
Inertial Projection Algorithm for Solving Split Best Proximity Point and Mixed Equilibrium Problems in Hilbert Spaces

 ,
,
Abstract
:1. Introduction
2. Preliminaries
- nonexpansive if
- -inverse strongly monotone if there exists such that
- quasi-nonexpansive if Fix() andwhere Fix(. Observe that nonexpansive mappings are quasi-nonexpansive.
- (a)
- (b)
- (c)
- ;
- (d)
- .
- (B1)
- (B2)
- ψ is monotone, i.e,
- (B3)
- For each
- (B4)
- For each , is convex and lower semicontinuous.
- (a)
- is single-valued;
- (b)
- is firmly-nonexpansive, i.e,
- (c)
- Fix
- (d)
- Fix is closed and convex.
3. Main Result
- (i)
- (ii)
- (iii)
4. Consequences
- (i)
- (ii)
- (i)
- (ii)
- (iii)
- (i)
- (ii)
- (iii)
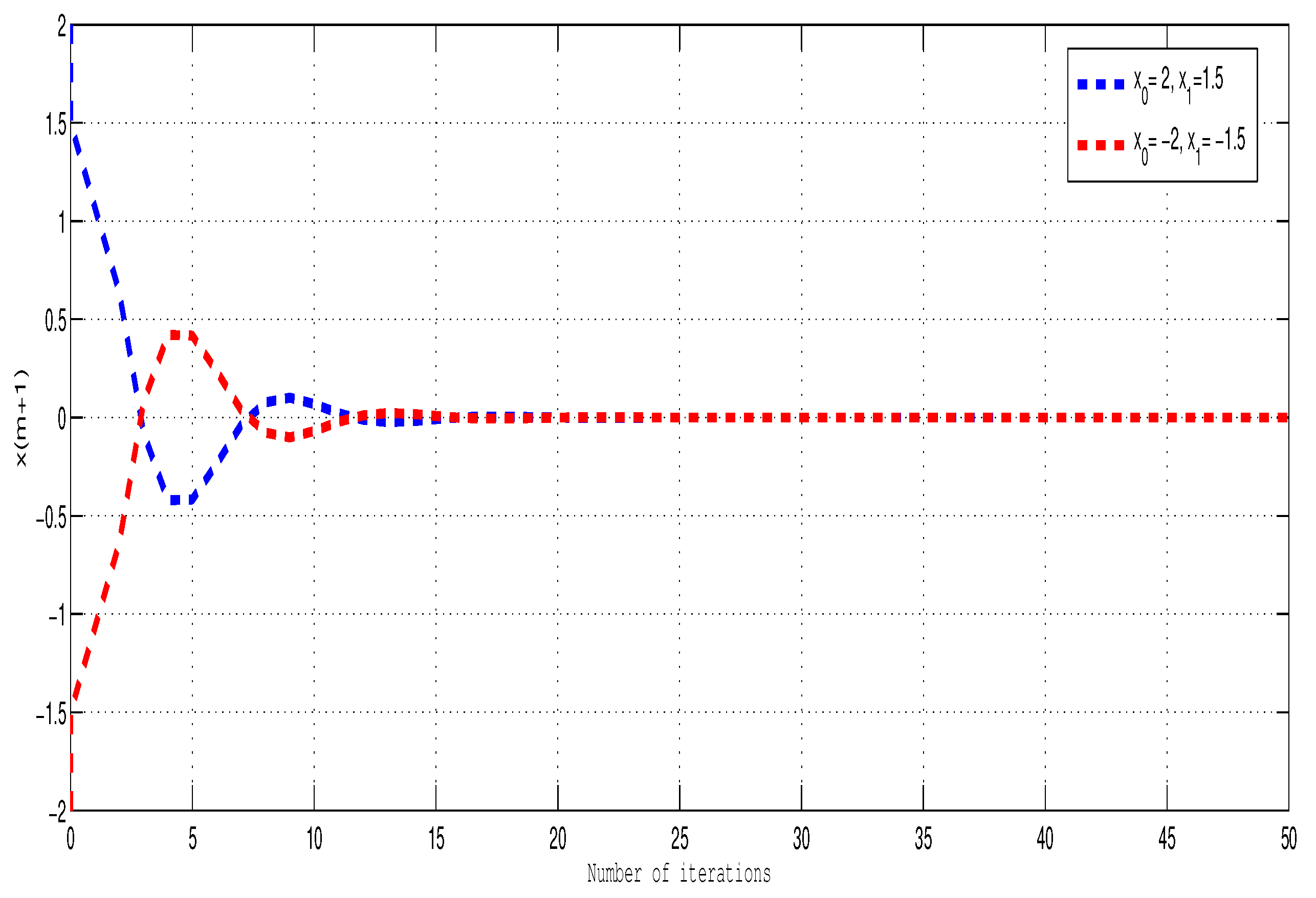
5. Numerical Experiment
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Blum, E.; Oettli, W. From optimization and variational inequalities to equilibrium problems. Math. Stud. 1994, 63, 123–145. [Google Scholar]
- Jolaoso, L.; Alakoya, T.; Taiwo, A.; Mewomo, O. Inertial extragradient method via viscosity approximation approach for solving equilibrium problem in Hilbert space. Optimization 2021, 70, 387–412. [Google Scholar] [CrossRef]
- Suantai, S.; Cholamjiak, P. Algorithms for solving generalized equilibrium problems and fixed points of nonexpansive semigroups in Hilbert spaces. Optimization 2014, 63, 799–815. [Google Scholar] [CrossRef]
- Moudafi, A. Split monotone variational inclusions. J. Optim. Theory Appl. 2011, 150, 275–283. [Google Scholar] [CrossRef]
- Moudafi, A.; Théra, M. Proximal and dynamical approaches to equilibrium problems. In Ill-Posed Variational Problems and Regularization Techniques; Springer: Berlin/Heidelberg, Germany, 1999; pp. 187–201. [Google Scholar]
- Kazmi, K.; Ali, R.; Furkan, M. Krasnoselski-Mann type iterative method for hierarchical fixed point problem and split mixed equilibrium problem. Numer. Algorithms 2018, 77, 289–308. [Google Scholar] [CrossRef]
- Basha, S.S. Best proximity points: Optimal solutions. J. Optim. Theory Appl. 2011, 151, 210–216. [Google Scholar]
- Gabeleh, M. Best proximity point theorems via proximal non-self mappings. J. Optim. Theory Appl. 2015, 164, 565–576. [Google Scholar] [CrossRef]
- Sadiq Basha, S. Best proximity points: Global optimal approximate solutions. J. Glob. Optim. 2011, 49, 15–21. [Google Scholar] [CrossRef]
