With the knowledge about the eigenvalue spectrum, we can formulate stable choices for the most important parameters of the PFE method: the outer time step size and the inner time step size .
4.3.2. Analysis for Inner Time Step Size
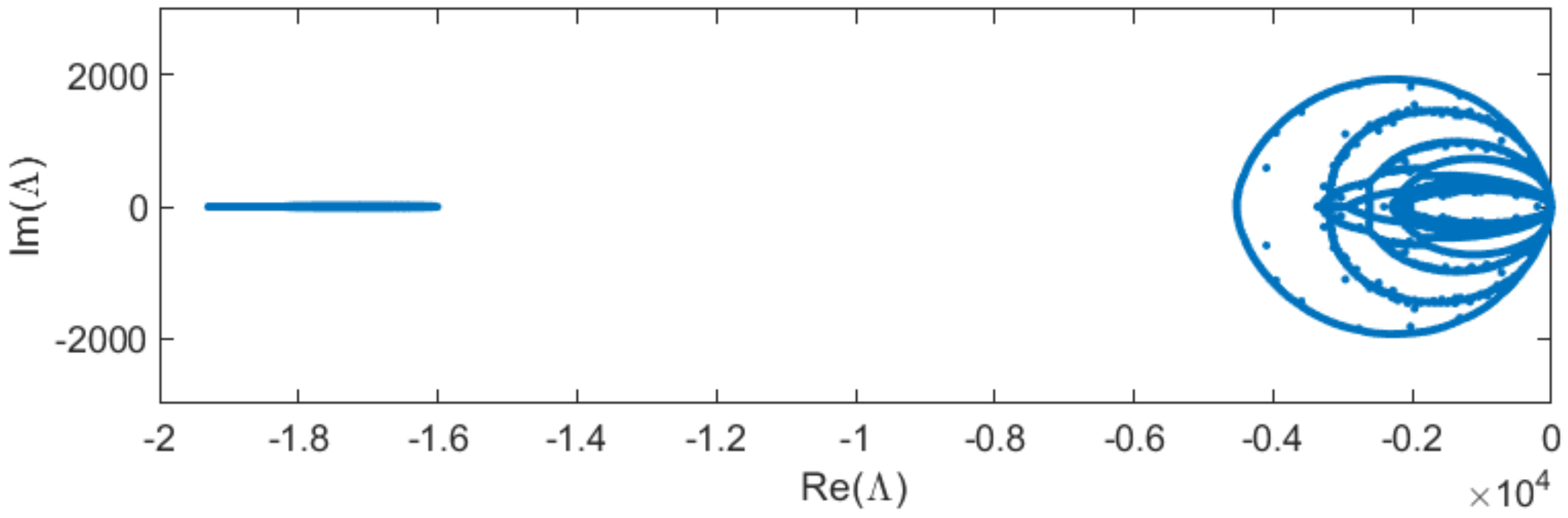
The inner time step
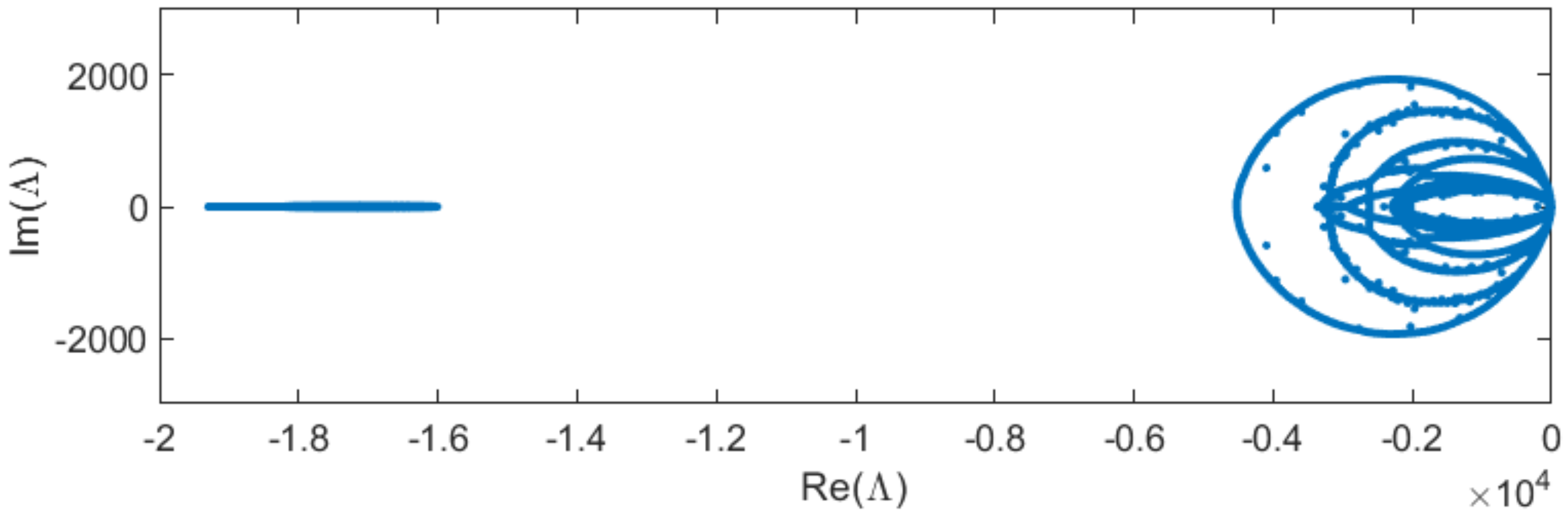
is chosen based on the fast eigenvalue cluster of the eigenvalue spectrum of the complete matrix
including the stiff source term. We denoted this eigenvalue as
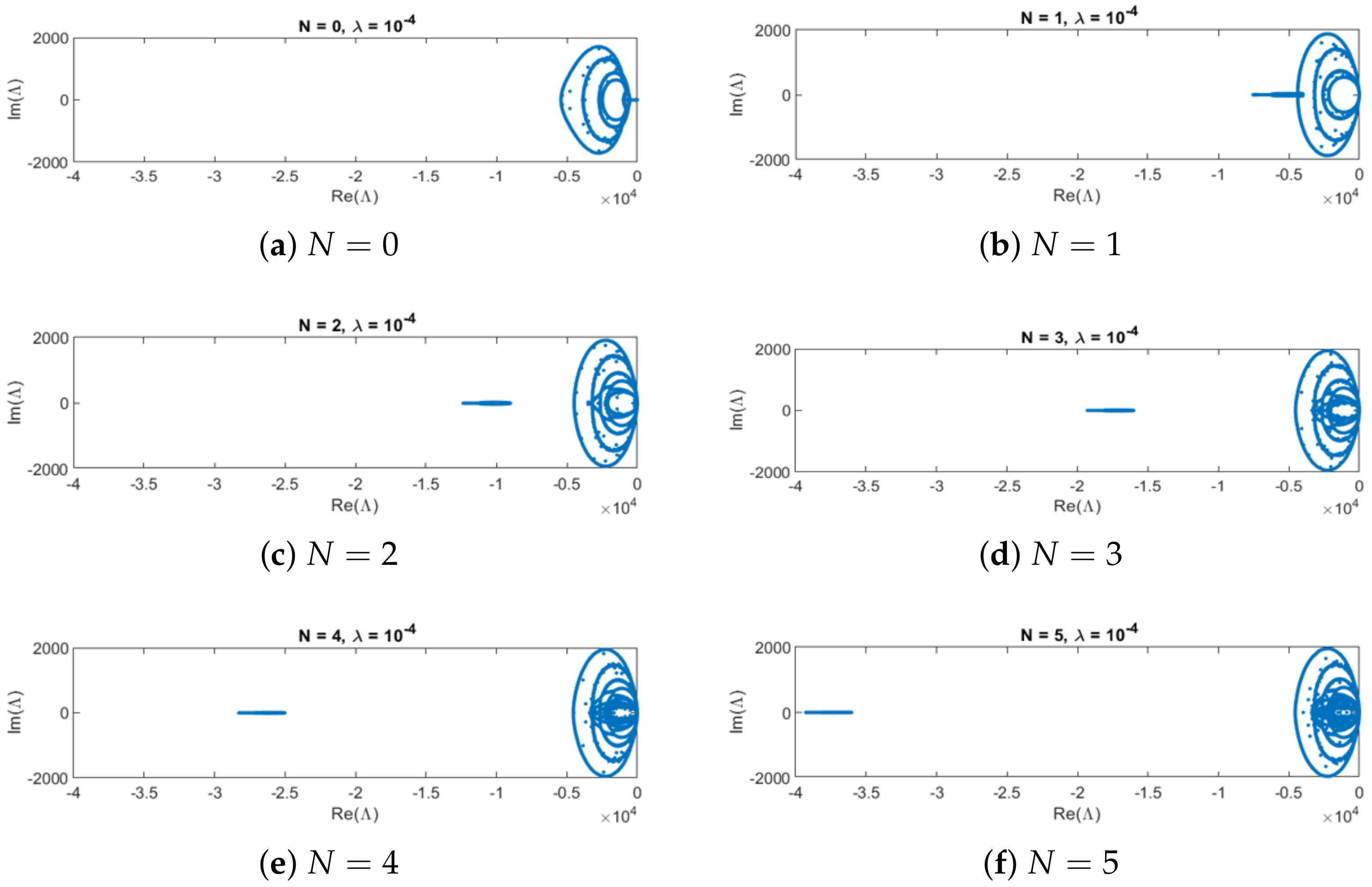
and have observed its behavior using different cases in
Figure 3 and
Figure 4. As mentioned before, a stable inner time step size
is later chosen as the inverse of the fastest eigenvalue, i.e.,
.
