Abstract
The fractional Langevin equation has more advantages than its classical equation in representing the random motion of Brownian particles in complex viscoelastic fluid. The Mittag–Leffler (ML) fractional equation without singularity is more accurate and effective than Riemann–Caputo (RC) and Riemann–Liouville (RL) fractional equation in portraying Brownian motion. This paper focuses on a nonlinear ML-fractional Langevin system with distributed lag and integral control. Employing the fixed-point theorem of generalised metric space established by Diaz and Margolis, we built the Hyers–Ulam–Rassias (HUR) stability along with Hyers–Ulam (HU) stability of this ML-fractional Langevin system. Applying our main results and MATLAB software, we have carried out theoretical analysis and numerical simulation on an example. By comparing with the numerical simulation of the corresponding classical Langevin system, it can be seen that the ML-fractional Langevin system can better reflect the stationarity of random particles in the statistical sense.
Keywords:
fractional Langevin system; ML-nonsingular kernel; HUR stable; distributed lag and integral control; numerical simulation MSC:
34K37; 34K20; 37C25
1. Introduction
In 1908, Langevin raised the famous Langevin equation to reveal the dynamics of random motion of particles in fluid. The classical Langevin equation [1] of Brownian particle is formulated by
where is the particle’s position, m expresses the particle’s mass, represents a speed’s proportional coefficient, f is the external force of fluid molecules acting on the Brownian particle. Afterward, many random phenomena and processes were found to be described by Langevin equation [2,3]. However, when using classical Langevin equation to describe complex viscoelasticity, there is a large deviation from the experimental results. This prompted some researchers to modify and generalise the classical Langevin equation. Kubo [4,5] advanced a general Langevin equation to simulate the complex viscoelastic anomalous diffusion process. Eab and Lim [6] introduced a fractional Langevin equation to describe the single-file diffusion. Sandev and Tomovski [7] also set up a fractional Langevin equation model to study the motion of free particles driven by power-law noise. In addition, readers can find the latest research progress of fractional Langevin systems in recent papers [8,9].
As we all know, the stability of the system is of vital important for the application of the system in practice. In 1940s, Hyers and Ulam [10,11] proposed a concept of system stability called HU-stability. In recent ten years, there have many works (some of them [12,13,14,15,16,17]) on HU-stability of fractional system. However, these research findings on fractional Langevin system are all about RC- or RL-fractional derivative. Unfortunately, the RC- and RL-fractional derivatives will produce singularity under some conditions. So the RC- and RL-fractional models are defective in describing some physical phenomena. Consequently, Caputo and Febrizio [18] raised a new exponential kernel nonsingular fractional derivative. And another new nonsingular fractional derivative with ML-kernel is put forward by Atangana and Baleanu in [19]. These nonsingular fractional derivatives have attracted much attention and research in theory [20,21,22,23,24] and application [25,26,27,28,29,30] since they were proposed. As far as we are concerned, there are no papers on UH-type stability of ML-fractional Langevin system. Awaken by above mentioned, this paper primarily concerns a nonlinear ML-fractional Langevin system with distributed lag and integral control written by
where , , and are some constants with , and , expresses the ∗-order ML-fractional derivative, the nonlinear function , the time-lag function with , the initial function , the distributed lag kernel function , the integral control is Riemann–Stieltjes integral, is the function of bounded variation.
The organizational structure of the remaining sections of the manuscript is as below. Section 2 introduces the basic knowledge and results of ML-fractional calculus used later. The HUR-, GHUR-, HU- and HUR-stability of (1) are established by Diaz and Margolis’s fixed-point theorem in Section 3. As an application, the theoretical analysis and numerical simulation on an example are conducted in Section 4. Section 4.2 is a brief conclusion.
2. Preliminaries
Definition 1
([31]). For , and , the left-sided μ-order Mittag–Leffler fractional integral of function is defined by
provided the integral exists, here , is a normalization constant satisfying .
