1. Introduction
In the power system, with the continuous integration of high-proportion new energy units [
1,
2,
3], the overall rotational inertia of the grid shows a downward trend [
4,
5,
6], and transient frequency security has become a key challenge restricting the development of the new power network. The factors causing low-frequency oscillation are rather complex. They not only include permanent power disturbances caused by faults such as the disconnection of new energy units, but also short-term power surges brought about by large-scale low-voltage ride-through of new energy units due to short-circuit faults, which can also lead to rapid changes in system frequency. Moreover, if faults occur in the 500-kilovolt transmission channels between regional grids, they may also cause low-frequency oscillation problems throughout the entire network. Fault ride-through refers to the situation where, in the event of a fault in the power system, the wind turbine can remain connected to the grid without being disconnected, and can quickly return to its normal operating state after the fault is cleared. Low-voltage ride-through is a special case of fault ride-through in power systems, which can maintain grid-connected operation without disconnection within a certain period of time and a certain degree of low-voltage range.
Nowadays, regional grids are closely connected. Multiple wind turbine units form a wind power cluster and transmit electricity outward through high-voltage interconnection lines. After a short-circuit grounding fault occurs in a 500-kilovolt power channel, if the number of wind turbines entering the low-voltage ride-through state increases under fault conditions, the transient voltage drop of most wind turbines in large-scale new energy bases may trigger low-voltage ride-through protection, instantly generating a significant active power deficiency. According to China’s power grid connection rules, the active power recovery rate of wind turbines after fault clearance should not be lower than 0.1 p.u./s. Before the wind turbine output recovers, regional grids with a high proportion of new energy are at risk of low-frequency oscillation. With the continuous large-scale integration of new energy [
7,
8,
9,
10], when the number of wind turbines entering the low-voltage ride-through state increases under fault conditions, the system frequency will further decrease, posing a risk of triggering low-frequency load shedding. Low-frequency oscillation can lead to the collapse of the power grid, cause tripping of connecting lines, and increase the risk of system power outages. Traditional methods generally involve strengthening the construction of backup channels between regional grids or enhancing the identification and verification of the low-voltage ride-through characteristics of wind power, and taking measures to limit the output of wind power clusters.
Pumped storage power stations have multiple functions such as peak shaving and valley filling, frequency and phase regulation, and emergency backup [
11,
12,
13,
14], and are currently the most mature and economically optimal large-scale energy storage methods. They play a significant role in the power system, effectively solving the peak shaving problem of the grid and ensuring its safe, stable, and economic operation. The fast response speed and bidirectional power adjustment capabilities of pumped storage power stations [
15,
16,
17,
18] make them irreplaceable in assisting the integration of centralized/distributed new energy and grid operation. Compared with traditional discrete and unidirectional control resources such as generator tripping and load shedding, they are very suitable for emergency control after short-term power disturbances [
19,
20]. The issue of power system frequency regulation has received extensive attention, and many studies have focused on the key role of energy storage systems in this regard. Some scholars have proposed an integrated strategy aimed at stabilizing the grid frequency through primary frequency regulation using hybrid energy storage systems, providing a new approach to addressing frequency fluctuations [
21]. Some research has explored the coordinated control of traditional units, wind energy, and battery energy storage systems to enhance the effective support for frequency regulation services, and evaluated the effectiveness of energy storage resources in frequency regulation in single-area power systems. Their studies provide a reference for measuring the actual contribution of energy storage systems in frequency regulation and offer important theoretical and technical support for addressing the challenges of power system frequency fluctuations and ensuring grid stability [
22,
23,
24,
25].
In recent years, variable-speed pumped storage units have received extensive attention due to their significant role in power system frequency regulation and stable power supply. Many studies have focused on optimizing the control strategies and performance evaluation of variable-speed pumped storage units to enhance their effectiveness in suppressing power oscillations in regional power systems.
