
Soil Erosion Monitoring in Quarry Restoration Using Drones


Abstract
:1. Introduction
2. Materials and Methods
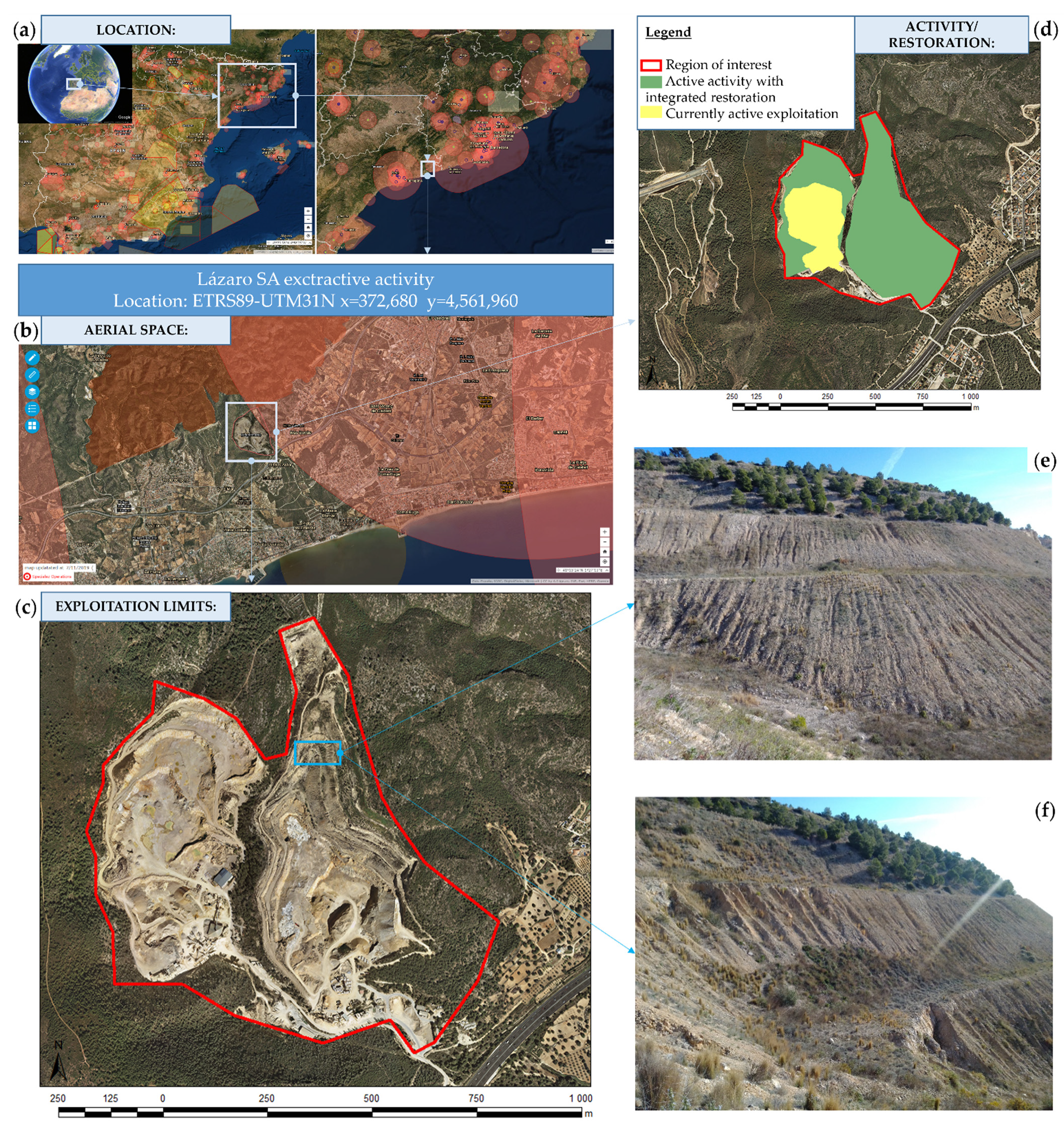
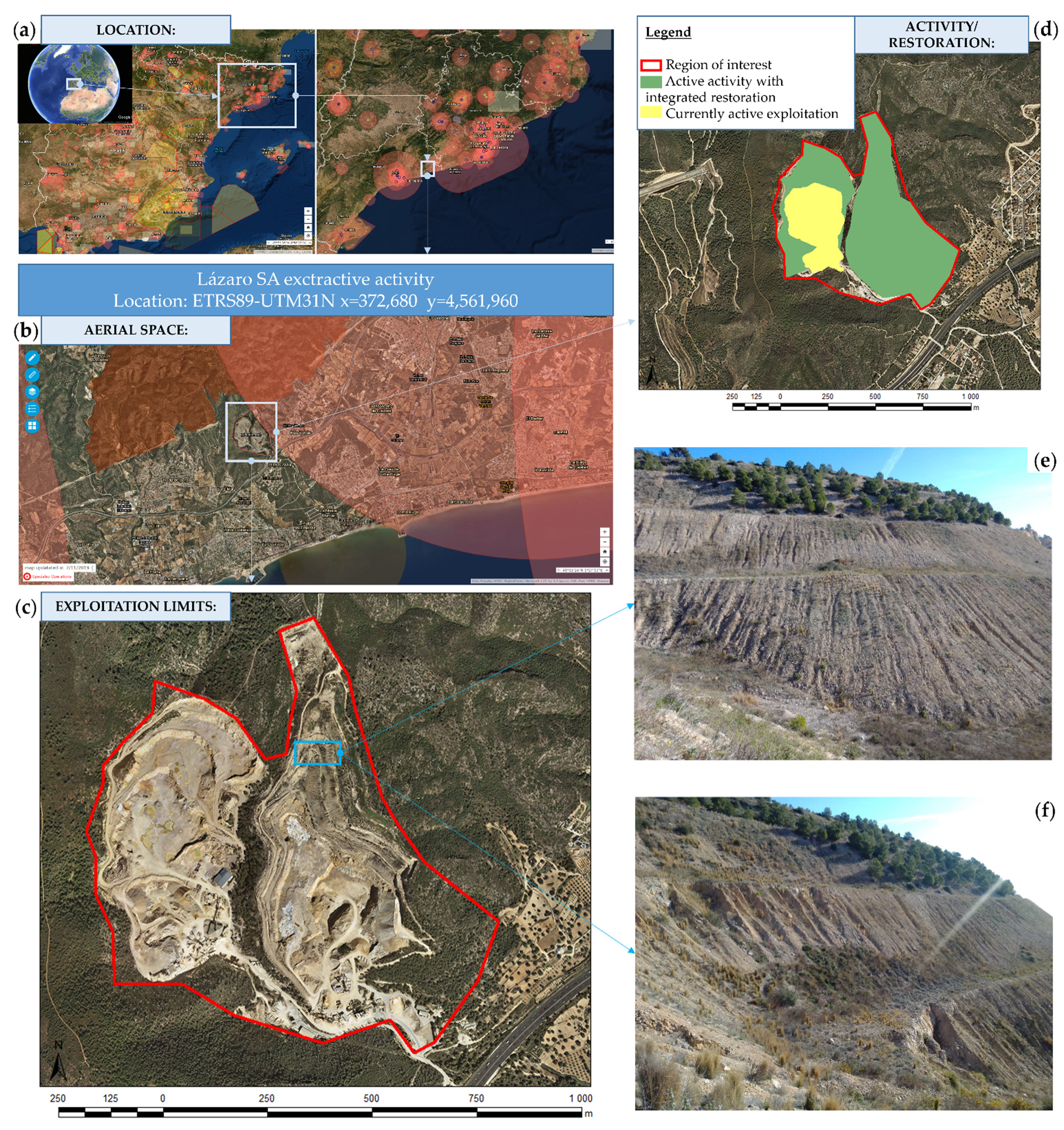
2.1. Study Area
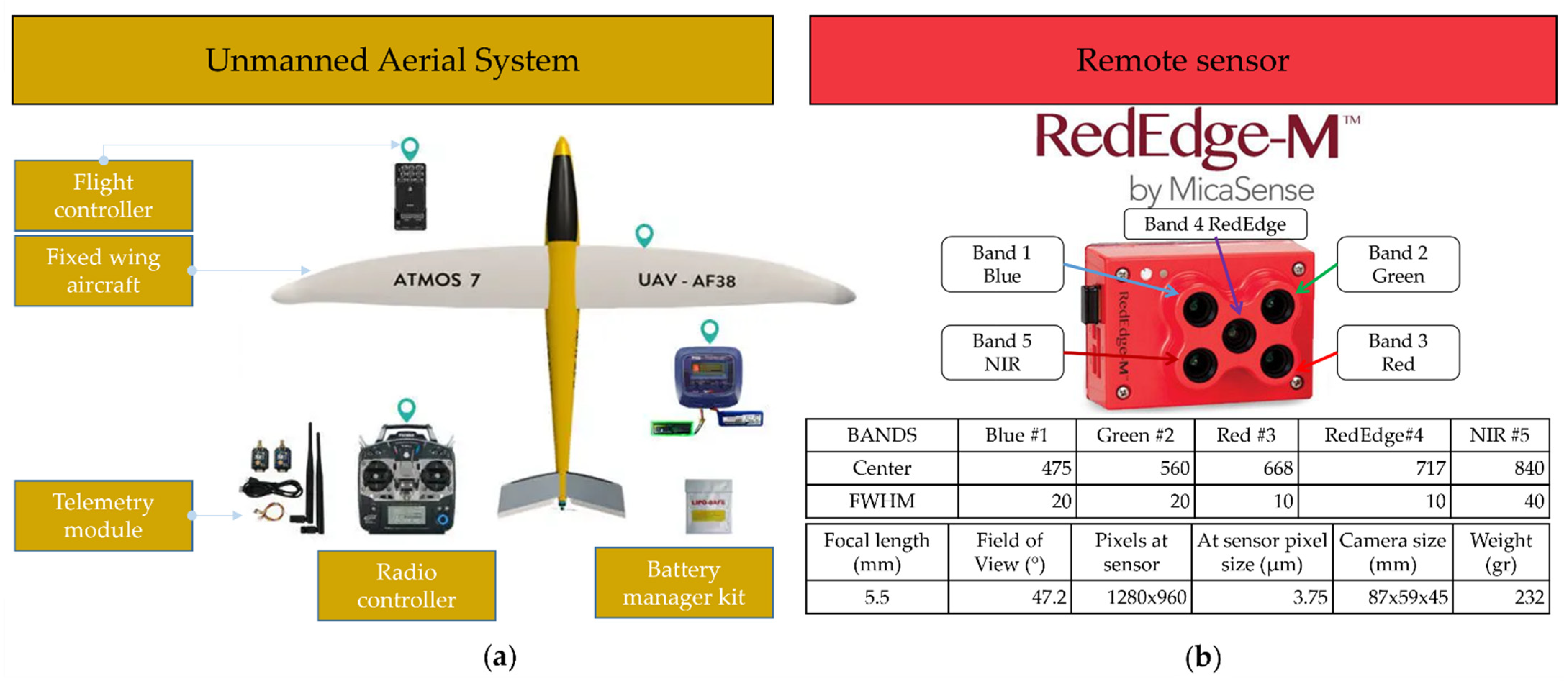
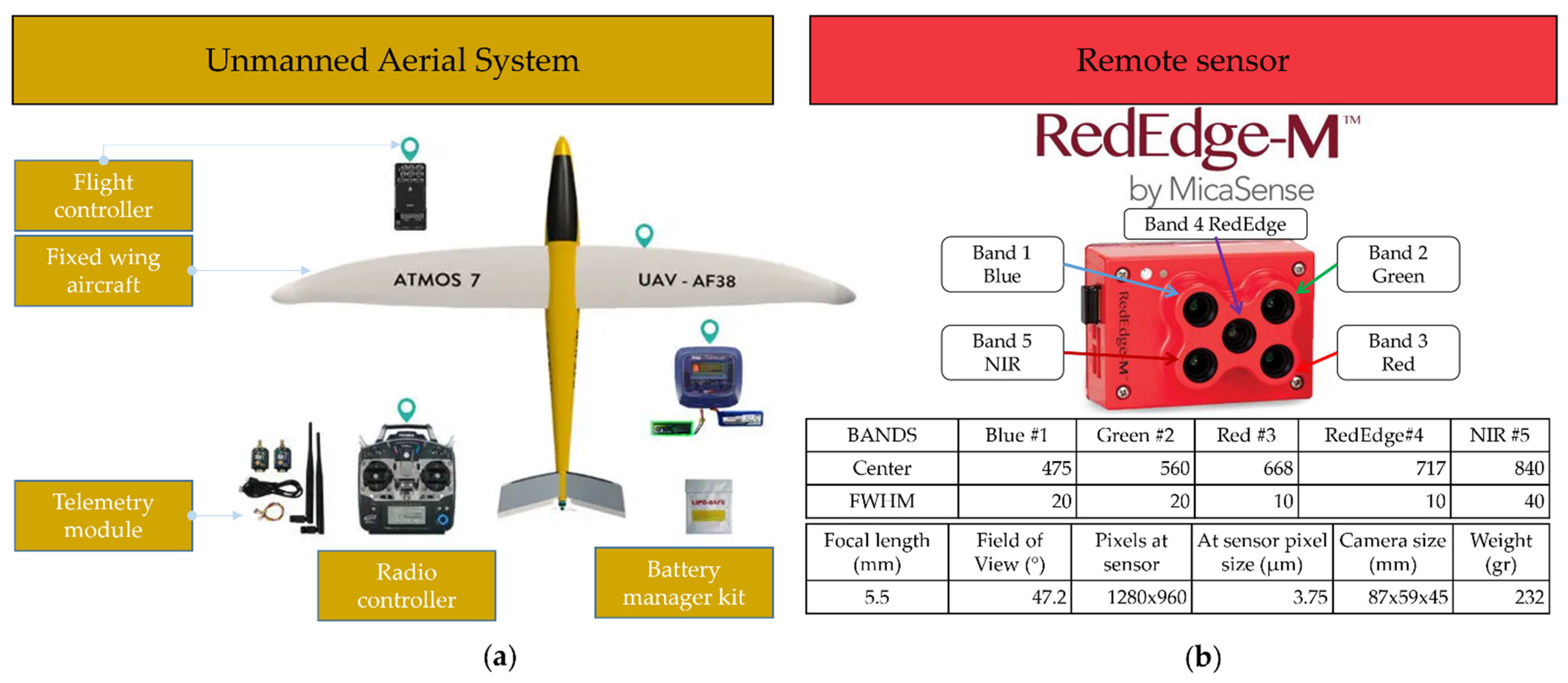
2.2. Unmanned Aerial Systems (UAS)
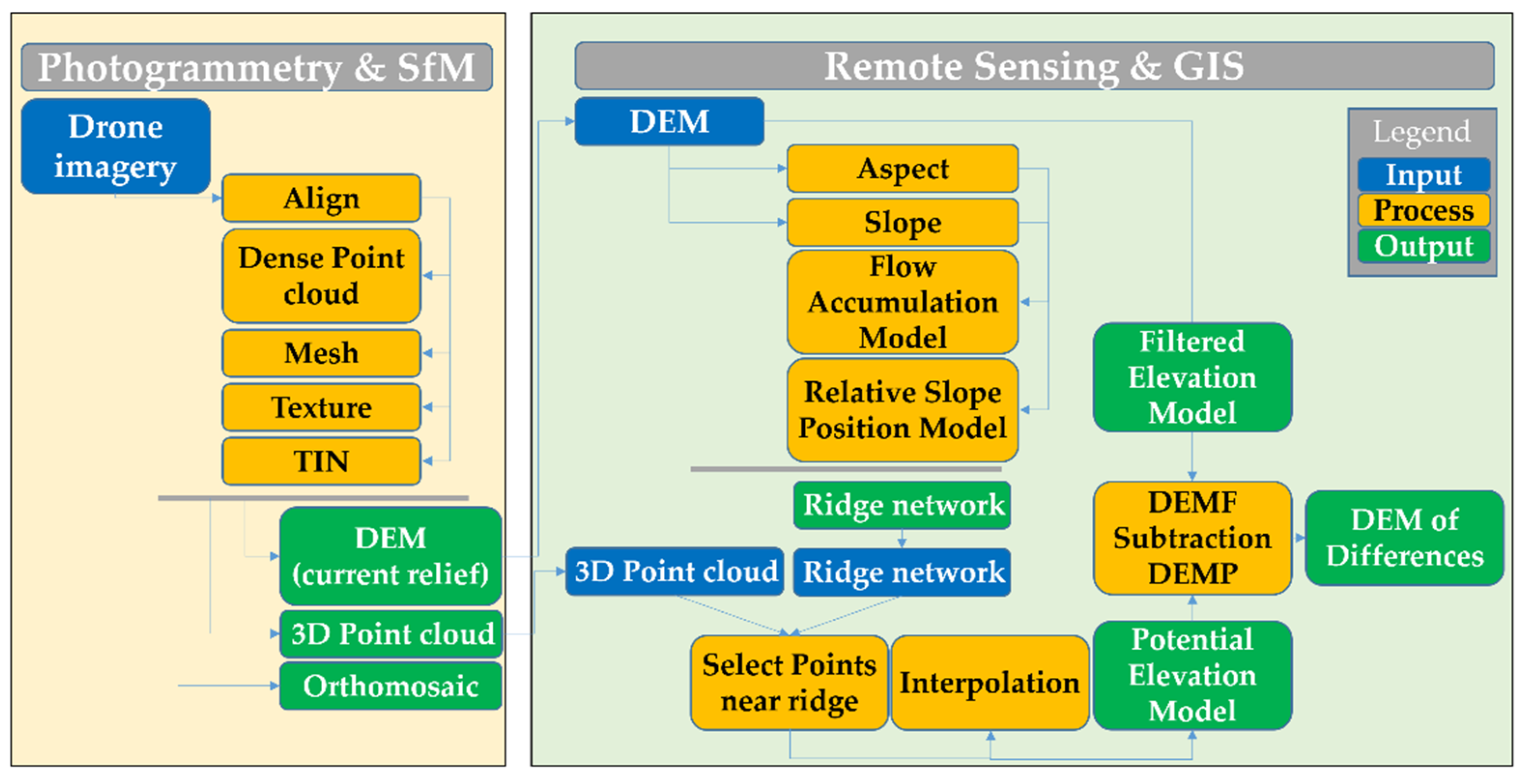
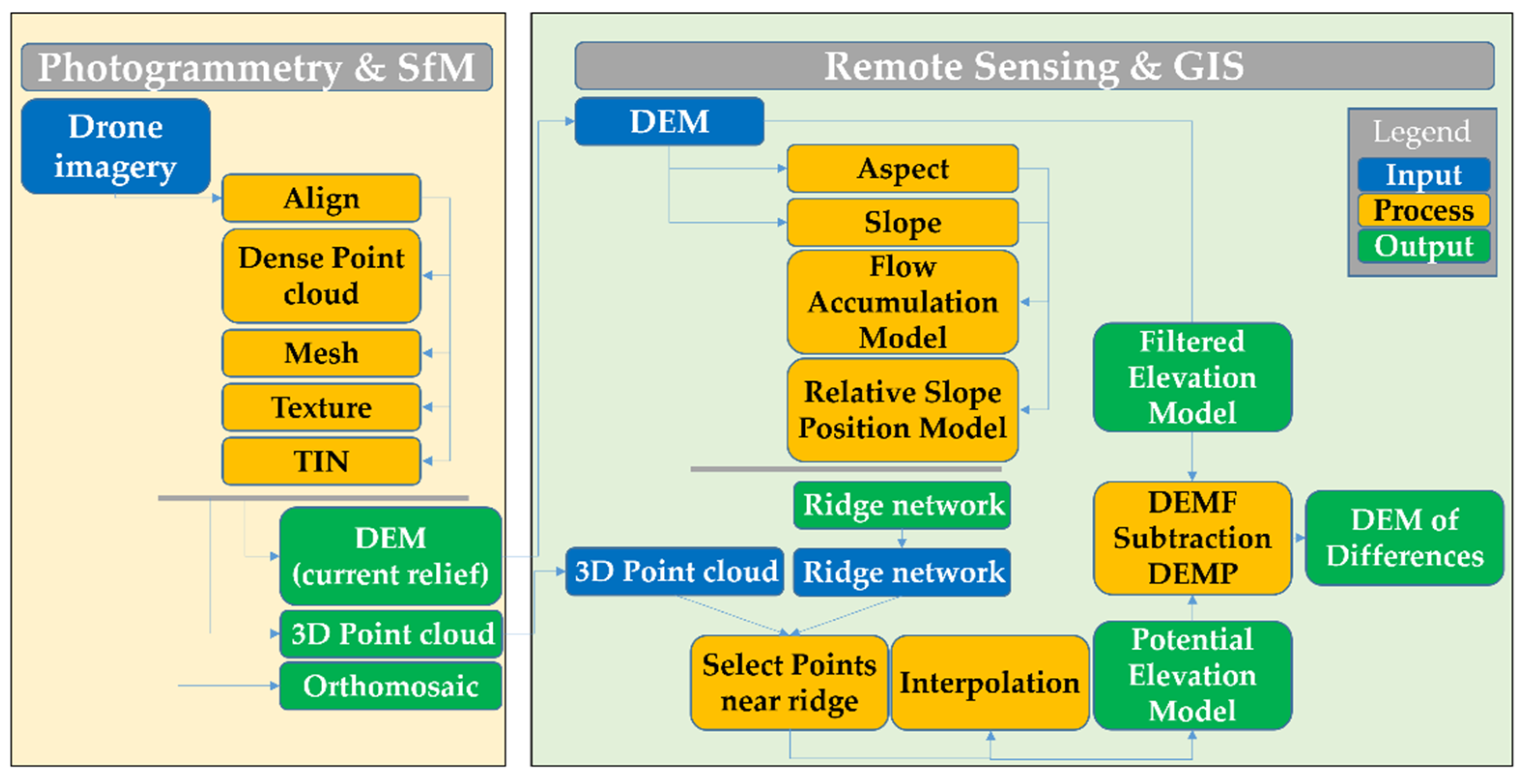
2.3. Data Processing
3. Results
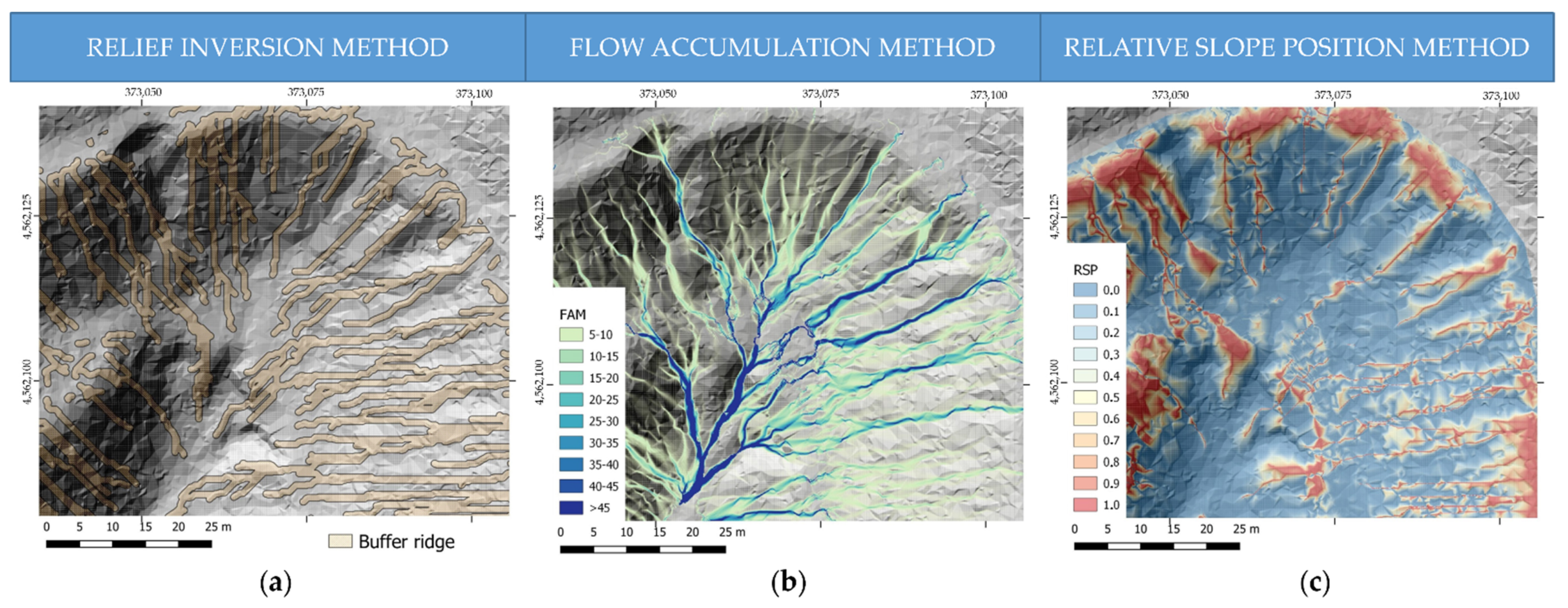
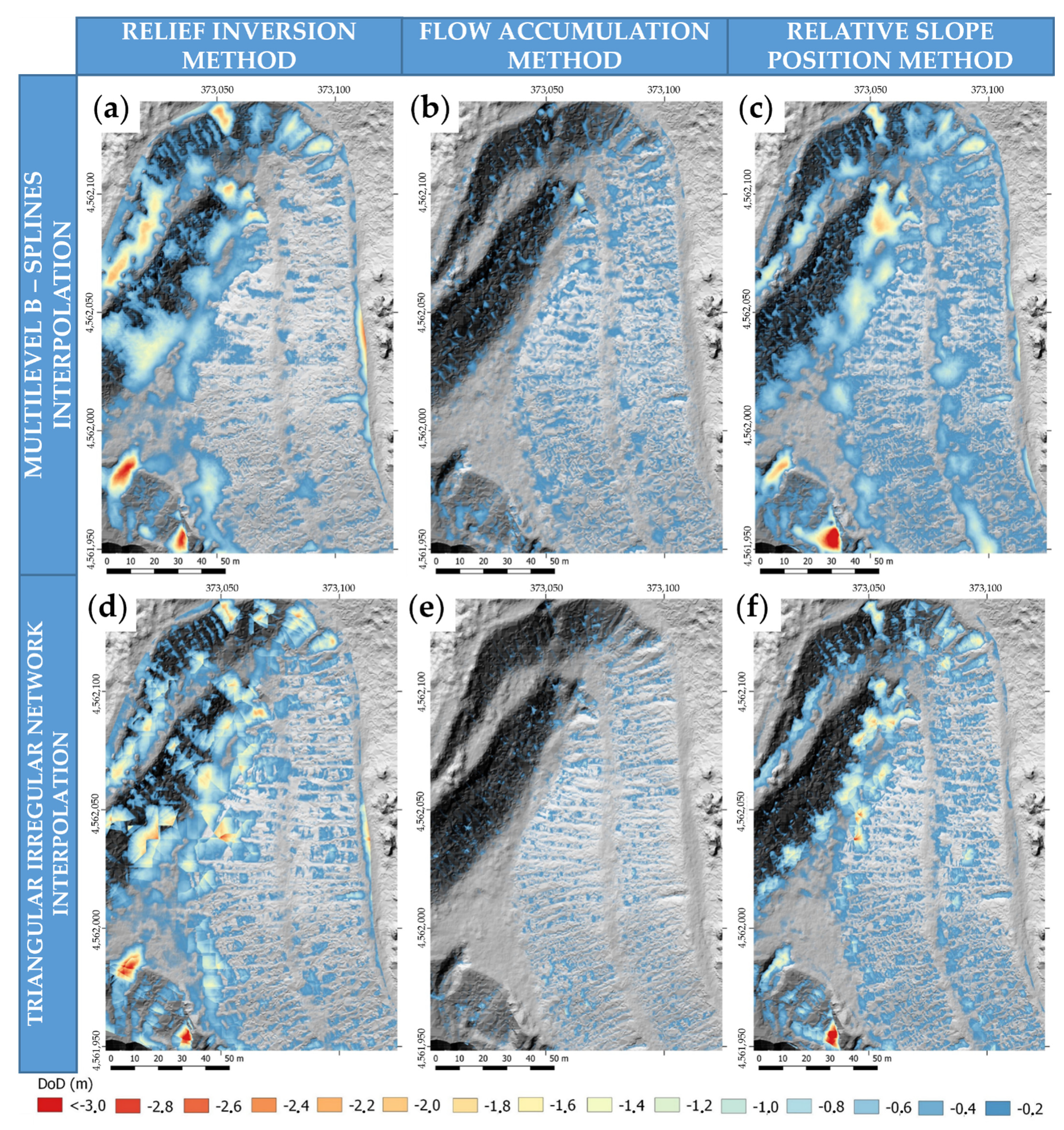
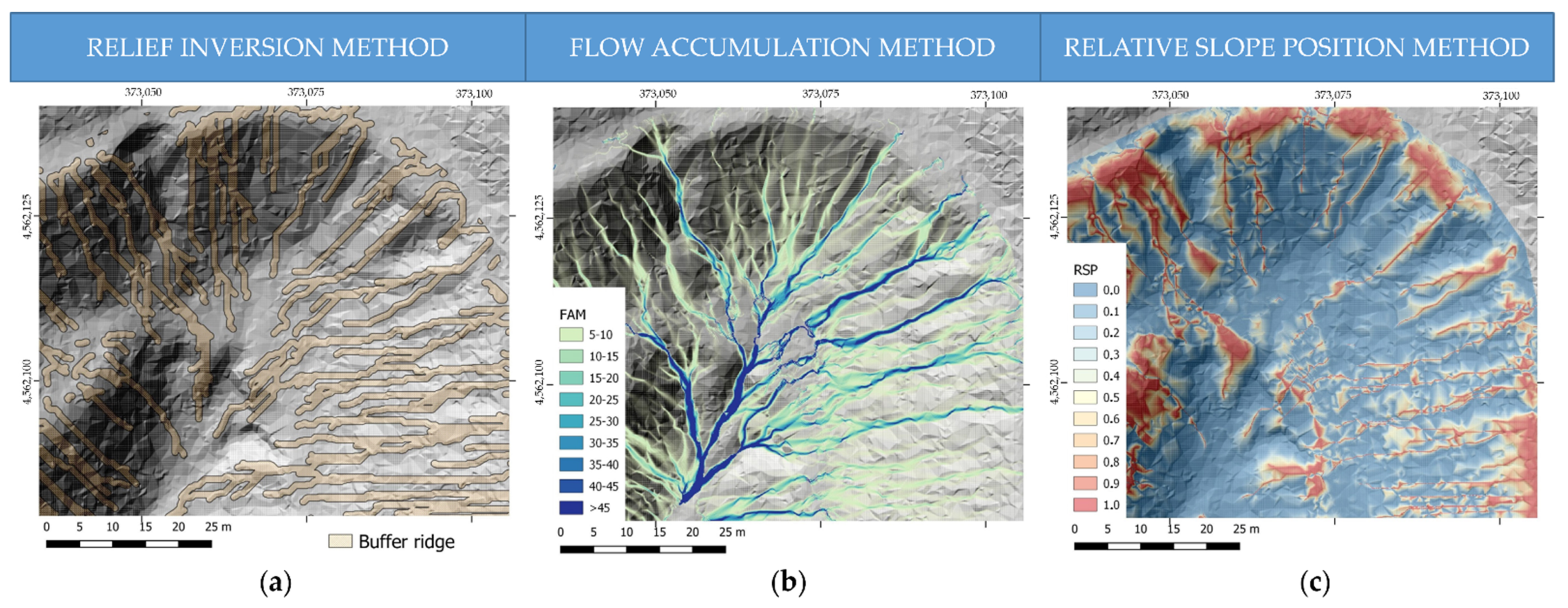
3.1. Gully Detection Methods
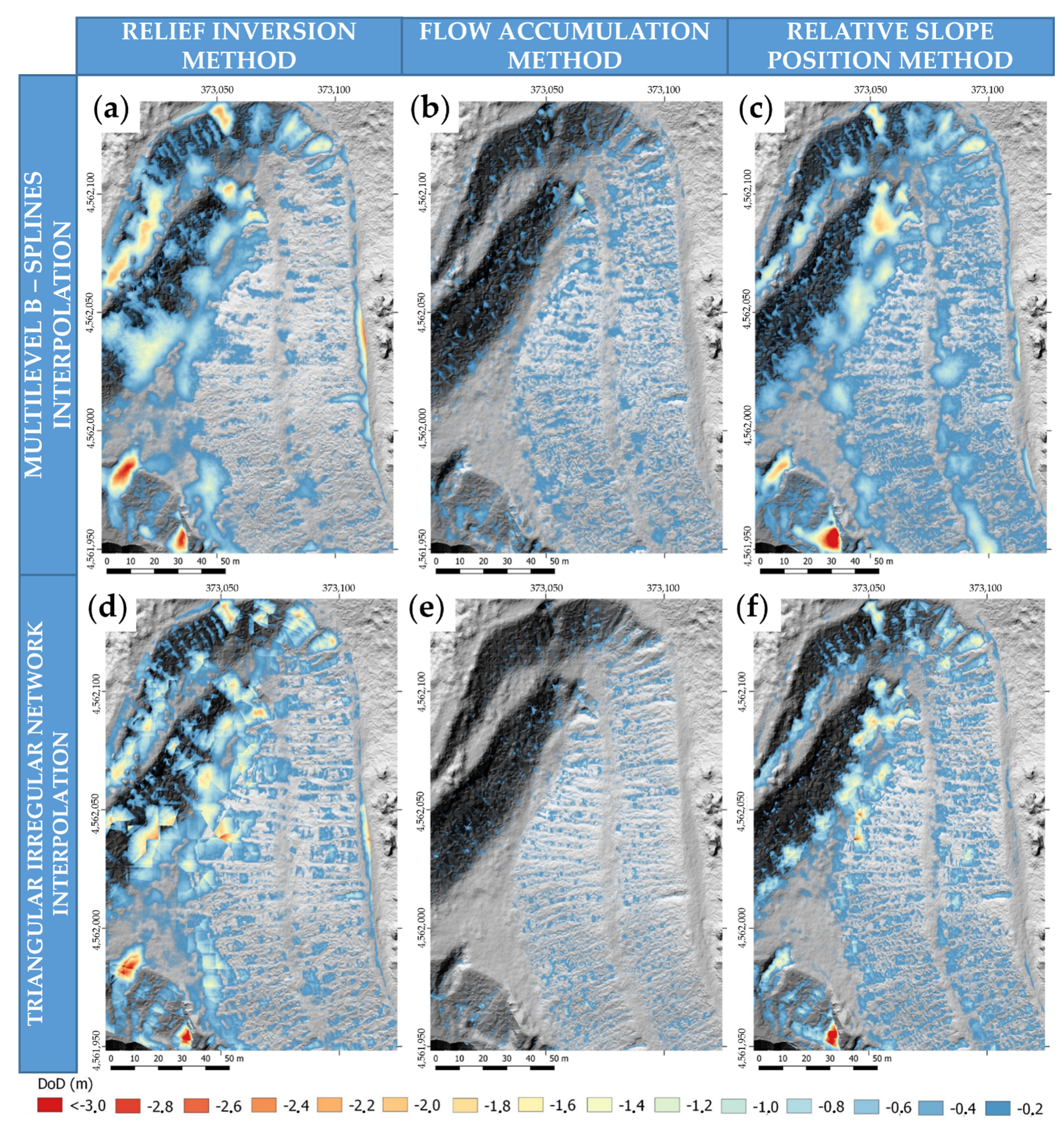
3.2. DEM of Differences (DoD)