Based on the numerical computation of the spectral analysis, we propose an approximate formula which calculates
directly for the dam break test case using the FORCE scheme:
where
N denotes the number of moments,
denotes the spatial grid size, and
is the slip length. The formula was obtained using a careful experimental study with varying
,
, and
, as will be explained below. The complete set of data is given in
Table A1,
Table A2,
Table A3,
Table A4 and
Table A5 in
Appendix C.
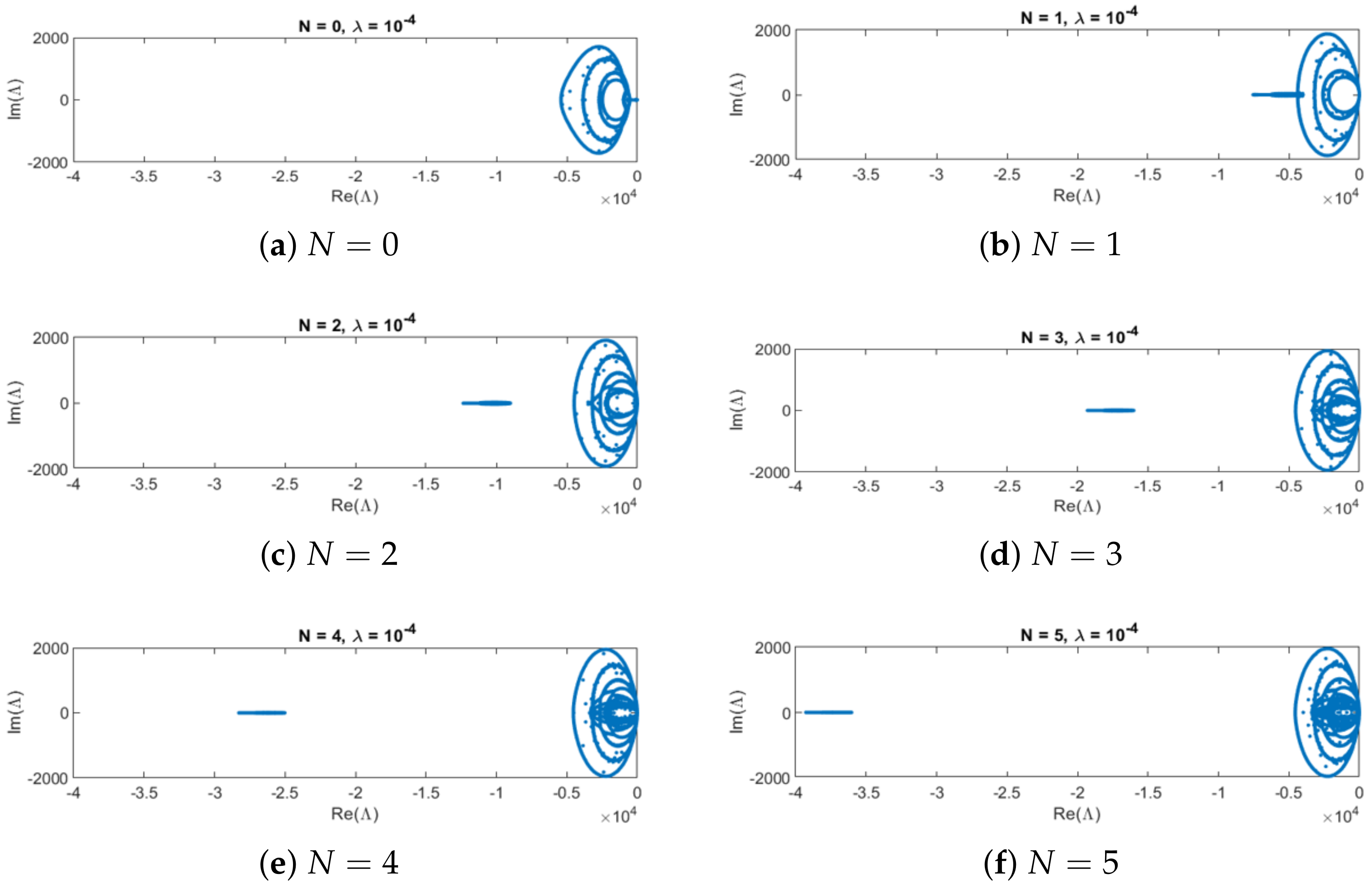
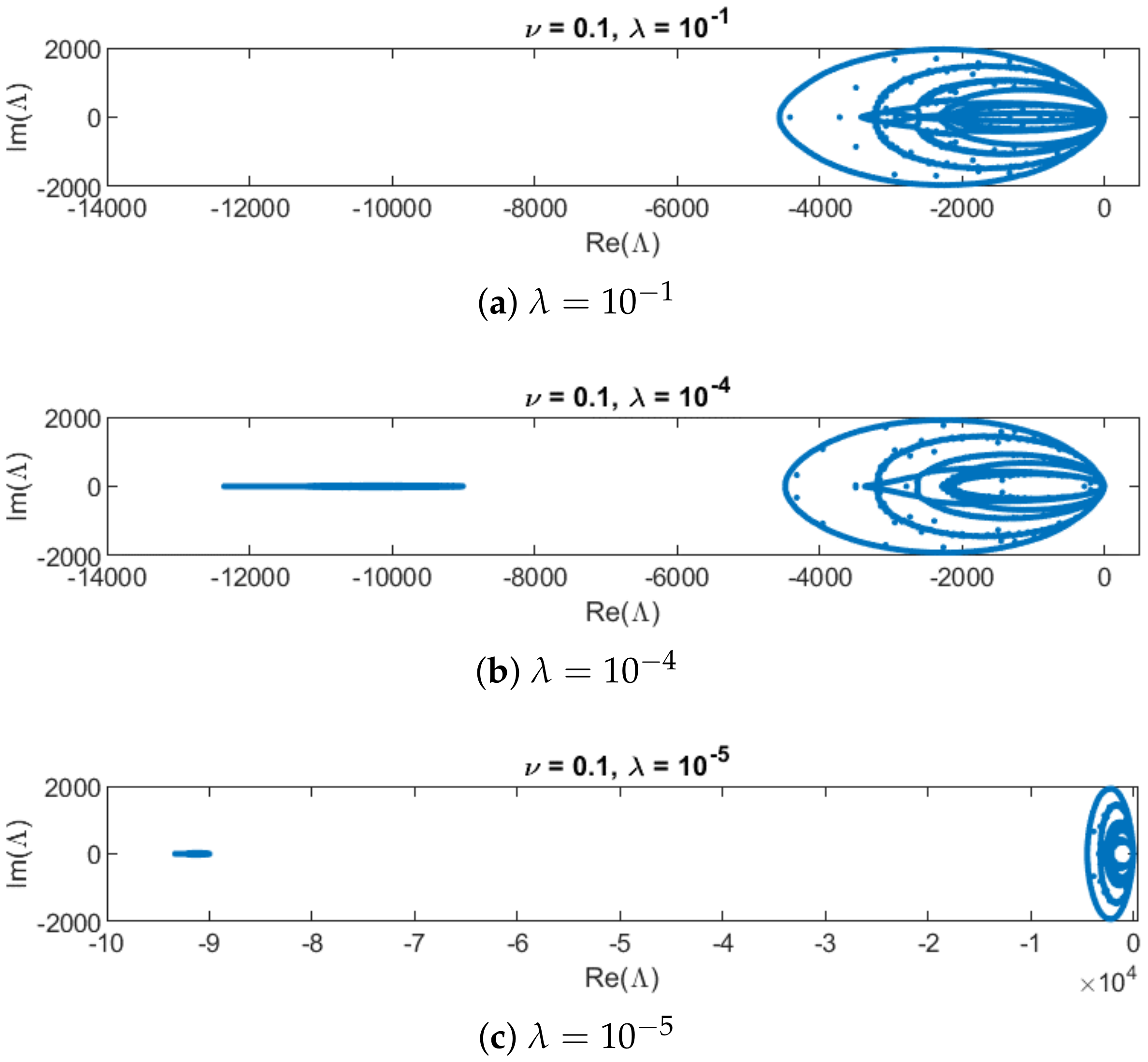
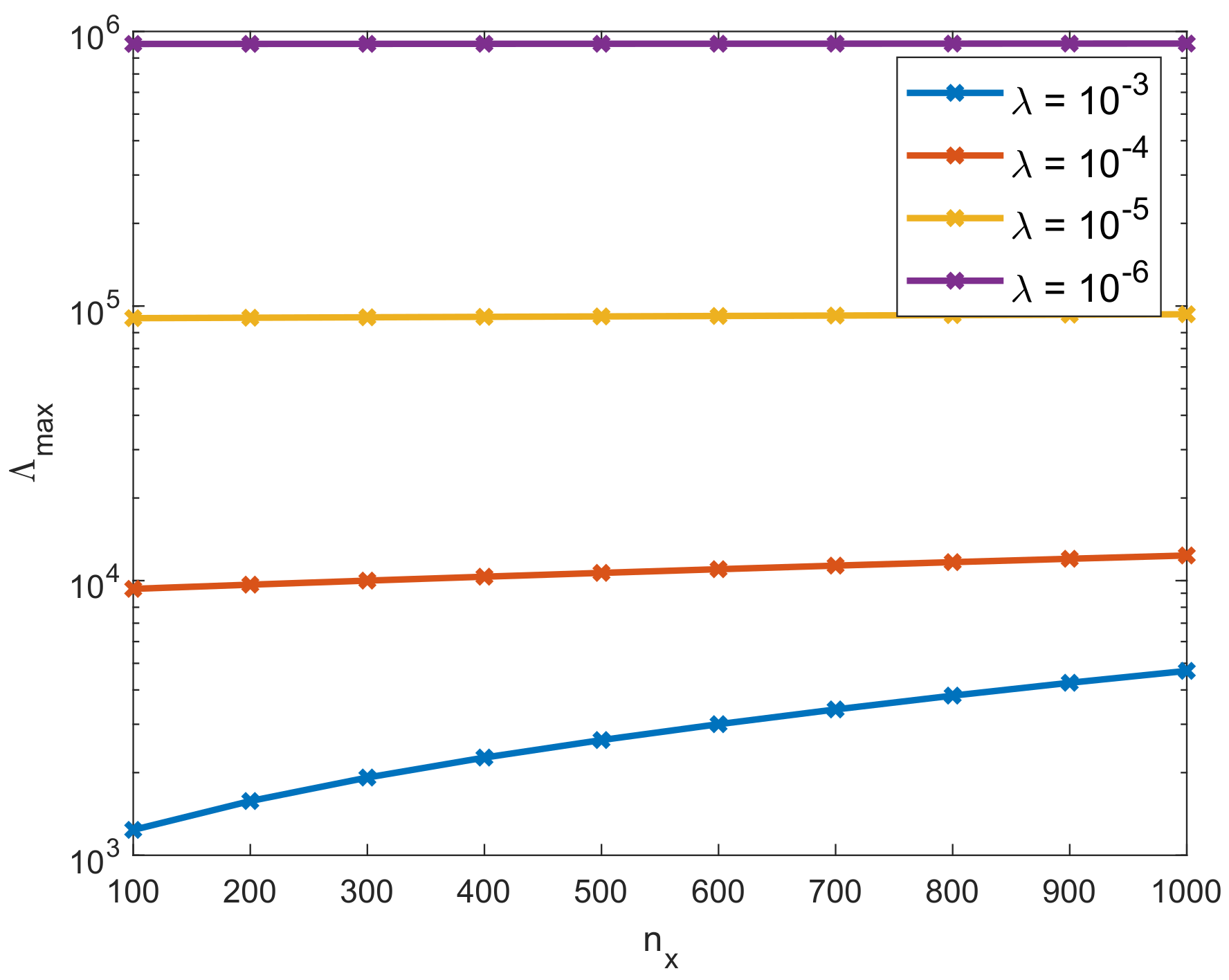
First, we consider the rightmost contribution
that contains the dependency on
