
Numerical Simulation of Slope Stability during Underground Excavation Using the Lagrange Element Strength Reduction Method

Abstract
:Highlights
- The entire disturbing slope is divided into four regions.
- The critical sliding surface shows an L-shaped or a W (double L)-shaped broken line.
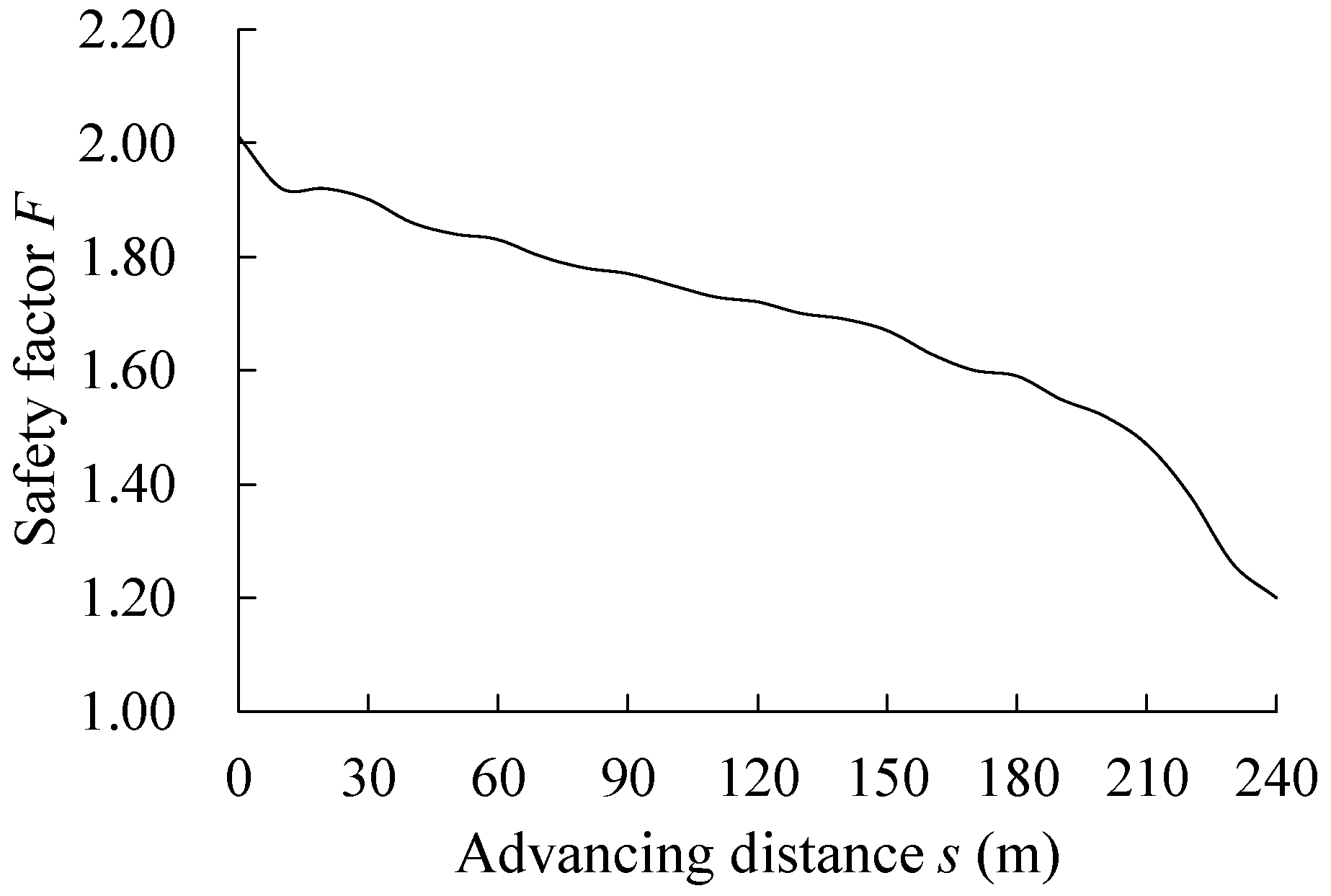
- When the advancement exceeds a certain value, the safety factor suddenly drops.
- This study offers a basis for selecting an appropriate working face stop line.
Abstract
1. Introduction
2. Stability and Evaluation Method of the Slope during Underground Mining in the End Slope
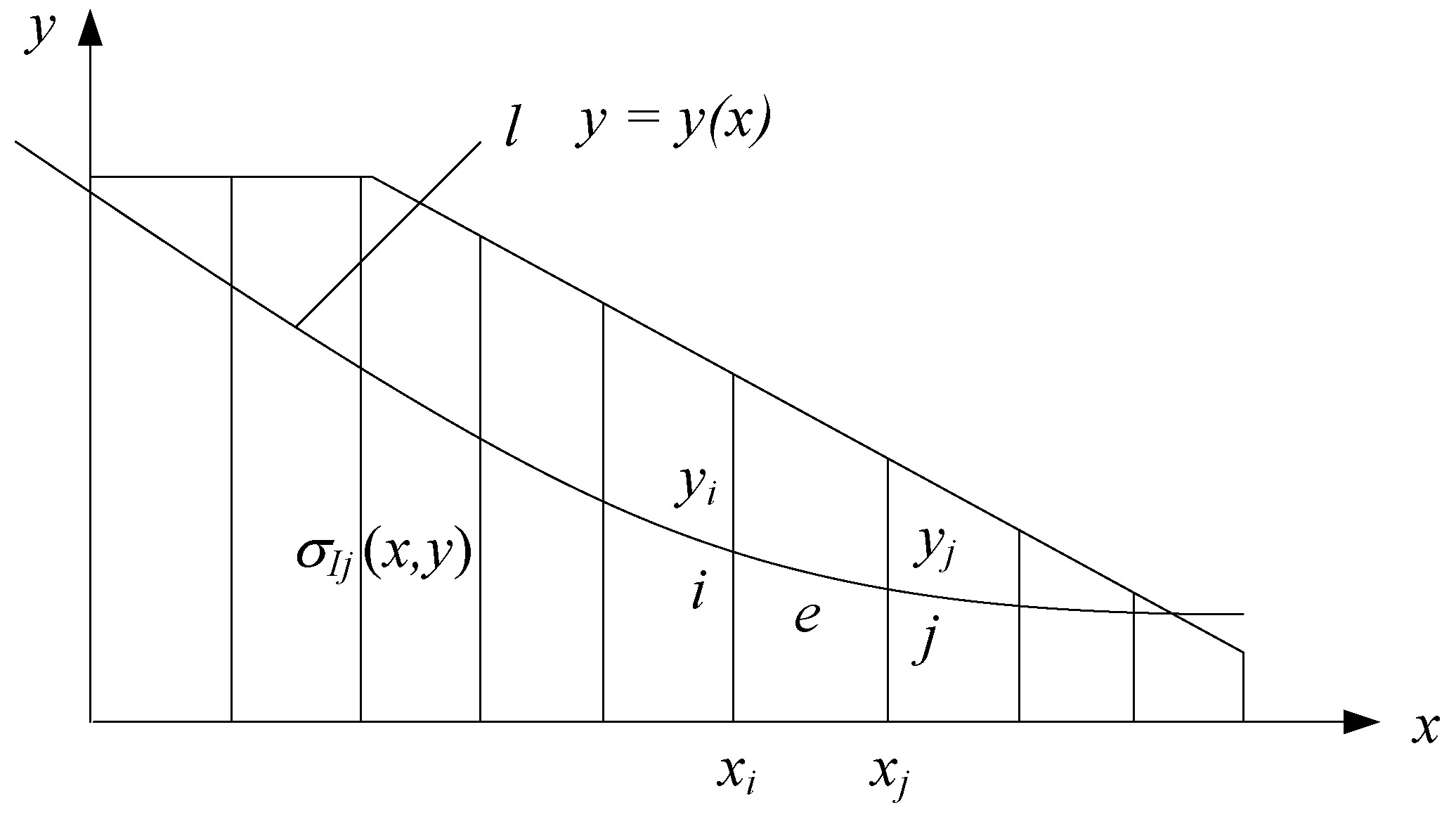
2.1. Lagrange Element Limit Analysis Principle in Soil and Rock Slopes
2.1.1. Definition of Safety Factors for Strength Reduction Methods
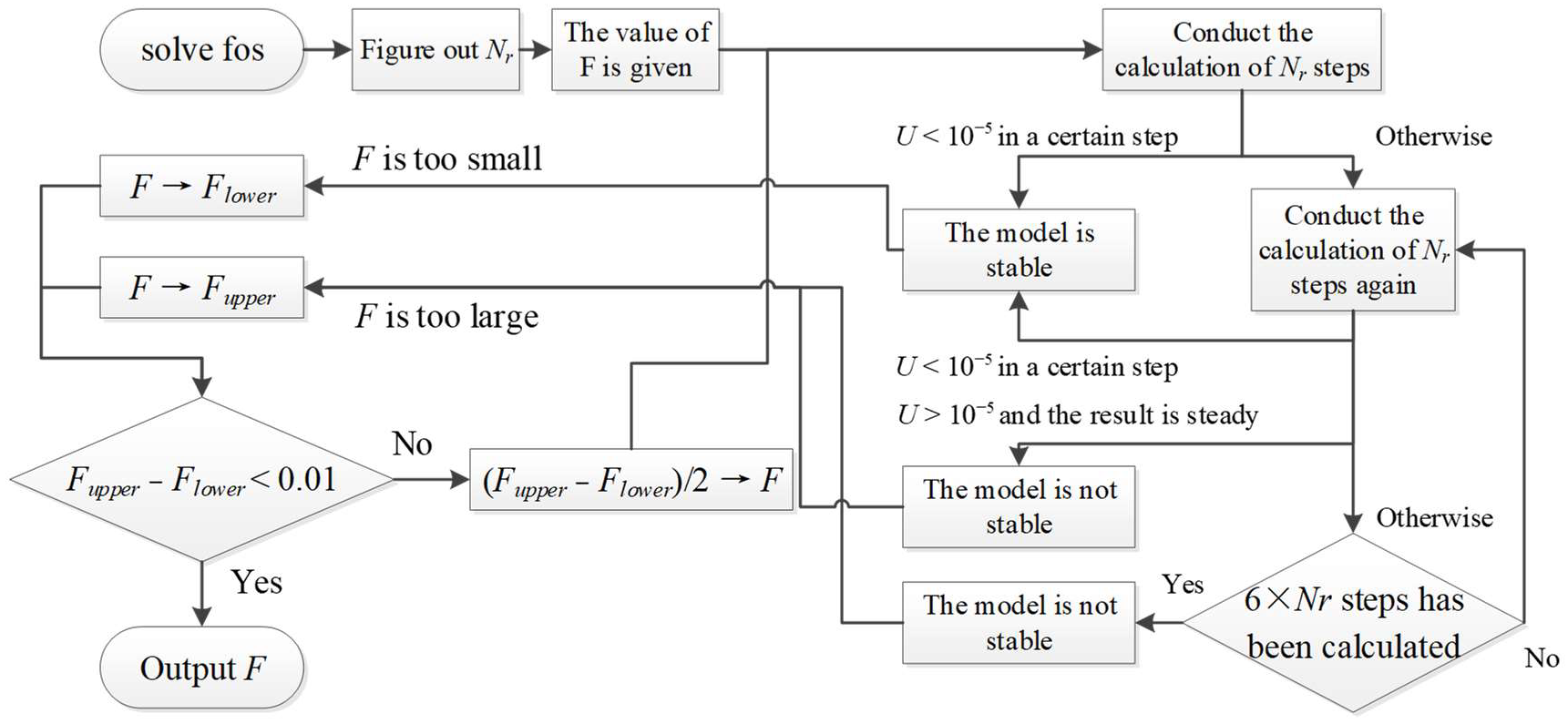
2.1.2. Basic Algorithm for Strength Reduction in the Lagrange Element
2.2. Strength Reduction Numerical Model for Stability Analysis of Disturbed Slope
2.3. Slope Deformation and Critical Slip Surface Evolution Law during Underground Mining in the End Slope
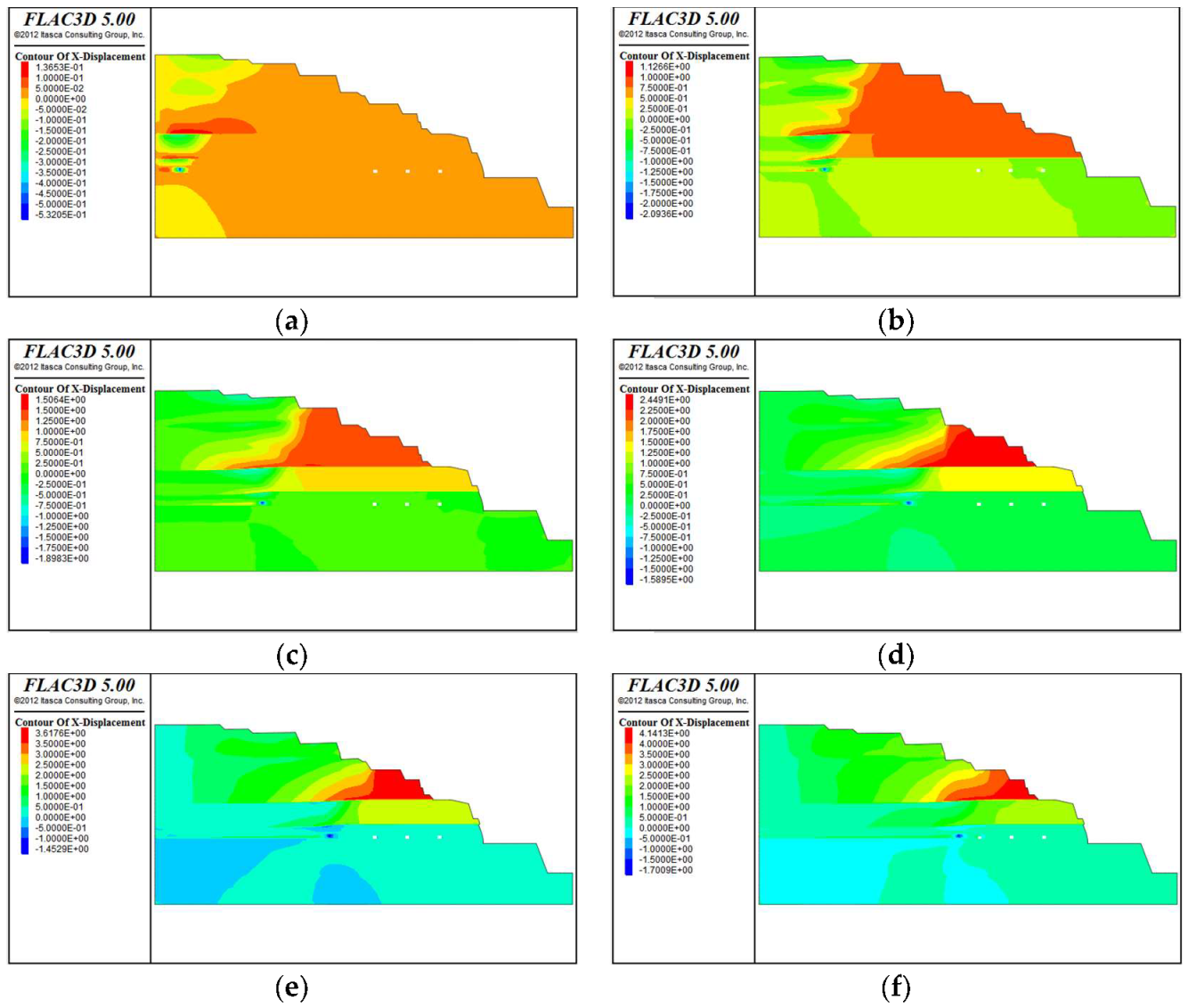
2.3.1. Characteristics of the Displacement of the Disturbed Slope
- (1)
- Horizontal displacement of steps
- i.
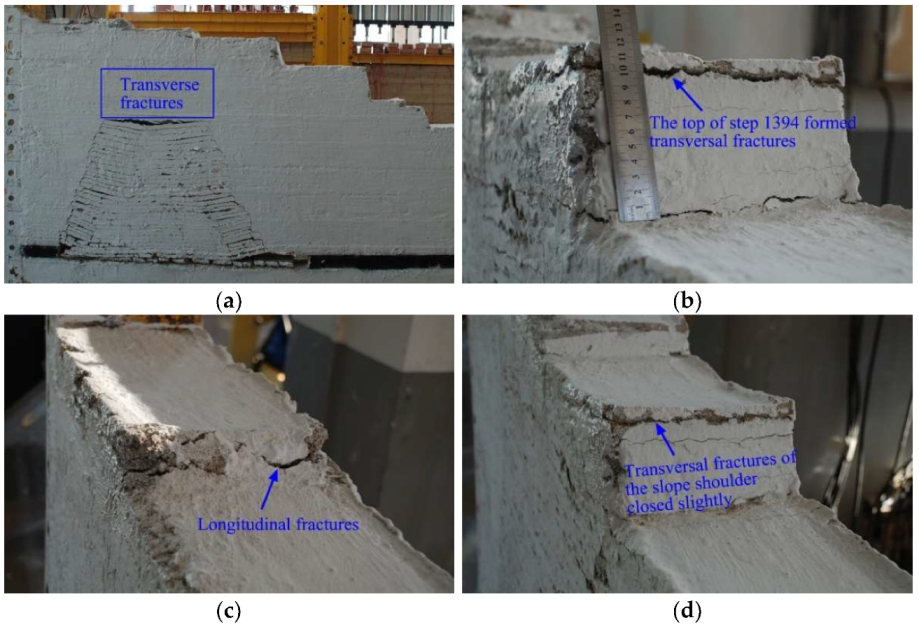
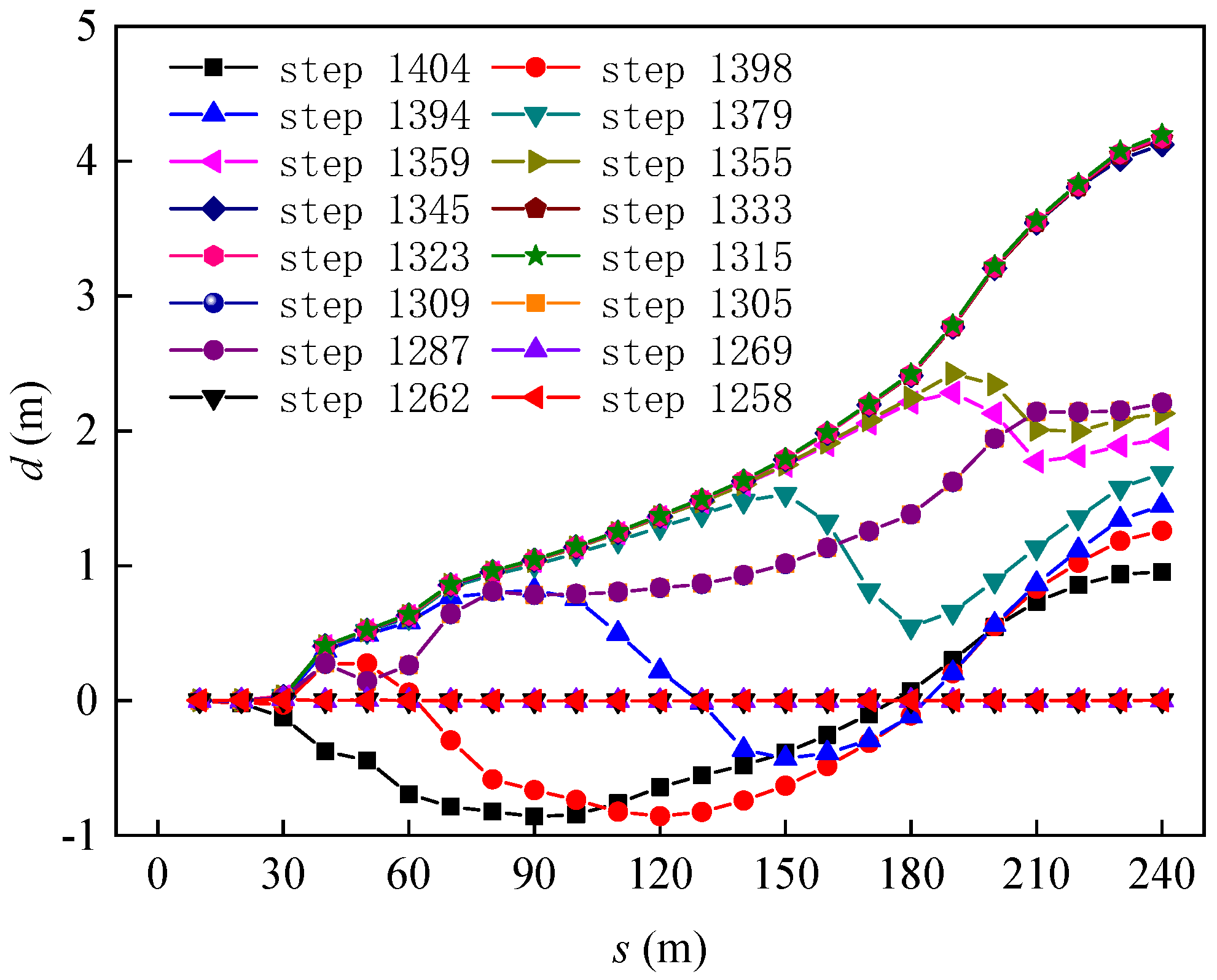
