Defining the Symmetry of the Universal Semi-Regular Autonomous Asynchronous Systems

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Semi-Regular Systems
3. Anti-Semi-Regular Systems
4. Isomorphisms and Anti-Isomorphisms
- (a)
- the diagramis commutative;
- (b)
- (c)
5. Symmetry and Anti-Symmetry
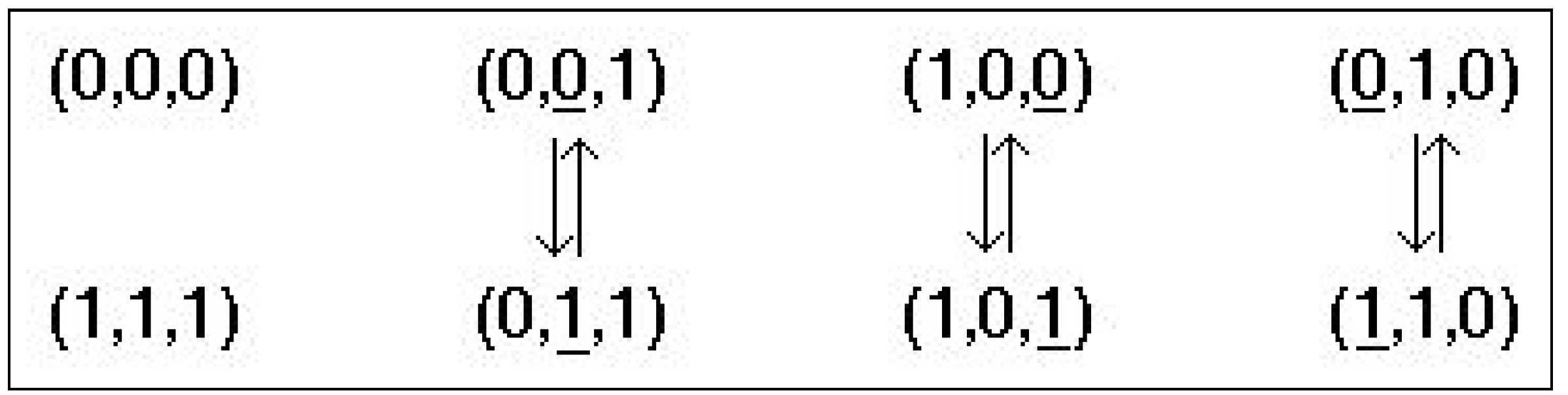
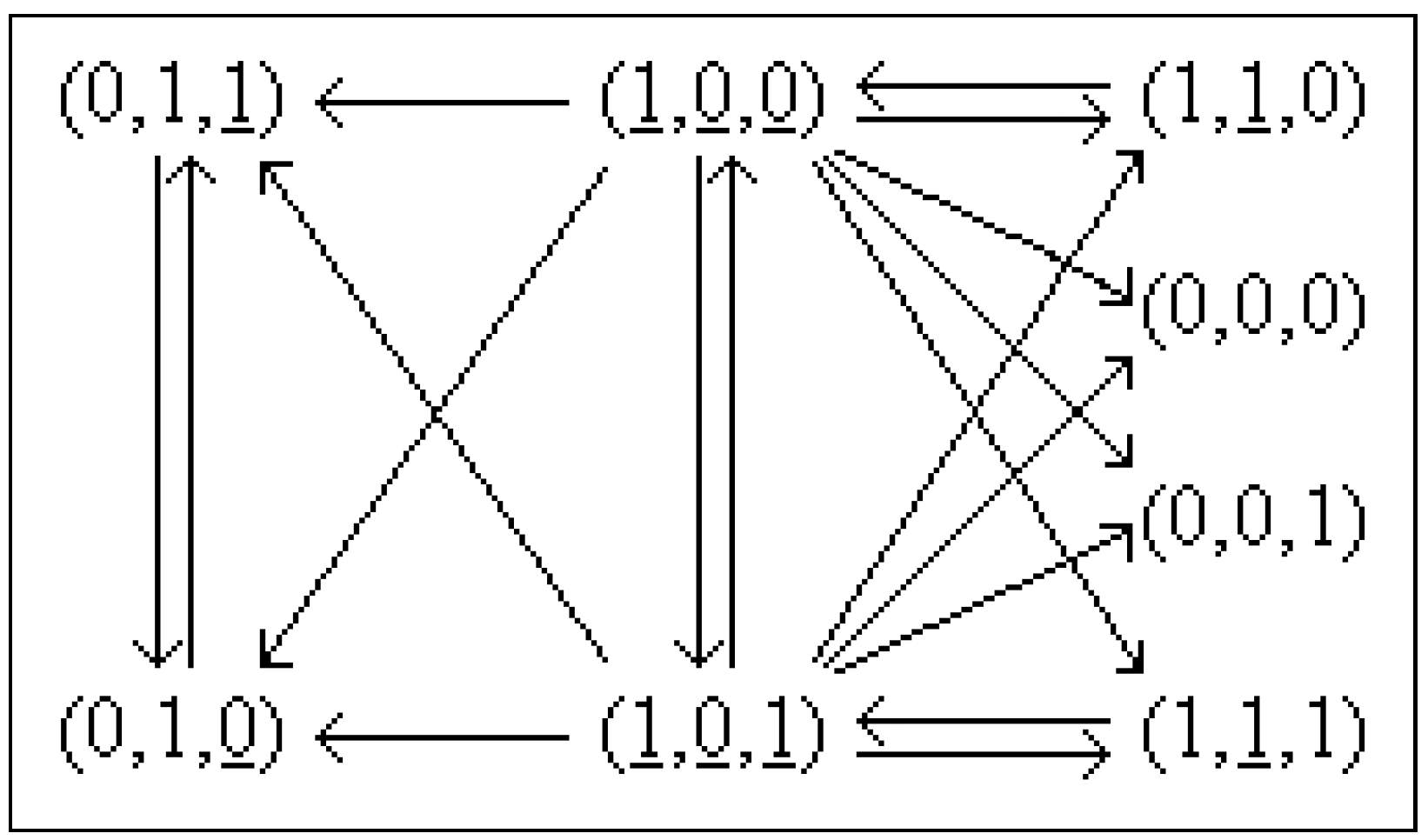
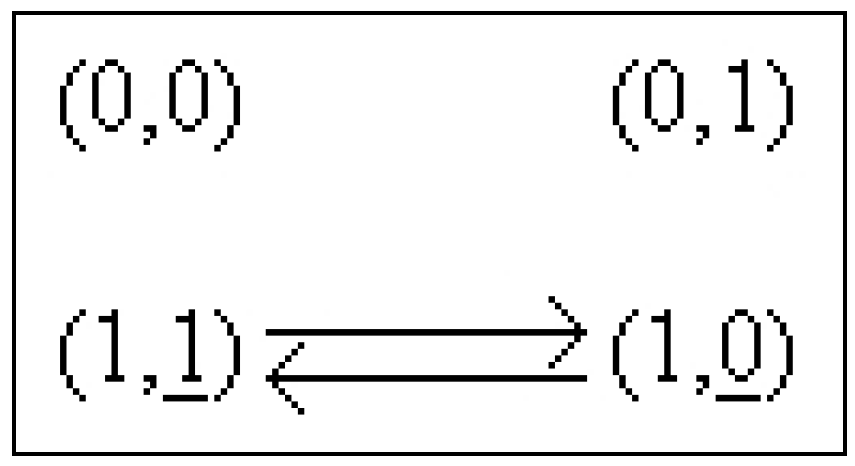
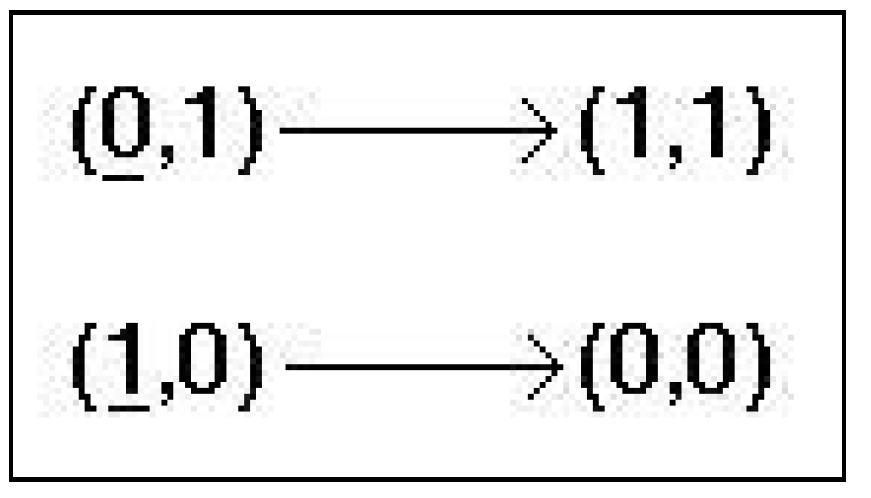
