
Parameters Tuning Approach for Proportion Integration Differentiation Controller of Magnetorheological Fluids Brake Based on Improved Fruit Fly Optimization Algorithm


Abstract
:1. Introduction
2. Literature Review
2.1. PID Control Methods
2.2. Fruit Fly Optimization Algorithm
2.3. Discussion
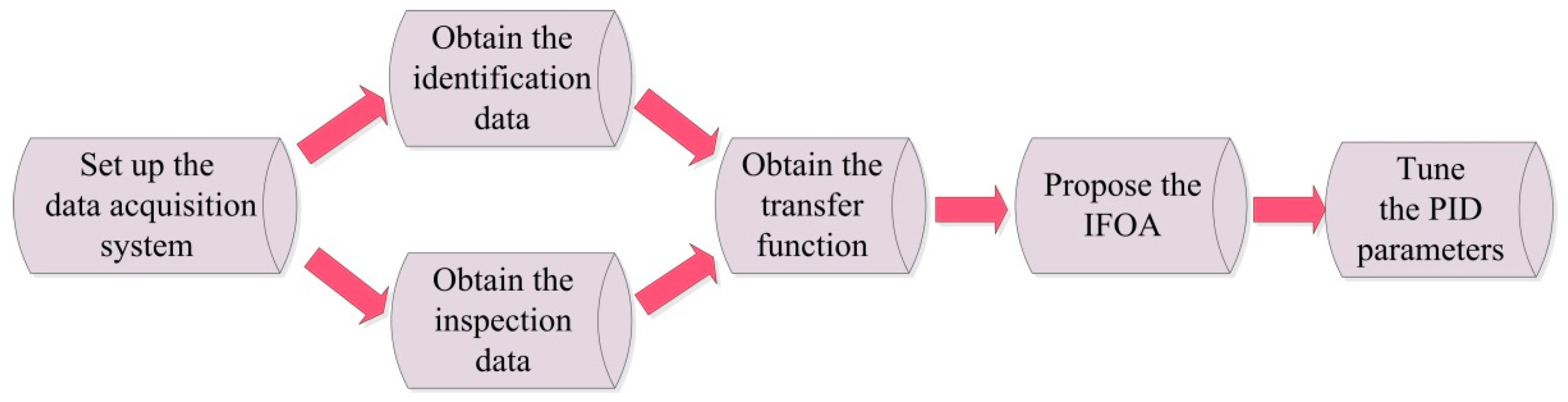
3. The Proposed Method
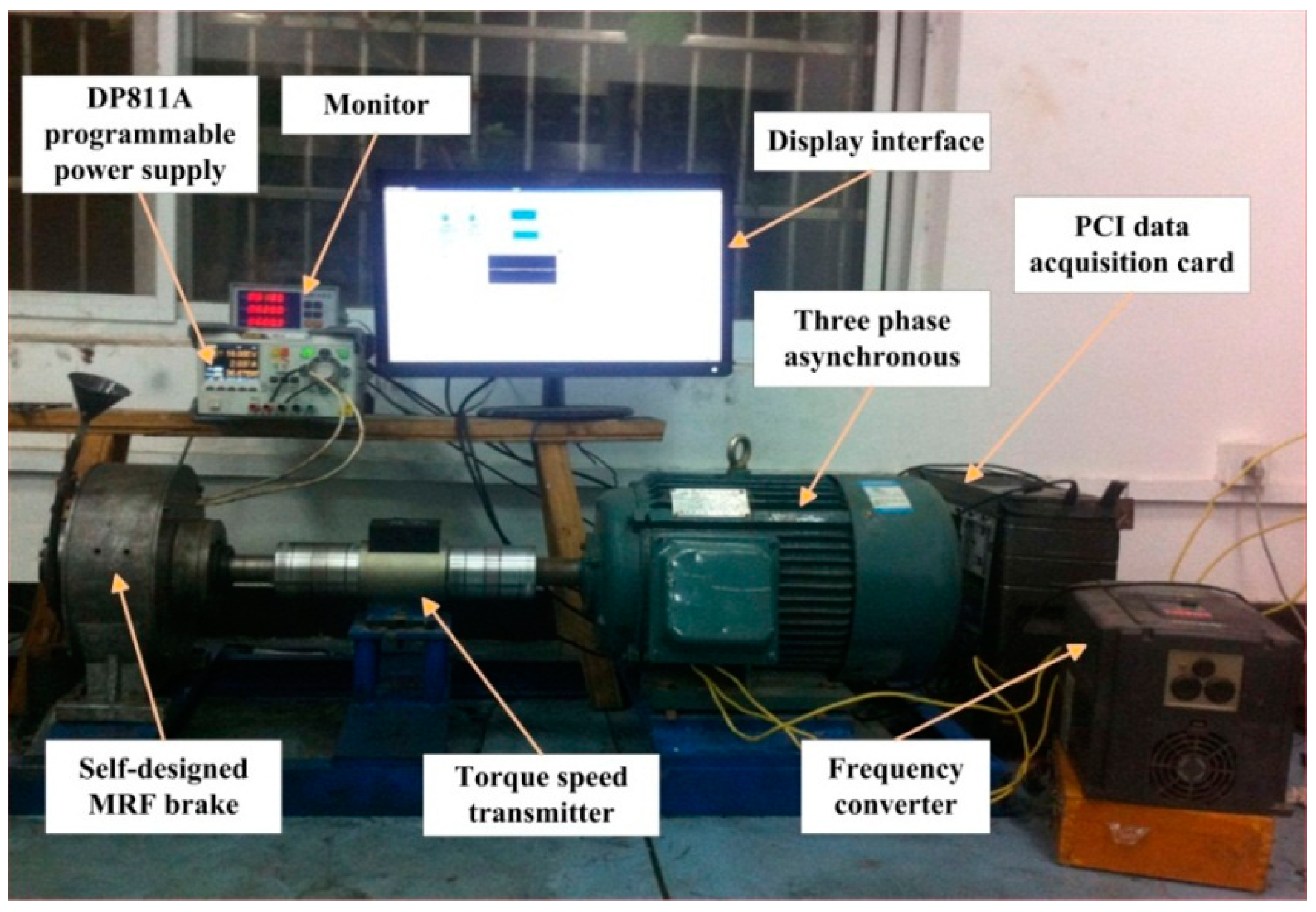
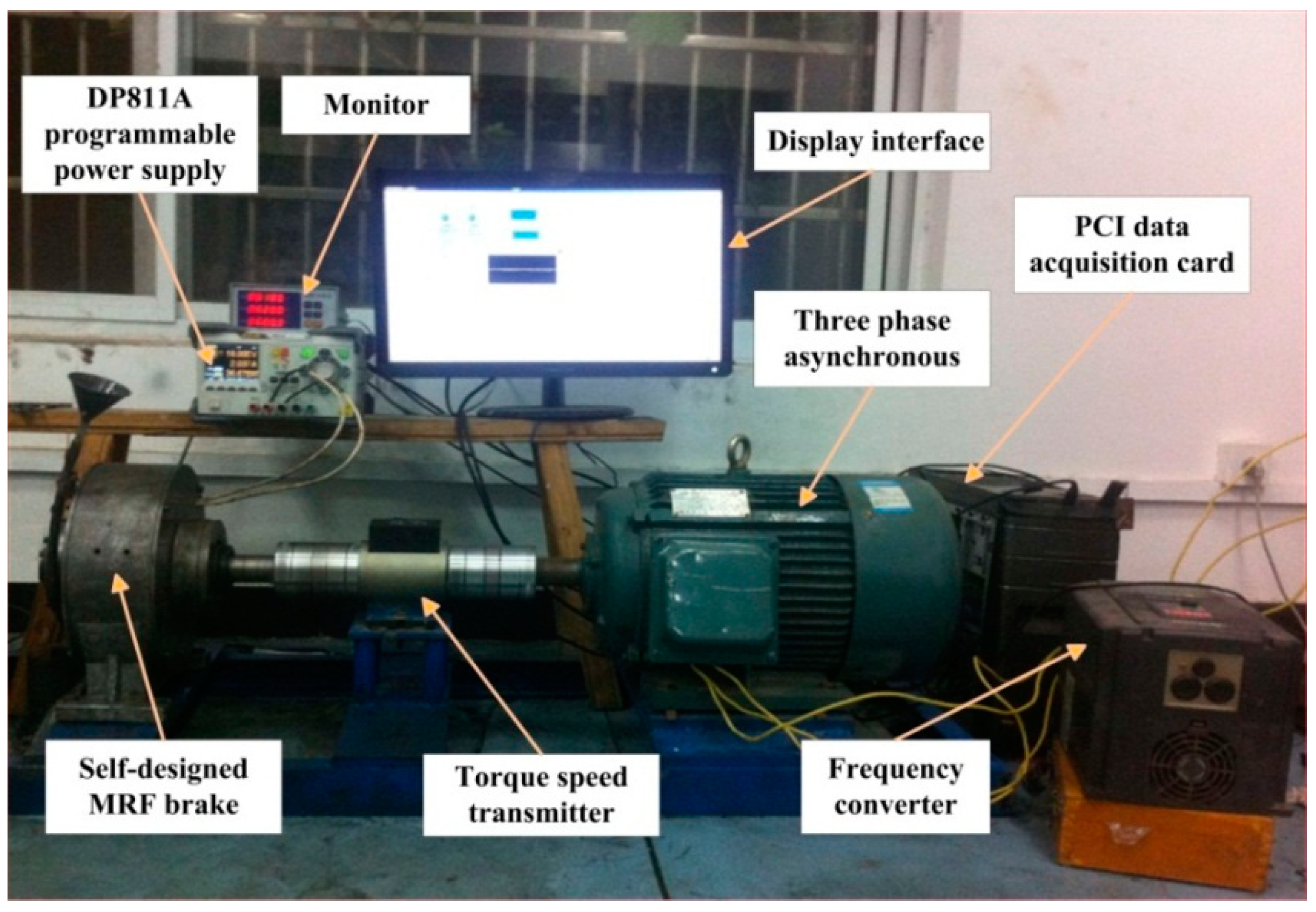
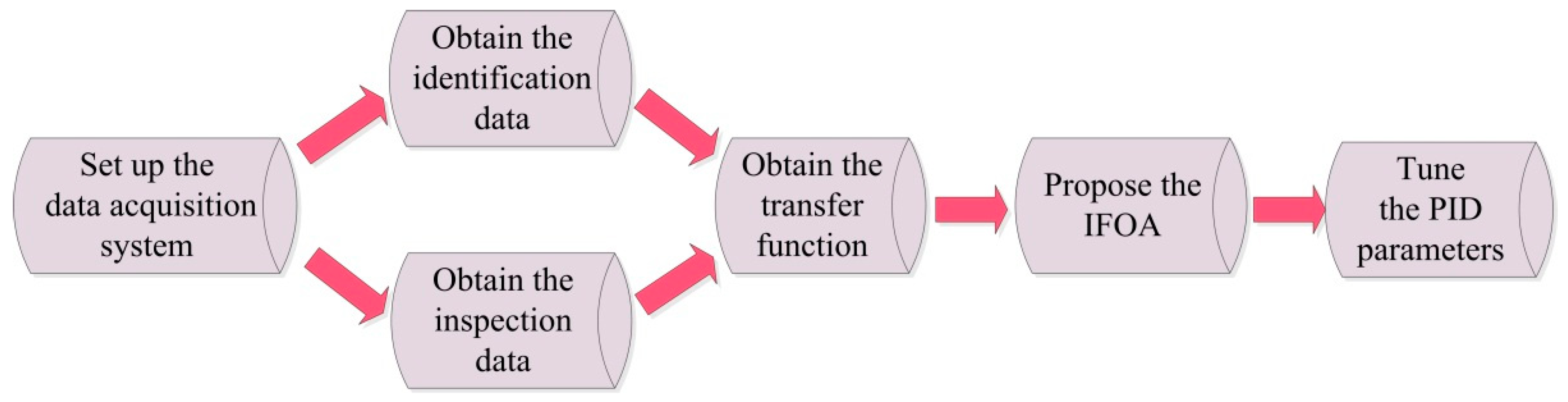
3.1. The Data Acquisition System of MRF Brake
3.2. The Transfer Function of MFR Brake
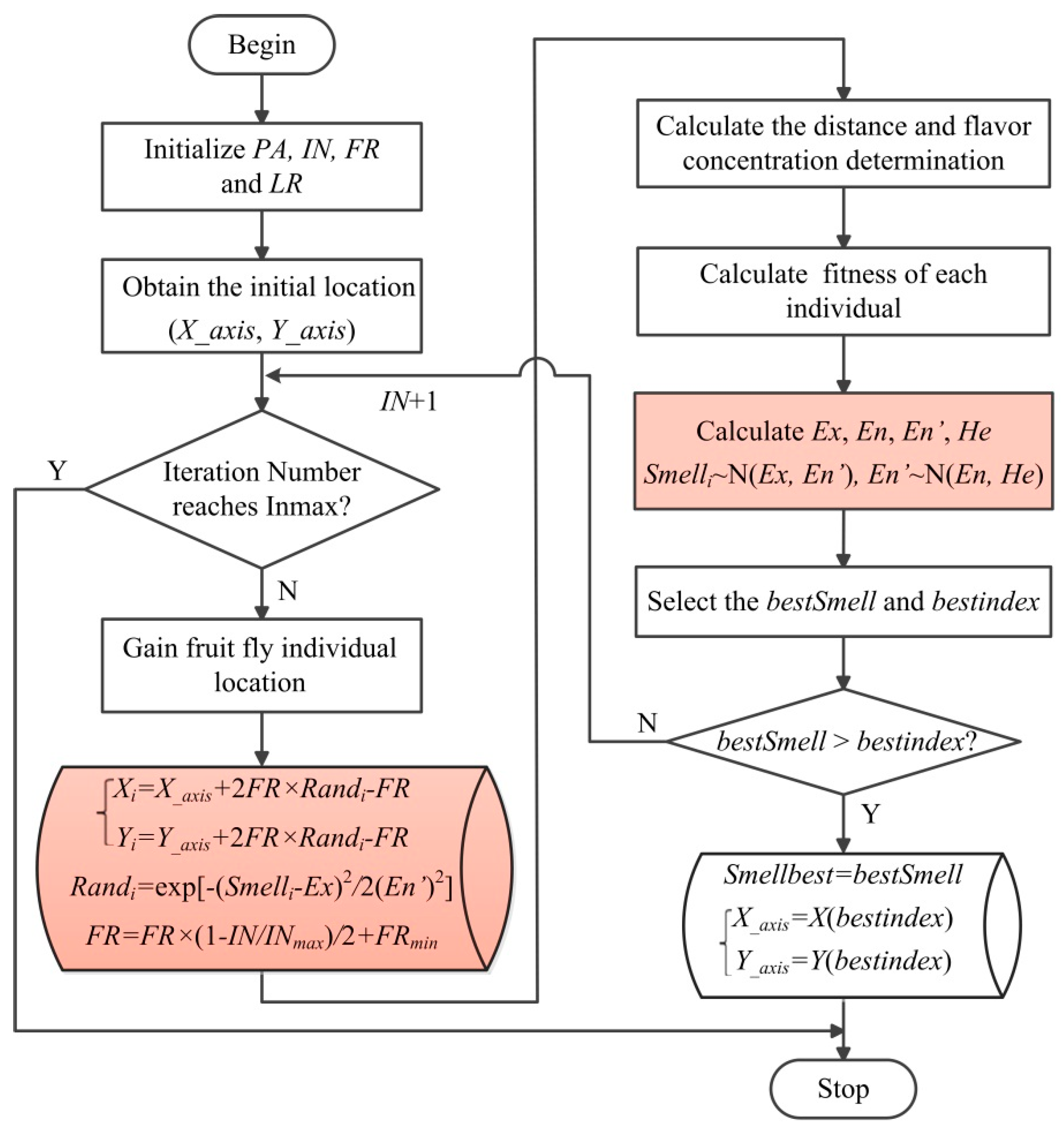
3.3. The Improved Fruit Fly Optimization Algorithm
- Step 1
- Initialize the master parameters of FOA. The population amount (PA), the maximum iteration number (INmax), the random flying distance range (FR), the group location range (LR), and the initial location ( of fruit fly population are determined.
- Step 2
- Calculate the random direction and distance to search for food of the fruit fly individual.
- Step 3
- Calculate the distance between the fruit fly individual and the origin, and then calculate the flavor concentration parameter which is the reciprocal of the distance.
- Step 4