- The step on the upper slope is affected by mining subsidence and slope deformation. Its d–s curve generally presents an upward–downward–upward pattern, and the decline range is obvious. Slope deformation mainly affects the horizontal displacement of the step during the ascending stage of the curve. However, in the descending stage of the curve, mining subsidence primarily affects the horizontal displacement of the step. The value of s corresponding to the inflection point of the curve from rising to falling is the corresponding advancing distance of the working face when the influence of mining subsidence on the horizontal displacement of the step is enhanced. Taking Step 1398 as an example, in the process of advancing the working face from 0 to 50 m, the top of the slope is located outside the goaf boundary (on the right side of the boundary) and mining subsidence insignificantly affects its movement. However, due to the mining disturbance, the slope body deforms and drives the step toward the mined-out area (move toward the right), which is shown by the increase in its horizontal displacement and the rise in the d–s curve. The step is located within the boundary when the working face advances from 50 to 120 m. Affected by the collapse of the overlying strata of the goaf, the step moves away from the free face, showing that its horizontal displacement decreases and the d–s curve decreases. When the working face continues to advance beyond 120 m, as the step is located directly above the goaf, the mining subsidence mainly causes the step to move downward. Slope deformation again becomes the main factor inducing the horizontal movement of the step. The step moves toward the goaf again, and the d–s curve rises.
- ii.
