1. Introduction
The use of numerical integration methods manifests itself in various aspects of computation related to many problems of functional analysis, numerical solutions of differential and integral equations and their applications. In particular, the Gaussian quadrature rules considered in the monographs [
1,
2] are used in the analysis of the influence of numerical integration methods on the accuracy of solutions to various equations. As some examples, let us refer to fractional differential equations with a nonsingular Mittag–Leffler kernel [
3], second-kind fuzzy Fredholm integral equations [
4], variational equations [
5,
6] and second-order elliptic equations solved using non-parametric nonconforming quadrilateral elements [
7].
In all the publications mentioned above, the Gaussian quadrature rules demonstrate their usefulness over other numerical integration methods in providing better approximation quality. In [
8], this conclusion was confirmed for the finite element method based on the analysis of the dependence of the approximation quality on the numerical integration methods used. Similar dependencies were also studied in [
9] for the
p-version of finite elements and in [
10] in connection with the approximation of eigenvalues. Later in [
10,
11], the above dependencies were discussed in the problem of approximation of linear functionals and approximation of eigenvalues.
As in the approaches mentioned above, the main attention in the proposed study is paid to the analysis of the effects of numerical integration in the calculation of the components of the fuzzy (
F-)transforms of higher degrees. The importance of this seemingly narrow problem stems from the fact that the theory of
F-transforms is regarded as a methodology for fuzzy functional analysis. The latter has become important with numerous applications in integral and differential calculus, image processing and computer vision, time series analysis, and neural network computing, see [
12] and the references therein.
An extended view of this study shows its importance for any calculation of weighted projections of functional objects (images, signals, etc.) on an appropriate orthogonal basis, which may consist of eigenfunctions of various integral operators. This increases the value of the proposed results for the rapidly growing set of data-driven methodologies used in modern data analysis, now enriched with the
F-transform, and especially its more powerful higher degree version [
13].
Since the
F-transform method requires the calculation of weighted orthogonal projections (
F-transform components) onto orthogonal polynomials, it is important to reduce its complexity. Therefore, the main technical focus of this study is devoted to efficient and easy-to-implement methods of numerical integration. In addition, we will focus on three-point and four-point quadrature rules because it is generally not true that a quadrature formula with a large number of integration points guarantees optimal convergence [
1,
7].
To calculate the components of the
-transform of a higher degree,
, the two-point Gaussian quadrature rules were first used in [
14]. There we proposed an approximate analytical expression for the
-transform components.
In the current paper, we extend the applicability of these rules to -transforms, where . For general weight functions and their special triangular-shaped forms, exact analytic expressions are found for the integration points and the weights , where . This allows us to explicitly write the N-point quadrature Gauss formulas for and obtain exact expressions for the integrals of polynomial integrands up to degree 7. In combination with the inverse F-transform, this result significantly reduces the computational complexity of various approximations based on analytic expressions for the inverse F-transform. The constraint, offset by the corresponding number of fuzzy partition elements, guarantees that the inverse F-transform easily controls the quality of the approximation.
As an advantage of this approach, we show that low degree polynomials combined with a dense fuzzy partition provide comparable quality and lower computational complexity compared to high degree polynomial approximations over the entire domain. Another advantage is that the quadrature rule in its analytic form with local polynomial approximation based on the
F-transform can be used as a technical step in an operational method [
4] for solving (fuzzy) integral and differential equations.
Summing up, we can say that this article contributes and innovates two areas: approximation theory based on higher degree F-transforms and numerical methods of integration. In the second mentioned area, we give direct descriptions of integration points and weights for N-point Gaussian quadrature formulas, , with an arbitrary positive weight function, and obtain exact expressions for integrals of (weighted) polynomials as integrands up to the degree 7. In the first direction, direct analytic expressions are proposed for the inverse -transforms with , where the latter include only arithmetic operations. This significantly reduces the computational complexity of this method (based on the integral F-transform) by eliminating the need for numerical integration.
The paper has the following structure: In
Section 2, we give preliminaries related to the Gaussian quadrature formulas and the higher degree
-transforms. In
Section 3, we formulate and give the technical details of our main result on 3- and 4-point Gaussian quadrature rules, where the weight function is the membership function of a fuzzy partition element. In
Section 4, we define the 3- and 4-point Gauss quadrature rules for the particular weight function with a triangular shape.
Finally, in
Section 6, on various numerical tests, we show the usefulness of the Gauss quadrature rules proposed here for calculating the components of the (direct and inverse)
-transform (
) and numerical integration.
2. Preliminaries
Below, we give a brief overview of the development of quadrature rules for numerical integration. Scientific research in this area is still in demand due to the many new forms of differential and integral calculus, including fuzzy and various fractional versions, see [
3,
4,
5,
6,
7,
9,
11] and citations therein. Without going into numerous details, we recall the main facts related to the Gaussian quadrature rules [
15,
16,
17,
18,
19] and show the most stable trends in their use.
The
N-point Gaussian quadrature rule of the form (
1) is a numerical integration rule that gives an exact result for polynomials of degree
or less with an appropriate choice of integration points
and weights
, where
, see e.g., [
1,
19]. Generalized formulation
where
is a weight function, was developed by Carl Gustav Jacobi in 1826. The choice of
affects the choice of integration points
and weights
, so if
are
-weighted orthogonal polynomials with degrees corresponding to their indices, then
are the roots of
. The weights
are found using the property that (
1) is exact for polynomials of degree
or less. Moreover, if the weight function
is symmetric with respect to the central point
, then the roots are symmetric with respect to this point, and the weights satisfy the condition:
. These two properties halve the computational complexity.
Depending on the choice of the weight function
, Gaussian quadrature rules are given by the names of their authors, see [
15,
18]. The most famous are Gauss–Legendre (
), Gauss–Jacobi (
,
) and Chebyshev–Gauss quadrature rules (
) considered on the interval
. There are many algorithms for computing integration points
and weights
of Gaussian quadrature rules. The most popular are the Golub–Welsh algorithm [
19] requiring O(
) operations, Newton’s method for solving
, requiring O(
) operations, and asymptotic formulas for large
N, requiring O(
n) operations.
In this study, we develop quadrature Gaussian rules where the weight functions are the membership functions
of an
h-uniform fuzzy partition, and the corresponding orthogonal polynomials are defined as in [
14]. The original idea was proposed in [
14]. In this article, the 2-point Gaussian quadrature formula was found and applied to calculate the components of the
-transform. Based on the approach proposed in [
14], we develop 3- and 4-point Gaussian quadrature formulas and use them to calculate the components of
-transformations, where
.
2.1. Fuzzy Partition
The notion of fuzzy partition has been evolved in the theory of fuzzy sets being adjusted to various requests to a space structure. The closest form to that which we use in this paper has been introduced in [
20].
Definition 1 (Fuzzy partition). Let be an interval on , , and let , , …, , be nodes such that . We say that fuzzy sets , which are identified with their membership functions, constitute a fuzzy partition of if for , they fulfill the following conditions:
Normality: ;
Locality: if ;
Continuity: is continuous on ;
Positiveness on support: if ;
Ruspini condition: , .
The membership functions are called basic functions.
We say that the fuzzy partition , , is h-uniform
, where , if nodes are h-equidistant, i.e., , , and there exists an even function such that , and for all ,We call a generating function
of the uniform fuzzy partition. Below, we introduce a set of Hilbert spaces, each of which is defined by a set of square-integrable functions on the corresponding element of the fuzzy partition and the basic function associated with it. We use the notation [
14].
Let us fix
and its fuzzy partition
. Let
k be a fixed integer from
,
a basic function and
a set of square-integrable functions
. Denote
as a set of functions
, such that
Let us recall [
14], and denote the
inner product of
f and
g in
as
and the corresponding
norm as
We remind that the functions f and g are orthogonal in if .
By [
14],
together with the inner product (
3) is a Hilbert space. Let
k be a fixed integer from
, and let
,
, be a linearly independent system of polynomials, restricted to the support of
and translated to the new origin
. Let us apply the Gram–Schmidt orthogonalization to the system
and convert it to the orthogonal polynomials
such that, for
,
where
, and
,
.