- Substitute into the fitness function, calculate the value of flavor concentration function and find out the best flavor concentration in the fruit fly population. The minimum value is taken as the best flavor concentration in this paper.
- Step 5
- Obtain the best flavor concentration value and the coordinates of , the fruit fly population flies to that location through vision at this point.
- Step 6
- When the smell concentration reaches the preset precision value or the iteration number reaches the maximal IN, the circulation stops. Otherwise, Steps 2 to 4 are repeated.
| Begin Initialize PA, INmax, FR, LR and For (p: = 1; p < PA; p++) { ; ; ; ; ; } [bestSmell bestindex] = min (Smell); ; ; ; For (i: = 1; i< PA; i++) ; ; For (i: = 1; i< PA; i++) ; ; ; For (i: = 1; i < PA; i++) ; while (IN < INmax) { ; Update Xi; Yi; Disti; Si; Smelli; if (bestSmell < Smellbest) { ; ; bestS = S (bestindex,:); Smellbest = bestSmell; } ; ; Update Ex; En; He; Randi; IN = IN+1; } End |
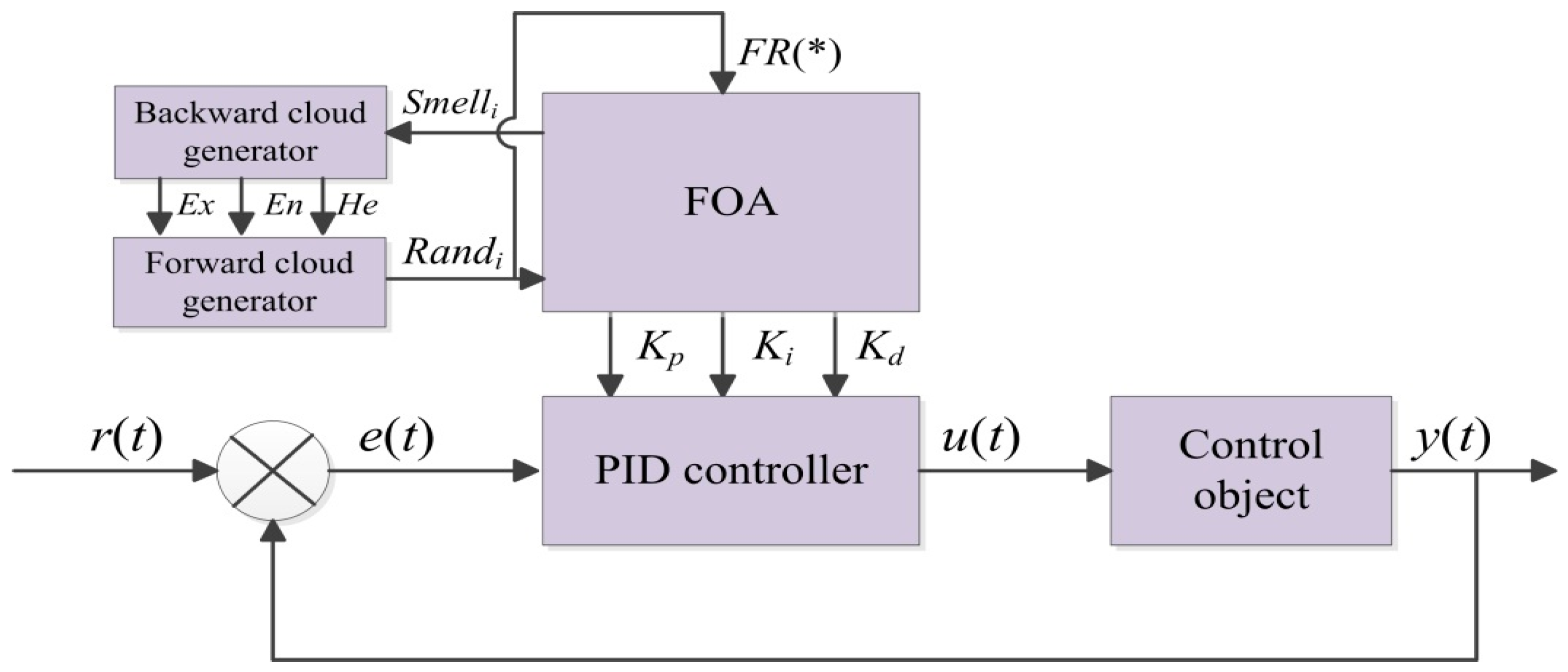
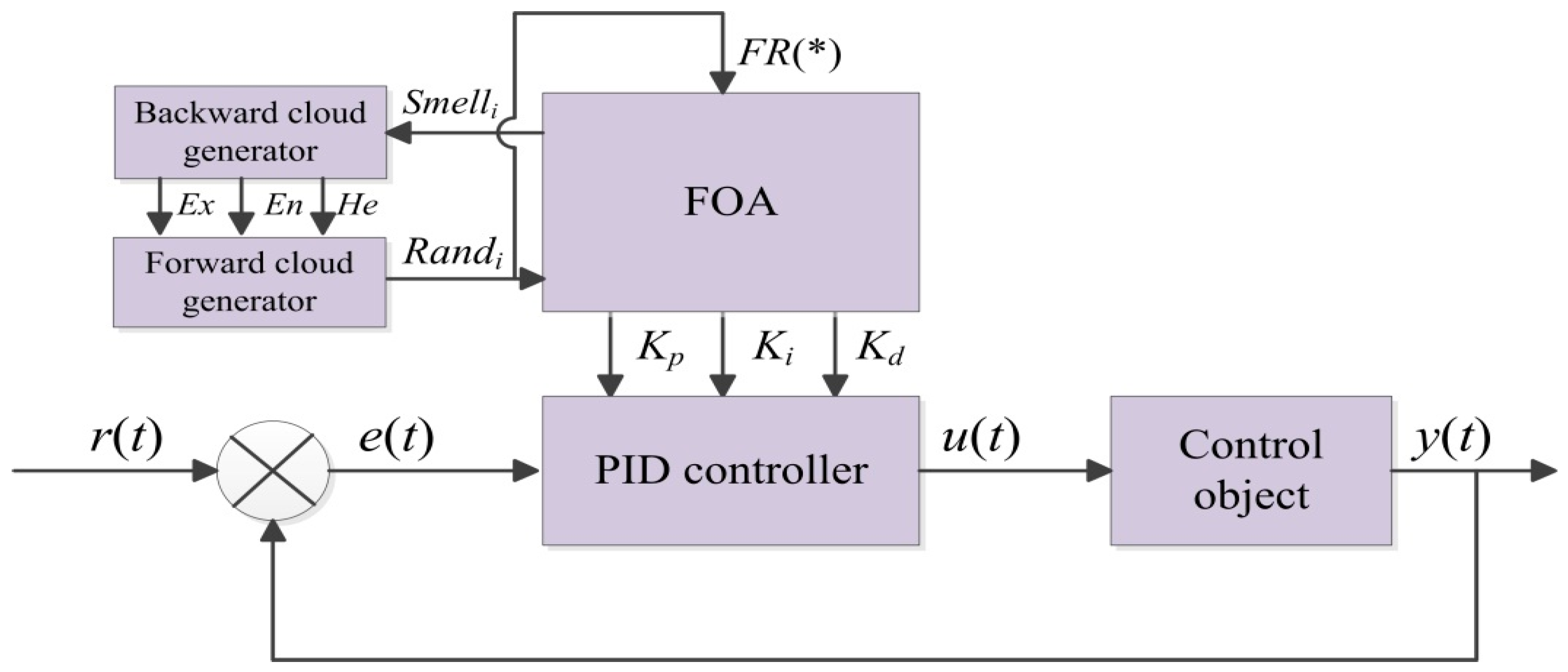
3.4. Tuning the PID Parameters Based on IFOA
4. Simulation and Experimental Results
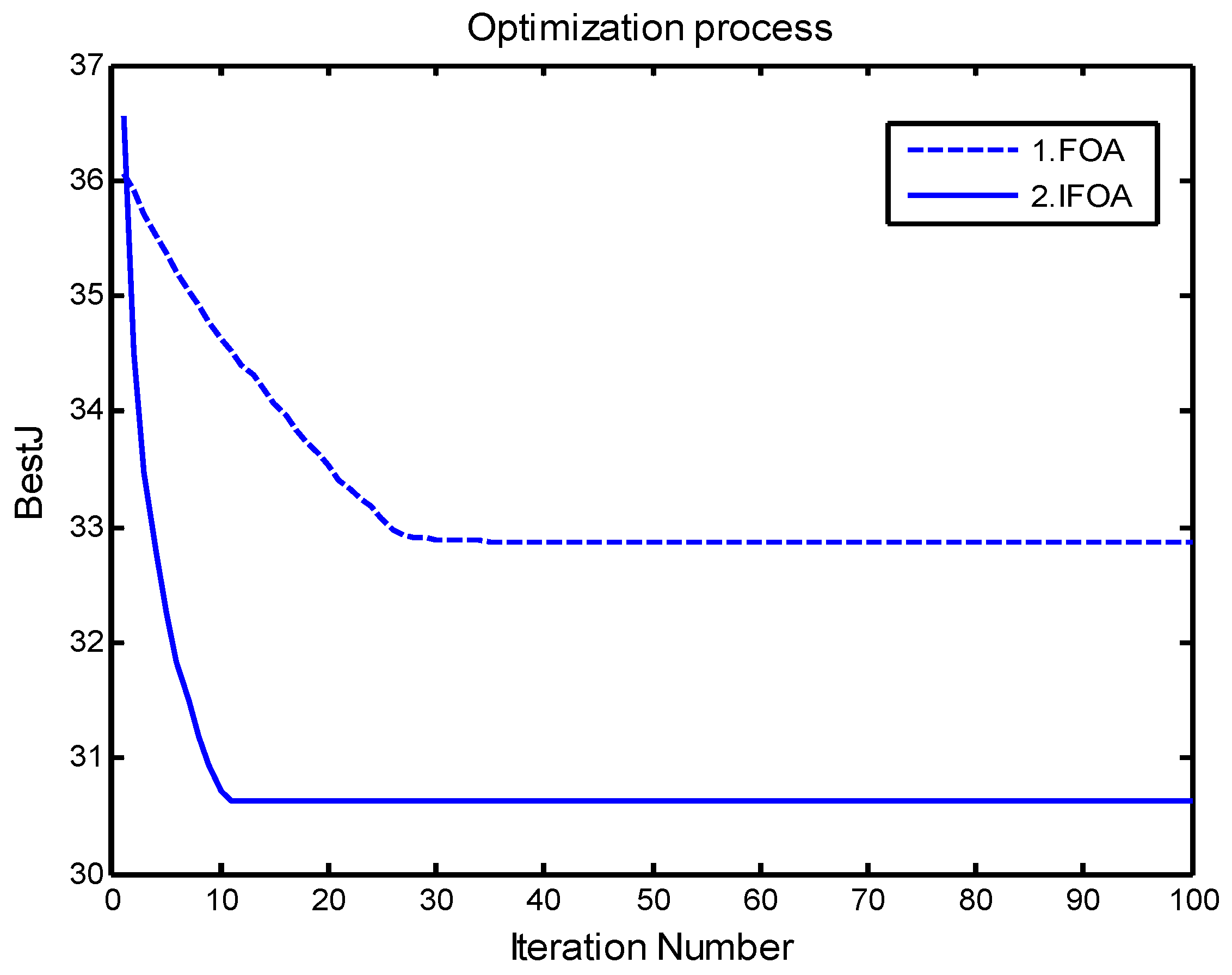
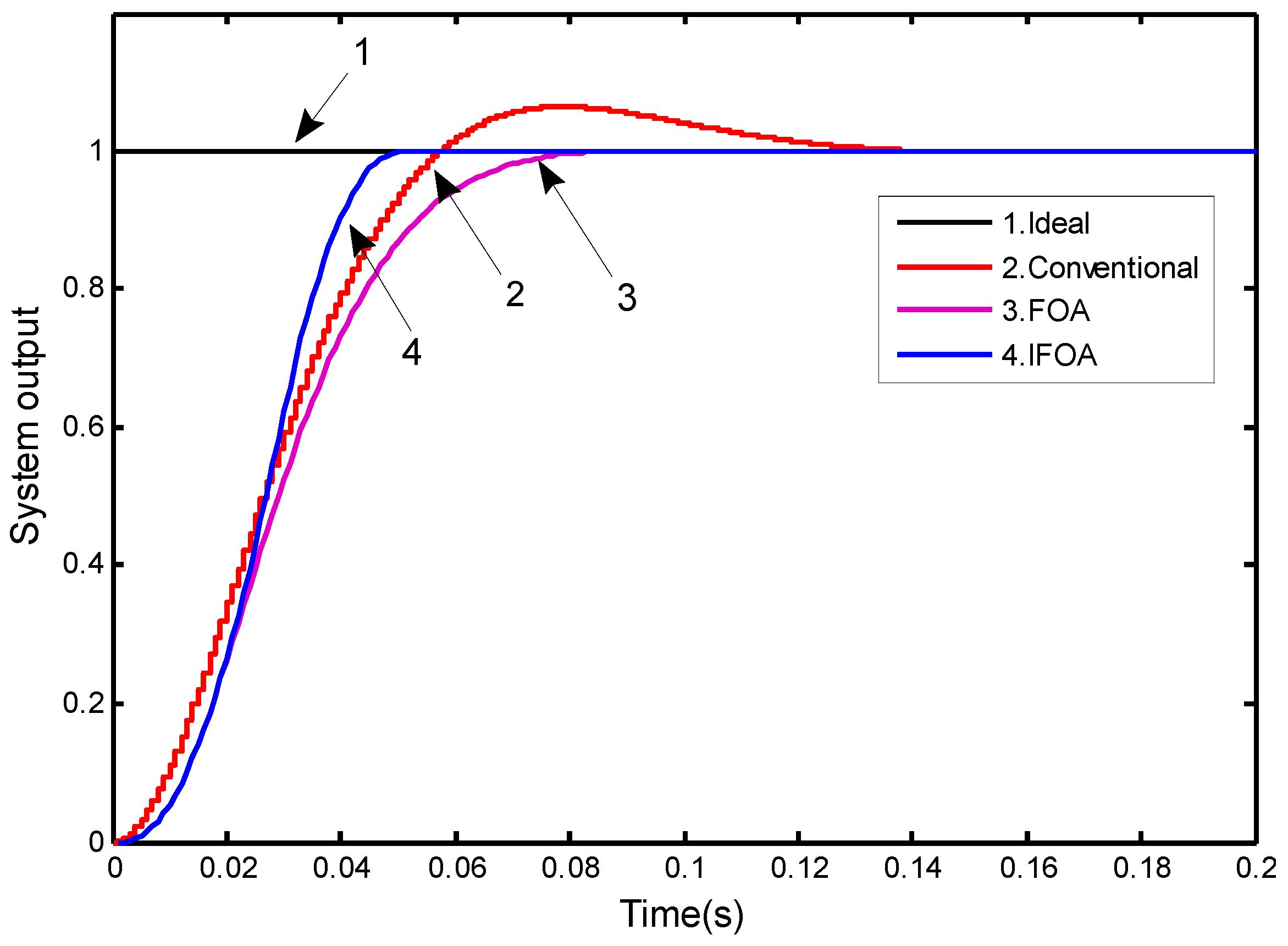
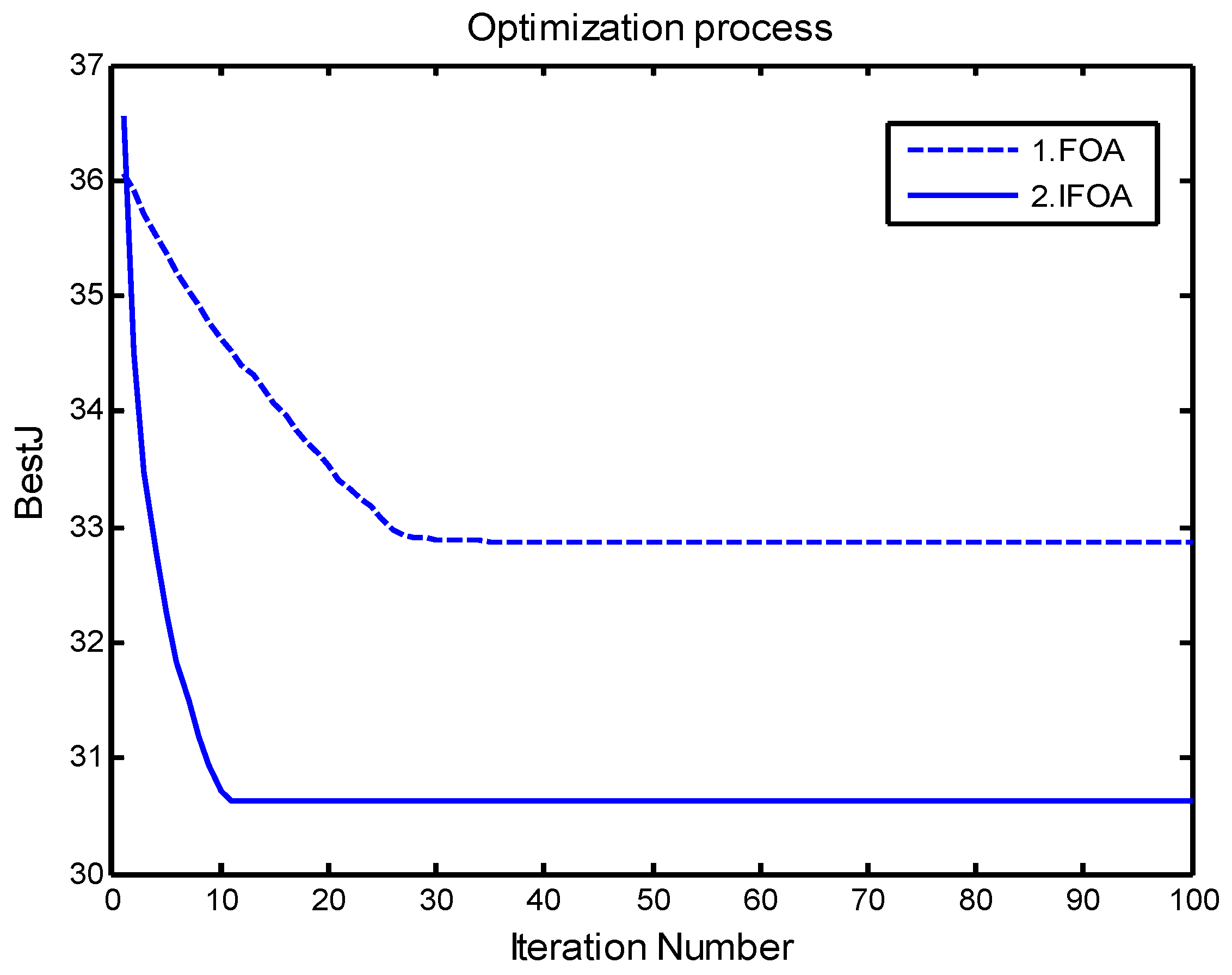