, compare also
Figure 4.
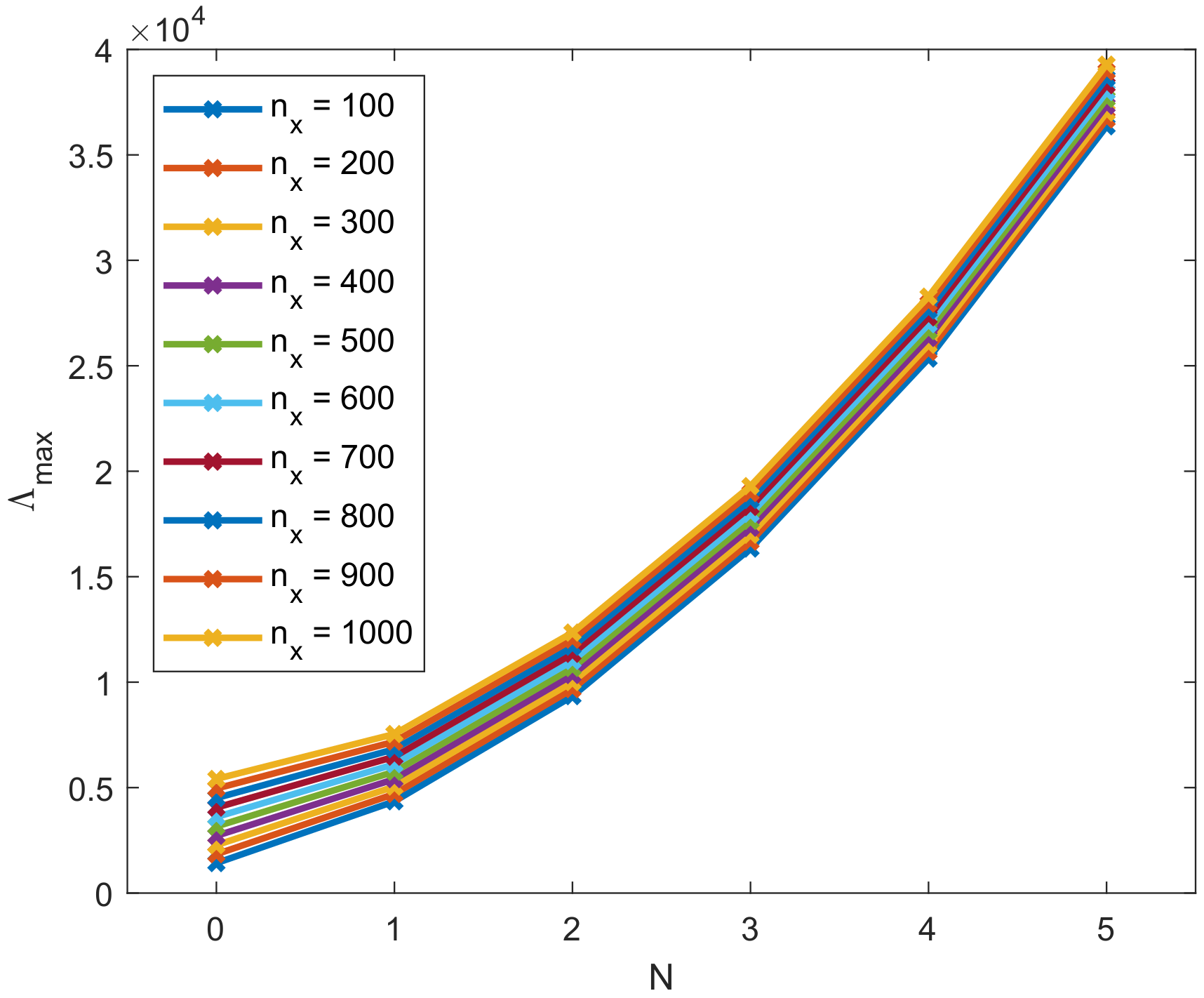
Figure 5 shows the numerically computed
for varying slip length
and varying spatial resolution
when
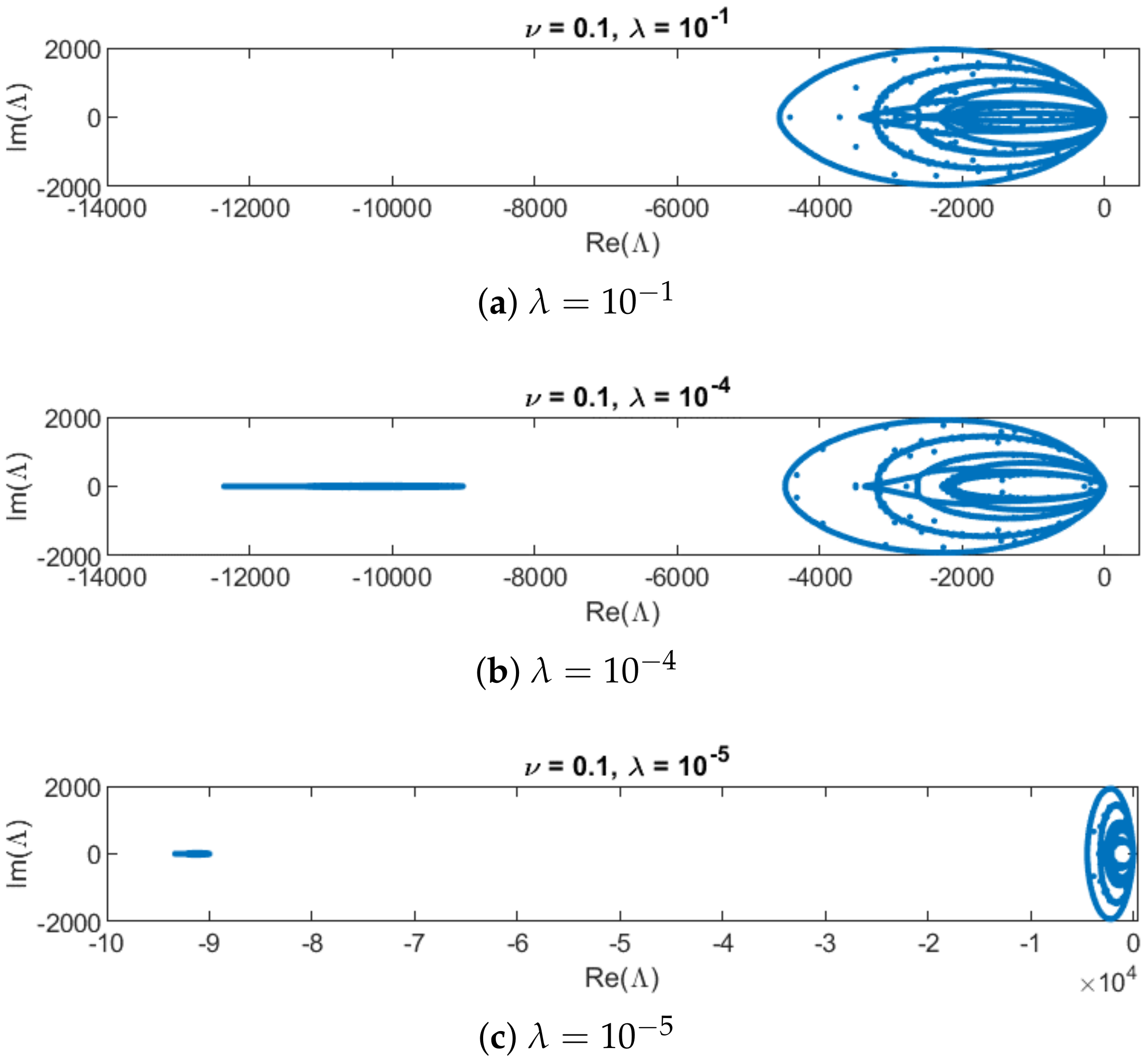
. However, before identifying the contribution of
to
, we first need to split the dependency on
and
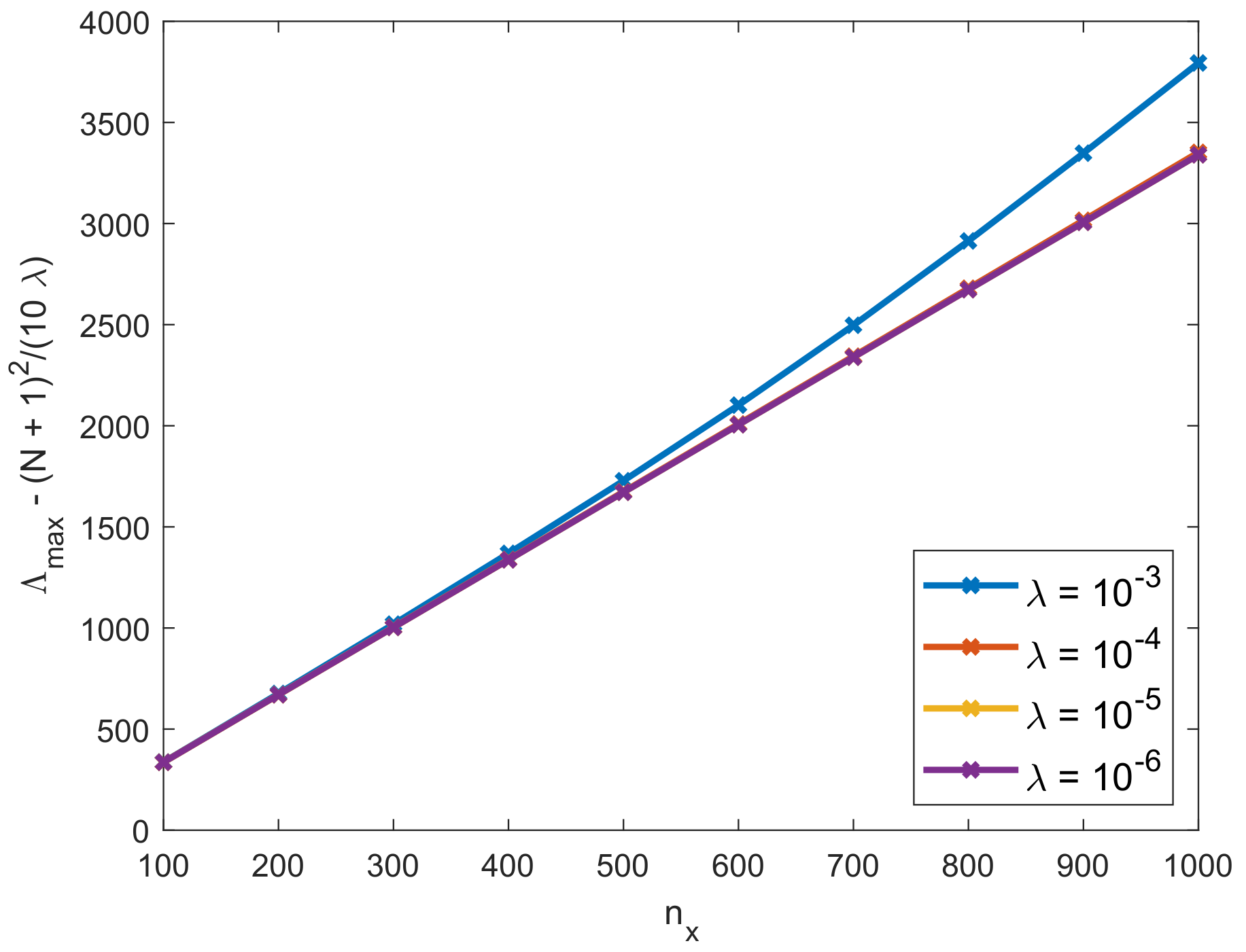
. In
Figure 6, we see that
is practically independent of the slip length
, especially for the important case of small
. The numerically computed values of the eigenvalues
can thus be split into two terms, which will be given by
, for more details see
Table A2. The numerator of the last term can be expressed as