- Bunlue, N.; Suantai, S. Hybrid algorithm for common best proximity points of some generalized nonself nonexpansive mappings. Math. Methods Appl. Sci. 2018, 41, 7655–7666. [Google Scholar] [CrossRef]
- Suparatulatorn, R.; Suantai, S. A new hybrid algorithm for global minimization of best proximity points in Hilbert spaces. Carpathian J. Math. 2019, 35, 95–102. [Google Scholar] [CrossRef]
- Chadli, O.; Ansari, Q.H.; Yao, J.C. Mixed equilibrium problems and anti-periodic solutions for nonlinear evolution equations. J. Optim. Theory Appl. 2016, 168, 410–440. [Google Scholar] [CrossRef]
- Chidume, C.; Nnakwe, M. A new Halpern-type algorithm for a generalized mixed equilibrium problem and a countable family of generalized nonexpansive-type maps. Carpathian J. Math. 2018, 34, 191–198. [Google Scholar] [CrossRef]
- Combettes, P.L.; Hirstoaga, S.A. Equilibrium programming in Hilbert spaces. J. Nonlinear Convex Anal. 2005, 6, 117–136. [Google Scholar]
- He, Z. The split equilibrium problem and its convergence algorithms. J. Inequalities Appl. 2012, 2012, 162. [Google Scholar] [CrossRef] [Green Version]
- Suantai, S.; Cholamjiak, P.; Cho, Y.J.; Cholamjiak, W. On solving split equilibrium problems and fixed point problems of nonspreading multi-valued mappings in Hilbert spaces. Fixed Point Theory Appl. 2016, 2016, 35. [Google Scholar] [CrossRef] [Green Version]
- Tiammee, J.; Suantai, S. On solving split best proximity point and equilibrium problems in Hilbert spaces. Carpathian J. Math. 2019, 35, 385–392. [Google Scholar] [CrossRef]
- Ceng, L.C.; Yao, J.C. A hybrid iterative scheme for mixed equilibrium problems and fixed point problems. J. Comput. Appl. Math. 2008, 214, 186–201. [Google Scholar] [CrossRef] [Green Version]
- Konnov, I.; Schaible, S.; Yao, J.C. Combined relaxation method for mixed equilibrium problems. J. Optim. Theory Appl. 2005, 126, 309–322. [Google Scholar] [CrossRef]
- Yao, Y.; Noor, M.A.; Zainab, S.; Liou, Y.C. Mixed equilibrium problems and optimization problems. J. Math. Anal. Appl. 2009, 354, 319–329. [Google Scholar] [CrossRef] [Green Version]
- Alvarez, F.; Attouch, H. An inertial proximal method for maximal monotone operators via discretization of a nonlinear oscillator with damping. Set-Valued Anal. 2001, 9, 3–11. [Google Scholar] [CrossRef]