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ren, H.; Zhao, Y.; Xiao, W.; Hu, Z. A review of UAS monitoring in mining areas: Current status and future perspectives. Int. J. Coal Sci. Technol. 2019, 6, 320–333. [Google Scholar] [CrossRef] [Green Version]
- Xiao, W.; Chen, J.; Zhao, J.; Hu, Z.; Zhang, S. Identify Maize chlorophyll impacted by coal mining subsidence in high groundwater table area based on UAS remote sensing. J. China Coal Soc. 2019, 44, 302–313. [Google Scholar] [CrossRef]
- Carabassa, V.; Montero, P.; Crespo, M.; Padró, J.C.; Pons, X.; Balagué, J.; Brotons, L.; Alcañiz, J.M. Unmanned aerial system protocol for quarry restoration and mineral extraction monitoring. JEMA 2020, 270, 110717. [Google Scholar] [CrossRef]
- Vanmaercke, M.; Poesen, J.; Van Mele, B.; Demuzere, M.; Bruynseels, A.; Golosov, V.; Bezerra, J.F.R.; Bolysov, S.; Dvinskih, A.; Frankl, A.; et al. How fast do gully headcuts retreat? Earth-Sci. Rev. 2016, 154, 336–355. [Google Scholar] [CrossRef]
- Zabihi, M.; Mirchooli, F.; Motevalli, A.; Khaledi Darvishan, A.; Pourghasemi, H.R.; Zakeri, M.A.; Sadighi, F. Spatial modelling of gully erosion in Mazandaran Province, northern Iran. Catena 2018, 161, 1–13. [Google Scholar] [CrossRef]
- Nicu, I.C. Is digital shoreline analysis system “fit” for gully erosion assessment? Catena 2021, 203, 105307. [Google Scholar] [CrossRef]