Remark 1. It is easy to see that for all ; and , Example 1. Let us give an example of the first five orthogonal polynomials in , where is some fixed generating function and is the corresponding inner product:Above, we have made use of the following notation: 2.2. -Transform
In this section, we repeat definitions of the direct and inverse
-transform as they appeared in [
14]. Let
k be a fixed integer from
and
be a linear subspace of
spanned by
. It is easy to see that
consists of all polynomials of degree
restricted to the support of
. Moreover,
Definition 2. Let be a function from , and let be a fixed integer. Denote as the k-th orthogonal projection of on , . We say that the -tuple is an -transform of f with respect to , or formally, is called the k-th -transform component of f. In [
14], it was proved that
where
for
.
An inverse -transform of a function f is defined as a linear combination of basic functions with “coefficients” given by the -transform components.
Definition 3. Let be a given function, , and let be the -transform of f with respect to full fuzzy sets in the partition . Then, the following function is called the inverse
-transform
of f with respect to and . In general, the inverse
-transform of
is different from
f. However for
, it approximates
f with the following quality estimate [
14]:
where the
h-uniform partition
of
fulfills the Ruspini condition on
, and functions
f and
,
are four times continuously differentiable on
.
2.3. The Quadrature Formula
To calculate the components of the
-transform of a higher degree,
, it is necessary to compute a number of definite integrals given in (
8). At least half of them are integrals of weighted polynomials, and other are integrals of functions with the same weight. For their precise and approximate computation, we propose to use Gaussian quadrature rules (
1) specified by basic functions of the corresponding fuzzy partition. This idea was firstly used in [
14] for the computation of the
-transform components. In the current paper, we extend the applicability of these rules to
-transforms, where
.
Let us fix and its h-uniform fuzzy partition . Let k be a fixed integer from , a basic function, and a set of square-integrable functions .
Definition 4 ([
14]).
The N-point Gaussian quadrature rule of the form (1) with the weight function has the form The integration points
and weights
,
, are assumed to be chosen so that (
11) is exact for all polynomials of the highest possible degree.
Lemma 1 ([
14]).
If are roots of the polynomial andholds true for all polynomials of degrees and some coefficients , then (12) holds true for all polynomials of degree . Remark 2. In the proposed contribution, we are looking for quadrature formulas that are exact for all polynomials of degrees 4 and 6, respectively. By lemma 1 we see that the values and , respectively, are suitable for this purpose.
3. Main Results
In this section, we will discuss how to construct 3- and 4-Gaussian quadrature formulas with the membership function
as a weight function. We will discuss 3- and 4-quadrature formulas in the two subsequent subsections separately. Then we will show how to use these results and obtain exact analytical expressions for the denominators of components
and
given in (
8), where
. This becomes possible because their integrands are polynomials of the fourth and sixth degrees respectively so that the proposed 3- and 4- Gaussian quadrature rules are exact for these polynomials.
Assume that interval has an h-uniform fuzzy partition which will be fixed throughout this section. Since the domains of membership functions and are only half size of domains of other membership functions, we will consider two separate cases:
- (i)
Regular, when .
- (ii)
Boundary, when .
Let us fix the value of
k,
, and make some useful notations
3.1. Domain Extension
In this subsection, we redefine the F-transform components for the boundary case (ii), i.e., for the case or . At first, we extend the given interval to , where h is a parameter of an h-uniform fuzzy partition.
Let us denote
and
as
Extend domains of
and
to
and
, respectively, and define (as in [
21])
The corresponding
inner products are defined in the same way as in (
3):
Similarly to Example 1, we apply the Gram–Schmidt orthogonalization and construct the orthogonal polynomials
and
as follows:
where
,
, and
,
,
.
Let () be a linear subspace of () spanned by (). It is easy to see that and have all properties of , .
Let us extend
to
(similar to [
21]), where
,
Obviously,
and
.
Definition 5. Let be a function from and be its extension to . Define the -transform components and similarly to Definition 2 and as follows:where for (as in (8)),The n-tuple is an extended -transform of with respect to the extended partition
, or formally, Accordingly, we extend the Definition 3 of the inverse
-transformat to the function
. By the quality estimate (
10), we have
where the
h-uniform partition
of
fulfills the Ruspini condition on
.
3.2. 3-Point Quadrature Rule with Weight Function
In this subsection, we find the parameters of the 3-point quadrature formula (
11) specified in Definition 4. By Lemma 1, this means to find the roots
of the polynomial
and the coefficients
, such that
is satisfied for all polynomials
of degree
.
By Example 1,
and it is orthogonal to
with respect to (
3). It is easy to see that the roofs of
are
Let us denote
First, consider the case when .
Lemma 2. For all polynomials of degree l, , the equalitywhere are specified in (24), holds true. Proof. Case 1: For
, we have
with
. Firstly, we compute the left side of (
25):
Case 2: For
, we have
with
. We compute the left side of (
25)
On the right hand side of (
25), we have
By the direct computation, we see that the left hand side of (
25) is equal to its right hand side:
Case 3: For
, we have
with
. At first, we rewrite
into
Then, the left hand side of (
25) becomes
Using
we easily come to
By (
27) and (
28),
Therefore, Equation (
25) holds true for all polynomials
of
□
Corollary 1. Let be an interval on , and be an h-uniform fuzzy partition of , and be arbitrary real numbers. Then Proof. Based on Equations (
26) and (
27). □
Corollary 2. The quadrature formula (25) holds true for all polynomials of degree . Now we consider the cases
and
where the 3-point quadrature rule (
11), specified by
, and parameters in (
23) and (
24), is used for a general
function including polynomials. Therefore, this rule gives an approxamate value of the corresponding integral.
Lemma 3. Let be arbitrary interval and is its h-uniform fuzzy partition. Let extend and as in (15) and (16), respectively. For any and its extension ,where are in (24). Proof. On the left hand side of (
29), we have
Equation (
30) can be proved similarly. □
Theorem 1. Let be the h-uniform fuzzy partition of an interval , and n-tuple is an the extended -transform of with respect to . Then for any , the calculation of the component of the -transform , wherecan be performed using approximate analytical expressions for the coefficients , based on the three-point quadrature rules (11) given by , and the parameters in (23) and (24). Specifically, Proof. First of all, we note that an exact analytical estimate of the denominators in the expressions for
was proved in [
14]. Therefore, we will focus on the calculation of
, the general expression of which is given in (
8).
We begin with the estimation of
and
. Using Lemma 2 and Theorem 4 in [
14], we have
Therefore, for
, the denominator of
is
Obviously, the denominators of
and
Apply the Formulas (
29) and (
30) to calculate the numerators of the components, the theorem is proved. □
3.3. 4-Point Quadrature Rule with Weight Function
In this subsection, we construct the quadrature formula specified in Definition 4 where
. By Lemma 1, this means to find the roofs
of
and coefficients
that satisfy
for all polynomials
of degree
.
Firstly, let us start with finding the polynomial
. From exercise Ex.1, it follows that for all
, we have
Lemma 4. The equationhave two positive real distinct roofs. Proof. By the Cauchy–Schwarz inequality, we have
Assume the equality occurs. Then, for all
,
This is contradictory. Therefore, we have
Similarly, by the Cauchy–Schwarz inequality for
, we have
and the inequality is strict. Therefore, we have
Additionally, multiplying each side of the inequalities (
35) and (
36) respectively, we have
By inequalities (
35), (
36) and (
37), we have
Hence,
In next step, we prove that
. Since polynomials
and
are orthogonal, i.e.,
. Therefore,
There exists
such that
. Let us consider
It is clearly that
are minima of
. It means
Therefore,
From (
39) and (
38), by Viet theorem, Equation (
34) has two distinct positive roofs. □
Since Lemma 4,
has four distinct roofs. Let two positive real number
satisfy
Then, the integration points are the roofs of
where
Let us denote
where
and
are real numbers that satisfy
Now, we consider the case
. Let
k be a fixed integer from
.