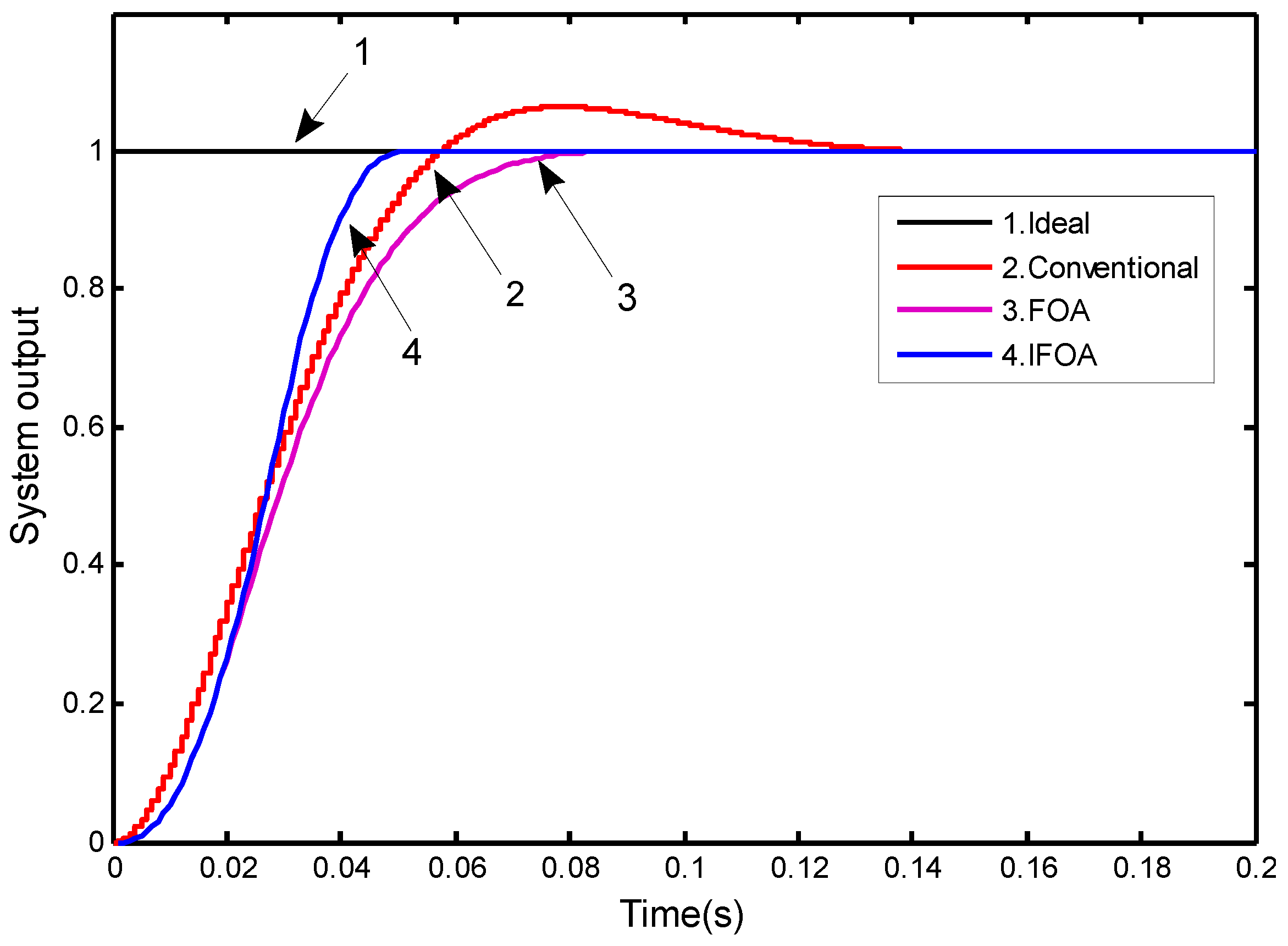
4.1. Simulation Analysis
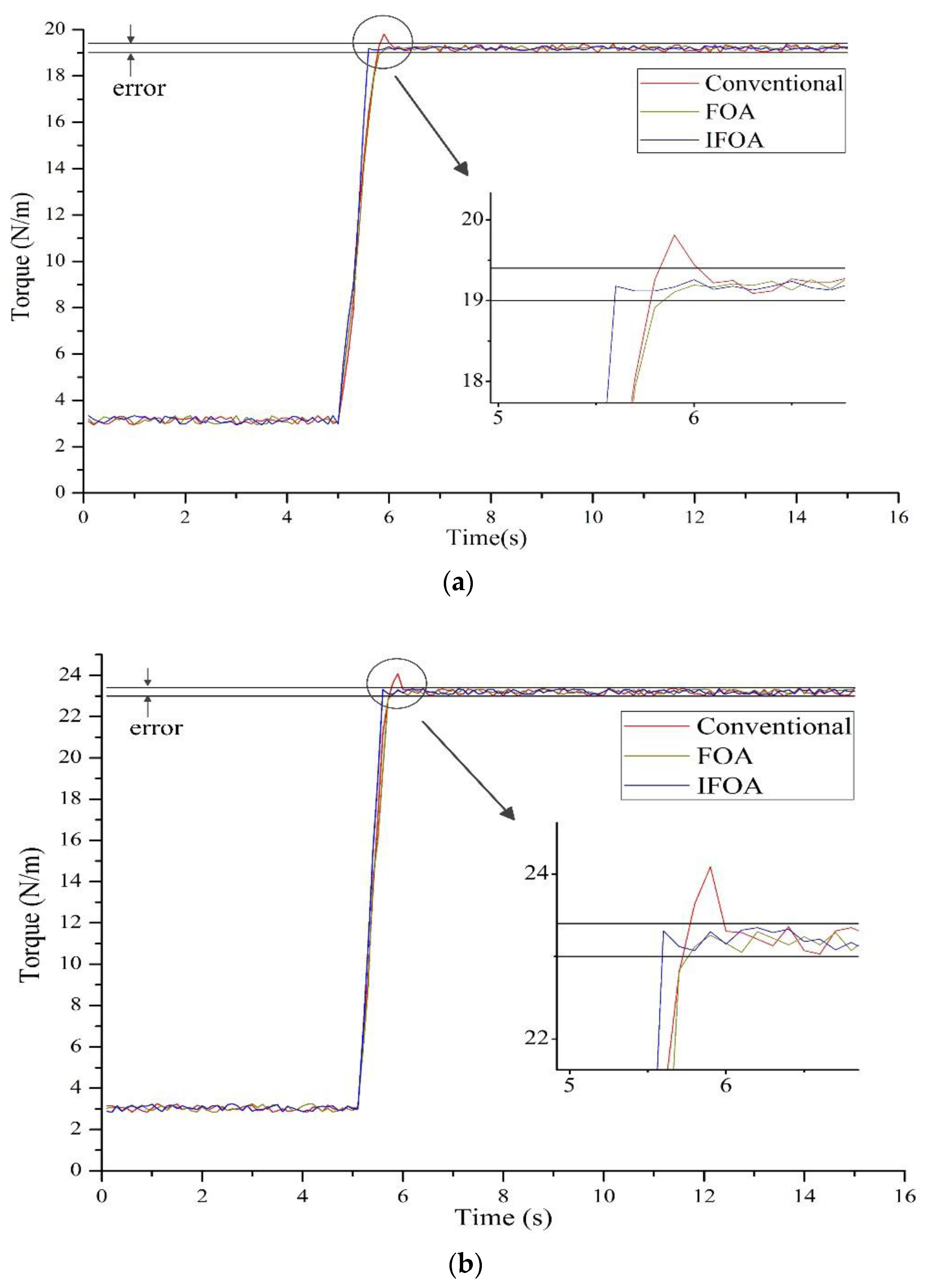
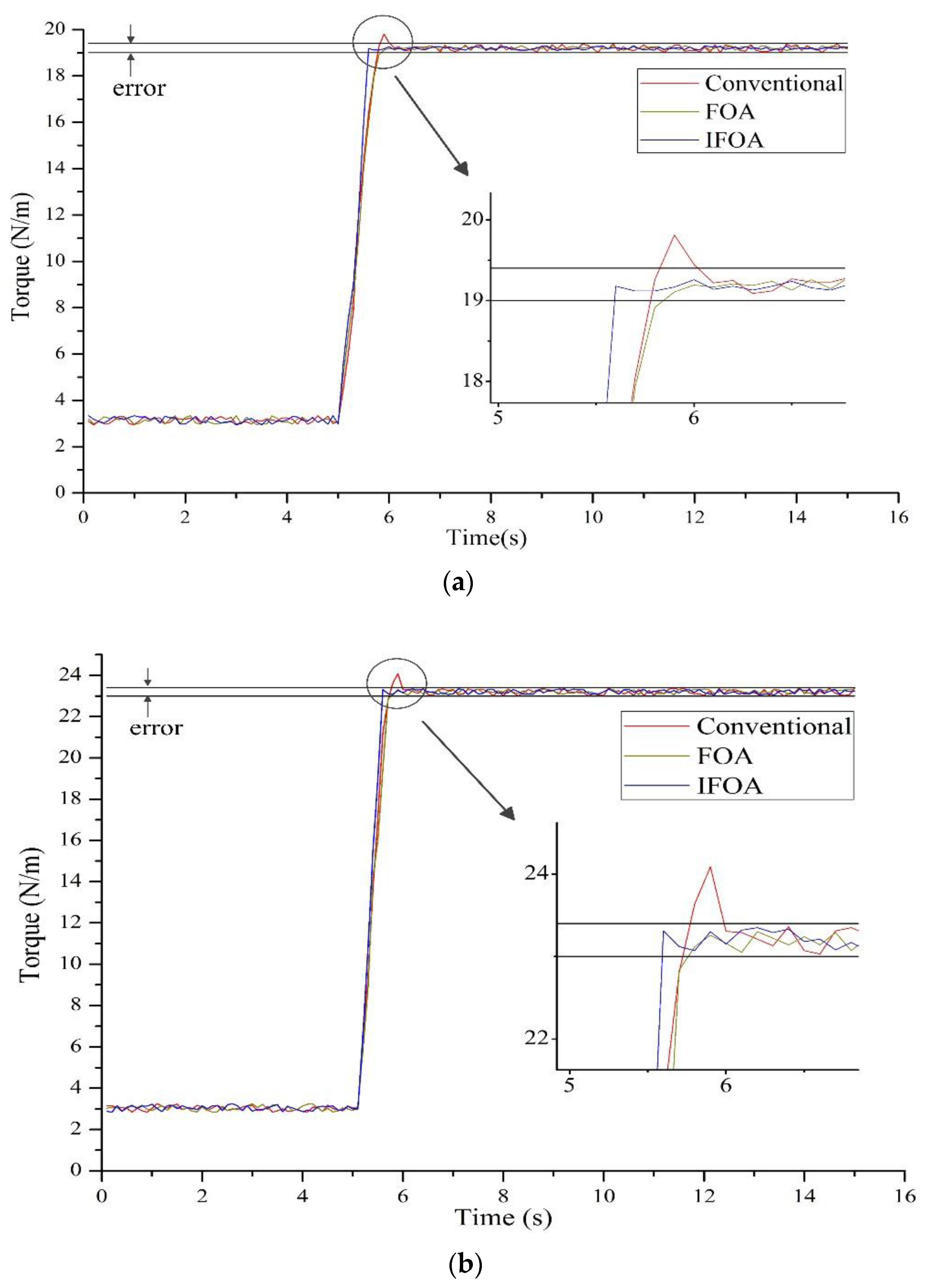
4.2. Experimental Results
5. Conclusions and Future Work
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Carlson, J.D.; Catanzarite, D.M.; St. Clair, K.A. Commercial magnetorheological fluid devices. Int. J. Mod. Phys. B 1996, 10, 2857–2865. [Google Scholar] [CrossRef]
- Duan, Y.F.; Ni, Y.Q.; Ko, J.M. Cable vibration control using magnetorheological dampers. Intell. Mater. Syst. Struct. 2006, 17, 321–325. [Google Scholar] [CrossRef]
- Tusset, A.M.; Balthazar, J.M. On the chaotic cuppression of both ideal and non-ideal duffing based vibrating systems, using a magnetorheological damper. Differ. Equ. Dyn. Syst. 2013, 21, 105–121. [Google Scholar] [CrossRef]
- Liu, X.; Wang, L.; Lu, H.; Wang, D.; Chen, Q.; Wang, Z. Effect of silicone oil viscosity on the properties of magnetorheological fluids. Optoelectron. Adv. Mater. Commun. 2015, 9, 226–230. [Google Scholar]
- Visioli, A. Practical PID Control; Springer Science & Business Media: London, UK, 2006. [Google Scholar]
- Liu, J.K. Advanced PID Control based on MATLAB; Publishing House of Electronics Industry: Beijing, China, 2011. [Google Scholar]