- Lindsay, J.B.; Seibert, J. Measuring the significance of a divide to local drainage patterns. IJGIS 2013, 27, 1453–1468. [Google Scholar] [CrossRef]
- Esposito, G.; Mastrorocco, G.; Salvini, R.; Oliveti, M.; Starita, P. Application of UAS photogrammetry for the multi-temporal estimation of surface extent and volumetric excavation in the Sa Pigada Bianca open-pit mine, Sardinia, Italy. Environ. Earth Sci. 2017, 76, 103–118. [Google Scholar] [CrossRef]
- Guirado, R.; Padró, J.-C.; Zoroa, A.; Olivert, J.; Bukva, A.; Cavestany, P. StratoTrans: Unmanned Aerial System (UAS) 4G Communication Framework Applied on the Monitoring of Road Traffic and Linear Infrastructure. Drones 2021, 5, 10. [Google Scholar] [CrossRef]
- Jaramillo, R.; Padró, J.-C. Generación de cartografía a partir de imágenes captadas con dron de ala fija, asociada a proyectos hidráulicos fluviales. GeoFocus 2020, 26, 93–117. [Google Scholar] [CrossRef]
- Padró, J.C.; Muñoz, F.J.; Avila, L.A.; Pesquer, L.; Pons, X. Radiometric Correction of Landsat-8 and Sentinel-2A Scenes Using Drone Imagery in Synergy with Field Spectroradiometry. Remote Sens. 2018, 10, 1687. [Google Scholar] [CrossRef] [Green Version]
- Padró, J.C.; Muñoz, F.J.; Planas, J.; Pons, X. Comparison of four UAV georeferencing methods for environmental monitoring purposes focusing on the combined use