Definition 2
([19]). For , and , the left-sided μ-order Mittag–Leffler fractional derivative of function u in sense of Caputo is given by
where is single parameter Mittag-Leffler function and defines as
Lemma 1
([20]). Assume that . Then the unique solution of below ML-fractional system
is written as
Remark 1.
From Definition 2 and Lemma 1, one easily concludes that iff .
Lemma 2.
Let , , , , , with , , , the integral control be Riemann–Stieltjes integral, and be the function of bounded variation. If , then the nonlinear ML-fractional Langevin system (1) is equivalent to the below delayed nonlinear integral system
where , , .
Proof.
Let , then the first equation of (1) is changed into
On the one hand, assume that is a solution of (1), where . Then, for , one derives from Lemma 1 and (3) that
and
Exchanged the order of integrals, the last quadratic integral of (6) is computed as
Obviously, Equation (8) is the first equation of (2). When , it is evident that holds. So far, we have fully derived the delayed integral Equation (2). That is, is also a solution of delayed integral Equation (2).
On the other hand, when , let’s make a supplementary definition , then and satisfy the system (2) ⇒ and satisfy the system (1). When , if with is a solution of delayed integral Equation (2), then we take -order ML-fractional derivative of (4) and -order ML-fractional derivative of (5) to get the second equation of (1) and (3), respectively. Thus we verify that with is also a solution of the first equation in system (1). The proof is completed. □
Definition 3.
Let be a binary function defined on a nonempty set . If satisfies
- (1)
- nonnegativity, i.e., , and the identity holds only if , ;
- (2)
- commutativity, i.e., , ;
- (3)
- trigonometric inequality, i.e., , .
Then is called a generalised metric space.
Lemma 3
(Diaz and Margolis [32]). Let be a complete generalised metric space, and be a mapping. Assume that the following conditions hold:
- (a)
- For all , there exists a constant such that ;
- (b)
- For some , there exists an integer such that .
Then the below assertions are true:
- (i)
- , as , and ;
- (ii)
- There exists a unique such that ;
- (iii)
- If , then .
3. Existence and Stability
In this section, we will apply Lemma 3 to prove the UHR, GUHR, UH and GUH stability for system (1). Take , Based on Lemma 2, a mapping is introduced as follows:
where , , .
Let , , and be non-decreasing. Consider the following two inequalities
and
Definition 4.
Definition 5.
Definition 6.
Definition 7.
Obviously, HU stable ⇒ GHU stable, and HUR stable ⇒ GHUR stable.
Remark 2.
- (1)
- , ;
- (2)
- , ;
- (3)
- .
Remark 3.
- (1)
- , ;
- (2)
- , ;
- (3)
- .
- (B1)
- , , , are some constants and satisfy , , and ;
- (B2)
- , , , , , the integral control be Riemann–Stieltjes integral, and be the bounded variation;
- (B3)
- , there have two functions satisfying
- (B4)
- , where , and .
Theorem 1.
Proof.
By Definition 6, similar to the Theorem 3.1 in [33], we introduce a complete generalised metric space , where and
A mapping is defined as (9). Based on the conditions and , one knows that is well defined.
Firstly, , when , one has
When , noting that , (12) gives
Together with and (17), one concludes that is a strictly contraction mapping on .
Next, it is necessary to show that there has an integer satisfying that for certain . Indeed, for and an arbitrary , it follows from that and are bounded on and . So there has satisfying
By (12) and (18), one obtains . Thus, all the conditions of Lemma 3 hold. Thereby, in the light of Lemma 3, there has a unique such that, in , , as , , and
Now we shall prove . Obviously, . It suffices to verify . In fact, , based on the boundness of , and on , one has
where is a constant. So , namely, . Hence, one concludes that there has a unique satisfying . Therefore, it follows from Lemma 2 that system (1) exists a unique solution .
Moreover, it follows from Lemma 2 and Remark 3 that the solution of inequality (11) can be expressed as
By (9), one gets
Theorem 2.
Proof.
For , define a complete generalised metric equipped with the distance
and a mapping as (9), respectively. The rest proof is similar to Theorem 1. We won’t repeat it. □
4. An Application
This section provides an example to illustrate the correctness of our main findings. Concurrently, some numerical simulations are carried out by using MATLAB software.