Regarding the control strategies of variable-speed pumped storage units, Reference [
26] proposed a speed pullback control and adaptive strategy to optimize the operational performance of variable-speed pumped storage units. Reference [
27] studied the power regulation characteristics of variable-speed pumped storage units in pumping mode, providing a theoretical basis for improving their regulation capabilities through quantitative analysis. Reference [
28] conducted stability analysis and singular perturbation model reduction for variable-speed pumped storage units (VSPS) adopting rapid speed control strategies, providing a new approach for the small-signal oscillation stability analysis of the system. Additionally, some studies have focused on the performance of VSPS under different operating modes. Reference [
29] proposed an improved start-up strategy for large-rated VSPS operating in pumping mode. Reference [
30] analyzed the hydraulic disturbance characteristics and power control of fixed-speed and variable-speed pumped storage units in generating mode, offering new ideas for optimizing their operational performance. Reference [
31] proposed a multi-time-scale model reduction strategy, providing an effective means for the oscillation stability analysis of VSPS grid-connected systems. In terms of the modeling and performance evaluation of VSPS, Reference [
32] established a dynamic model of VSPS and proposed favorable speed instructions to enhance its performance during the power regulation process. Reference [
33] explored the flexibility of VSPS in the primary frequency regulation of power grids and its assessment methods, providing a reference for optimizing its frequency regulation capability. Reference [
34] investigated the impact of excitation control on the electromechanical transient modeling of VSPS, offering theoretical support for improving its transient stability. Reference [
35] considered the integration of VSPS with AC power grids and new energy utilization, proposing an optimized operation strategy to enhance its overall operational efficiency. Currently, some of the literature has studied the inherent power characteristics of VSPS, but there is limited research on the simultaneous reactive and active power support and power oscillation suppression provided by VSPS when connected to regional power grids.
With the continuous large-scale connection of wind turbine units in high-proportion new energy regions, when the number of wind turbines entering the low-penetration state increases due to faults, the system frequency will further decrease, posing a risk of triggering low-frequency load shedding actions. This paper intends to construct a system frequency response analysis model and response depth considering VSPS for emergency power control under the short-term power impact of wind power clusters based on the actual power network of a certain region in Northeast China, and analyze the impact of the released power and duration of energy storage on the system frequency characteristics under short-term power disturbances. The study focuses on the rapid dual support capability of variable-speed pumped storage units in high-proportion new energy power systems under single asymmetric short-circuit faults. By using the excitation control of variable-speed pumped storage units to provide inertia support and fault ride-through energy, it ensures the active power balance during the low-voltage ride-through period and prioritizes the provision of dynamic reactive power to the grid to support voltage recovery. This compensates for the deficiencies of wind turbine units in fault ride-through and active frequency regulation. Based on the voltage at the wind power cluster connection point, a reactive power priority control for variable-speed pumped storage units is established to prioritize the stability of the voltage at the wind power cluster connection point and simultaneously provide rapid power support to the system to avoid power oscillations. The main contributions and innovations of this paper are listed as follows:
This paper studies the rapid dual support capability of variable-speed pumped storage units (VSPS) for the power system under single short-circuit faults in a high proportion of new energy power systems, and proposes a VSPS power dual-channel energy control model to make up for the deficiencies of wind turbine units in fault ride-through and low-frequency oscillation suppression. Existing research has not yet covered the analysis of the power of dual support capability and strategies of VSPS.
This paper studies the large and rapid active and reactive power control strategy of VSPS under the premise of reactive power priority, and proposes an additional energy branch of VSPS to suppress power oscillations in regional power grids. Based on the analysis of a certain new energy base in Northeast China, the control strategy proposed in this paper restores the asymmetric power system after the fault to a symmetrical and stable power system. Existing research has not yet covered the study of VSPS in suppressing system power oscillations. This paper is organized as follows.
The second part analyzes the establishment of the system response model under the influence of transmission channel faults; the third part analyzes the bidirectional regulation capacity and depth of the active and reactive power of variable-speed pumped storage units, and also analyzes the phase regulation capability of variable-speed pumped storage units; the fourth part considers the large and rapid active and reactive power control strategy of variable-speed pumped storage units with reactive power regulation, and based on the above control strategy, constructs the additional damping control of VSPS to suppress the power oscillation of regional power grids; the fifth part tests the method proposed in this paper based on a certain area’s system with a high proportion of wind power and concentrated thermal power; and finally, the sixth part summarizes the full text.