according to
Table A3. The rightmost contribution in (
29) given by
thus correctly models the dependency on
.
To study the rest of the formula, we investigate the remaining part
, and we will validate the model in Equation (
29), i.e.,
In
Figure 6, we have observed that this part is independent of the slip length
for small
. The following test cases thus use a fixed slip length
.
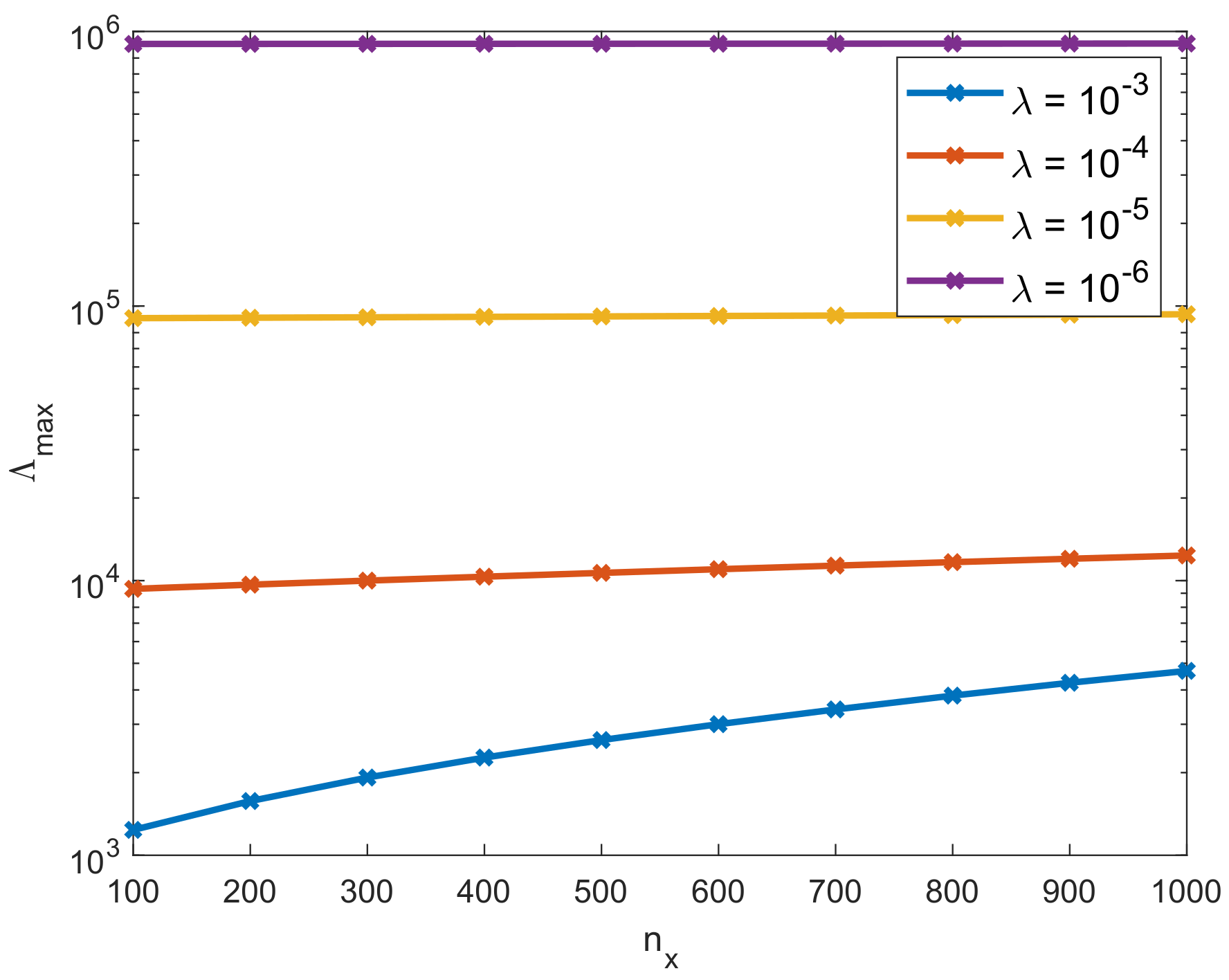
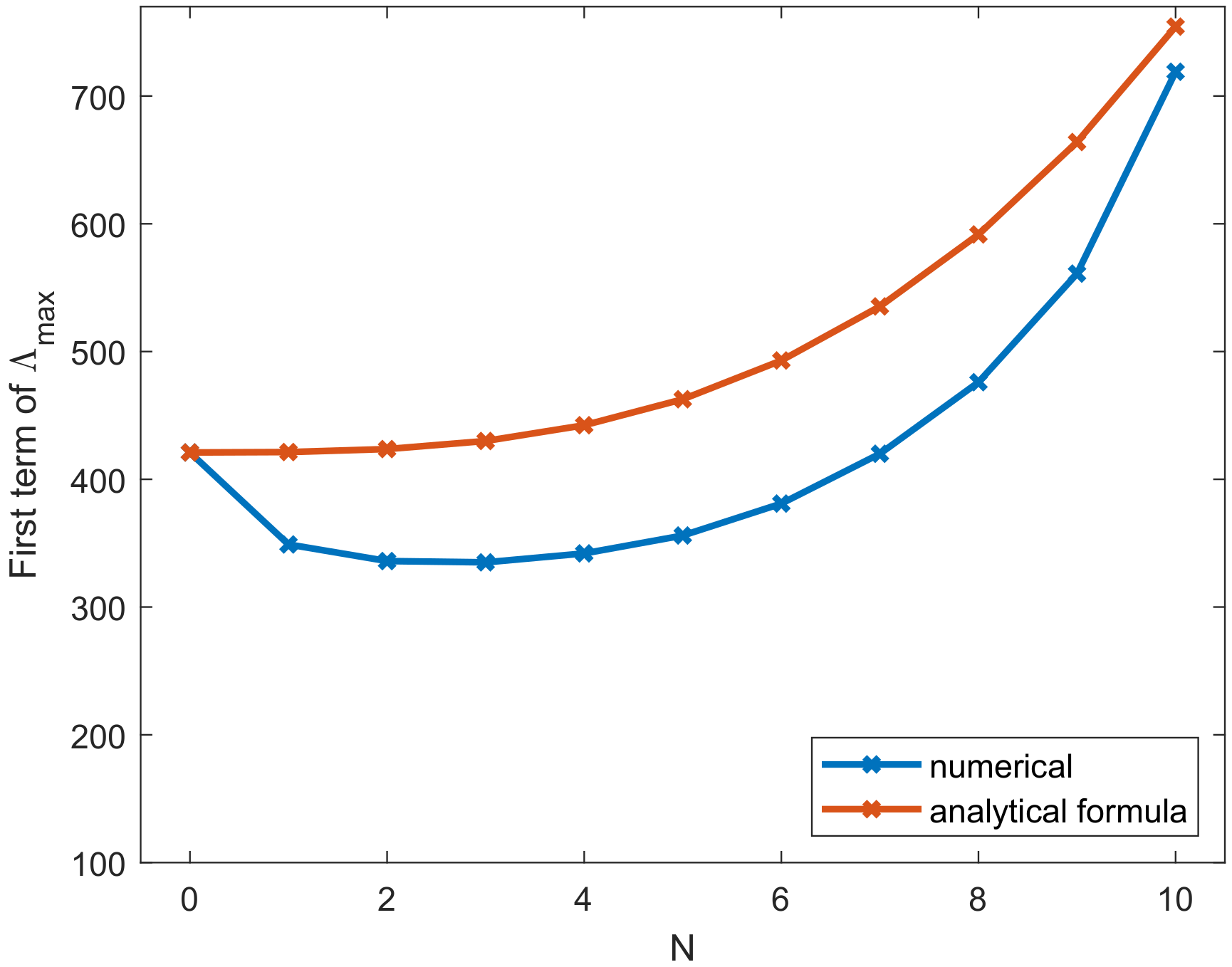
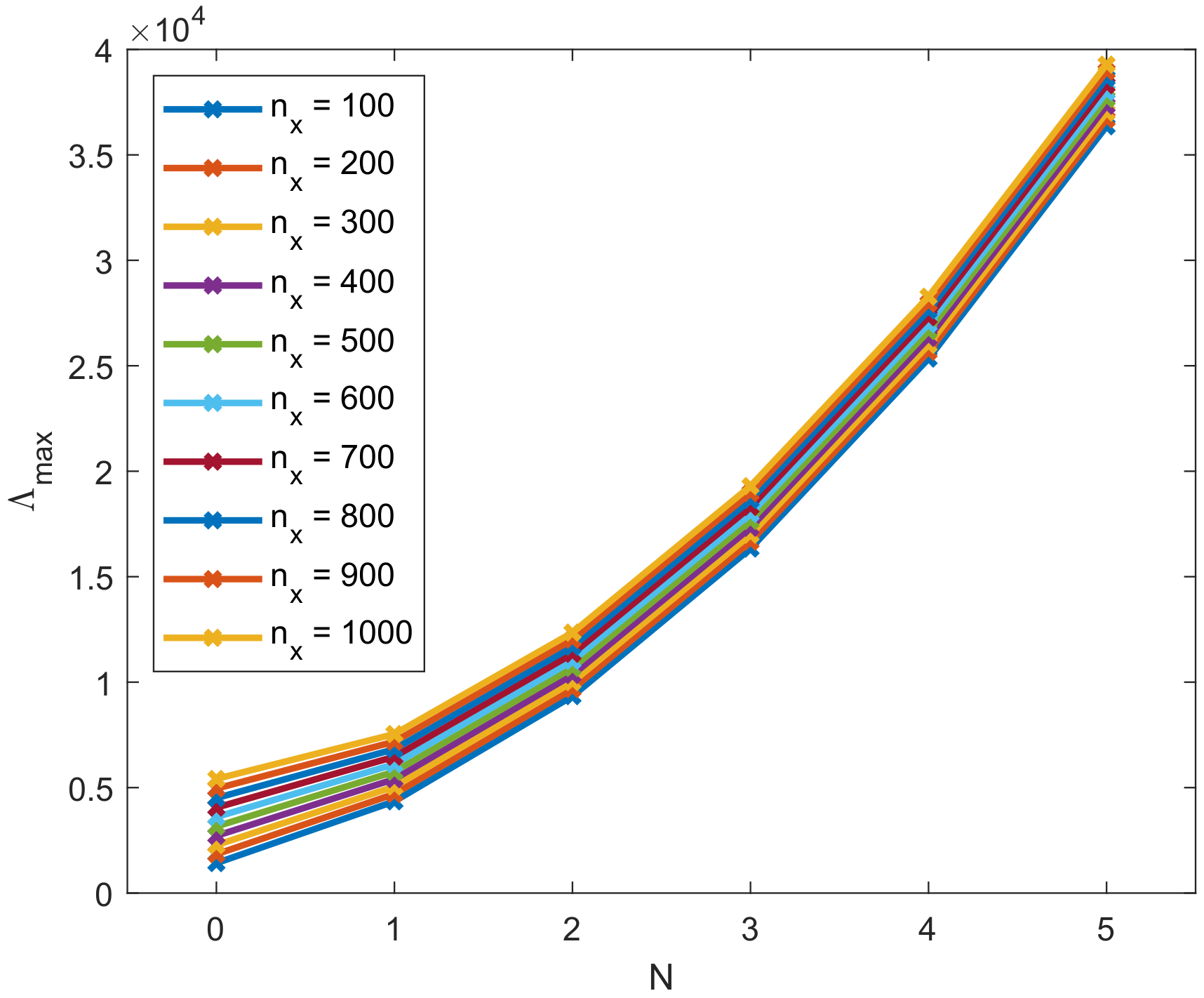
Figure 7 shows the values of
for varying
N and
. We first focus on a constant
to derive an approximation for
depending only on