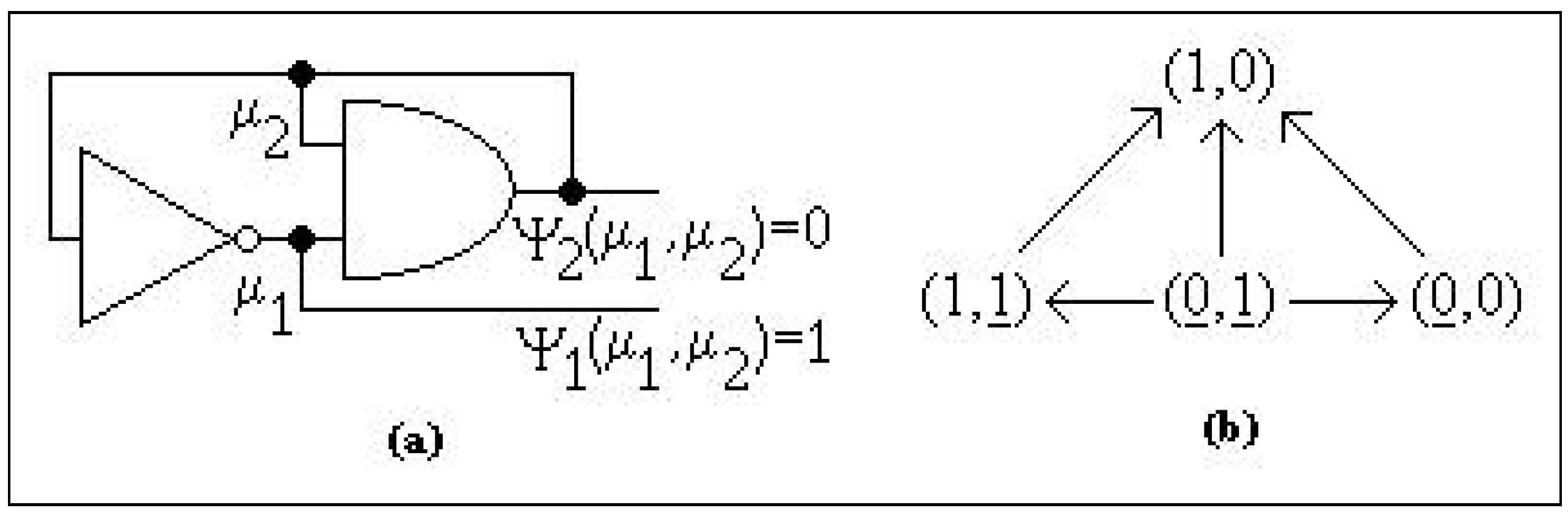
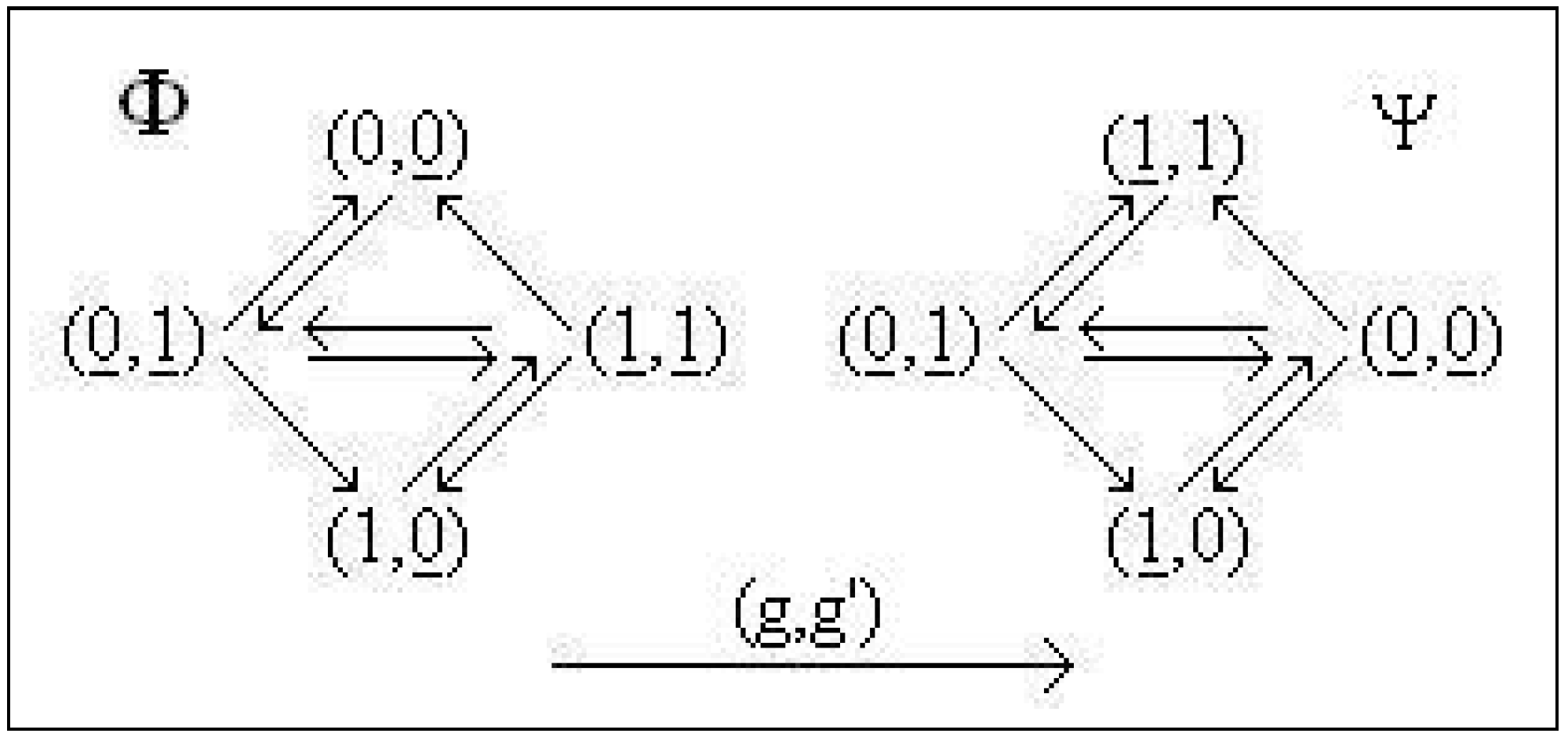
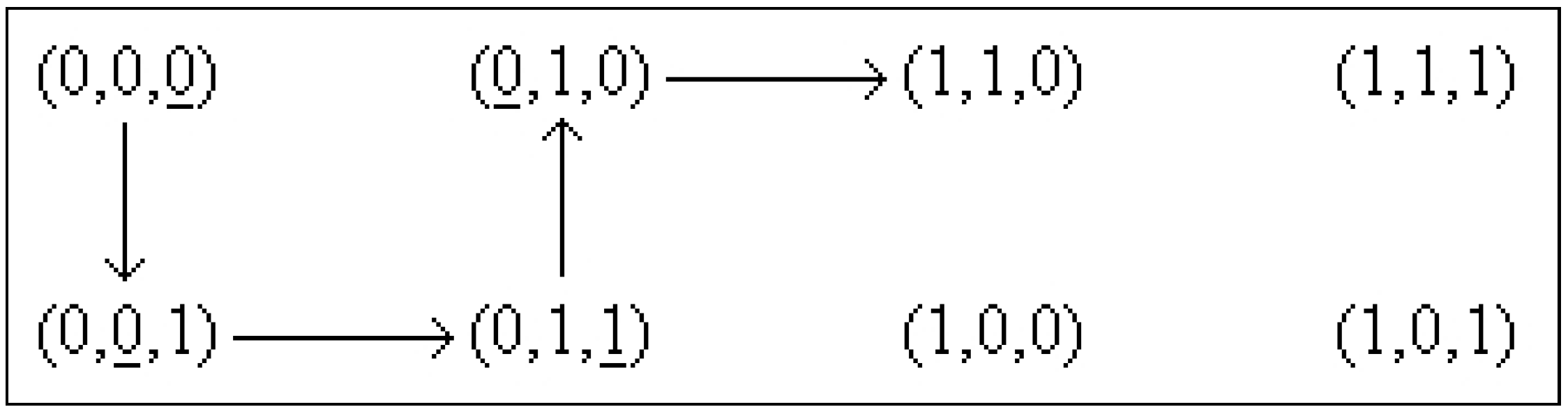
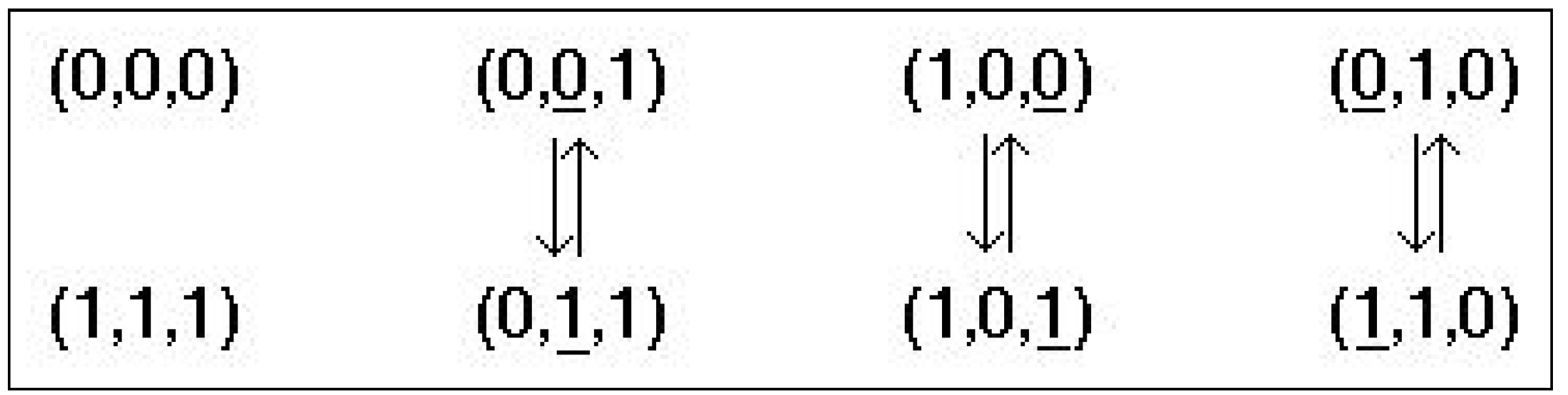
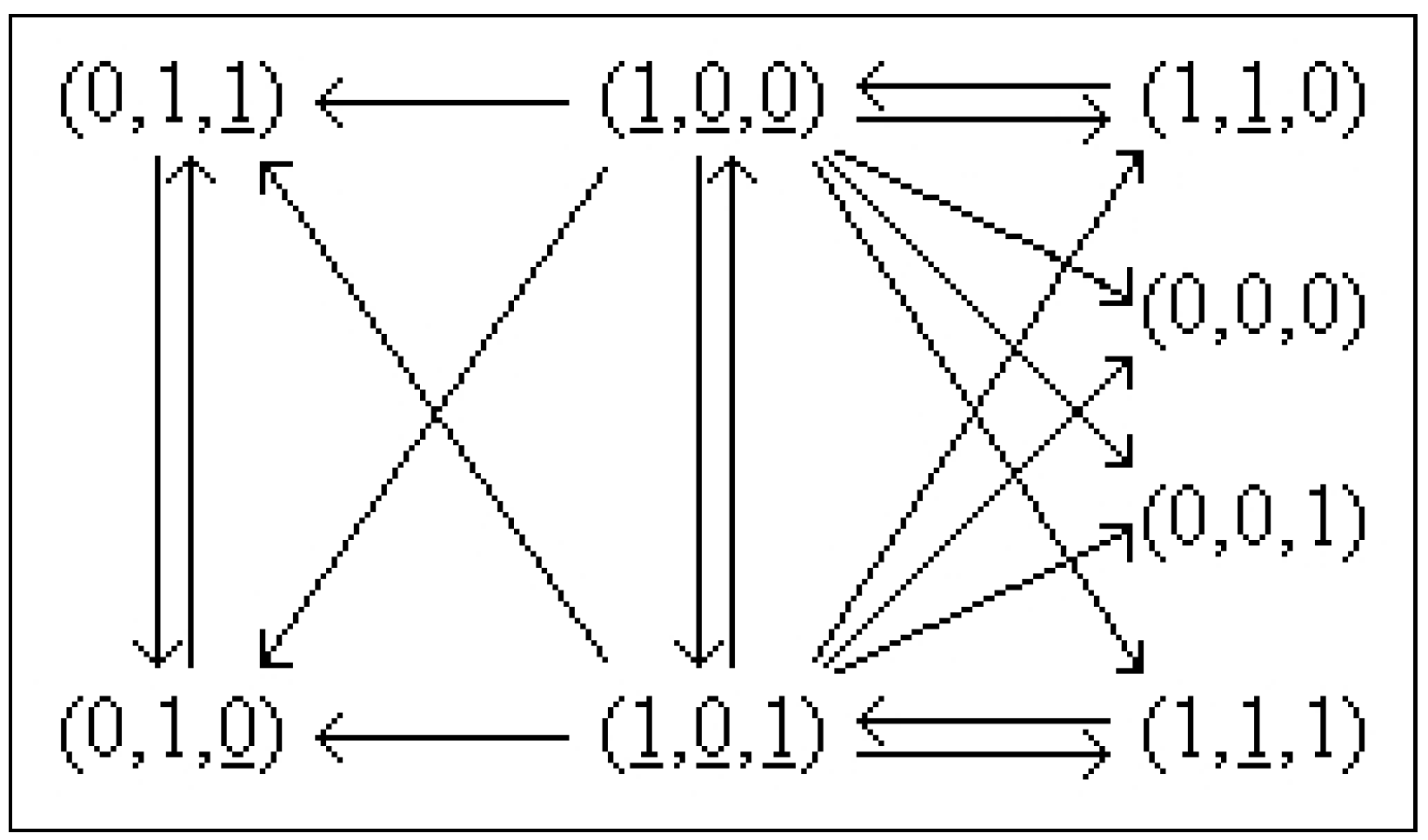
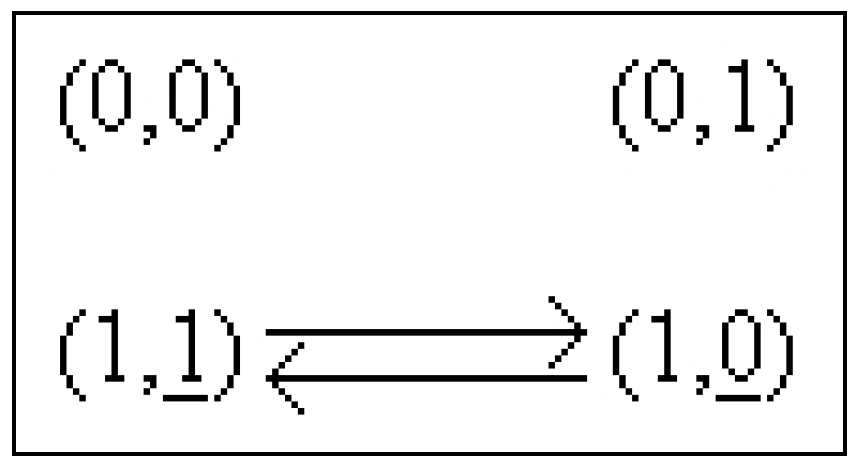