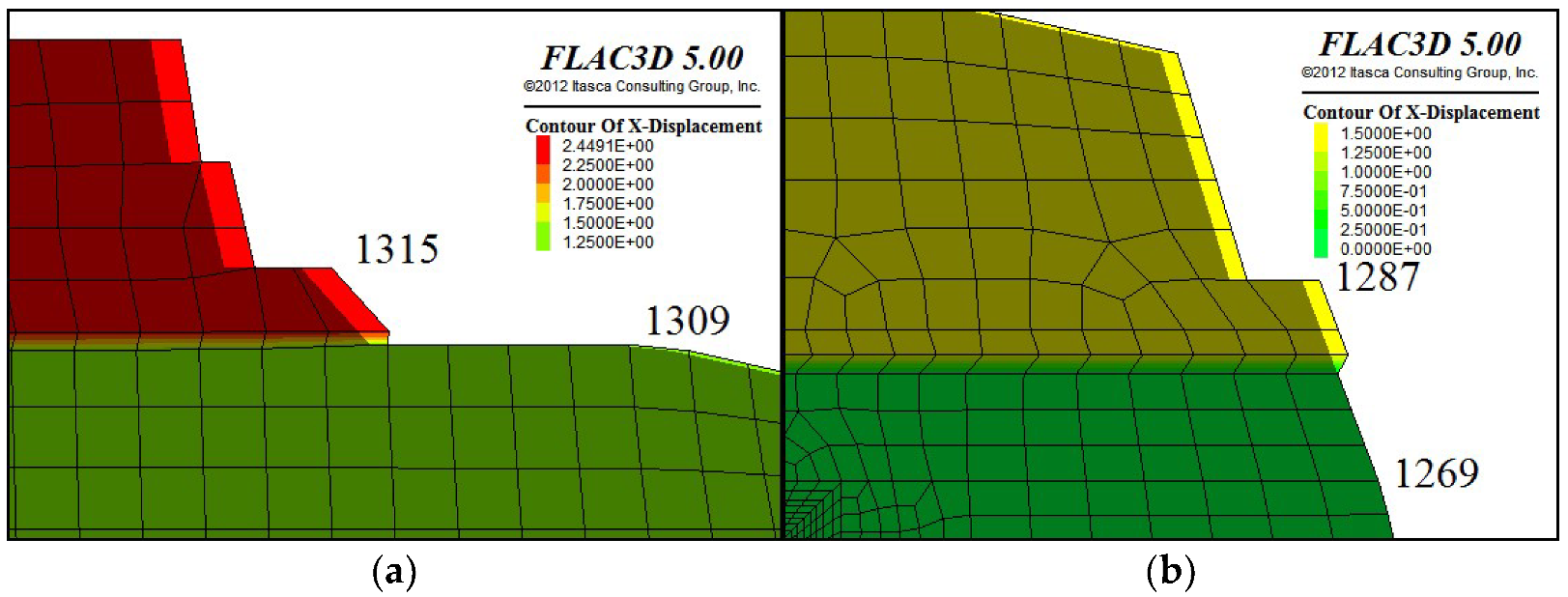
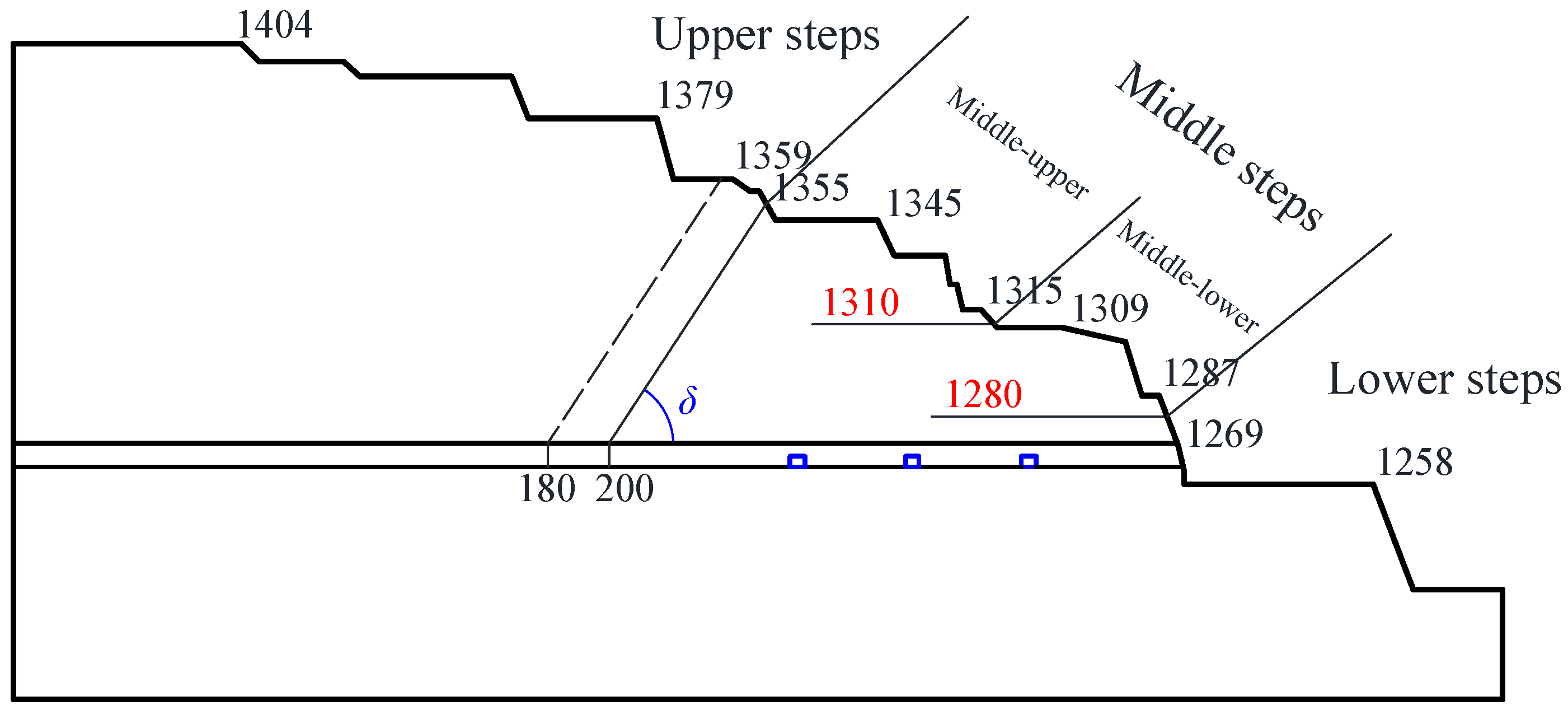
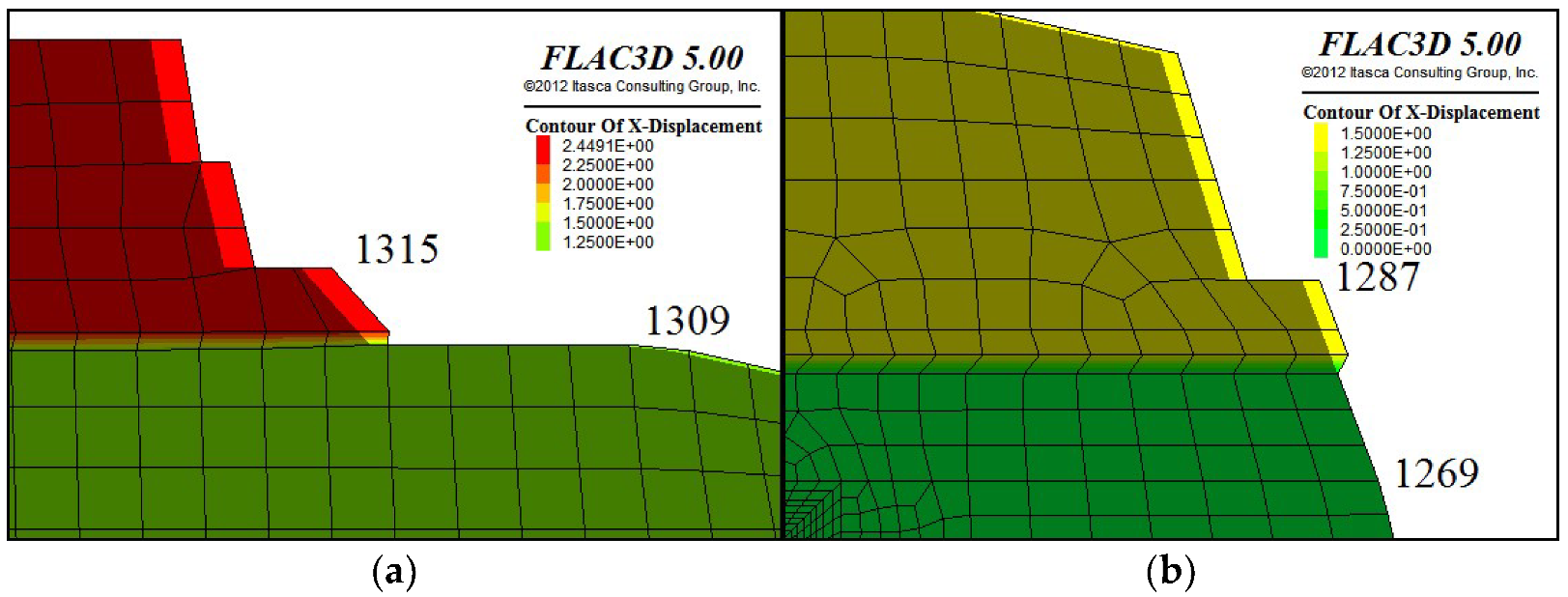
- The step in the middle of the slope is always outside the boundary line when the working face advances to the stop mining line. The influence of slope deformation on the horizontal movement of the step exceeds that of mining subsidence, and the d–s curve generally presents a rising trend with no obvious decline interval. These steps can be divided into two parts via the 1310 weak plane. The steps above the 1310 weak plane are affected simultaneously by the slip of the two weak planes and their horizontal displacements are large. Steps from 1309 to 1287 are located between two weak planes; therefore, they are only affected by the slip of weak plane 1280, and the horizontal displacement is small.
- iii.
- The mining subsidence and slope deformation slightly affect the steps below the 1280 weak plane. The d–s curve is almost a horizontal line; hence, the horizontal displacement value is 0 m.
