
Stability and Hopf Bifurcation Analysis of a Stage-Structured Predator–Prey Model with Delay


{kind=link}
{kind=link}
Abstract
1. Introduction
2. The Model
3. Permanence of System (3)
4. Stability of Equilibria
5. Existence of Hopf Bifurcation
6. Direction and Stability of the Hopf Bifurcation
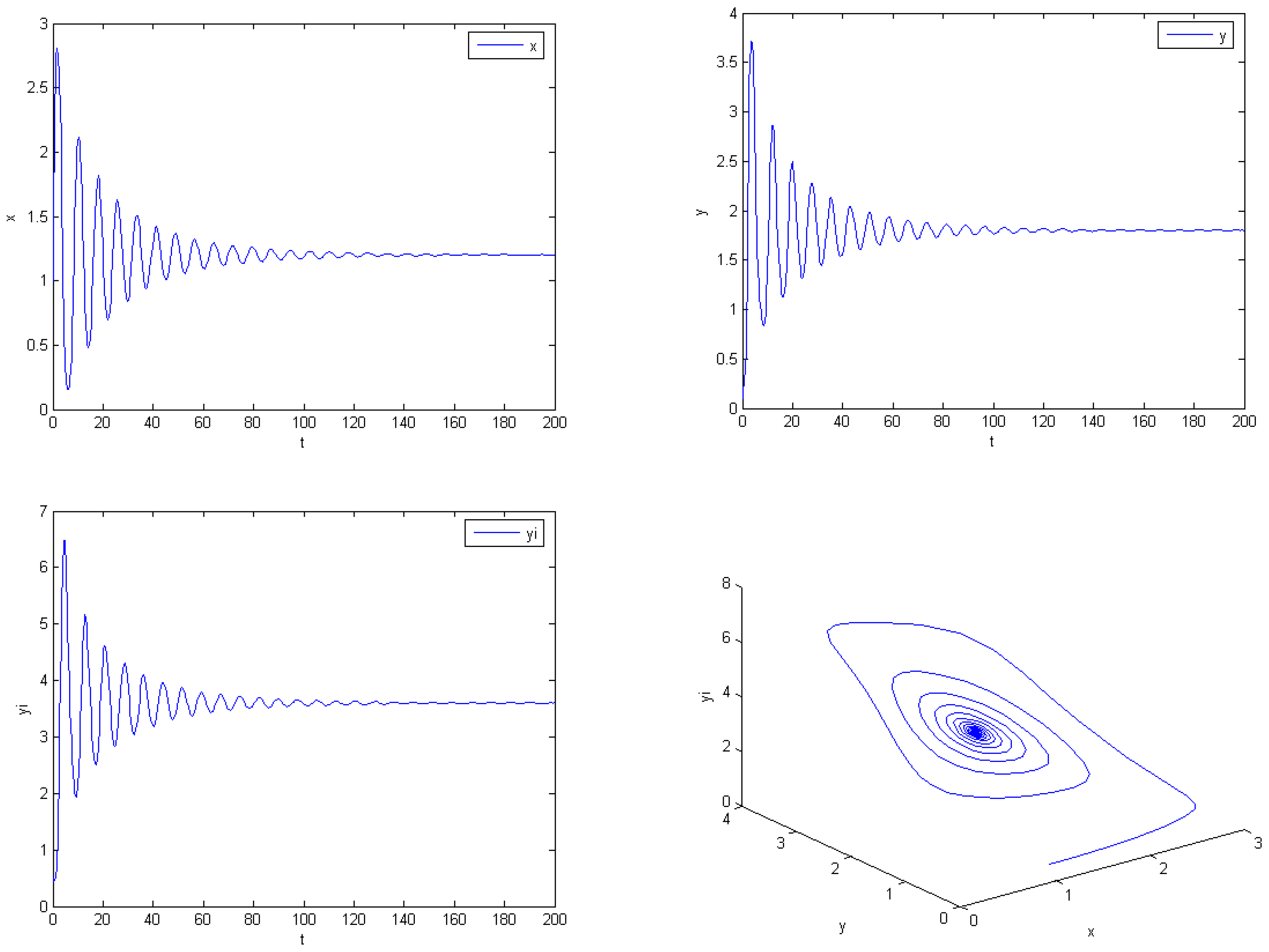
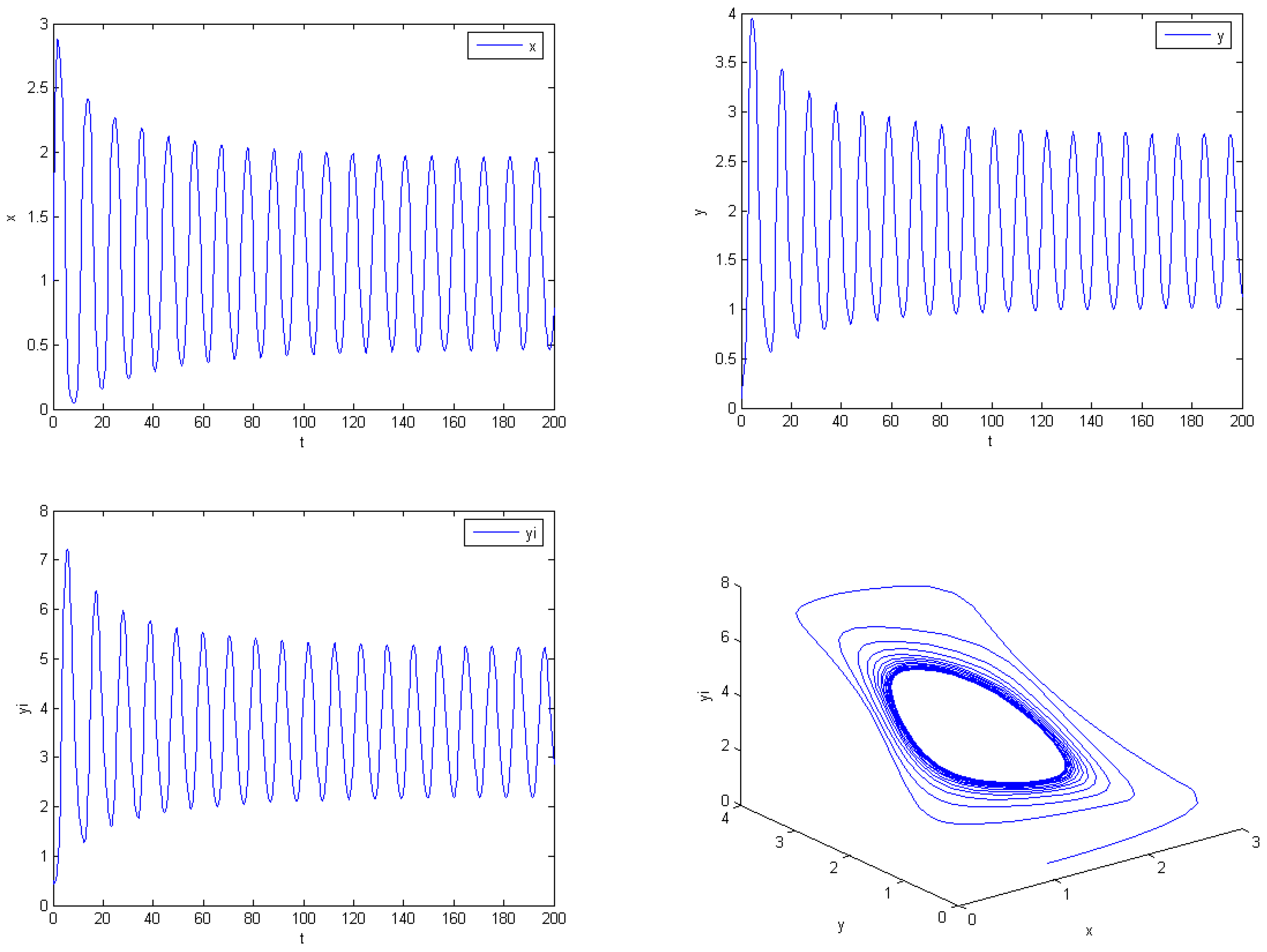
7. Numerical Simulations
8. Discussion
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Conejero, J.A.; Murillo-Arcila, M.; Seoane, J.M.; Seoane-Sepúlveda, J.B. When Does Chaos Appear While Driving? Learning Dynamical Systems via Car-Following Models. Math. Mag. 2022, 95, 302–313. [Google Scholar] [CrossRef]
- Zhou, X.; Shi, X.; Wei, M. Dynamical behavior and optimal control of a stochastic mathe-matical model for cholera. Chaos Solitons Fractals 2022, 156, 111854. [Google Scholar] [CrossRef]
- Owolabi, K.M. Computational dynamics of predator–prey model with the power-law k-ernel. Results Phys. 2021, 21, 103810. [Google Scholar] [CrossRef]
- Cao, Y.; Alamri, S.; Rajhi, A.A.; Anqi, A.E.; Riaz, M.B.; Elagan, S.K.; Jawa, T.M. A novel piece-wise approach to modeling interactions in a food web model Author links open overlay panel. Results Phys. 2021, 31, 104951. [Google Scholar] [CrossRef]
- Das, B.K.; Sahoo, D.; Samanta, G.P. Impact of fear in a delay-induced predator–prey system with intraspecific competition within predator species. Math. Comput. Simul. 2022, 191, 134–156. [Google Scholar] [CrossRef]
- Liu, Q.; Jiang, D.; Hayat, T. Dynamics of stochastic predator-prey models with distributed delay and stage structure for prey. Int. J. Biomath. 2021, 14, 2150020. [Google Scholar] [CrossRef]