Lemma 5. For all polynomials of the degree l, where ,where are in (42), holds true. Proof. Case 1: For
, we have
with
. At first, let us compute the left hand side of (
44):
Case 2: For
, we have
with
. Let us compute the values of
at the points
,
:
Then, the right hand side of (
44) has the form
Following Corollary 1, the left hand side of (
44) is equal to its left hand side in accordance with its formal expression
Case 3: For
we have
with
. Let us compute the values of
at the points
,
:
Then, on the right hand side of (
44), we have
Following Corollary 1, the left hand side of (
44) is equal to its right hand side in accordance with its formal expression
Case 4: For
, we have
with
. Let us compute the values of
at the points
,
,
Then, the right hand side of (
44) has the form
Then, we transform
to
The right hand side of (
44) is
By (
47), both sides of (
44) are equal, and we have
Therefore, Equation (
44) holds true for all polynomials
of
□
Corollary 3. The quadrature formula (44) holds true for all polynomials of degree . Now we consider the cases
and
where the 4-point quadrature rule (
11), specified by
, and parameters in (
41) and (
42), is used for a general
function including polynomials. Therefore, this rule gives an approximate value of the corresponding integral.
Lemma 6. Let be arbitrary interval and is its h-uniform fuzzy partition. Let extend and as in (15) and (), respectively. For any , and its extension ,where w1, w2, w3 are in (42). Proof. On the left hand side of (
48), we have
Equation (
49) can be proved similarly. □
Theorem 2. Let be an h-uniform fuzzy partition of the interval , and n-tuple is an extended -transform of with respect to . Then for any the calculation of the component of the -transform , wherecan be performed using approximate analytical expressions for the coefficients , based on the four-point quadrature rules (11) given by , and the parameters in (41) and (42). Specifically, Remark 3. It is important to note that in (50)–(52) the parameters and , where , differ from given in (31), although they have the same designation. Proof. First of all, we note that the exact numerical estimate of the denominators in the expressions for
was proved in Theorem 1 and [