- (2)
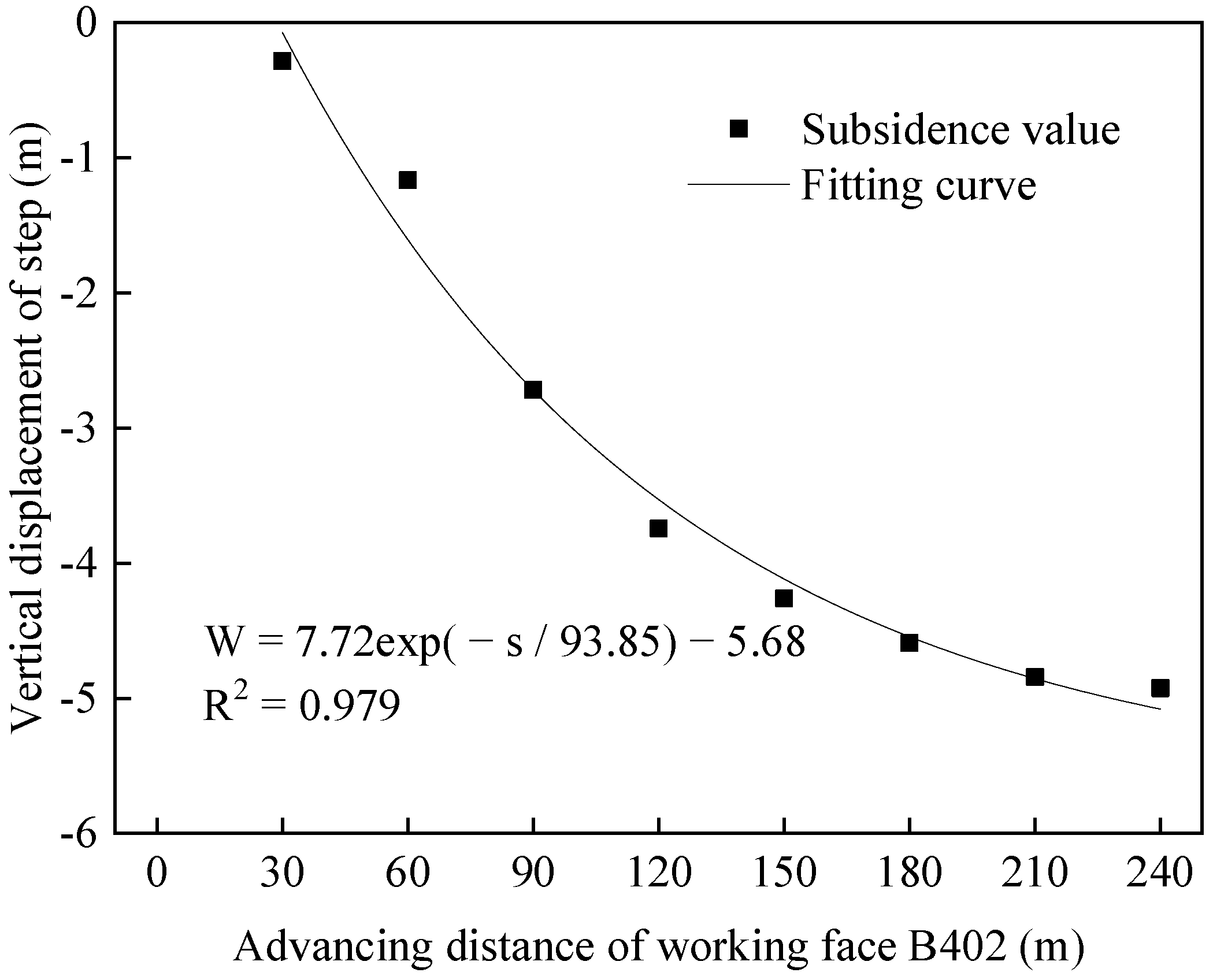
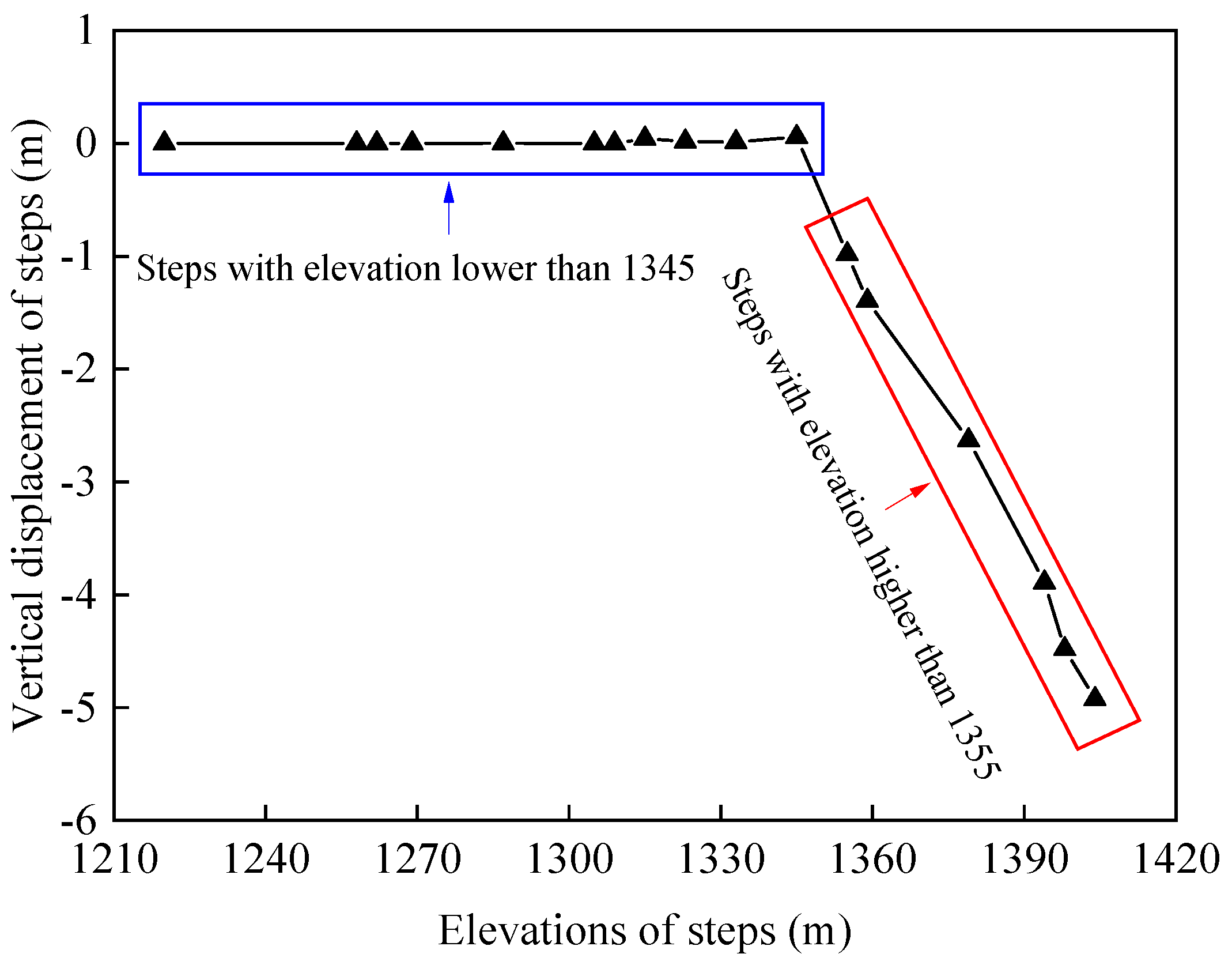
- Vertical displacement of steps
- (3)
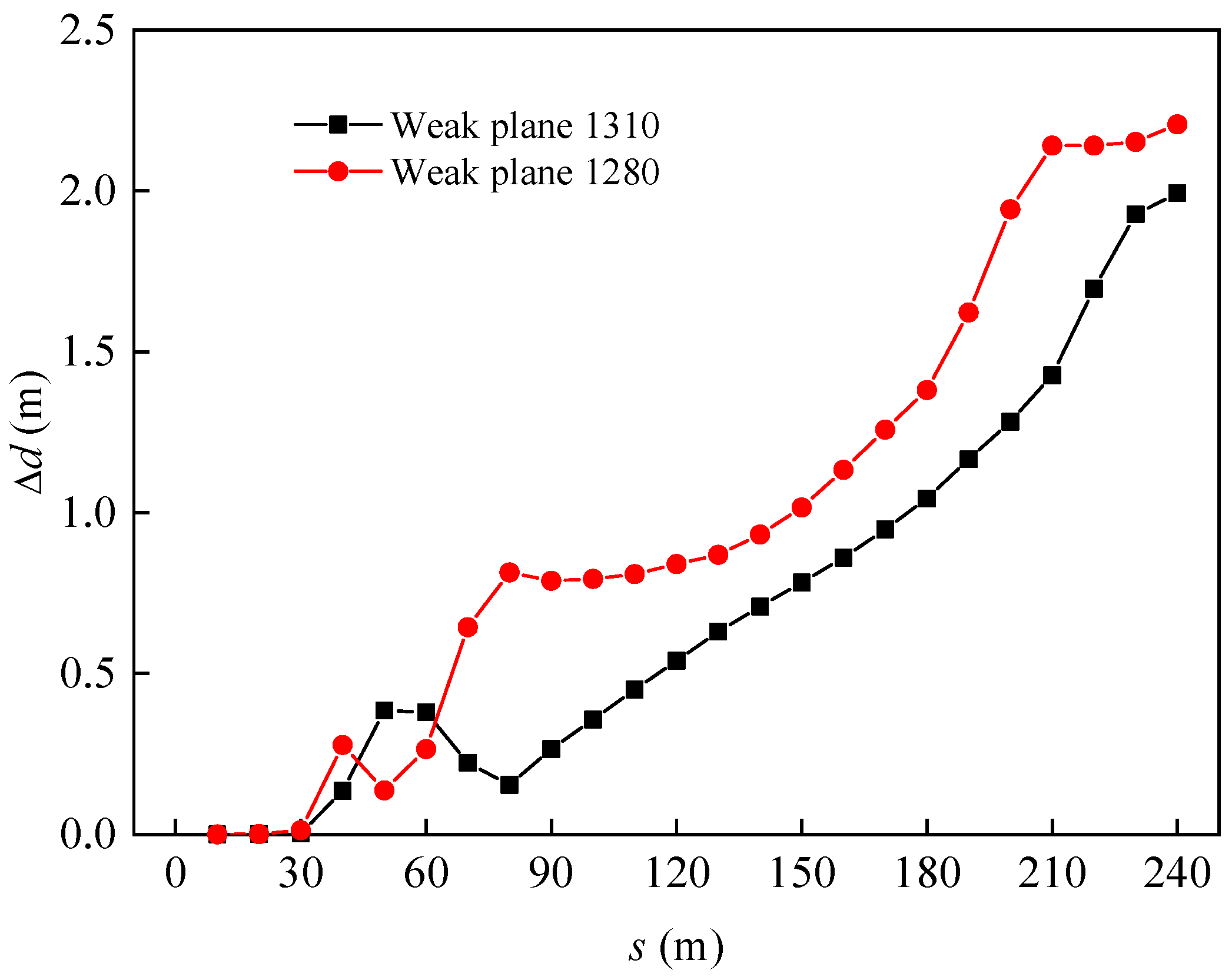
- Slipping of weak interlayer
2.3.2. Position and Shape Evolution of the Critical Slip Surface
- (1)
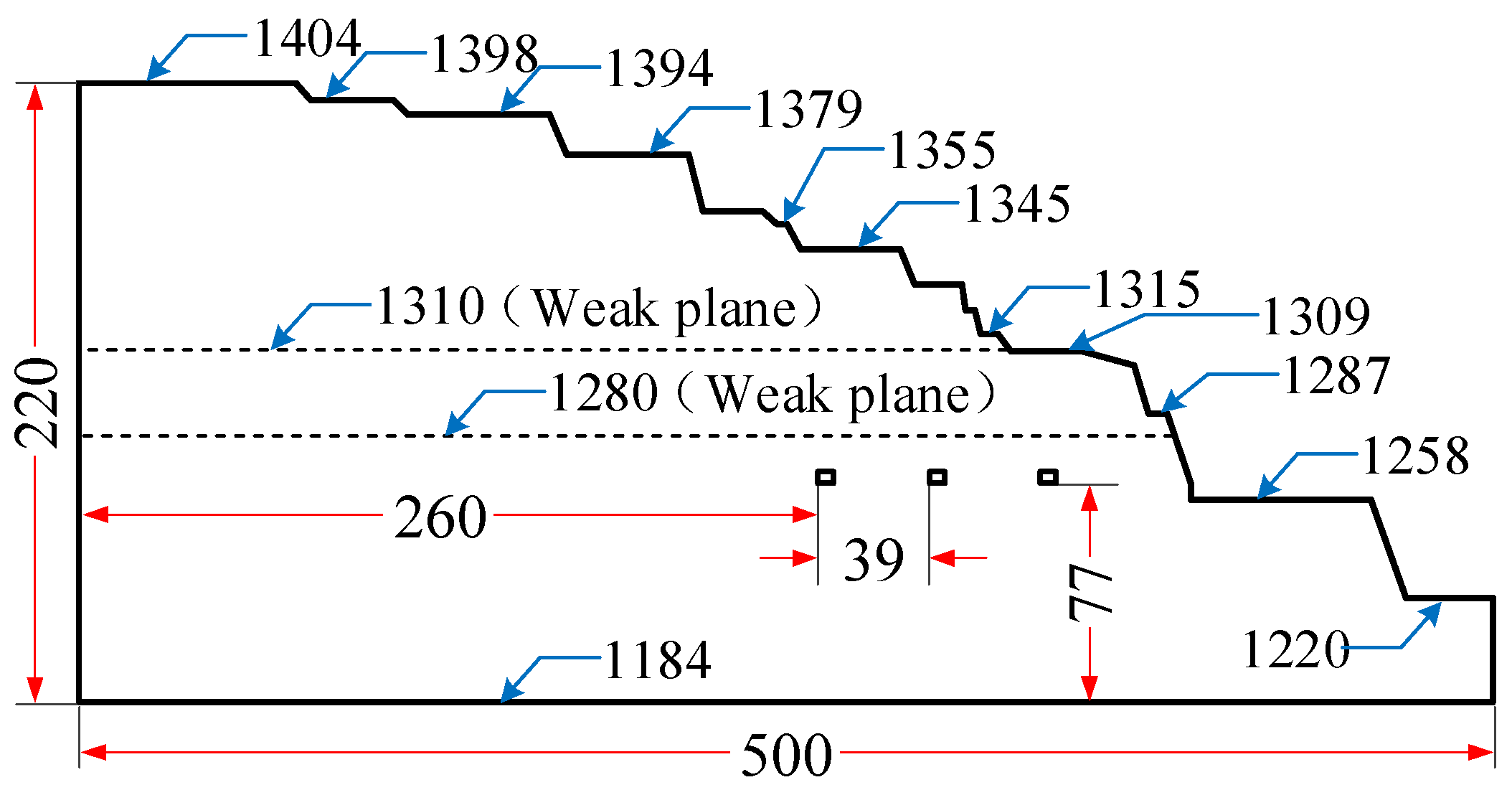
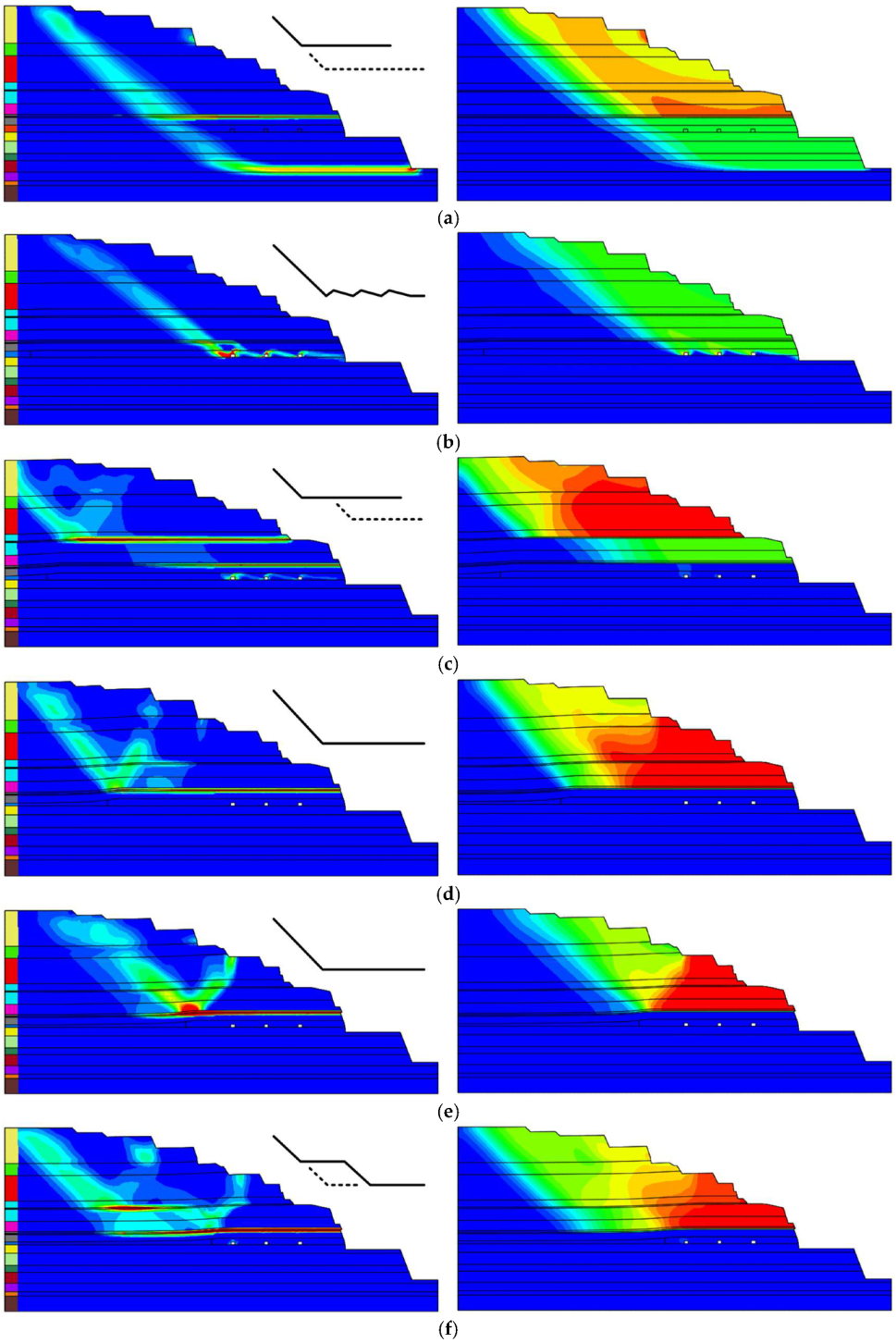
- The initial slope mainly contains three critical sliding surfaces. The main sliding surface is from Step 1404 to the weak surface 1280, and the main slip mass cuts along the weak surface 1280 and the slope surface of Step 1287. The secondary sliding surface is from the flat plate 1404 to the 9# coal seam, and the secondary slip mass cuts along the 9# coal seam at the slope foot of Step 1258. A local critical sliding surface is observed in Step 1379, which