with airborne and satellite remote sensing platforms. IJAEO 2019, 79, 130–140. [Google Scholar] [CrossRef]
- Honarmand, M.; Shahriari, H. Geological Mapping Using Drone-Based Photogrammetry: An Application for Exploration of Vein-Type Cu Mineralization. Minerals 2021, 11, 585. [Google Scholar] [CrossRef]
- Jackisch, R.; Lorenz, S.; Zimmermann, R.; Möckel, R.; Gloaguen, R. Drone-Borne hyperspectral monitoring of acid mine drainage: An example from the Sokolov Lignite District. Remote Sens. 2018, 10, 385. [Google Scholar] [CrossRef] [Green Version]
- Niculita, M.; Mărgărint, M.C.; Tarolli, P. Using UAV and LiDAR data for gully geomorphic changes monitoring. Dev. Earth Surf. Process. 2020, 23, 271–315. [Google Scholar] [CrossRef]
- Padró, J.C.; Carabassa, V.; Balagué, J.; Brotons, L.; Alcañiz, J.M.; Pons, X. Monitoring opencast mine restorations using Unmanned Aerial System (UAS) imagery. Sci. Total Environ. 2019, 657, 1602–1614. [Google Scholar] [CrossRef]
- Eltner, A.; Mulsow, C.; Maas, H.G. Quantitative Measurement of Soil Erosion from TLS and UAS Data. ISRPS 2013, 40, 119–124. [Google Scholar] [CrossRef] [Green Version]
- INECO. Ministerio de Transporte, Movilidad y Agenda Urbana. Available online: https://www.mitma.gob.es/recursos_mfom/paginabasica/recursos/12t3750_03-geologia-y-proc-de-materiales.pdf (accessed on 21 June 2021).