- Alsakaji, H.J.; Kundu, S.; Rihan, F.A. Delay differential model of one-predator two-prey system with Monod-Haldane and holling type II functional responses. Appl. Math. Comput. 2021, 397, 125919. [Google Scholar] [CrossRef]
- Yousef, F.; Semmar, B.; Al Nasr, K. Dynamics and simulations of discretized Caputo-conformable fractional-order Lotka-Volterra models. Nonlinear Eng. 2022, 11, 100–111. [Google Scholar] [CrossRef]
- Yousef, F.; Semmar, B.; Al Nasr, K. Incommensurate conformable-type three-dimensional Lotka–Volterra model: Discretization, stability, and bifurcation. Arab. J. Basic Appl. Sci. 2022, 29, 113–120. [Google Scholar] [CrossRef]
- Chen, L.S.; Song, X.Y.; Lu, Z.Y. Mathematica Models and Methods in Ecology; Sichuan Science and Technology: Chengdu, China, 2003. (In Chinese) [Google Scholar]
- He, X.Z. The Lyapunov functionals for delay Lotka Volterra type models. SIAM J. Appl. Math. 1998, 58, 1222–1236. [Google Scholar] [CrossRef]
- Gopalsamy, K.; He, X.Z. Global stability in n-species competition modelled by “pure-delay type” systems II: Nonautonomous case. Can. Appl. Math. Q. 1998, 6, 17–43. [Google Scholar]
- He, X.Z. Global stability in nonautonomous Lotka–Volterra systems of “pure-delay type”. Differ. Integral Equations 1998, 11, 293–310. [Google Scholar]
- Wang, W.D.; Ma, Z.E. Harmless delays for uniform peristence. J. Math. Anal. Appl. 1991, 158, 256–268. [Google Scholar]
- Cui, J.A.; Chen, L.S.; Wang, W.D. The effect of dispersal on population growth with stage- structure. Comput. Appl. Math. 2000, 39, 91–102. [Google Scholar] [CrossRef]
- Song, X.Y.; Cui, J.A. The Stage-structured predator–prey System with Delay and Harvesting. Appl. Anal. 2002, 81, 1127–1142. [Google Scholar] [CrossRef]