mostly comprises loess with low strength, is the step with the steepest slope in the loess soil layer, and has the tendency to landslide.
- (2)
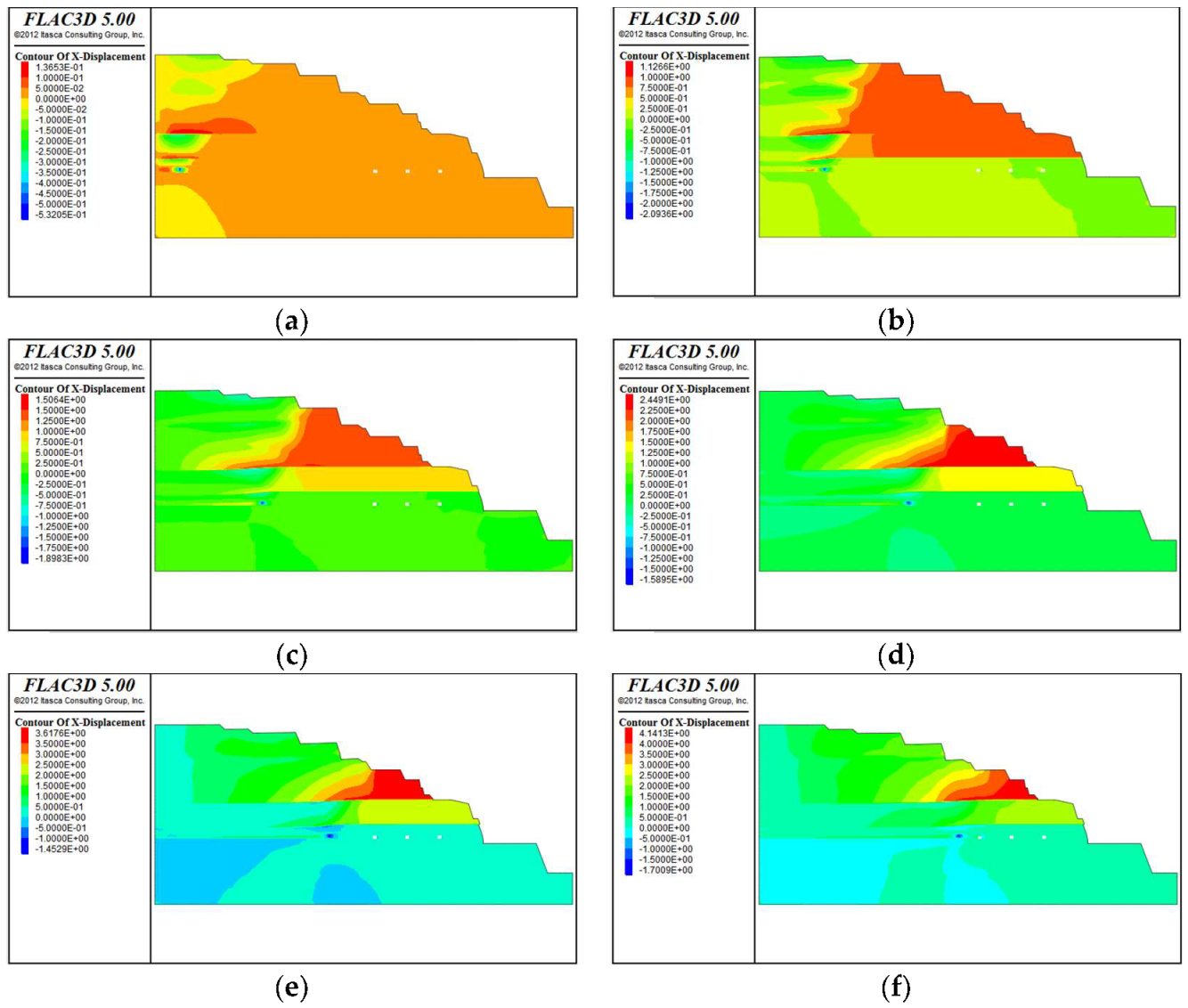
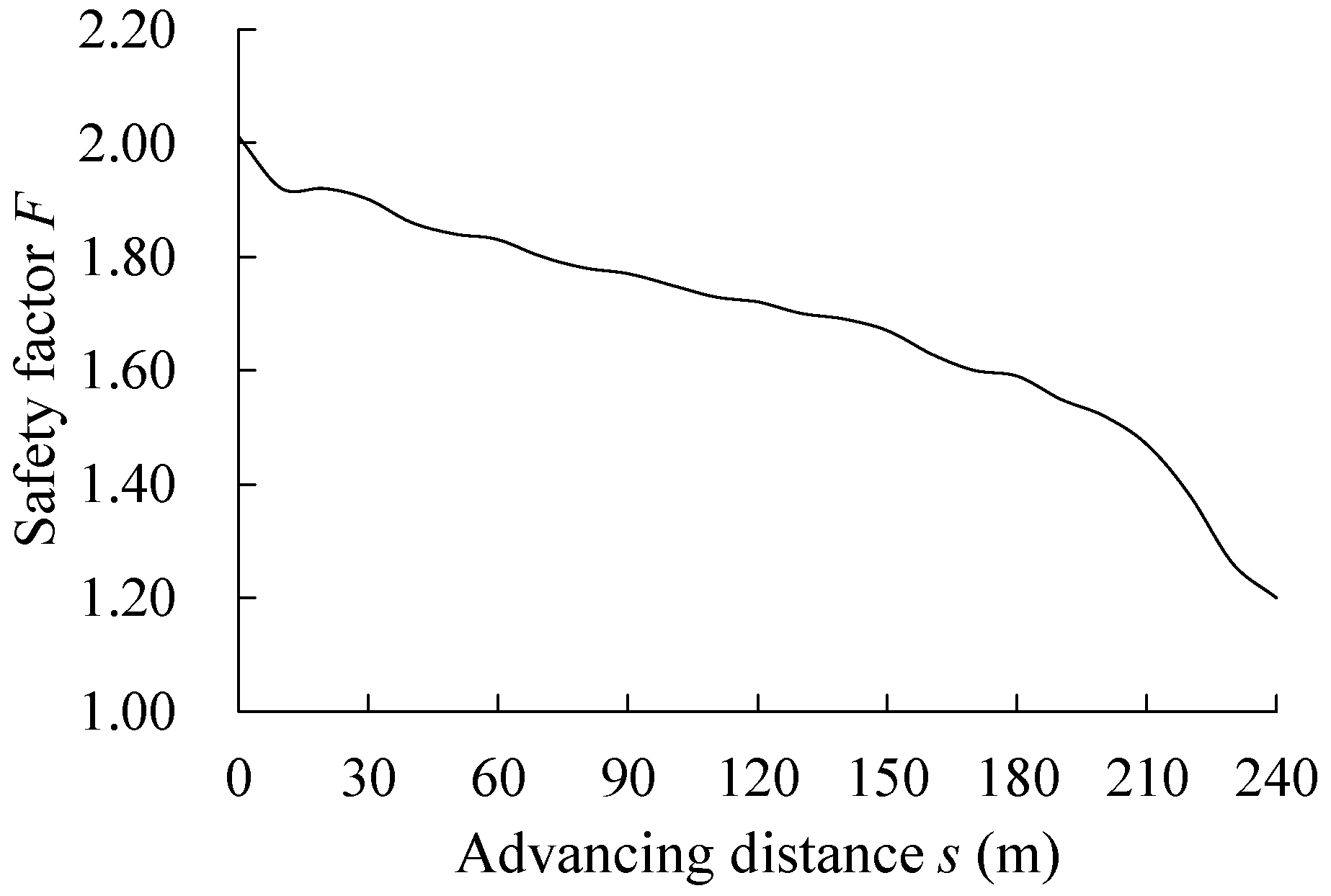
- After roadway excavation, when the advancing distance of the working face is between 0 and 30 m, the position and form of the critical sliding surface remain unchanged (Figure 14b). The critical sliding surface extends from Step 1404 to the left side of the auxiliary roadway of the 4# coal seam. The three roadways are taken as the base point and extend in a zigzag shape to the slope foot of Step 1262. The slip mass cuts from the slope foot of Step 1262. In this interval, the safety factor does not change and the mining disturbance slightly influences slope stability.