- CATUAV. Available online: https://www.catuav.com/drones/atmos7-3/ (accessed on 21 June 2021).
- ICGC (Institut Cartogràfic i Geològic de Catalunya). Full 273–135 de l’Ortofoto de Catalunya 1:2500 (OF–25C) (1:2500 Catalonia Orthophoto Tile 273–135). Available online: http://www.icc.cat/vissir3/ (accessed on 21 June 2021).
- ICGC (Institut Cartogràfic i Geològic de Catalunya). Lidar Data. Available online: https://www.icgc.cat/en/Downloads/Elevations/Lidar-data (accessed on 11 July 2021).
- Jenson, S.K.; Domingue, J.O. Extracting Topographic Structure from Digital Elevation Data for Geographic Information System Analysis. ASPRS 1988, 54, 1593–1600. [Google Scholar]
- Boehner, J.; Selige, T. Spatial prediction of soil attributes using terrain analysis and climate regionalisation. In SAGA–Analysis and Modelling Applications; Boehner, J., McCloy, K.R., Strobl, J., Eds.; Goettinger Geographische Abhandlungen: Göttingen, Germany, 2006; pp. 13–28. [Google Scholar]
- Pons, X. MiraMon. Sistema d’Informació Geogràfica i Software de Teledetecció. Versió 8.2d. Centre de Recerca Ecològica i Aplicacions Forestals, CREAF, Bellaterra 84-931323-4-9. 2019. Available online: http://www.creaf.uab.cat/miramon/ (accessed on 21 June 2021).
- Conrad, O.; Bechtel, B.; Bock, M.; Dietrich, H.; Fischer, E.; Gerlitz, L.; Wehberg, J.; Wichmann, V.; Boehner, J. System for Automated Geoscientific Analyses (SAGA) v. 2.1.4. Geosci. Model Dev. 2015, 8, 1991–2007. [Google Scholar] [CrossRef] [Green Version]
- Lee, S.; Wolberg, G.; Shin, S.Y. Scattered Data Interpolation with Multilevel B-Splines. IEEE Trans. Vis. Comput. Graph. 1998, 3, 228–244. [Google Scholar] [CrossRef] [Green Version]
- Williams, R. DEMs of difference. Geomorphol. Technol. 2012, 2, 1–17. [Google Scholar]
- Fiorucci, F.; Ardizzone, F.; Rossi, M.; Torri, D. The use of stereoscopic satellite images to map rills and ephemeral gullies. Remote Sens. 2015, 7, 14151–14178. [Google Scholar] [CrossRef] [Green Version]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Raster Interpolation | Volume (m3) | Area (m2) | Min. Value (m) | Mean Value (m) | Stand. Dev. (m) |
|---|---|---|---|---|---|
| M-Spline Relative Slope Position | −5679.42 | 20,125.88 | −5.44 | −0.23 | 0.38 |
| TIN Relief Inversion | −5343.70 | 15,829.37 | −4.41 | −0.22 | 0.38 |
| M-Spline Relief Inversion | −5194.99 | 16,302.30 | −4.41 | −0.21 | 0.39 |
| TIN Relative Slope Position | −3342.82 | 13,594.35 | −5.71 | −0.13 | 0.29 |
| M-Spline Flow Accumulation Model | −1155.10 | 15,649.33 | −2.05 | −0.05 | 0.08 |
| TIN Flow Accumulatio Model | −541.96 | 7987.75 | −3.19 | −0.02 | 0.06 |
| Reference LIDAR 2010–2017 DoD | −2689.09 | 10,696.00 | −3.87 | −0.11 | 0.27 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Carabassa, V.; Montero, P.; Alcañiz, J.M.; Padró, J.-C. Soil Erosion Monitoring in Quarry Restoration Using Drones. Minerals 2021, 11, 949. https://doi.org/10.3390/min11090949
Carabassa V, Montero P, Alcañiz JM, Padró J-C. Soil Erosion Monitoring in Quarry Restoration Using Drones. Minerals. 2021; 11(9):949. https://doi.org/10.3390/min11090949
Chicago/Turabian StyleCarabassa, Vicenç, Pau Montero, Josep Maria Alcañiz, and Joan-Cristian Padró. 2021. "Soil Erosion Monitoring in Quarry Restoration Using Drones" Minerals 11, no. 9: 949. https://doi.org/10.3390/min11090949
APA StyleCarabassa, V., Montero, P., Alcañiz, J. M., & Padró, J.-C. (2021). Soil Erosion Monitoring in Quarry Restoration Using Drones. Minerals, 11(9), 949. https://doi.org/10.3390/min11090949