- Ang, K.H.; Chong, G.; Li, Y. PID control system analysis, design, and technology. IEEE Trans. Control Syst. Technol. 2005, 13, 559–576. [Google Scholar]
- Pan, W.T. A new evolutionary computation approach: Fruit fly optimization algorithm. In Proceedings of the Conference on Digital Technology and Innovation Management, Taipei, Taiwan, 2011. [Google Scholar]
- Li, H.Z.; Guo, S.; Li, C.J.; Sun, J.Q. A hybrid annual power load forecasting model based on generalized regression neural network with fruit fly optimization algorithm. Knowl. Syst. 2013, 37, 378–387. [Google Scholar] [CrossRef]
- Lin, S.M. Analysis of service satisfaction in web auction logistics service using a combination of Fruit fly optimization algorithm and general regression neural network. Neural Comput. Appl. 2013, 22, 783–791. [Google Scholar] [CrossRef]
- Wang, W.; Liu, X. Melt index prediction by least squares support vector machines with an adaptive mutation fruit fly optimization algorithm. Chemom. Intell. Lab. Syst. 2014, 141, 79–87. [Google Scholar] [CrossRef]
- Wang, L.; Shi, Y.; Liu, S. An improved fruit fly optimization algorithm and its application to joint replenishment problems. Expert Syst. Appl. 2015, 42, 4310–4323. [Google Scholar] [CrossRef]
