 2023. "Optimal Treatment Strategy for Cancer Based on Mathematical Modeling and Impulse Control Theory" Axioms 12, no. 10: 916. https://doi.org/10.3390/axioms12100916
APA StyleLuo, W., Tan, X., & Shen, J. (2023). Optimal Treatment Strategy for Cancer Based on Mathematical Modeling and Impulse Control Theory. Axioms, 12(10), 916. https://doi.org/10.3390/axioms12100916