- (3)
- When the advancing distance of the working face is between 40 and 50 m, the position and shape of the critical sliding surface remain unchanged (Figure 14c). The main sliding surface extends from Step 1404 to the weak plane 1310, and the main sliding body is cut out along the weak plane 1310 at the slope foot of Step 1315. The secondary sliding surface extends from the weak plane 1310 to the weak plane 1280, and the secondary slip mass cuts along the weak plane 1280 and the slope surface of Step 1287. The nephogram of the plastic shear strain rate shows that the roadway of the 4# coal seam is also seriously sheared, but the shearing surface does not develop upward or form a sliding plane. In this interval, the safety factor clearly decreases.
- (4)
- When the advancing distance of the working face is between 60 and 210 m, the form of the critical sliding surface is unchanged and the position moves toward the free face with the advancing of the working face (Figure 14d,e). The critical sliding surface extends from Step 1404 or slope foot to the weak plane 1280, and the sliding body cuts from Step 1287 along the weak plane 1280. During this interval, the safety factor continues to decrease.
- (5)
- When the advancing distance of the working face is between 220 and 240 m, the position and form of the critical sliding surface remain unchanged (Figure 14f). The main sliding surface extends from Step 1404 to the weak plane 1310. After developing along the weak plane 1310 for a certain distance, it continues to extend downward to the weak plane 1280 in the form of a W (double L)-shaped broken line. The main slip mass cuts along the weak plane 1280 and the slope surface of Step 1287. The secondary sliding surface extends from the weak plane 1310 to weak plane 1280 and intersects with the main sliding surface. In this interval, the factor of safety decreases rapidly. Zhu, et al. [37] adopted a numerical simulation to optimize the boundary parameters and concluded that when the horizontal distance between the open-off cut and the slope was increased by 20 m, the overall stability of the slope would be significantly improved.
- (6)
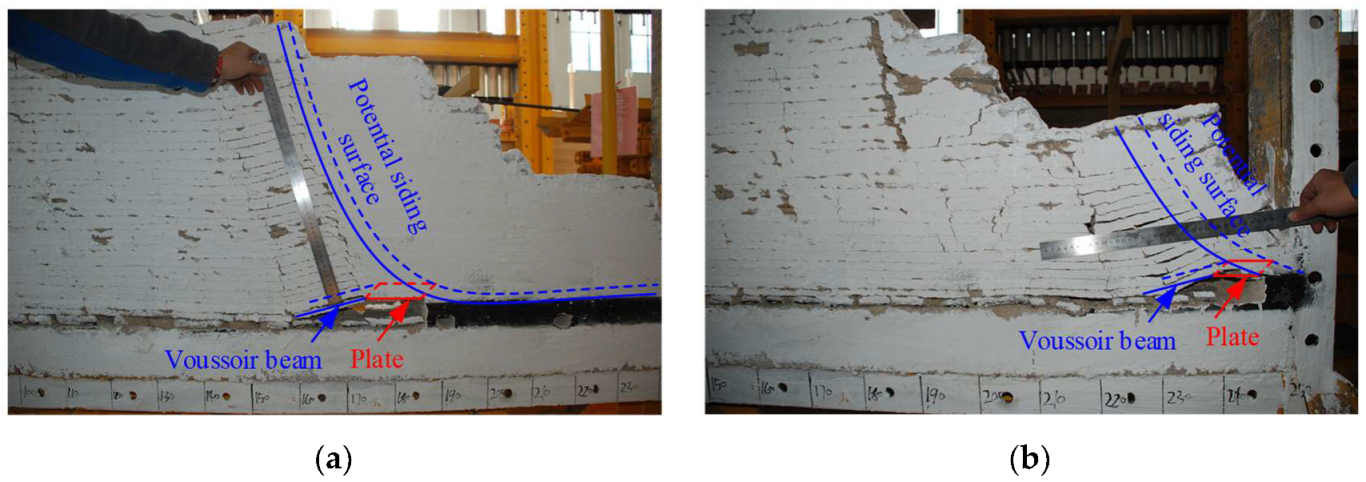
- When the working face advances for more than 30 m, there is also a sliding surface (called an inner sliding surface) in the slipping mass. The position of the inner sliding surface roughly coincides with the goaf boundary (Figure 14c–f). Moreover, because of the influence of mining subsidence, the rock mass near the boundary line undergoes shear failure due to subsidence, which decreases the strength. Chang, et al. [38] studied the rock damage evolution in the coordinated open pit with underground mining area using the numerical simulation method; the results showed that the slope damage was mainly caused by the collapse of underground goaf. Nevertheless, the original sliding surface is not smooth owing to the weak surface. It presents an obvious L-shaped broken line; therefore, the sliding body itself will considerably deform while sliding and constantly accumulate strain energy. Under the combined action of these two factors, the slipping mass will eventually cut along the rock mass with lower strength and the inner slip surface will form. The sliding body on the left of the inner sliding surface slides downward under gravity, and the sliding body on the right slides horizontally toward the free face due to the push from the slipping mass on the left.
3. Conclusions
- (1)
- The steps have obvious horizontal movement and deformation under the influence of underground mining disturbances. Taking the horizontal displacement at the slope tops of the steps as the deformation index, the entire disturbed slope can be divided into four regions: upper, middle-upper, middle-lower, and lower steps.
- (2)
- The weak interlayer is an important factor affecting the deformation of the disturbed slope. As the working face advances, the sliding distance of the weak surface increases. When the advance distance exceeds a certain value, the sliding distance increases considerably and the sliding distance of the lower weak plane exceeds that of the upper weak plane.
- (3)
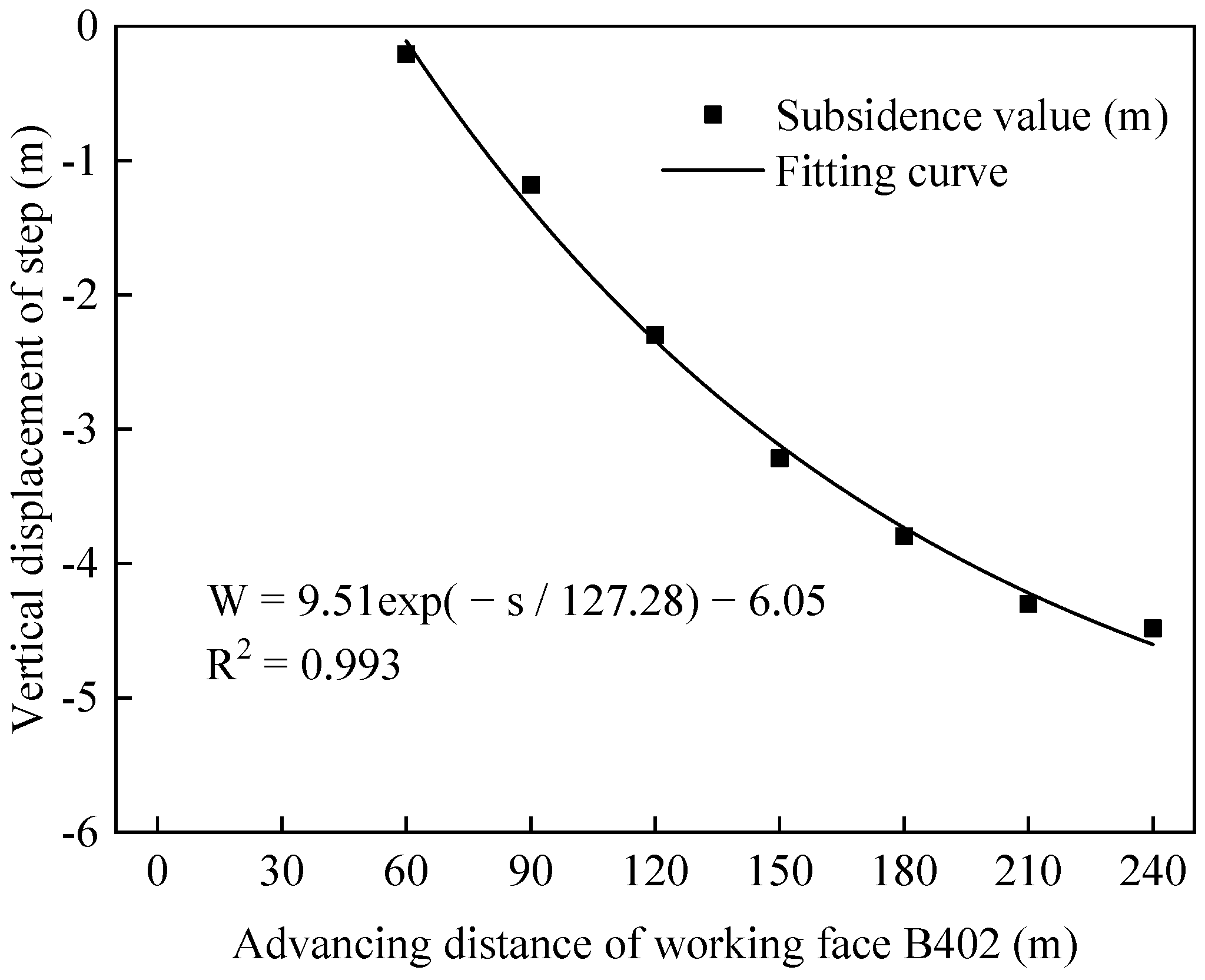
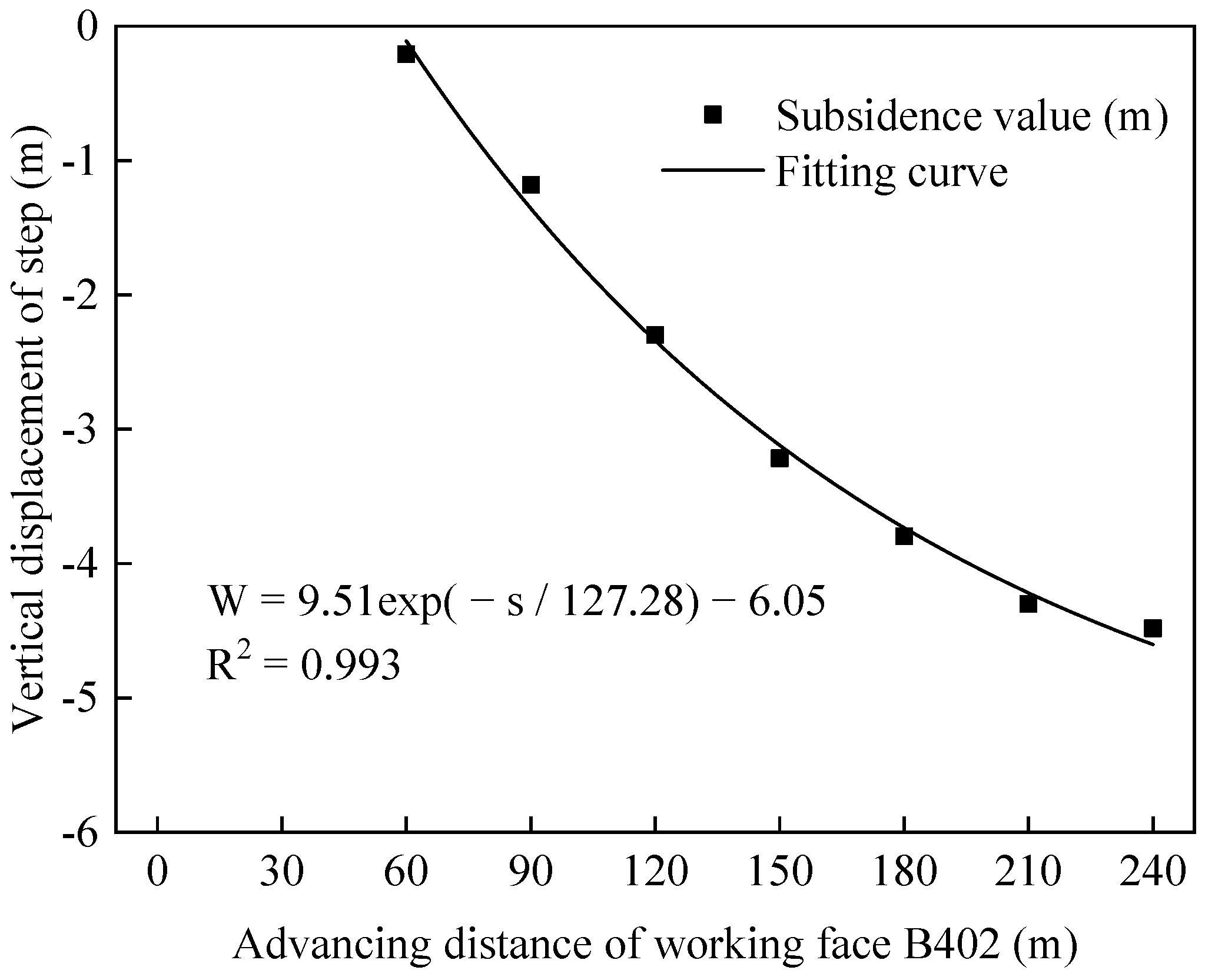
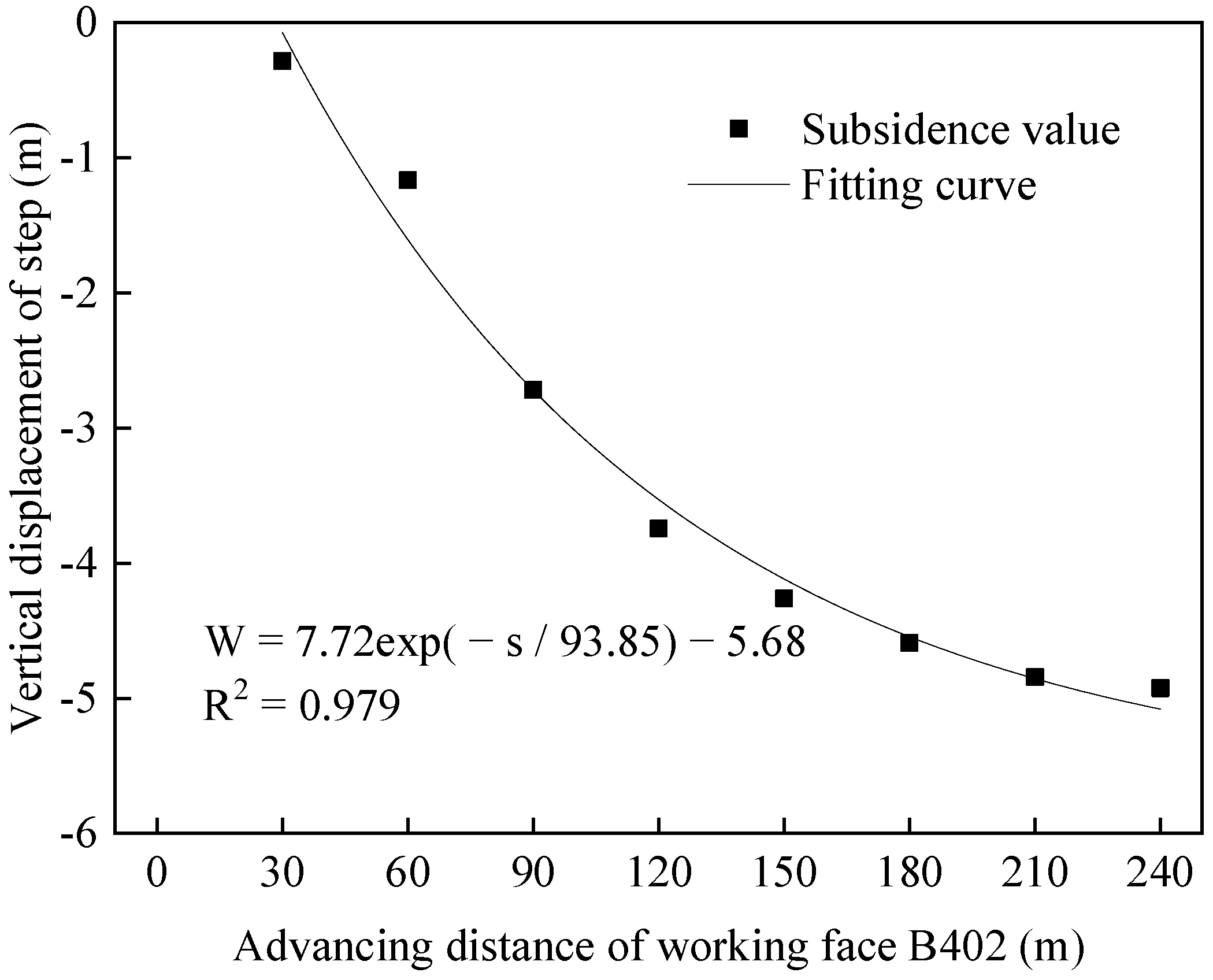
- When underground mining fully affects a step, its subsidence value first increases rapidly and then slowly. The exponential function can represent the change rule of the step-subsidence value during working face advancing.
- (4)
- The development of critical sliding surfaces can be tracked through the distribution of the plastic shear strain rate and deformation. In underground mining, the critical sliding surface of the slope will develop along the soft rock or coal seam, showing the L-shaped or W (double L)-shaped broken line. As the working face advances, the initial position of the sliding mass remains unchanged while the cutting position alternately changes up and down in the weak plane. When the advancing distance exceeds a certain value, the safety factor drops sharply, providing a basis for selecting an appropriate working face stop line.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Bakhtavar, E.; Shahriar, K.; Mirhassani, A. Optimization of the transition from open-pit to underground operation in combined mining using (0–1) integer programming. J. S. Afr. Inst. Min. Metall. 2012, 112, 1059–1064. [Google Scholar]
- Bakhtavar, E.; Shahriar, K.; Oraee, K. Mining method selection and optimization of transition from open pit to underground in combined mining. Arch. Min. Sci. 2009, 54, 481–493. [Google Scholar]
- Epstein, R.; Goic, M.; Weintraub, A.; Catalan, J.; Santibanez, P.; Urrutia, R.; Cancino, R.; Gaete, S.; Aguayo, A.; Caro, F. Optimizing Long-Term Production Plans in Underground and Open-Pit Copper Mines. Oper. Res. 2012, 60, 4–17. [Google Scholar] [CrossRef]
- Opoku, S.; Musingwini, C. Stochastic modelling of the open pit to underground transition interface for gold mines. Int. J. Min. Reclam. Environ. 2013, 27, 407–424. [Google Scholar] [CrossRef]
- Sokolov, I.V.; Smirnov, A.A.; Antipin, Y.G.; Baranovsky, K.V. Rational design of ore discharge bottom in transition from open pit to underground mining in udachny mine. J. Min. Sci. 2013, 49, 90–98. [Google Scholar] [CrossRef]