N and then correct this formula by a factor for different
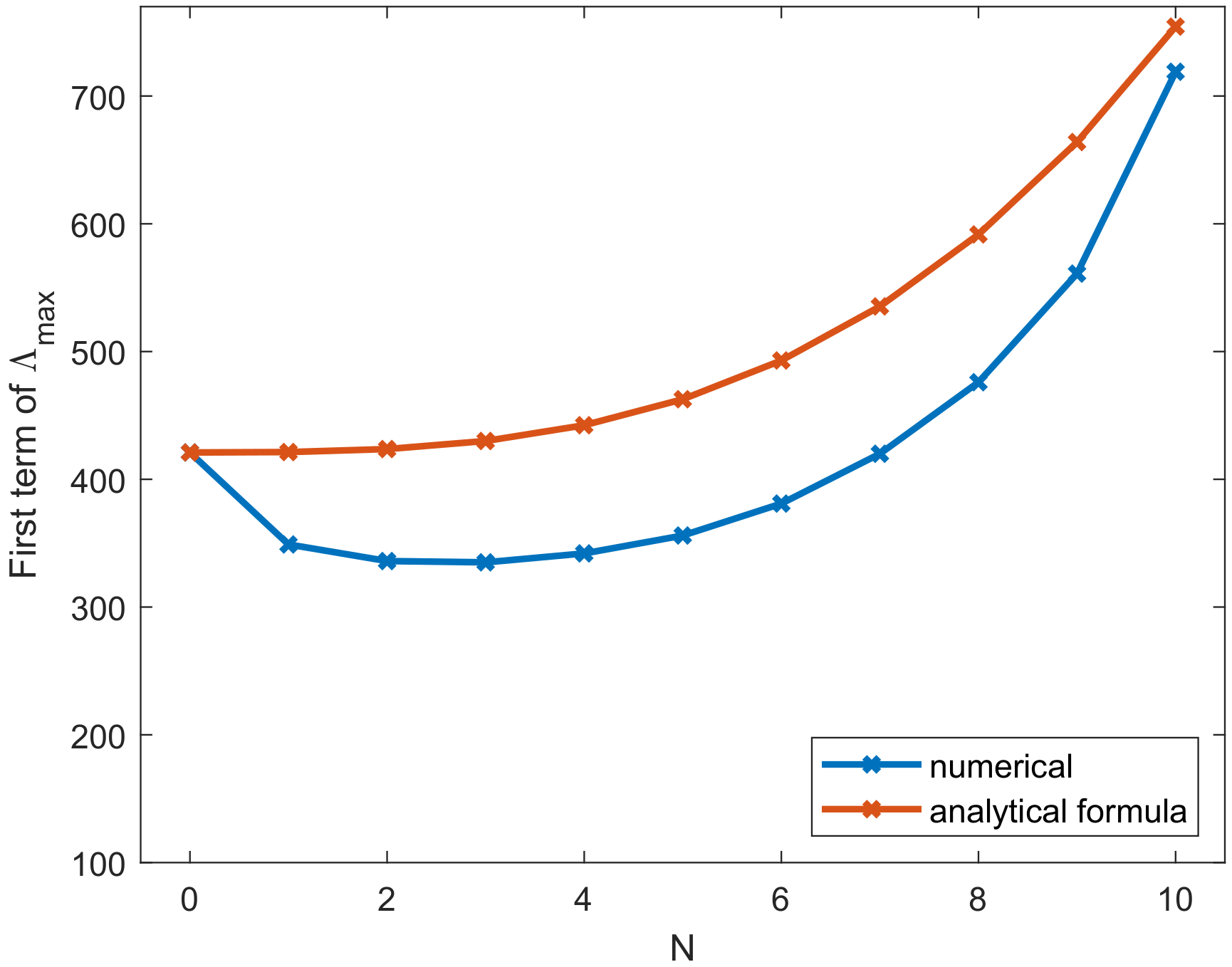
. In order to approximate the values for
, we fit a third order polynomial in
N. As a constraint, we ensure that the approximated values do not underestimate the numerically obtained values, which would lead to too large values for
and stability problems later. Based on that, we obtain the term
, which approximates the dependency of
on
N for constant
with increasing accuracy, as seen in
Figure 8.
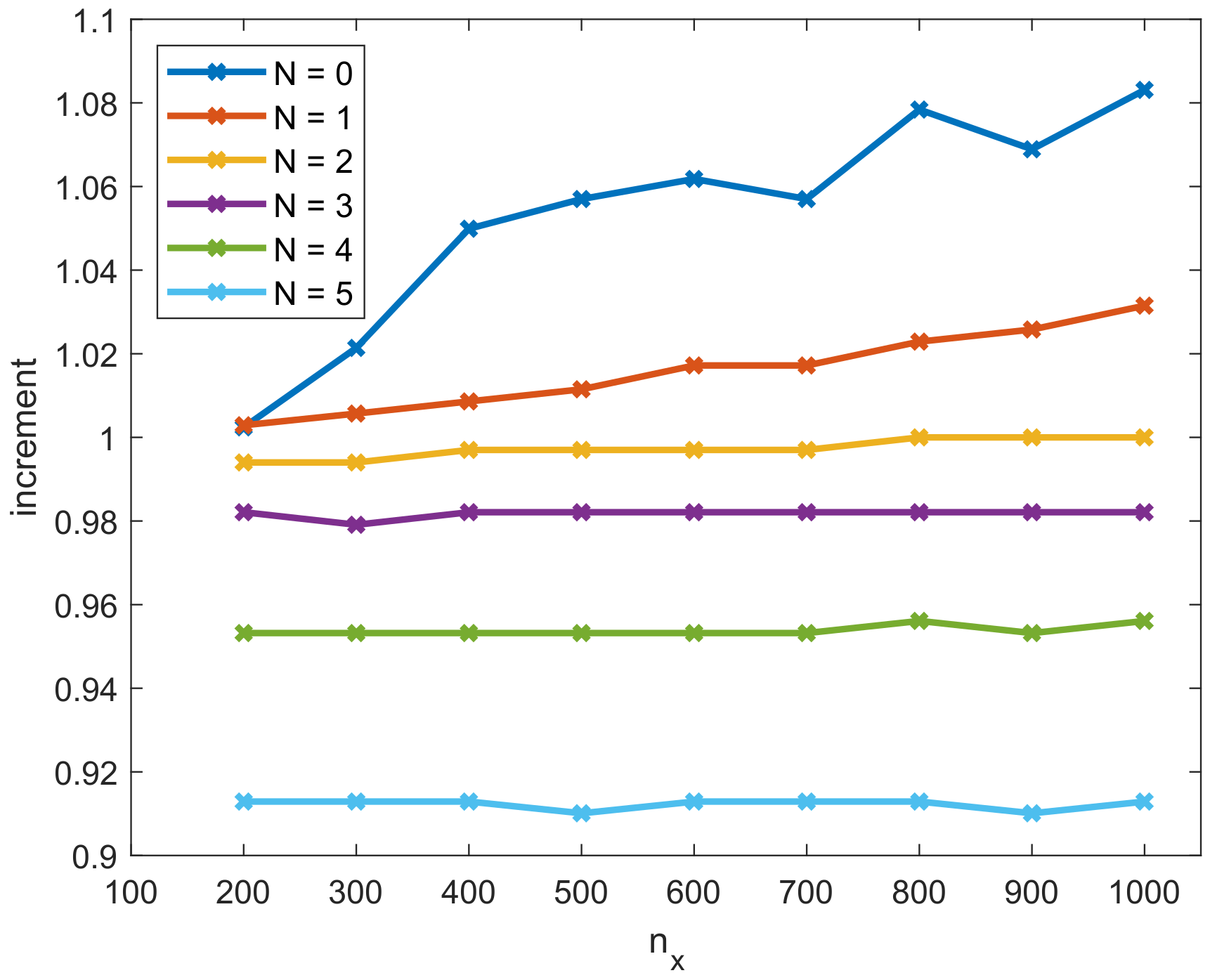
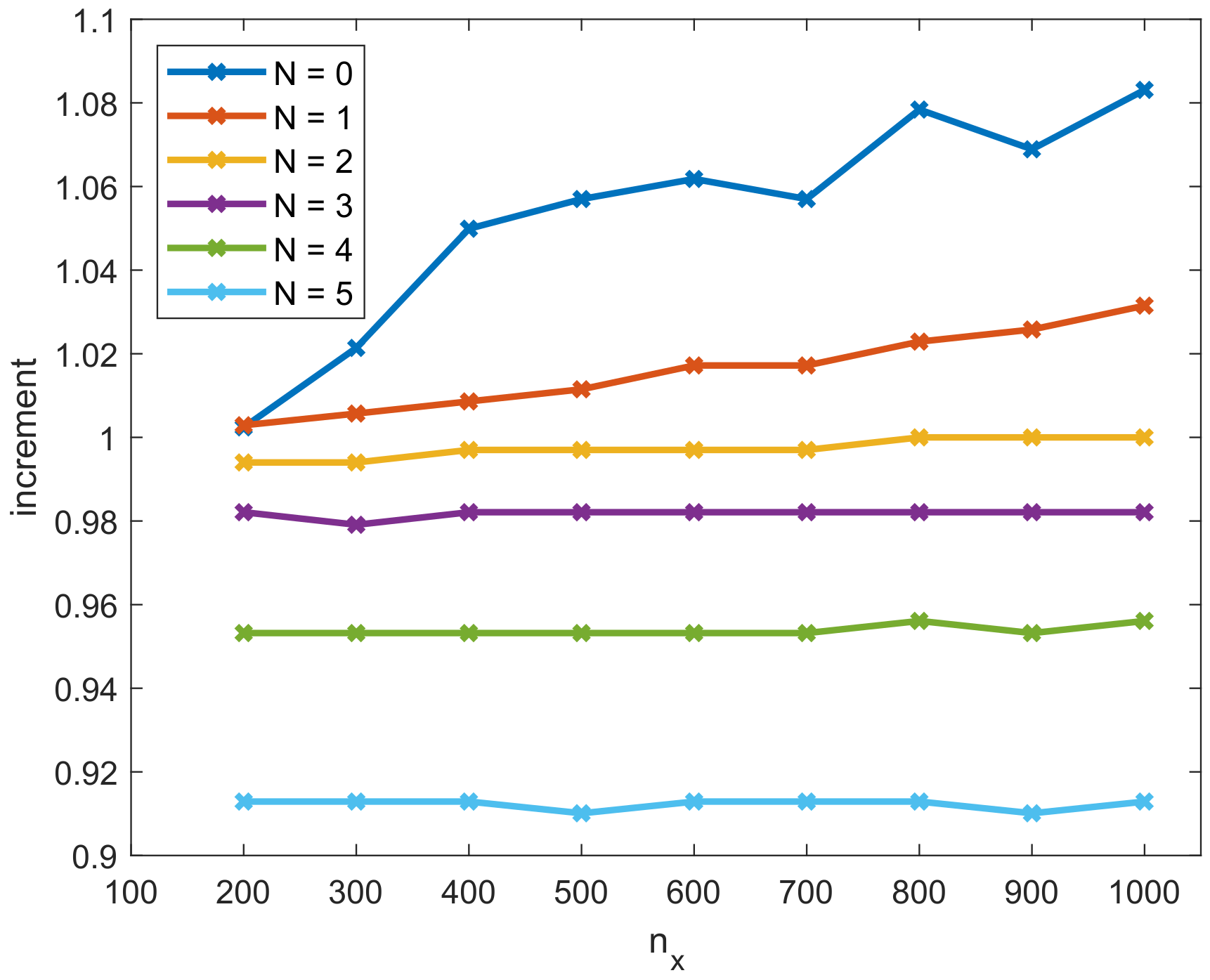
What remains is to correct for different spatial discretizations
. We do this by using a correction factor, which increments the value obtained for
. For maximal accuracy, we allow the correction factor, the so-called increment, to depend on
N besides
. In
Figure 9, the numerical value of the increment depending on
and
N is given, based on the numerical computation of the spectrum and the data in
Table A4. As expected, the values for small
N and
are close to one, as almost no correction is necessary. For larger values
N and
, a larger correction is necessary. Additionally, the influence of
N seems to be larger than the influence of
. Modeling a small linear dependence on
and a quadratic dependence on
N, we obtain
for the increment, which directly results in Equation (
29).