14]. Therefore, we will be focused on the calculation of
, the general expression of which is given in (
8).
We begin with the estimation of
. Using Lemma 2, Theorem 1 and Theorem 4 in [
14], we have
Therefore, for
, the denominator of
is
Obviously, the denominators of
and
also are
Applying Formulas (
48) and (
49) to calculate the numerators of the components, the theorem is proved. □
5. Theoretical Error Estimate
In parallel with the main goal of this article, aimed at reducing the complexity of calculating the components of the integral -transform for , we have contributed to numerical integration methods based on Gaussian quadratures. In this section, we give theoretical error estimates for quadrature rules defined by a new type of weight functions that generate a fuzzy partition. We also compare the approximation qualities of numerical integration methods based on already known quadrature rules and those obtained.
By [
19], the general error estimate of the
N-point Gaussian quadrature rule is as follows:
where
is an arbitrary value in
, and
is a monic orthogonal polynomial of degree
N. It is easy to see that the only last term, i.e. the value of the inner product
, is influenced by the numerical method. Therefore, below, we evaluate this term separately.
We consider the case when the weight function
is the generating function
of the fuzzy partition, as well as its translations
over the nodes
. Let
be an arbitrary real interval, and
be its
h-uniform fuzzy partition. Given (
58), we will evaluate
for
and for each interval
, where
.
Lemma 7. Let and be the orthogonal polynomials shown in (22) and (33), respectively. Then, Proof. By (
53), we immediately have
For
, we have
where
, defined in [
14], is shown explicitly in (
33), and
for all
. After the substitution, we have
Since
then
. □
We substitute the estimates obtained in Lemma 7 into (
58), and thus find the error estimates for the 3- and 4-point quadrature Gaussian rules determined by the weight functions that form the fuzzy partition.
First, consider the case where the analytic expression of the integrand of a definite integral contains a weight function. Let us denote