- Pan, Q.K.; Sang, H.Y.; Duan, J.H.; Gao, L. An improved fruit fly optimization algorithm for continuous function optimization problems. Knowl. Syst. 2014, 62, 69–83. [Google Scholar] [CrossRef]
- Oliveira, V.A.; Cossi, L.V.; Teixeira, M.C.; Silva, A.M. Synthesis of PID controllers for a class of time delay systems. Automatica 2009, 45, 1778–1782. [Google Scholar] [CrossRef]
- Chen, J.; Huang, T.C. Applying neural networks to on-line updated PID controllers for nonlinear process control. J. Process Control 2004, 14, 211–230. [Google Scholar] [CrossRef]
- Pelusi, D. On designing optimal control systems through genetic and neuro-fuzzy techniques. In Proceedings of the IEEE International Symposium on Signal Processing and Information Technology(ISSPIT), Bilbao, Spain, 14–17 December 2011; pp. 134–139. [Google Scholar]
- Pelusi, D. PID and intelligent controllers for optimal timing performances of industrial actuators. Int. J. Simul. Syst. Sci. Technol. 2012, 13, 65–71. [Google Scholar]
- Pelusi, D. Improving settling and rise times of controllers via intelligent algorithms. In Proceedings of the IEEE International Conference on Computer Modelling and Simulation (Uksim), Cambridge, UK, 28–30 March 2012; pp. 187–192. [Google Scholar]