4.1. Theoretical Analysis
Consider the following nonlinear ML-fractional Langevin system with distributed lag and integral control
where , , , , , , , , , , . A direct calculation gives , , , , , , ,
and
4.2. Numerical Simulation
Let , then the Equation (1) is transformed into a system of equations as below:
When , the ML-fractional Langevin system (1) is a classical Langevin system formulated by
Let , then the Equation (27) is transformed into the following equivalent equations
Next we numerically simulate and discuss the solutions of (25) and the corresponding classical system (27).
Discussion. Under the condition of the same parameter value, the simulations of solutions of (25) and its corresponding classical Langevin system are shown as Figure 1 and Figure 2, respectively. The simulations of UH-stability of (25) is shown as Figure 3. is the solution of Langevin system in all figures. It is easily to see from the figures that the solution of the classical Langevin system is strictly monotonically increasing and increases sharply, while the solution of ML-fractional Langevin system oscillates slightly and is relatively smooth and steady. In contrast, the ML-fractional Langevin system (25) can better reflect the stationarity of Brownian particles in the statistical sense. When , the solution curve of the inequality (10) almost coincides with that of system (25), which shows that the system of (25) is HU stable.
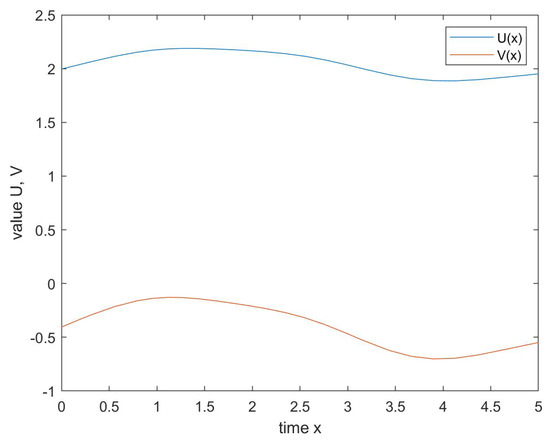
Figure 1.
Solutions of (25).
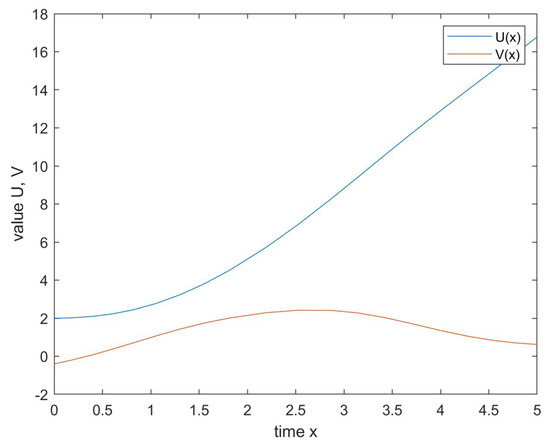
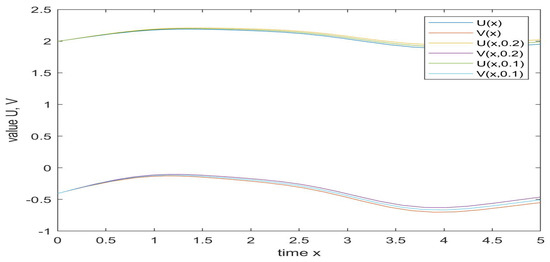
Figure 3.
UH-stability of (25) with .