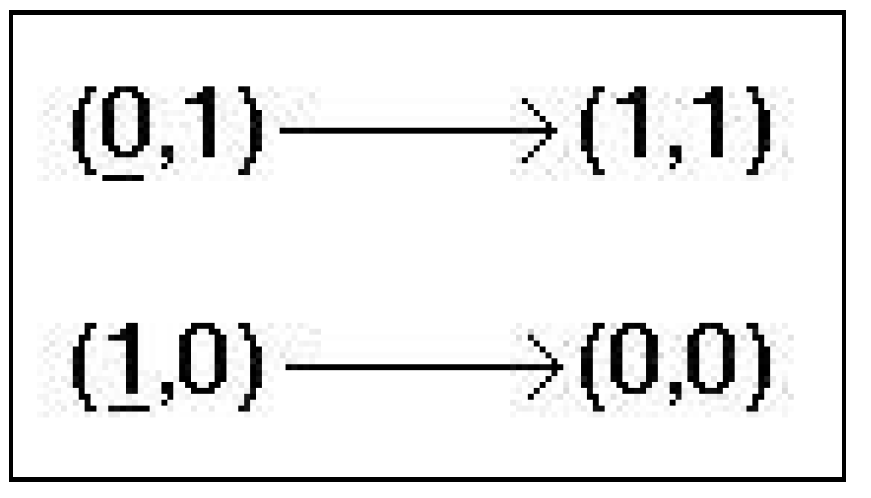
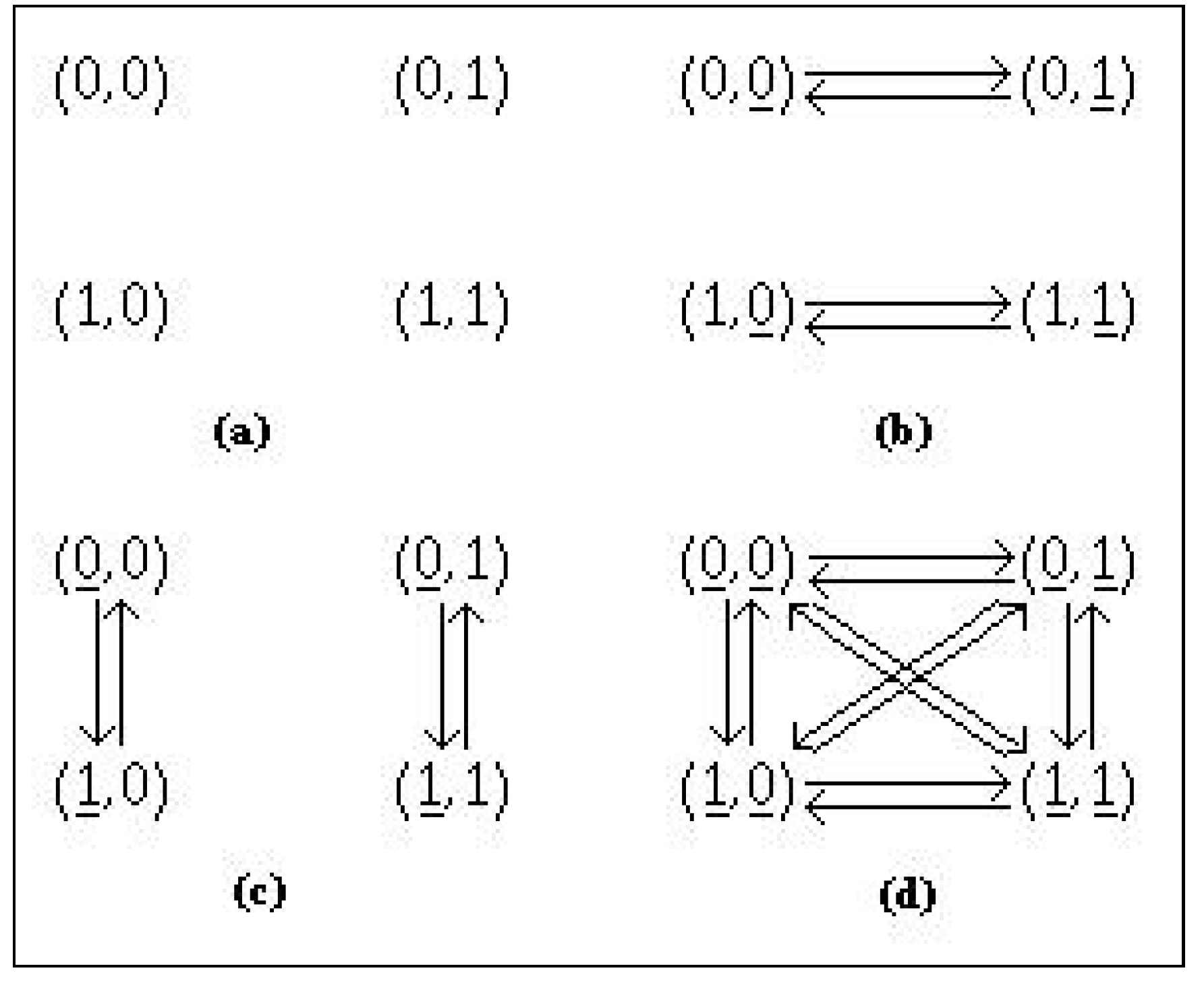
6. Examples
7. Conclusions
References
- Kuznetsov, Y.A. Elements of Applied Bifurcation Theory, 2nd ed.; Springer: Berlin, Germany, 1997. [Google Scholar]
- Vlad, S.E. Boolean dynamical systems. ROMAI J. 2007, 3, 277–324. [Google Scholar]
- Vlad, S.E. Universal regular autonomous asynchronous systems: Fixed points, equivalencies and dynamical bifurcations. ROMAI J. 2009, 5, 131–154. [Google Scholar]

© 2012 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Vlad, S.E. Defining the Symmetry of the Universal Semi-Regular Autonomous Asynchronous Systems. Symmetry 2012, 4, 116-128. https://doi.org/10.3390/sym4010116
Vlad SE. Defining the Symmetry of the Universal Semi-Regular Autonomous Asynchronous Systems. Symmetry. 2012; 4(1):116-128. https://doi.org/10.3390/sym4010116
Chicago/Turabian StyleVlad, Serban E. 2012. "Defining the Symmetry of the Universal Semi-Regular Autonomous Asynchronous Systems" Symmetry 4, no. 1: 116-128. https://doi.org/10.3390/sym4010116
APA StyleVlad, S. E. (2012). Defining the Symmetry of the Universal Semi-Regular Autonomous Asynchronous Systems. Symmetry, 4(1), 116-128. https://doi.org/10.3390/sym4010116