- Zhu, S.X.; Chen, C.J. Study on variable universe fuzzy PID control for landing gear based on MRF (magneto-rheological fluid) damper. Appl. Mech. Mater. 2012, 233, 66–71. [Google Scholar] [CrossRef]
- Lee, J.H.; Yun, Y.W.; Hong, H.W.; Park, M.K. Tension control of wire rope in winch spooler using magneto rheological brake. Int. J. Precis. Eng. Manuf. 2016, 17, 157–162. [Google Scholar] [CrossRef]
- Abdullah, M.A.; Zainordin, A.Z.; Hudha, K. Performance evaluation of shaft speed control using a magnetorheological brake. Int. J. Automot. Mech. Eng. 2015, 11, 2654–2663. [Google Scholar] [CrossRef]
- Han, J.; Wang, P.; Yang, X. Tuning of PID controller based on fruit fly optimization algorithm. In Proceedings of the IEEE International Conference on Mechatronics and Automation (ICMA), Chengdu, China, 5–8 August 2012; pp. 409–413. [Google Scholar]
- Sheng, W.; Bao, Y. Fruit fly optimization algorithm based fractional order fuzzy-PID controller for electronic throttle. Nonlinear Dyn. 2013, 73, 611–619. [Google Scholar] [CrossRef]
- Li, C.; Xu, S.; Li, W.; Hu, L. A novel modified fly optimization algorithm for designing the self-tuning proportional integral derivative controller. J. Converg. Inf. Technol. 2012, 7, 69–77. [Google Scholar]