5. Conclusions
Some studies show that fractional Langevin equation is more effective than classical Langevin equation in describing the random motion of Brownian particles. To my best knowledge, the current papers on fractional Langevin system are all about RL- or CR-fractional derivatives. However, RL- and CR-fractional derivatives produce singularities under certain conditions, which makes them difficult to be applied to some physical fields. Excitedly, the ML-fractional derivative can overcome this disadvantage. In the paper, we first define an appropriate generalised metric on the continuous function space. Then, we obtain some condition for the existence and uniqueness of solution as well as HUR- and HU-stability for the ML-fractional Langevin system (1) with distributed lag and integral control by using Diaz and Margolis’s fixed-point theorem. Using our main outcomes, an example is theoretically analyzed and numerically simulated. Compared with the numerical simulation of the corresponding classical Langevin system, we find that the fractional Langevin system is more detailed and accurate than the corresponding classical Langevin system in describing the change process of the system. Our findings can provide mathematical theoretical support for some physical problems. Furthermore, the mathematical theories and methods used in this paper can be made use of a reference for the study of other fractional differential system.
Funding
The APC was funded by research start-up funds for high-level talents of Taizhou University.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
No data were used to support this study.
Acknowledgments
The author would like to express my heartfelt thanks to the editors and reviewers for their constructive comments.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Hilfer, R. Applications of Fractional Calculus in Physics; World Scientific: Singapore, 2000. [Google Scholar]
- Beck, C.; Roepstorff, G. From dynamical systems to the langevin equation. Physica A 1987, 145, 1–14. [Google Scholar] [CrossRef]
- Coffey, W.; Kalmykov, Y.; Waldron, J. The Langevin Equation; World Scientific: Singapore, 2004. [Google Scholar]
- Kubo, R. The fluctuation-dissipation theorem. Rep. Prog. Phys. 1966, 29, 255. [Google Scholar] [CrossRef] [Green Version]
- Kubo, R.; Toda, M.; Hashitsume, N. Statistical Physics II; Springer: Berlin, Germany, 1991. [Google Scholar]
- Eab, C.; Lim, S. Fractional generalized langevin equation approach to single-file diffusion. Physica A 2010, 389, 2510–2521. [Google Scholar] [CrossRef] [Green Version]
- Sandev, T.; Tomovski, Z. Langevin equation for a free particle driven by power law type of noises. Phys. Lett. A 2014, 378, 1–9. [Google Scholar] [CrossRef]
- Abbas, M.; Ragusa, M. Solvability of Langevin equations with two Hadamard fractional derivatives via Mittag-Leffler functions. Appl. Anal. 2022, 101, 3231–3245. [Google Scholar] [CrossRef]
- Abbas, M. Investigation of Langevin equation in terms of generalized proportional fractional derivatives with respect to another function. Filomat 2021, 35, 4073–4085. [Google Scholar] [CrossRef]
- Ulam, S. A Collection of Mathematical Problems-Interscience Tracts in Pure and Applied Mathmatics; Interscience: New York, NY, USA, 1906. [Google Scholar]
- Hyers, D. On the stability of the linear functional equation. Proc. Nat. Acad. Sci. USA 1941, 27, 2222–2240. [Google Scholar] [CrossRef] [Green Version]
- Rezaei, H.; Jung, S.; Rassias, T. Laplace transform and Hyers-Ulam stability of linear differential equations. J. Math. Anal. Appl. 2013, 403, 244–251. [Google Scholar] [CrossRef]
- Wang, C.; Xu, T. Hyers-Ulam stability of fractional linear differential equations involving Caputo fractional derivatives. Appl. Math.-Czech. 2015, 60, 383–393. [Google Scholar] [CrossRef] [Green Version]