Lemma 8. Let the general estimate in (58) be determined by the basic function as a weight function. Then, the error estimate for the N-point Gaussian quadrature rule is as follows: - (i)
for and arbitrary ,where the roots , are given in (23); - (ii)
for and arbitrary , the 4-point Gaussian quadrature rule specified by basic function as a weight function is as follows:where the roots , are given in (41).
Proof. The proof of Lemma 8 easily follows from Lemma 7 and Equation (
58). □
Second, we estimate the definite integral taken from an arbitrary sufficiently smooth function.
Theorem 4. Let be an h-uniform fuzzy partition of . Then,
- (i)
for an arbitrary function , the following estimate holds:where the roots , , , are given in (23) and weights are in (24). - (ii)
For an arbitrary function , and an h-uniform fuzzy partition , of , the following estimate holds:where the roots , , , are given in (41), and weights are in (42).
Proof. By the assumption, functions
establish an
h-uniform fuzzy partition of
. Therefore, using Definition 1 and the Ruspini condition, we rewrite
We apply Lemma 8 to each summand and proceed as follows below.
- (i)
Let
, then,
- (ii)
Let
, then,
□
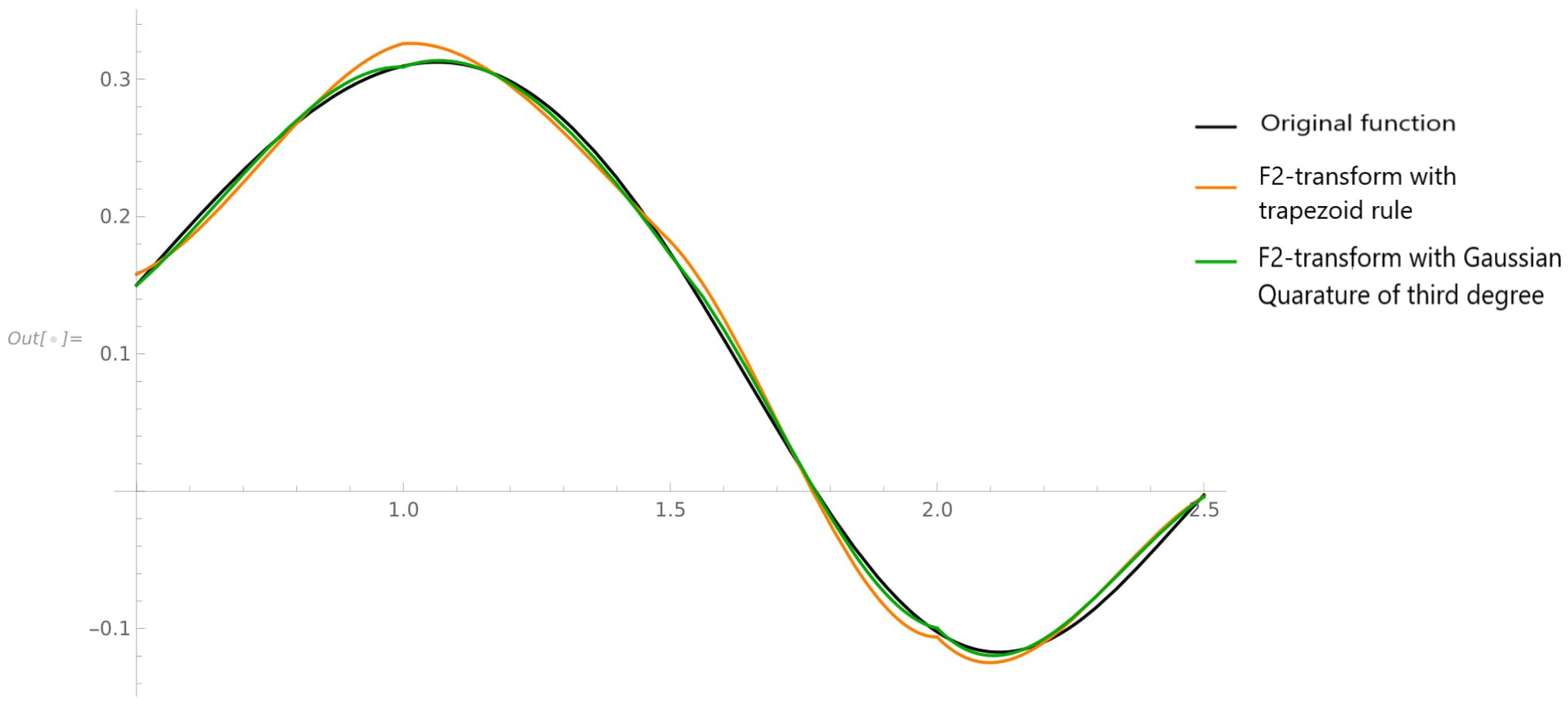
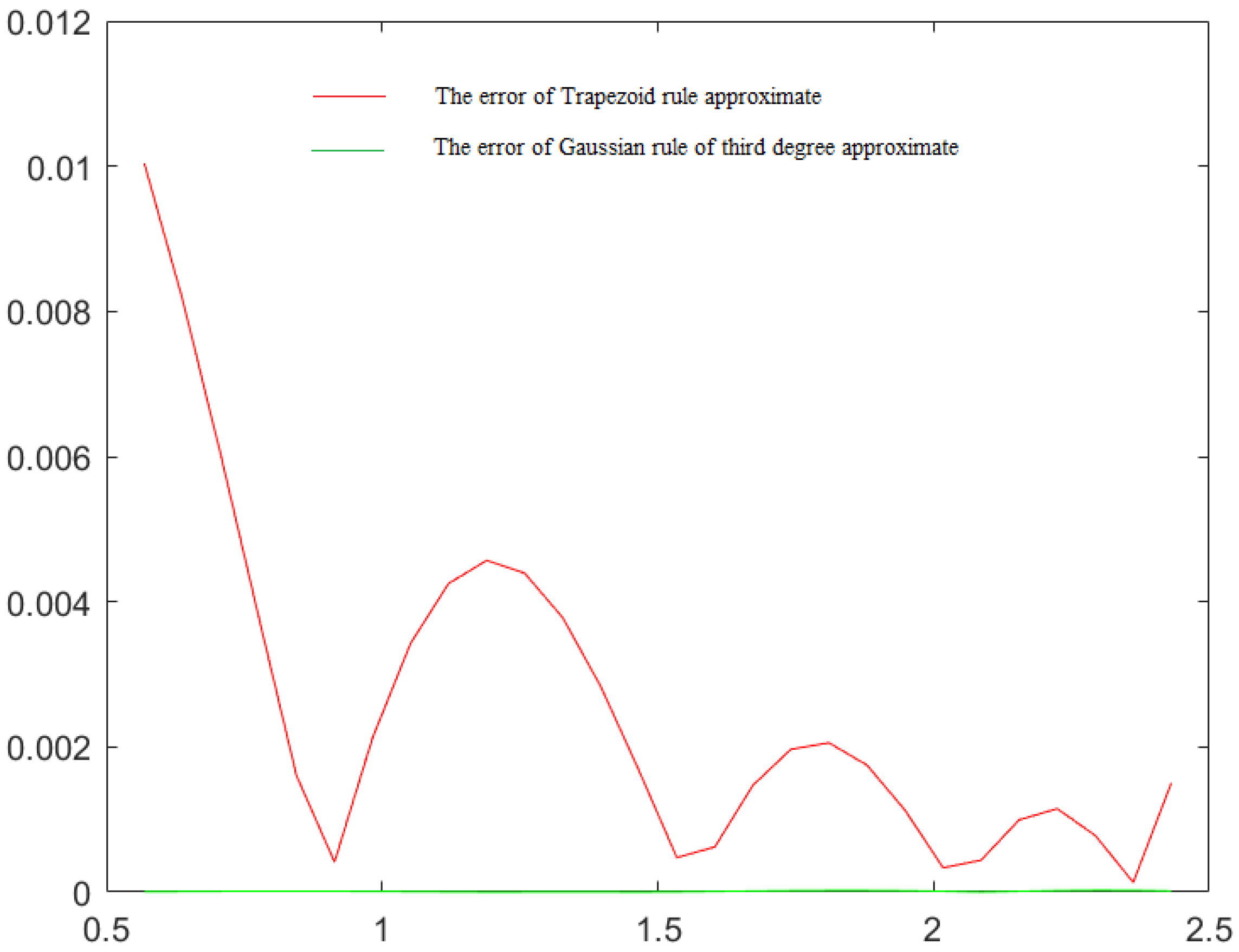
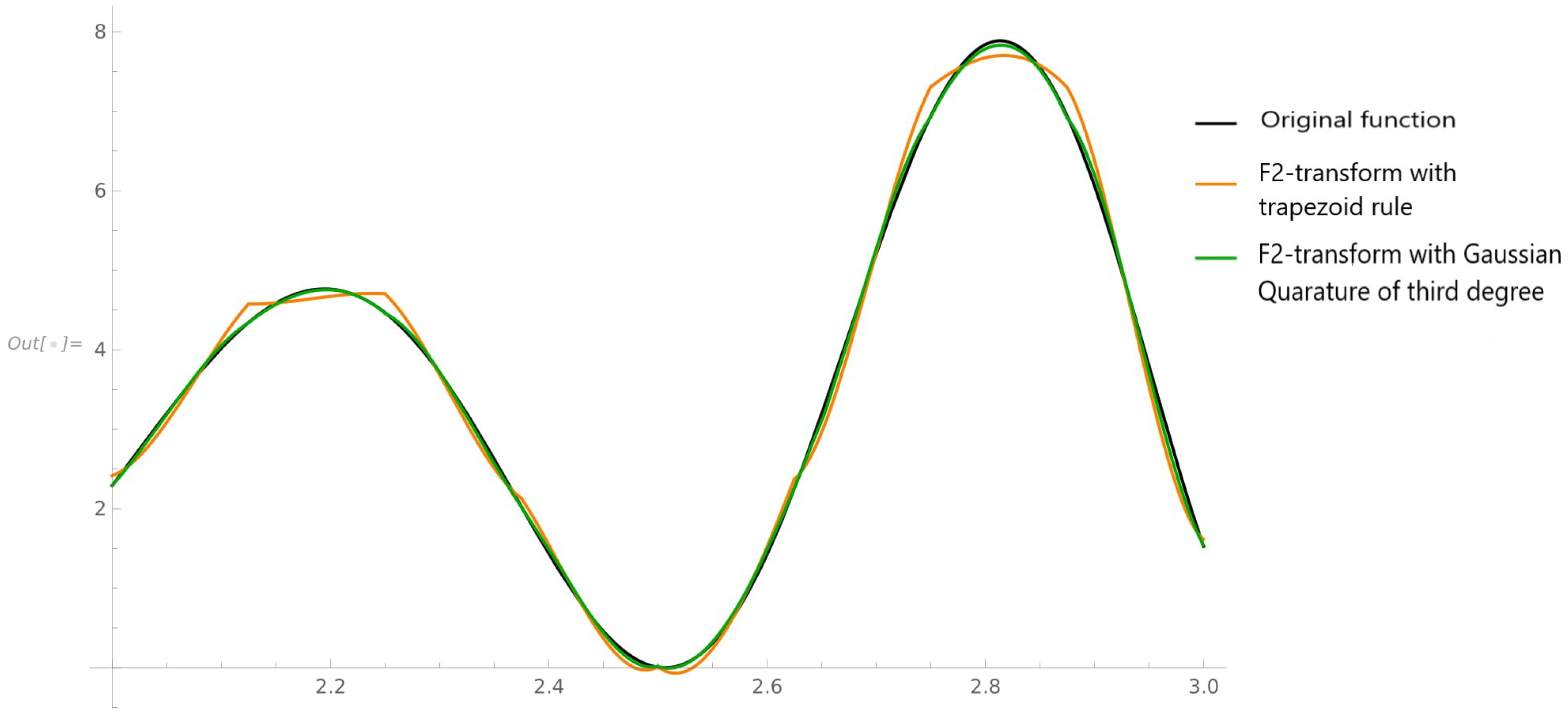
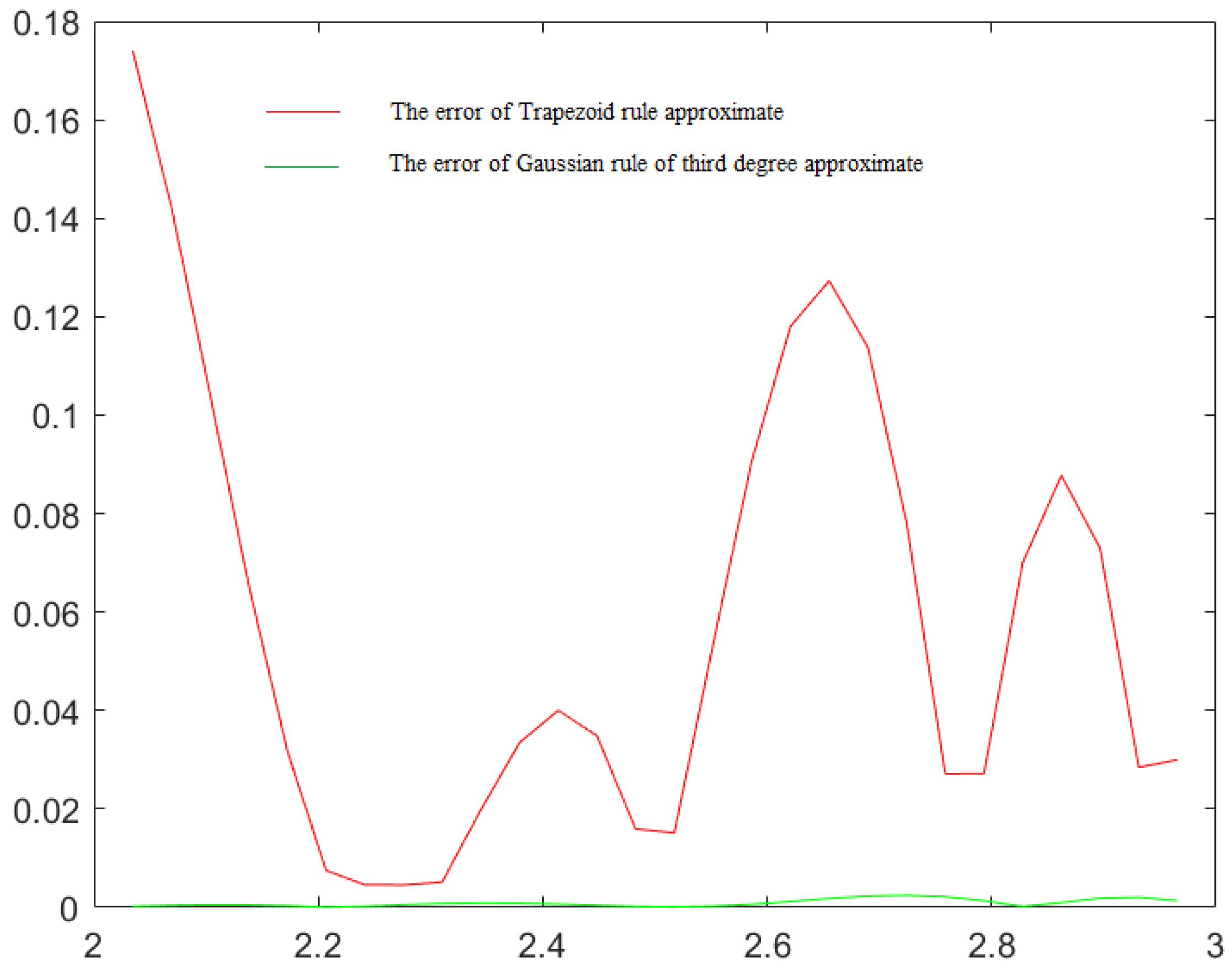
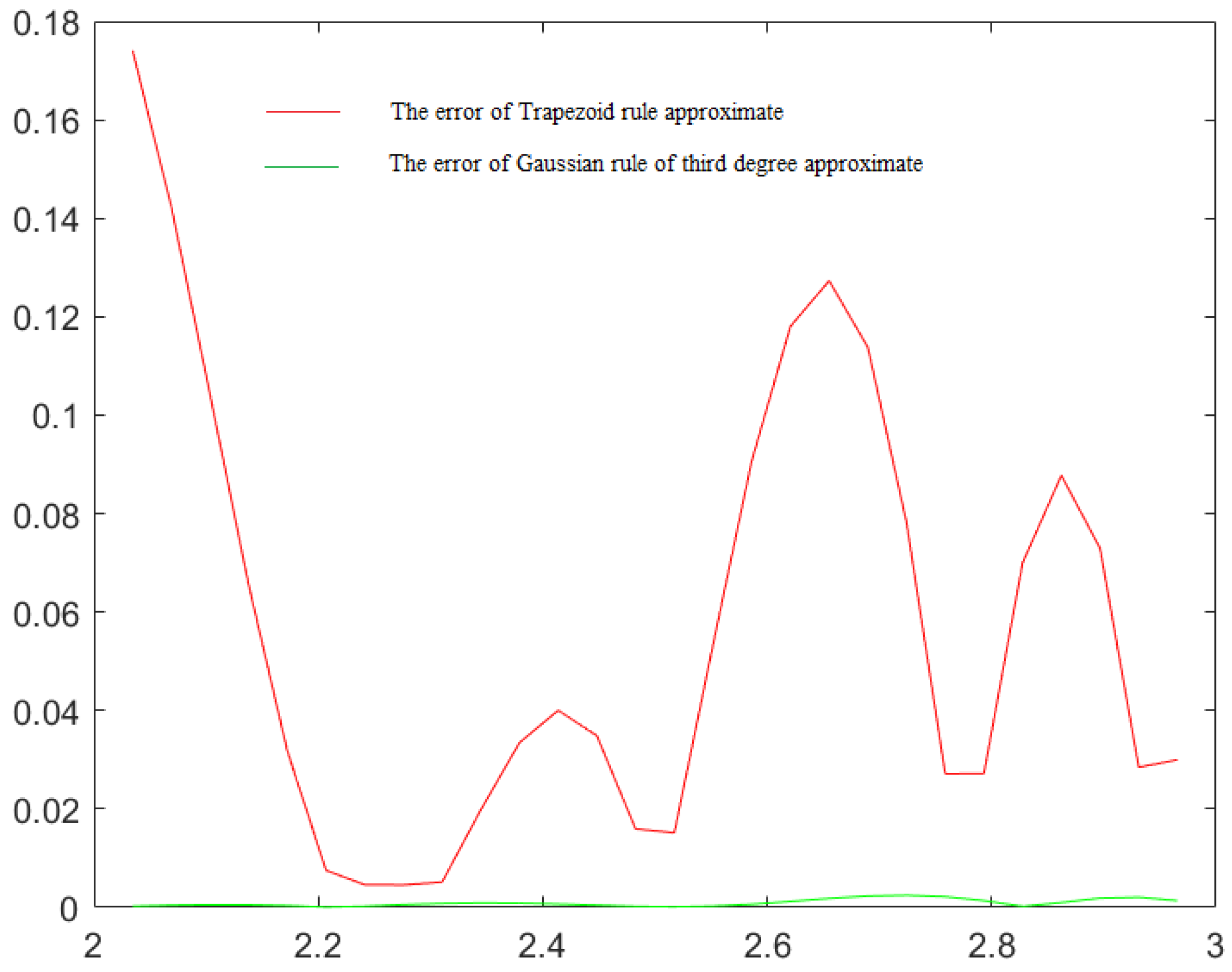
Remark 4. It is worth noting that the proposed estimate in (59) is better than if we used the composite trapezoidal rule or Simpson’s rule (by [1], the order of estimation of the error of the composite Simpson rule is 4 vs. 6 in the proposed case) under the same conditions as for the (fuzzy) partition into sub-intervals of length h. 7. Conclusions
In this study, we focused on efficient numerical methods that we could use to calculate higher degree F-transform components. The latter are expressed as weighted orthogonal polynomials with weights given by fuzzy partition elements (basic functions) and coefficients (projections onto the corresponding polynomials) expressed using certain integrals. Therefore, in search of effective methods of numerical integration, we came to Gaussian quadrature rules, the accuracy of which depends on the number of integration points.