- Shan, D.; Cao, G.H.; Dong, H.J. LGMS-FOA: An improved fruit fly optimization algorithm for solving optimization problems. Math. Probl. Eng. 2013, 2013, 1256–1271. [Google Scholar] [CrossRef]
- Pelusi, D.; Tivegna, M. Optimal trading rules at hourly frequency in the foreign exchangemarkets. In Mathematical and Statistical Methods for Actuarial Sciences and Finance; Perna, C., Sibillo, M., Eds.; Springer: Milan, Italy, 2012; pp. 341–348. [Google Scholar]
- Pelusi, D.; Mascella, R.; Tallini, L. Revised gravitationalsearch algorithms based on evolutionary-fuzzy systems. Algorithm 2017, 10, 44. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Radial Dimension | Axial Dimension | Average Maximum Magnetic Field Strength | Maximum Torque |
|---|---|---|---|---|
| MRF brake | 270 mm | 105 mm | 0.52 T | 30.6 N |
| Type | Input Range | Accuracy | AD Transfer Time | Set Frequency |
|---|---|---|---|---|
| PCI8735 | ±5 V | 0.1% | <1.6 μs | 100 Hz |
| Type | Rated Voltage | Rated Current | Transient Response Time | Resolution |
|---|---|---|---|---|
| DP811A | 0–40 V | 0–5 A | <50 μs | 1 mV/0.5 mA |
| Controller Type | σ/% | /s | /s | Ct/s | |||
|---|---|---|---|---|---|---|---|
| Conventional | 16.292 | 5.546 | 0.356 | 6.5% | 0.048 | 0.138 | 10.873 |