- Kalenchuk, K.; Falmagne, V.; Gelover, A.; Montiel, I.; Luzania, J. Risk Evaluation, Design, Implementation, Instrumentation, and Verification for Crown Pillar Extraction at Pinos Altos Mine. Rock Mech. Rock Eng. 2019, 52, 4997–5011. [Google Scholar] [CrossRef]
- Xu, S.; Suorineni, F.T.; An, L.; Li, Y.H.; Jin, C.Y. Use of an artificial crown pillar in transition from open pit to underground mining. Int. J. Rock Mech. Min. Sci. 2019, 117, 118–131. [Google Scholar] [CrossRef]
- Zhao, Y.; Yang, T.H.; Bohnhoff, M.; Zhang, P.H.; Yu, Q.L.; Zhou, J.R.; Liu, F.Y. Study of the Rock Mass Failure Process and Mechanisms During the Transformation from Open-Pit to Underground Mining Based on Microseismic Monitoring. Rock Mech. Rock Eng. 2018, 51, 1473–1493. [Google Scholar] [CrossRef]
- Liu, B.; Gao, Y.-T.; Jin, A.-B. Dynamic mechanical properties of an ore rock with varying grade and engineering applications in mines. Eng. Comput. 2021, 38, 2433–2445. [Google Scholar] [CrossRef]
- Wang, W.; Griffiths, D.V. Case study of slope failure during construction of an open pit mine in Indonesia. Can. Geotech. J. 2019, 56, 636–648. [Google Scholar] [CrossRef]
- Liu, K.W.; Yang, J.C.; Li, X.B.; Hao, H.; Li, Q.Y.; Liu, Z.X.; Wang, C.Y. Study on the long-hole raising technique using one blast based on vertical crater retreat multiple deck shots. Int. J. Rock Mech. Min. Sci. 2018, 109, 52–67. [Google Scholar] [CrossRef]
- Amann, F.; Le Gonidec, Y.; Senis, M.; Gschwind, S.; Wassermann, J.; Nussbaum, C.; Sarout, J. Analysis of acoustic emissions recorded during a mine-by experiment in an underground research laboratory in clay shales. Int. J. Rock Mech. Min. Sci. 2018, 106, 51–59. [Google Scholar] [CrossRef]
- Blanco-Martin, L.; Rutqvist, J. Foreword: Coupled Processes in Fractured Geological Media: Applied analysis in Deep Underground Tunneling, Mining and Nuclear Waste Disposal. Tunn. Undergr. Space Technol. 2020, 104, 103533. [Google Scholar] [CrossRef]
- Chandrakar, S.; Paul, P.S.; Sawmliana, C. Influence of void ratio on “Blast Pull” for different confinement factors of development headings in underground metalliferous mines. Tunn. Undergr. Space Technol. 2021, 108, 103716. [Google Scholar] [CrossRef]
- Osouli, A.; Bajestani, B.M. The interplay between moisture sensitive roof rocks and roof falls in an Illinois underground coal mine. Comput. Geotech. 2016, 80, 152–166. [Google Scholar] [CrossRef]
- Ding, Q.L.; Ju, F.; Mao, X.B.; Ma, D.; Yu, B.Y.; Song, S.B. Experimental Investigation of the Mechanical Behavior in Unloading Conditions of Sandstone After High-Temperature Treatment. Rock Mech. Rock Eng. 2016, 49, 2641–2653. [Google Scholar] [CrossRef]
- Ding, Q.L.; Ju, F.; Song, S.B.; Yu, B.Y.; Ma, D. An experimental study of fractured sandstone permeability after high-temperature treatment under different confining pressures. J. Nat. Gas Sci. Eng. 2016, 34, 55–63. [Google Scholar] [CrossRef]
- Ding, Q.-L.; Wang, P.; Cheng, Z. Influence of temperature and confining pressure on the mechanical properties of granite. Powder Technol. 2021, 394, 10–19. [Google Scholar] [CrossRef]
- Ding, Q.-L.; Wang, P.; Cheng, Z. Permeability evolution of fractured granite after exposure to different high-temperature treatments. J. Pet. Sci. Eng. 2022, 208, 109632. [Google Scholar] [CrossRef]
- Zhou, J.; Chen, C.; Du, K.; Jahed Armaghani, D.; Li, C. A new hybrid model of information entropy and unascertained measurement with different membership functions for evaluating destressability in burst-prone underground mines. Eng. Comput. 2020, 38, 381–399. [Google Scholar] [CrossRef]
- Kahraman, S.; Aloglu, A.S.; Aydin, B.; Saygin, E. The needle penetration index to estimate the performance of an axial type roadheader used in a coal mine. Geomech. Geophys. Geo-Energy Geo-Resour. 2019, 5, 37–45. [Google Scholar] [CrossRef]
- Tan, Y.; Ma, Q.; Zhao, Z.; Gu, Q.; Fan, D.; Song, S.; Huang, D. Cooperative bearing behaviors of roadside support and surrounding rocks along gob-side. Geomech. Eng. 2019, 18, 439–448. [Google Scholar]
- Chen, Y.; Xiao, P.; Du, X.; Wang, S.; Wang, Z.; Azzam, R. Study on Damage Statistical Constitutive Model of Triaxial Compression of Acid-Etched Rock under Coupling Effect of Temperature and Confining Pressure. Materials 2021, 14, 7414. [Google Scholar] [CrossRef]
- Liu, F.Y.; Yang, T.H.; Zhou, J.R.; Deng, W.X.; Yu, Q.L.; Zhang, P.H.; Cheng, G.W. Spatial Variability and Time Decay of Rock Mass Mechanical Parameters: A Landslide Study in the Dagushan Open-Pit Mine. Rock Mech. Rock Eng. 2020, 53, 3031–3053. [Google Scholar] [CrossRef]
- Amini, M.; Ardestani, A. Stability analysis of the north-eastern slope of Daralou copper open pit mine against a secondary toppling failure. Eng. Geol. 2019, 249, 89–101. [Google Scholar] [CrossRef]
- Azarfar, B.; Ahmadvand, S.; Sattarvand, J.; Abbasi, B. Stability Analysis of Rock Structure in Large Slopes and Open-Pit Mine: Numerical and Experimental Fault Modeling. Rock Mech. Rock Eng. 2019, 52, 4889–4905. [Google Scholar] [CrossRef]
- Ferentinou, M.; Fakir, M. Integrating Rock Engineering Systems device and Artificial Neural Networks to predict stability conditions in an open pit. Eng. Geol. 2018, 246, 293–309. [Google Scholar] [CrossRef]
- Pandit, B.; Tiwari, G.; Latha, G.M.; Babu, G.L.S. Stability Analysis of a Large Gold Mine Open-Pit Slope Using Advanced Probabilistic Method. Rock Mech. Rock Eng. 2018, 51, 2153–2174. [Google Scholar] [CrossRef]
- Ding, Q.L.; Song, S.B. Experimental Investigation of the Relationship between the P-Wave Velocity and the Mechanical Properties of Damaged Sandstone. Adv. Mater. Sci. Eng. 2016, 2016, 7654234. [Google Scholar] [CrossRef] [Green Version]
- Chen, L.; Zhao, C.; Li, B.; He, K.; Ren, C.; Liu, X.; Liu, D. Deformation monitoring and failure mode research of mining-induced Jianshanying landslide in karst mountain area, China with ALOS/PALSAR-2 images. Landslides 2021, 18, 2739–2750. [Google Scholar] [CrossRef]
- Mikroutsikos, A.; Theocharis, A.I.; Koukouzas, N.C.; Zevgolis, I.E. Slope stability of deep surface coal mines in the presence of a weak zone. Geomech. Geophys. Geo-Energy Geo-Resour. 2021, 7, 66. [Google Scholar] [CrossRef]
- Booth, A.J.; Marshall, A.M.; Stace, R. Probabilistic analysis of a coal mine roadway including correlation control between model input parameters. Comput. Geotech. 2016, 74, 151–162. [Google Scholar] [CrossRef]