In this manuscript, we analyzed the 3- and 4-point Gaussian quadrature rules and found all their parameters, which allowed us to obtain exact analytical expressions for the values of certain integrals, in which the integrands are polynomials up to (inclusive) 7th degree. With their help, we have obtained good approximate estimates of the components of the -transform for , expressed without the use of definite integrals.
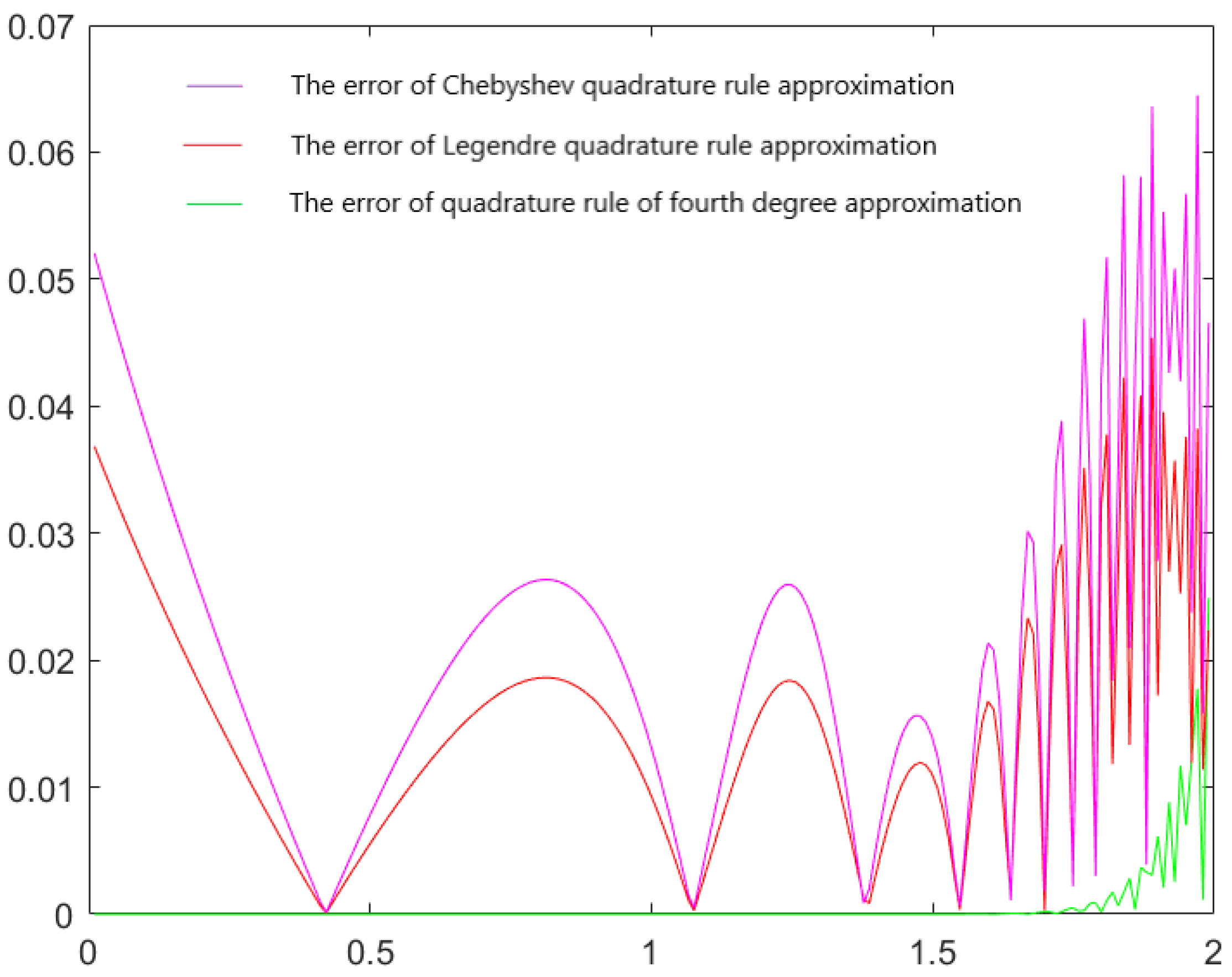
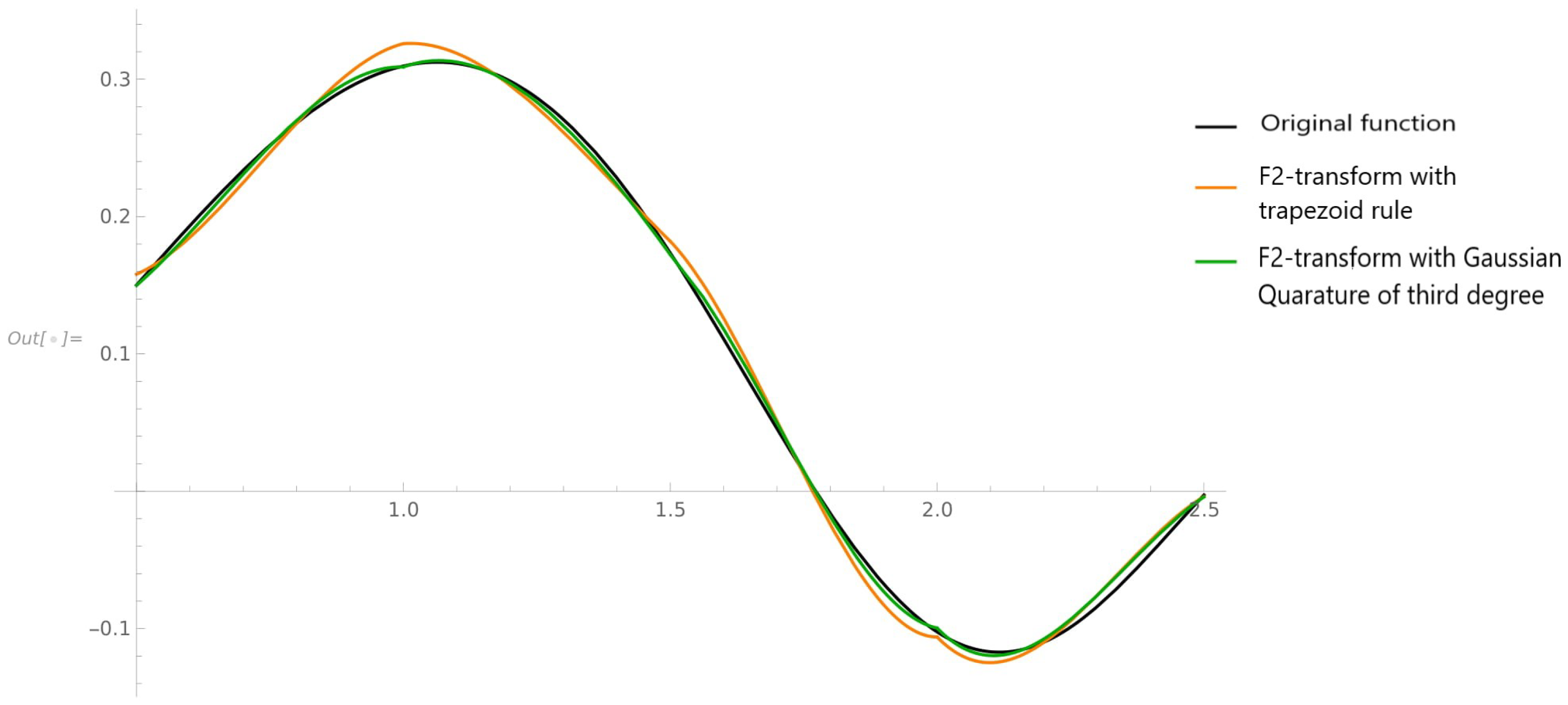
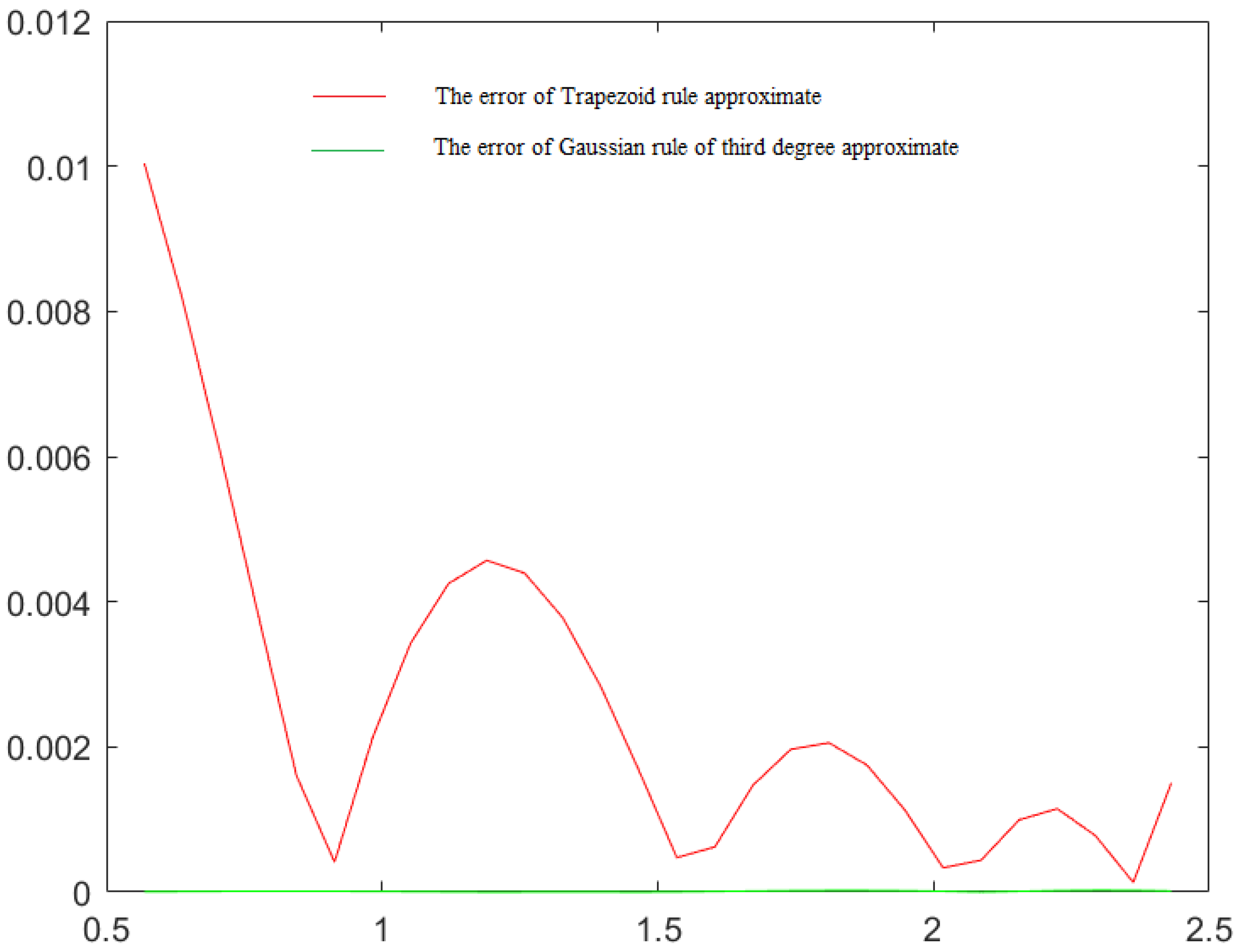