- Haq, F.; Shah, K.; Rahman, G. Hyers-Ulam stability to a class of fractional differential equations with boundary conditions. Int. J. Appl. Comput. Math. 2017, 3, 1135–1147. [Google Scholar] [CrossRef]
- Ibrahim, R. Generalized Ulam-Hyers stability for fractional differential equations. Int. J. Math. 2014, 23, 9. [Google Scholar] [CrossRef] [Green Version]
- Yu, X. Existence and β-Ulam-Hyers stability for a class of fractional differential equations with non-instantaneous impulses. Adv. Differ. Equ. 2015, 2015, 104. [Google Scholar] [CrossRef] [Green Version]
- Gao, Z.; Yu, X. Stability of nonlocal fractional Langevin differential equations involving fractional integrals. J. Appl. Math. Comput. 2017, 53, 599–611. [Google Scholar] [CrossRef]
- Caputo, M.; Fabrizio, M. A new definition of fractional derivative without singular kernel. Progr. Fract. Differ. App. 2015, 1, 73–85. [Google Scholar]
- Atangana, A.; Baleanu, D. New fractional derivatives with nonlocal and non-singular kernel: Theory and application to heat transfer model. Therm. Sci. 2016, 20, 763–769. [Google Scholar] [CrossRef] [Green Version]
- Sadeghi, S.; Jafari, H.; Nemati, S. Operational matrix for Atangana-Baleanu derivative based on Genocchi polynomials for solving FDEs. Chaos Solit. Fract. 2020, 135, 109736. [Google Scholar] [CrossRef]
- Ganji, R.M.; Jafari, H.; Baleanu, D. A new approach for solving multi variable orders differential equations with Mittag-Leffler kernel. Chaos Solit. Fract. 2020, 130, 109405. [Google Scholar] [CrossRef]
- Tajadodi, H. A Numerical approach of fractional advection-diffusion equation with Atangana-Baleanu derivative. Chaos Solit. Fract. 2020, 130, 109527. [Google Scholar] [CrossRef]
- Khan, H.; Khan, A.; Jarad, F.; Shah, A. Existence and data dependence theorems for solutions of an ABC-fractional order impulsive system. Chaos Solit. Fract. 2020, 131, 109477. [Google Scholar] [CrossRef]
- Abbas, M. Nonlinear Atangana-Baleanu fractional differential equations involving the Mittag CLeffler integral operator. Mem. Differ. Equ. Math. 2021, 83, 1–11. [Google Scholar]
- Khan, H.; Li, Y.; Khan, A.; Khan, A. Existence of solution for a fractional-order Lotka-Volterra reaction-diffusion model with Mittag-Leffler kernel. Math. Meth. Appl. Sci. 2019, 42, 3377–3387. [Google Scholar] [CrossRef]
- Acay, B.; Bas, E.; Abdeljawad, T. Fractional economic models based on market equilibrium in the frame of different type kernels. Chaos Solit. Fract. 2020, 130, 109438. [Google Scholar] [CrossRef]
- Khan, A.; Gómez-Aguilar, J.F.; Khan, T.S.; Khan, H. Stability analysis and numerical solutions of fractional order HIV/AIDS model. Chaos Solit. Fract. 2019, 122, 119–128. [Google Scholar] [CrossRef]
- Khan, H.; Gómez-Aguilar, J.F.; Alkhazzan, A.; Khan, A. A fractional order HIV-TB coinfection model with nonsingular Mittag-Leffler Law. Math. Method Appl. Sci. 2020, 43, 3786–3806. [Google Scholar] [CrossRef]
- Koca, I. Modelling the spread of Ebola virus with Atangana-Baleanu fractional operators. Eur. Phys. J. Plus 2018, 133, 100. [Google Scholar] [CrossRef]
- Morales-Delgado, V.F.; Gómez-Aguilar, J.F.; Taneco-Hernández, M.A.; Escobar-Jiménez, R.F.; Olivares-Peregrino, V.H. Mathematical modeling of the smoking dynamics using fractional differential equations with local and nonlocal kernel. J. Nonlinear Sci. Appl. 2018, 11, 1004–1014. [Google Scholar] [CrossRef] [Green Version]
- Jarad, F.; Abdeljawad, T.; Hammouch, Z. On a class of ordinary differential equations in the frame of Atangana-Baleanu fractional derivative. Chaos Solit. Fract. 2018, 117, 16–20. [Google Scholar] [CrossRef]
- Diaz, J.; Margolis, B. Fixed point theorem of the alternative, for contractions on a generalized complete metric space. Bull. Am. Math. Soc. 1968, 74, 305–309. [Google Scholar] [CrossRef] [Green Version]
- Jung, S. A fixed point approach to the stability of differential equations y′ = F(x, y). Bull. Malays. Math. Sci. Soc. 2010, 33, 47–56. [Google Scholar]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).