In summary, Equation (
29) thus approximates the fastest eigenvalue
for the dam break test case and can be used to determine the time step size of the inner integrator by
.
For the smooth periodic wave test case, a similar procedure results in the following formula for the fastest eigenvalue
. We leave out the details and give the final result here.
Note that the dependence of the fastest eigenvalue on N, , and is exactly the same for the dam break test case and for the smooth periodic wave test case. Only the leading term changes slightly. This is due to the different initial conditions used in the test cases. However, as the hyperbolic shallow water moment models are balance laws including conservation of mass, no new maximal values inside the computational domain are expected during the simulations such that the fastest eigenvalue is not expected to exceed this value.
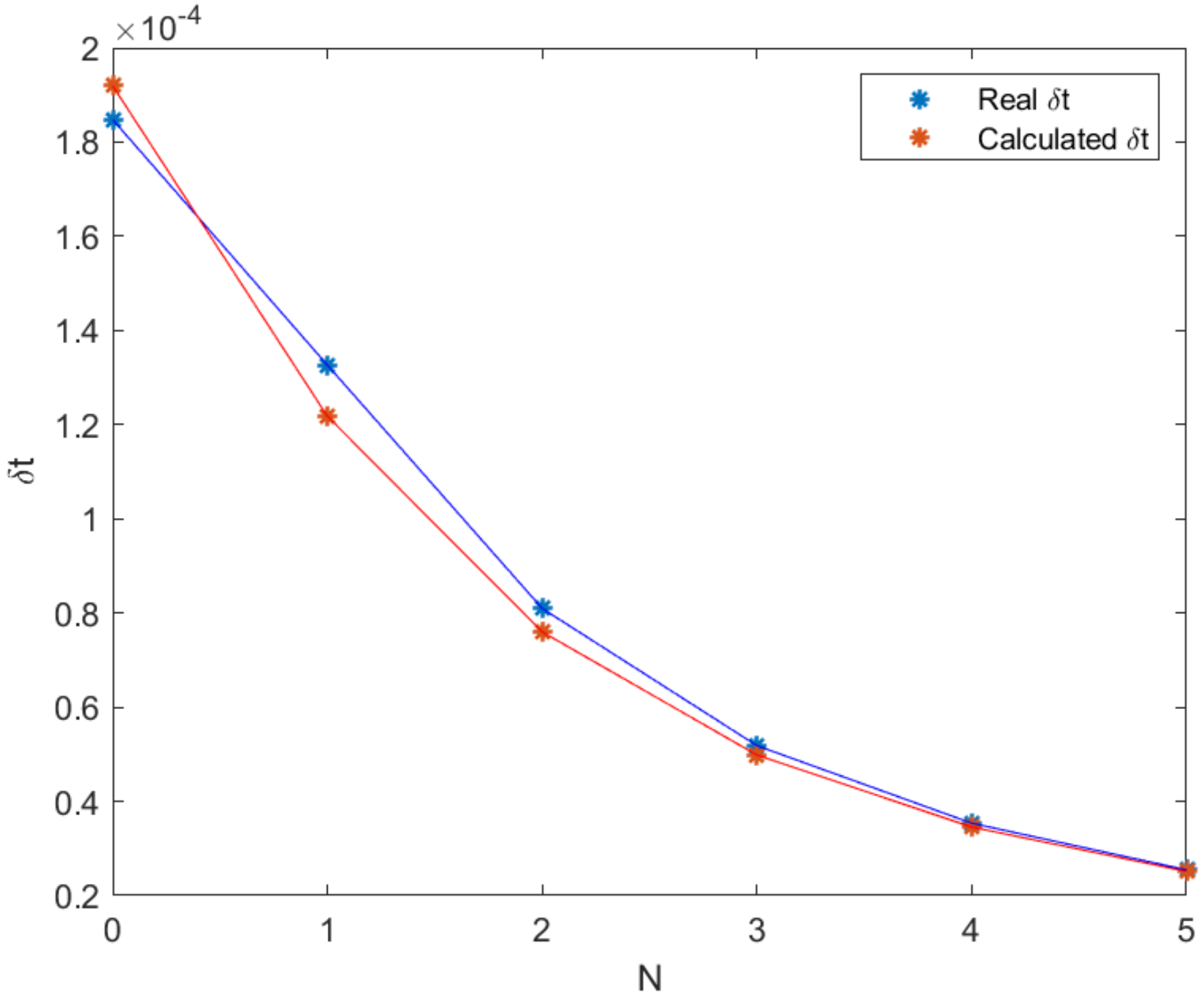
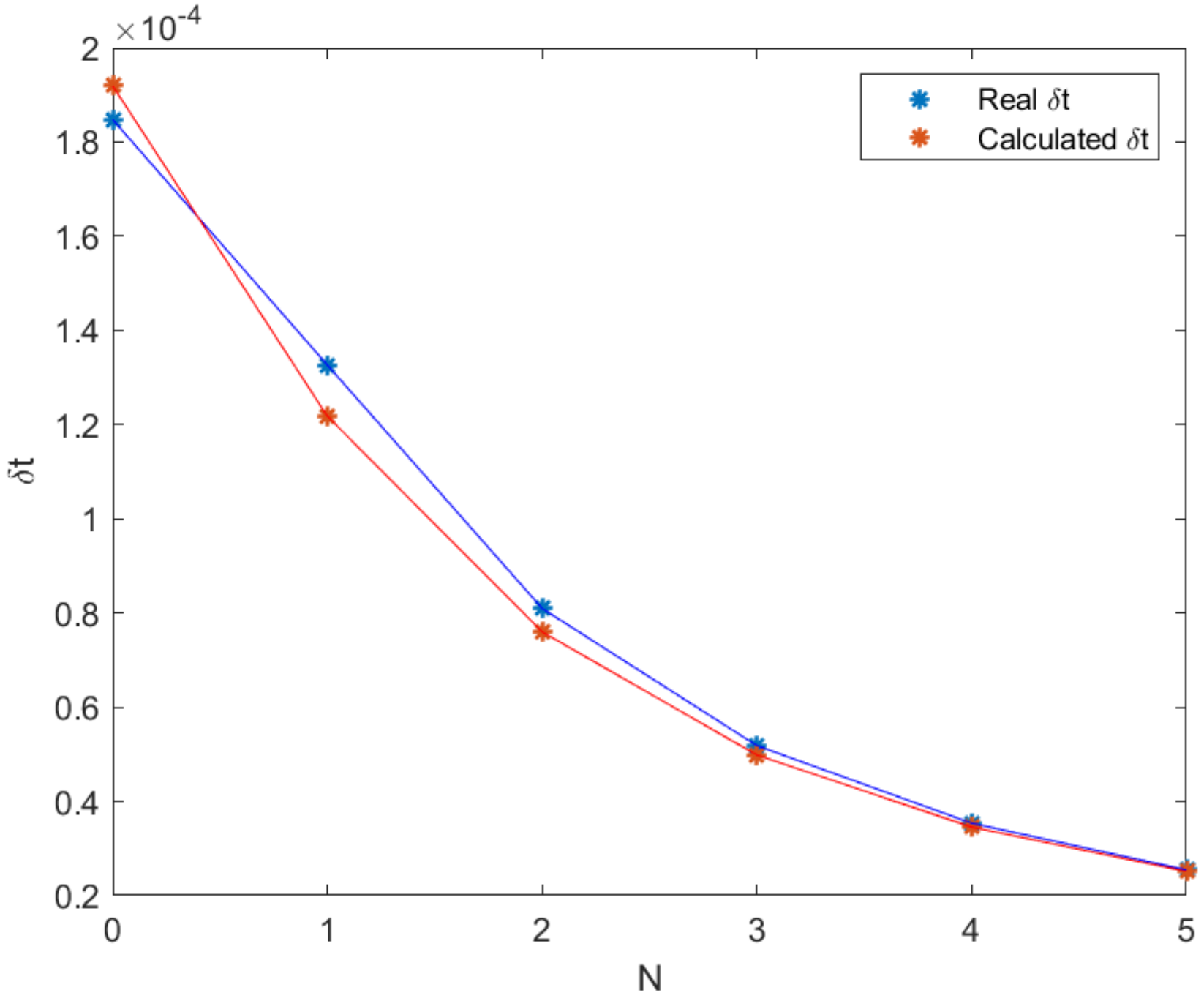
With the numerical results, we also show that the error between the approximated parameter choice for
and the stability limit for
based on the numerical spectrum, is small, see Table 4 for the dam break test case and Table 10 for the smooth periodic wave. The approximation formulas Equations (
29) and (
31) are thus effective at computing the inner time step of the PFE method.