| FOA | 22.441 | 0.0813 | 0.539 | 0 | 0.052 | 0.082 | 54.144 |
| IFOA | 86.243 | 0.0820 | 1.134 | 0 | 0.026 | 0.050 | 55.481 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, X.; Shi, Y.; Xu, J. Parameters Tuning Approach for Proportion Integration Differentiation Controller of Magnetorheological Fluids Brake Based on Improved Fruit Fly Optimization Algorithm. Symmetry 2017, 9, 109. https://doi.org/10.3390/sym9070109
Liu X, Shi Y, Xu J. Parameters Tuning Approach for Proportion Integration Differentiation Controller of Magnetorheological Fluids Brake Based on Improved Fruit Fly Optimization Algorithm. Symmetry. 2017; 9(7):109. https://doi.org/10.3390/sym9070109
Chicago/Turabian StyleLiu, Xinhua, Yao Shi, and Jing Xu. 2017. "Parameters Tuning Approach for Proportion Integration Differentiation Controller of Magnetorheological Fluids Brake Based on Improved Fruit Fly Optimization Algorithm" Symmetry 9, no. 7: 109. https://doi.org/10.3390/sym9070109
APA StyleLiu, X., Shi, Y., & Xu, J. (2017). Parameters Tuning Approach for Proportion Integration Differentiation Controller of Magnetorheological Fluids Brake Based on Improved Fruit Fly Optimization Algorithm. Symmetry, 9(7), 109. https://doi.org/10.3390/sym9070109