- Maingé, P.E. Convergence theorems for inertial KM-type algorithms. J. Comput. Appl. Math. 2008, 219, 223–236. [Google Scholar] [CrossRef] [Green Version]
- Agarwal, R.P.; O’Regan, D.; Sahu, D. Fixed Point Theory for Lipschitzian-Type Mappings with Applications; Springer: Berlin/Heidelberg, Germany, 2009; Volume 6. [Google Scholar]
- Raj, V.S. Best proximity point theorems for non-self mappings. Fixed Point Theory 2013, 14, 447–454. [Google Scholar]
- Marino, G.; Xu, H.K. Weak and strong convergence theorems for strict pseudo-contractions in Hilbert spaces. J. Math. Anal. Appl. 2007, 329, 336–346. [Google Scholar] [CrossRef] [Green Version]
- Combettes, P.L. Quasi-Fejérian analysis of some optimization algorithms. In Studies in Computational Mathematics; Elsevier: Amsterdam, The Netherlands, 2001; Volume 8, pp. 115–152. [Google Scholar]

{kind=link}
| No. of Iterations | ||
|---|---|---|
| 1 | 2.000000 | −2.000000 |
| 4 | −0.080913 | 0.080913 |
| 8 | −0.039415 | 0.039415 |
| 12 | 0.022187 | −0.022187 |
| 16 | −0.008031 | 0.008031 |
| 20 | 0.002478 | −0.002478 |
| 24 | −0.000699 | 0.000699 |
| 28 | 0.000186 | −0.000186 |
| 32 | −0.000047 | 0.000047 |
| 36 | 0.000011 | −0.000011 |
| 40 | −0.000003 | 0.000003 |
| 44 | 0.000001 | −0.000001 |
| 48 | 0.000000 | 0.000000 |
| 52 | 0.000000 | 0.000000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Husain, S.; Khan, F.A.; Furkan, M.; Khairoowala, M.U.; Eljaneid, N.H.E. Inertial Projection Algorithm for Solving Split Best Proximity Point and Mixed Equilibrium Problems in Hilbert Spaces. Axioms 2022, 11, 321. https://doi.org/10.3390/axioms11070321
Husain S, Khan FA, Furkan M, Khairoowala MU, Eljaneid NHE. Inertial Projection Algorithm for Solving Split Best Proximity Point and Mixed Equilibrium Problems in Hilbert Spaces. Axioms. 2022; 11(7):321. https://doi.org/10.3390/axioms11070321
Chicago/Turabian StyleHusain, Shamshad, Faizan Ahmad Khan, Mohd Furkan, Mubashshir U. Khairoowala, and Nidal H. E. Eljaneid. 2022. "Inertial Projection Algorithm for Solving Split Best Proximity Point and Mixed Equilibrium Problems in Hilbert Spaces" Axioms 11, no. 7: 321. https://doi.org/10.3390/axioms11070321
APA StyleHusain, S., Khan, F. A., Furkan, M., Khairoowala, M. U., & Eljaneid, N. H. E. (2022). Inertial Projection Algorithm for Solving Split Best Proximity Point and Mixed Equilibrium Problems in Hilbert Spaces. Axioms, 11(7), 321. https://doi.org/10.3390/axioms11070321