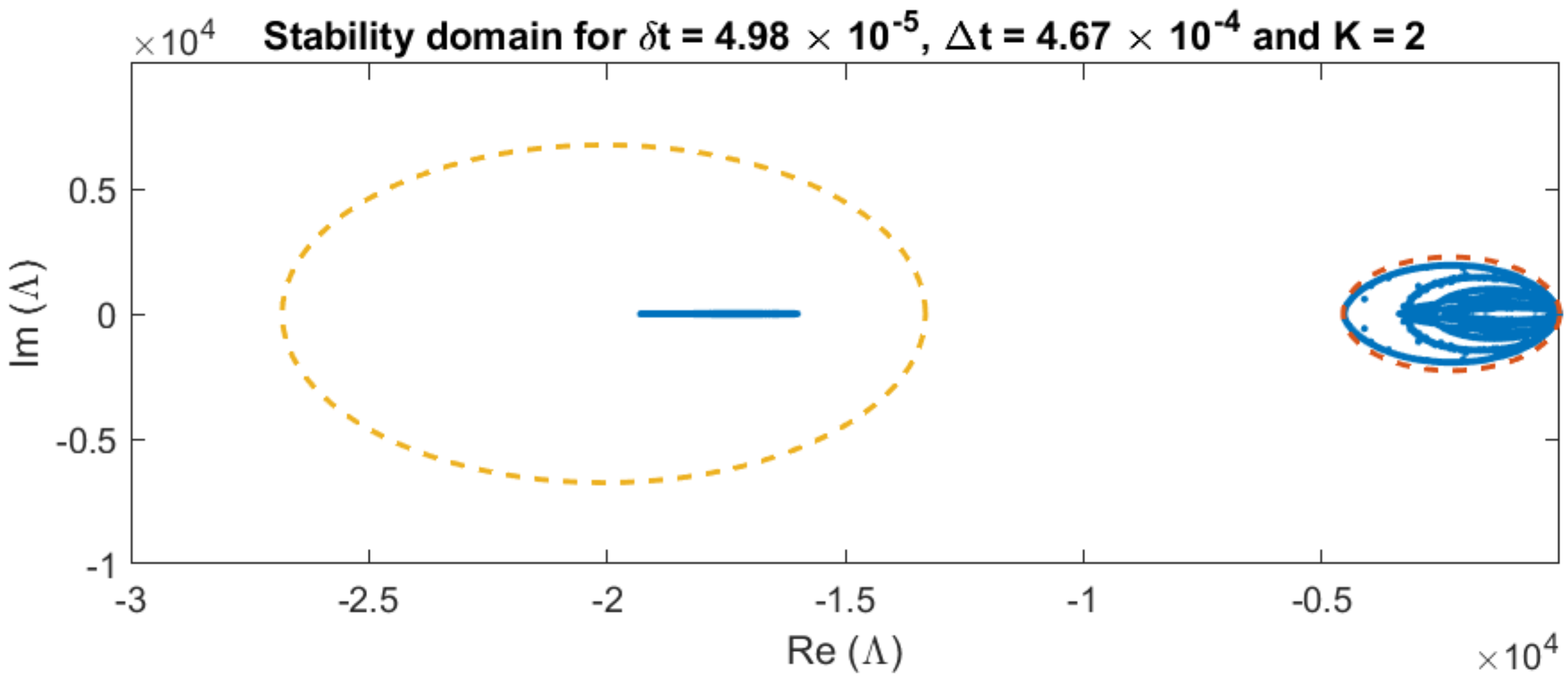
4.3.3. Stability Check of PFE Method
In order to check the stability of the PFE method using the previously derived parameters, we consider a typical test case and plot the stability region of the PFE method together with the numerically obtained eigenvalue spectrum. If all eigenvalues lie inside the stability region, the PFE method will result in a stable solution.
According to [
10], the stability domain of the PFE method is characterized by
and this stability condition [
10] is satisfied for all eigenvalues
that fulfill
where
denotes the disc with center
and radius
r in the complex plane.
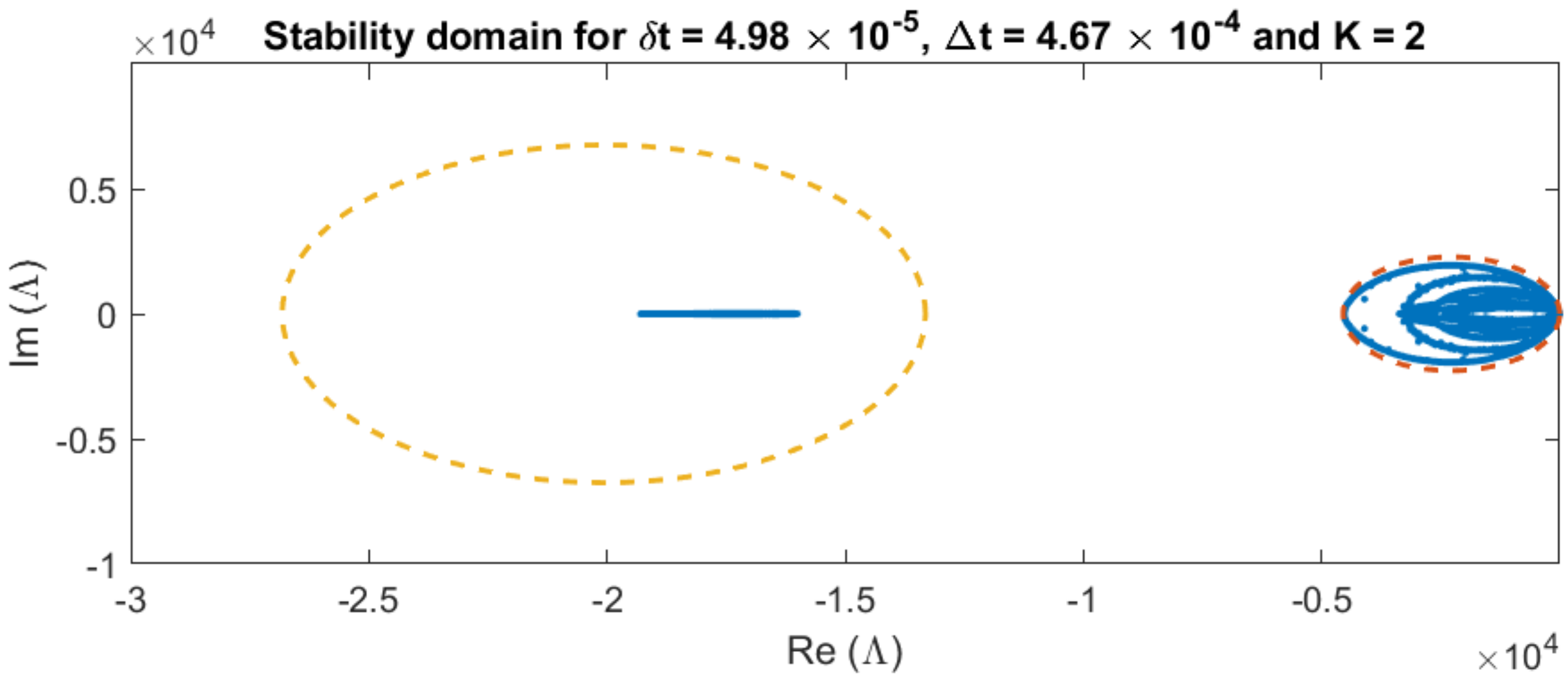
Considering the dam break test case with slip length
, friction coefficient
, spatial resolution
and
moments, the parameters of the PFE method are computed according to the aforementioned stability analysis as
and
. Additionally, we use a standard
. The eigenvalue spectrum of the test case is plotted together with the stability region of the PFE method in
Figure 10.
Figure 10 shows that both the fast and the slow eigenvalue clusters lie inside the stability domain, the PFE method with the chosen parameters is thus stable. Comparable results are obtained for the smooth periodic wave test case.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}