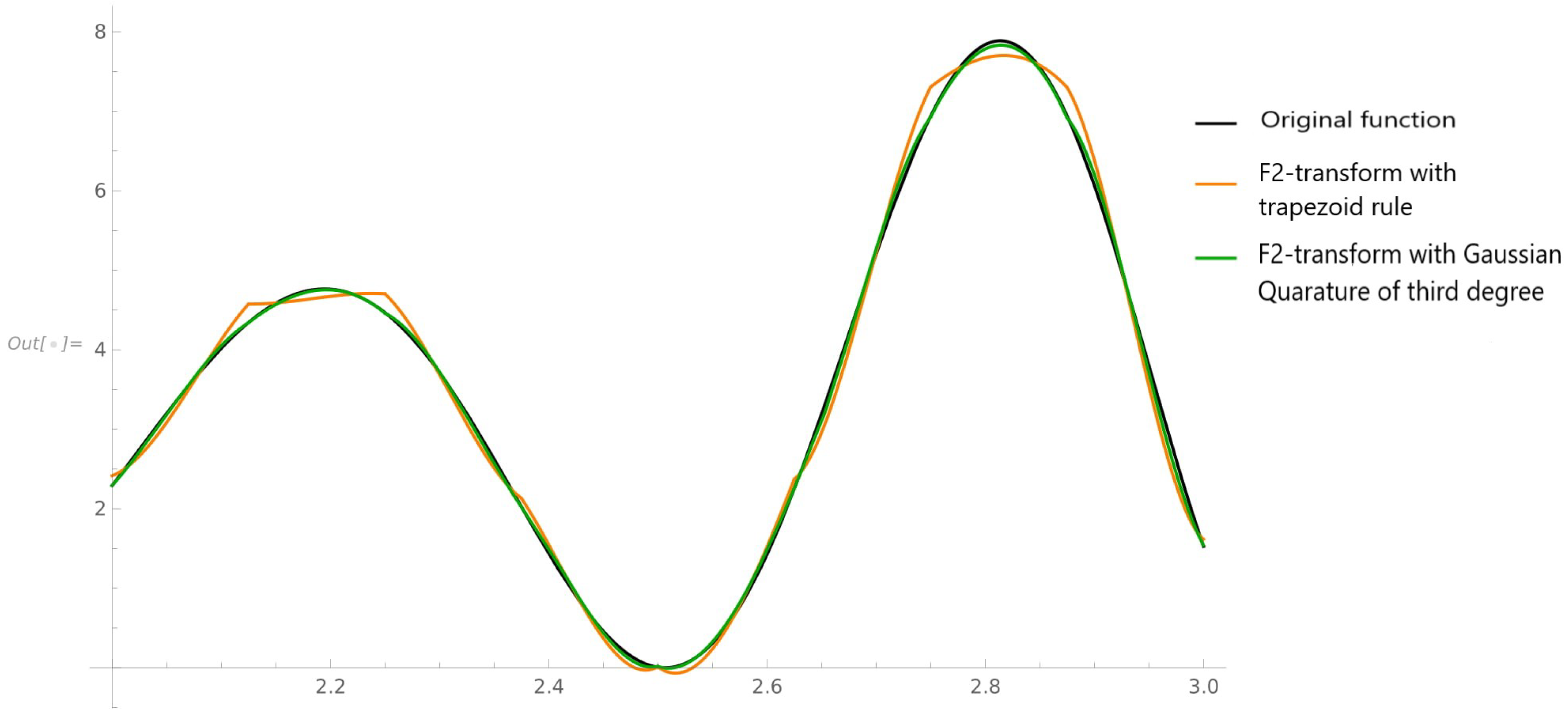
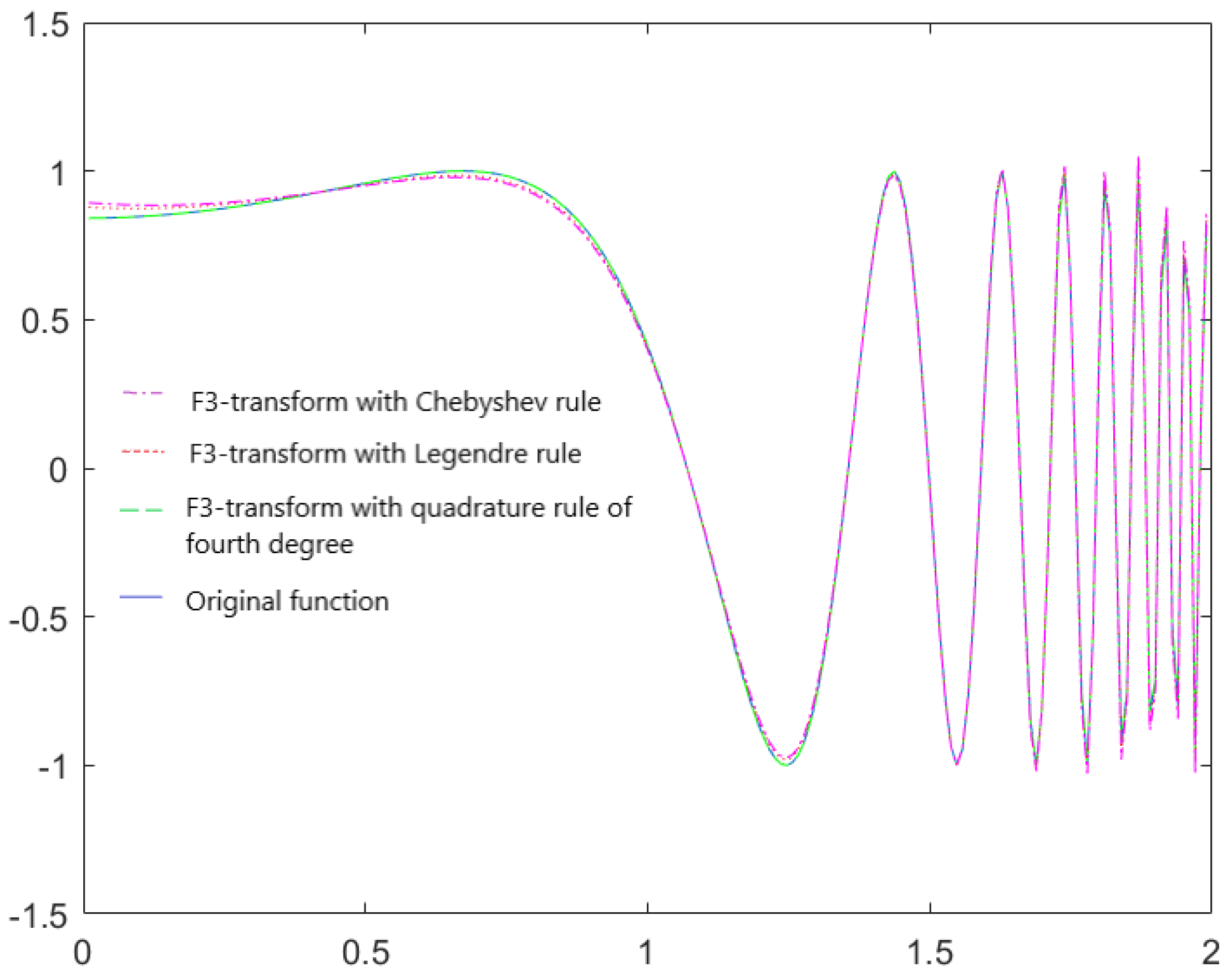
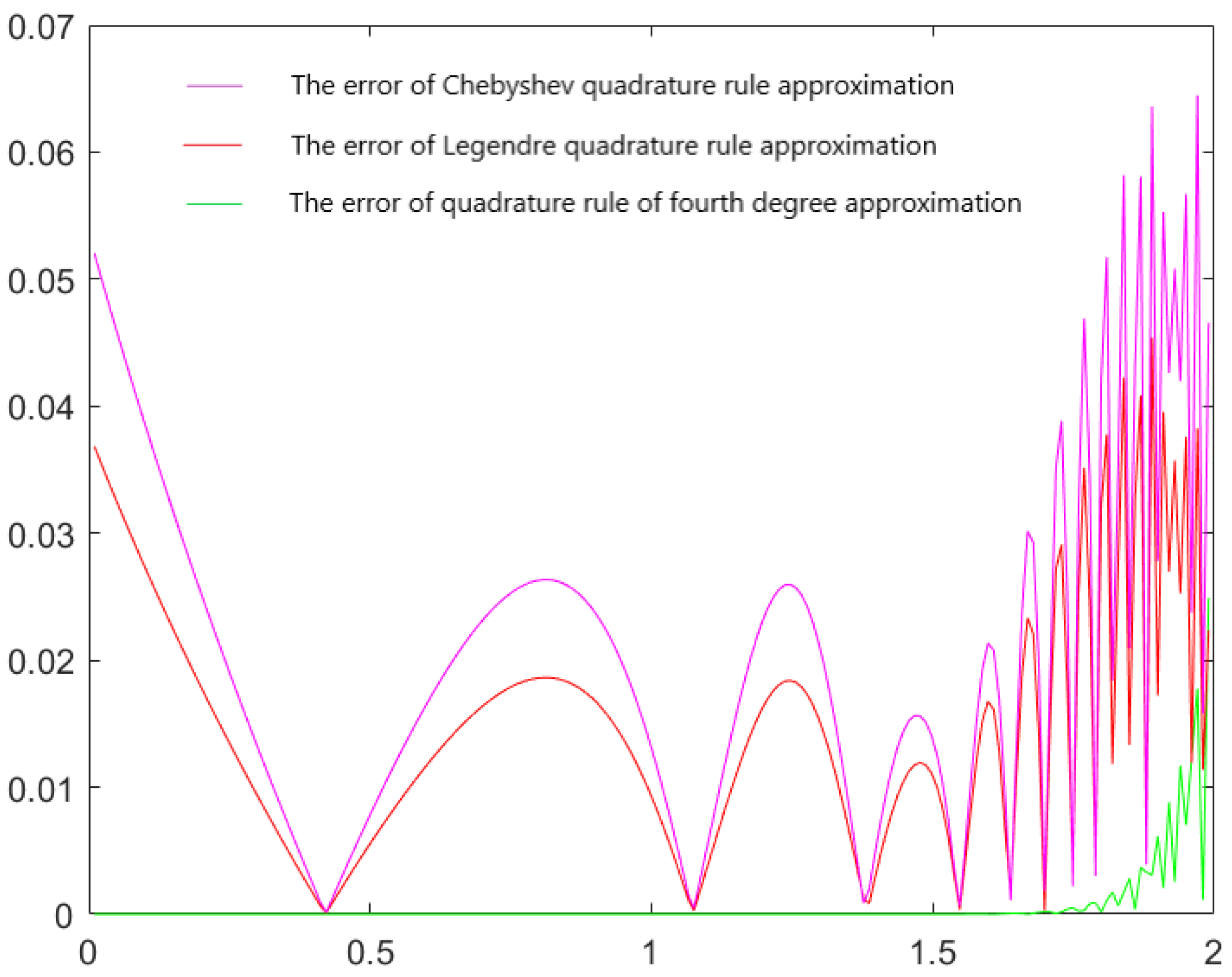
In addition, we have shown that our results can be useful for the numerical integration of arbitrary (integrable) functions. In this case, we gave an estimate of the error and compared it with the estimates of similar methods. We have shown that the approximation quality of the proposed method is at least two order better in comparison with the trapezoid and Simpson rules. We have compared our approach with other Gaussian quadrature rules, based on Legendre or Chebyshev polynomials. Finally, we performed numerical tests and confirmed all theoretical results.
In the future, we plan to use the received approximate estimates of the components of the -transform for , in all applications of F-transform methodology, where the main factors are accuracy and computational complexity. This includes numerical solutions of various differential and integral equations, processing images and time series.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}