- Dong, X.; Karrech, A.; Basarir, H.; Elchalakani, M.; Seibi, A. Energy Dissipation and Storage in Underground Mining Operations. Rock Mech. Rock Eng. 2019, 52, 229–245. [Google Scholar] [CrossRef]
- Gholampour, A.; Johari, A. Reliability analysis of a vertical cut in unsaturated soil using sequential Gaussian simulation. Sci. Iran. 2019, 26, 1214–1231. [Google Scholar] [CrossRef] [Green Version]
- Johari, A.; Fooladi, H. Comparative study of stochastic slope stability analysis based on conditional and unconditional random field. Comput. Geotech. 2020, 125, 103707. [Google Scholar] [CrossRef]
- Tang, H.; Shao, L. Finite element analysis on slope stability of earth-rock dam under earthquake. Yanshilixue Yu Gongcheng Xuebao/Chin. J. Rock Mech. Eng. 2004, 23, 1318–1324. [Google Scholar]
- Zhu, J.; Liu, X.; Feng, J.; Wu, J. Study on slope stability and optimization of boundary parameters under condition of combined open-underground mining. Yanshilixue Yu Gongcheng Xuebao/Chin. J. Rock Mech. Eng. 2009, 28 (Suppl. S2), 3971–3977. [Google Scholar]
- Chang, L.-S.; Li, S.-C.; Yan, T.-Y. Slope stability in surface and underground combined mining based on rock mass damage simulation. Meitan Xuebao/J. China Coal Soc. 2014, 39, 359–365. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Lithology | Thickness (m) | Poisson Ratio μ | Young’s Modulus E (GPa) | Tensile Strength σt (Mpa) | Cohesion c (Mpa) | Internal Friction Angle f (°) | Density ρ (kg/m3) |
|---|---|---|---|---|---|---|---|
| Yellow earth | 42 | 0.42 | 0.015 | 0.0125 | 0.125 | 18 | 1960 |
| Weathered sandstone | 14 | 0.36 | 2.0 | 0.2500 | 2.500 | 38 | 2300 |
| Sandstone 1 | 30 | 0.32 | 4.2 | 0.3000 | 3.000 | 39 | 2380 |
| Mudstone | 24 | 0.34 | 2.8 | 0.2000 | 2.000 | 38 | 2490 |
| Silty sandstone 1 | 12 | 0.32 | 4.6 | 0.3500 | 3.500 | 36 | 2320 |
| Sandstone 2 | 12 | 0.30 | 5.5 | 0.4000 | 4.000 | 40 | 2380 |
| 4# Coal seam | 8 | 0.38 | 1.0 | 0.2950 | 1.620 | 36 | 1440 |
| Shale 1 | 10 | 0.33 | 2.4 | 0.3000 | 3.000 | 42 | 2450 |
| Silty sandstone 2 | 14 | 0.32 | 4.8 | 0.5000 | 5.000 | 38 | 2600 |
| Shale 2 | 8 | 0.35 | 3.0 | 0.5000 | 5.000 | 38 | 2580 |
| 9# Coal seam | 13 | 0.36 | 1.2 | 0.2950 | 1.620 | 39 | 1330 |
| Sandstone 3 | 10 | 0.28 | 6.9 | 0.5000 | 5.000 | 41 | 2380 |
| 11# Coal seam | 5 | 0.35 | 1.3 | 0.2950 | 1.620 | 36 | 1400 |
| Sandstone 4 | 18 | 0.25 | 12.0 | 0.5000 | 5.000 | 44 | 2600 |
| Advancing Distance (m) | 30 | 60 | 90 | 120 | 150 | 180 | 210 | 240 |
|---|---|---|---|---|---|---|---|---|
| Step 1404 | −0.123 | −0.693 | −0.860 | −0.642 | −0.386 | 0.071 | 0.733 | 0.955 |
| Step 1398 | −0.029 | 0.059 | −0.664 | −0.857 | −0.631 | −0.110 | 0.829 | 1.260 |
| Step 1394 | 0.013 | 0.583 | 0.820 | 0.219 | −0.429 | −0.115 | 0.866 | 1.445 |
| Step 1379 | 0.031 | 0.618 | 1.006 | 1.286 | 1.530 | 0.548 | 1.135 | 1.684 |
| Step 1359 | 0.032 | 0.628 | 1.035 | 1.360 | 1.741 | 2.210 | 1.773 | 1.940 |
| Step 1355 | 0.032 | 0.629 | 1.036 | 1.361 | 1.750 | 2.246 | 2.007 | 2.129 |
| Step 1345 | 0.029 | 0.634 | 1.041 | 1.369 | 1.788 | 2.410 | 3.542 | 4.022 |
| Step 1333 | 0.027 | 0.635 | 1.042 | 1.371 | 1.789 | 2.411 | 3.547 | 4.064 |
| Step 1323 | 0.026 | 0.637 | 1.044 | 1.372 | 1.792 | 2.416 | 3.555 | 4.078 |
| Step 1315 | 0.024 | 0.642 | 1.047 | 1.375 | 1.796 | 2.424 | 3.567 | 4.099 |
| Step 1309 | 0.022 | 0.262 | 0.783 | 0.835 | 1.013 | 1.380 | 2.140 | 2.006 |
| Step 1305 | 0.022 | 0.263 | 0.783 | 0.836 | 1.013 | 1.380 | 2.140 | 2.007 |
| Step 1287 | 0.022 | 0.264 | 0.786 | 0.838 | 1.016 | 1.382 | 2.142 | 2.009 |
| Step 1269 | 0.002 | 0.000 | −0.002 | −0.002 | 0.000 | 0.001 | 0.001 | 0.002 |
| Step 1262 | 0.002 | 0.000 | −0.001 | −0.001 | 0.001 | 0.001 | 0.002 | 0.002 |
| Step 1258 | 0.001 | 0.000 | 0.000 | 0.000 | 0.001 | 0.001 | 0.001 | 0.001 |
| Step 1220 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 |
| Advancing Distance (m) | 30 | 60 | 90 | 120 | 150 | 180 | 210 | 240 |
|---|---|---|---|---|---|---|---|---|
| Step 1404 | −0.282 | −1.165 | −2.716 | −3.743 | −4.260 | −4.590 | −4.842 | −4.925 |
| Step 1398 | −0.029 | −0.207 | −1.182 | −2.299 | −3.217 | −3.796 | −4.300 | −4.482 |
| Step 1394 | −0.005 | −0.013 | −0.072 | −0.501 | −1.149 | −2.162 | −3.301 | −3.891 |
| Step 1379 | −0.002 | −0.004 | −0.007 | −0.023 | −0.059 | −0.355 | −1.576 | −2.630 |
| Step 1359 | −0.002 | −0.004 | −0.005 | −0.008 | −0.015 | −0.042 | −0.423 | −1.396 |
| Step 1355 | −0.002 | −0.003 | −0.004 | −0.006 | −0.005 | −0.008 | −0.063 | −0.982 |
| Step 1345 | −0.002 | −0.002 | −0.003 | −0.002 | −0.002 | −0.004 | −0.008 | 0.057 |
| Step 1333 | −0.001 | 0.001 | 0.000 | 0.001 | 0.002 | 0.004 | 0.006 | 0.012 |
| Step 1323 | −0.001 | 0.002 | 0.001 | 0.002 | 0.004 | 0.006 | 0.009 | 0.017 |
| Step 1315 | 0.000 | 0.005 | 0.003 | 0.008 | 0.013 | 0.020 | 0.028 | 0.043 |
| Step 1309 | −0.001 | −0.001 | −0.001 | −0.001 | −0.001 | −0.001 | −0.002 | −0.002 |
| Step 1305 | 0.000 | 0.001 | 0.002 | 0.001 | 0.001 | 0.001 | 0.000 | 0.000 |
| Step 1287 | 0.001 | 0.002 | 0.003 | 0.002 | 0.002 | 0.001 | 0.001 | 0.001 |
| Step 1269 | 0.000 | 0.001 | 0.002 | 0.002 | 0.001 | 0.001 | 0.001 | 0.000 |
| Step 1262 | 0.000 | 0.001 | 0.002 | 0.002 | 0.001 | 0.001 | 0.000 | 0.000 |
| Step 1258 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 |
| Step 1220 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, Q.-L.; Peng, Y.-Y.; Cheng, Z.; Wang, P. Numerical Simulation of Slope Stability during Underground Excavation Using the Lagrange Element Strength Reduction Method. Minerals 2022, 12, 1054. https://doi.org/10.3390/min12081054
Ding Q-L, Peng Y-Y, Cheng Z, Wang P. Numerical Simulation of Slope Stability during Underground Excavation Using the Lagrange Element Strength Reduction Method. Minerals. 2022; 12(8):1054. https://doi.org/10.3390/min12081054
Chicago/Turabian StyleDing, Qi-Le, Yan-Yan Peng, Zheng Cheng, and Peng Wang. 2022. "Numerical Simulation of Slope Stability during Underground Excavation Using the Lagrange Element Strength Reduction Method" Minerals 12, no. 8: 1054. https://doi.org/10.3390/min12081054
APA StyleDing, Q.-L., Peng, Y.-Y., Cheng, Z., & Wang, P. (2022). Numerical Simulation of Slope Stability during Underground Excavation Using the Lagrange Element Strength Reduction Method. Minerals, 12(8), 1054. https://doi.org/10.3390/min12081054