- Aiello, W.G.; Freedman, H. A time-delay model of single-species growth with stage structure. Math. Biosci. 1990, 101, 139–153. [Google Scholar] [CrossRef]
- Cao, Y.; Fan, J.; Gard, T.C. The effects of state-dependent time delay on a stage-structured population growth model. Nonlinear Anal. Theory Methods Appl. 1992, 19, 95–105. [Google Scholar] [CrossRef]
- Walter, W. Ordinary Differential Equations. Graduate Texts in Mathematics; Springer: Now York, NY, USA, 1998; Volume 18. [Google Scholar]
- Hale, J.K.; Waltman, P. Persistence in inffnite-dimensional systems. SIAM J. Math. Anal. 1989, 20, 388–396. [Google Scholar] [CrossRef]
- Kuang, Y. Delay Differential Equations with Applications in Population Dynamics; Academic Press: London, UK, 2004. [Google Scholar]
- Hassard, B.D.; Kazarini, N.D.; Wan, Y.H. Theory and Application of Hopf Bifurcation; London Mathematical Society Lecture Note Series, 41; Cambridge University Press: Cambridge, UK, 1981. [Google Scholar]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, X. Stability and Hopf Bifurcation Analysis of a Stage-Structured Predator–Prey Model with Delay. Axioms 2022, 11, 575. https://doi.org/10.3390/axioms11100575
Zhou X. Stability and Hopf Bifurcation Analysis of a Stage-Structured Predator–Prey Model with Delay. Axioms. 2022; 11(10):575. https://doi.org/10.3390/axioms11100575
Chicago/Turabian StyleZhou, Xueyong. 2022. "Stability and Hopf Bifurcation Analysis of a Stage-Structured Predator–Prey Model with Delay" Axioms 11, no. 10: 575. https://doi.org/10.3390/axioms11100575
APA StyleZhou, X. (2022). Stability and Hopf Bifurcation Analysis of a Stage-Structured Predator–Prey Model with Delay. Axioms, 11(10), 575. https://doi.org/10.3390/axioms11100575