2. System Response Characteristics Under the Influence of Transmission Channel Faults
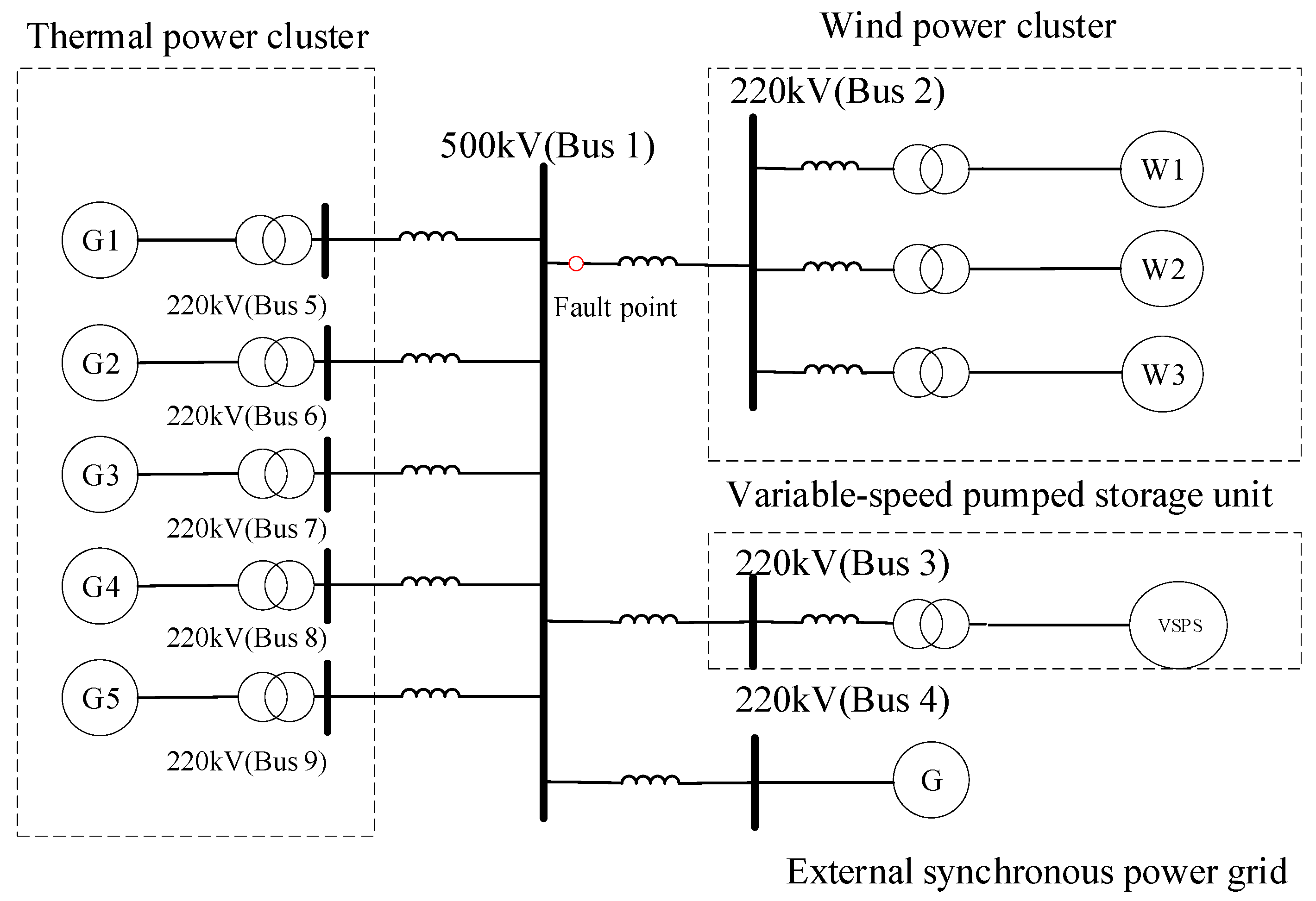
At present, regional power grids are closely interconnected. When a short-circuit grounding fault occurs on the 500-kilovolt power transmission line, the number of wind turbine units in the fault state that enter the low-voltage ride-through mode increases. In many wind turbines of large-scale new energy bases, the transient voltage drop may trigger the low-voltage ride-through protection, resulting in a sudden large shortage of active power. Before the wind turbine output recovers, the regional power grid with a high proportion of new energy sources has the risk of low-frequency oscillation. With the continuous large-scale integration of new energy into the power grid, the scale of wind power entering the low-voltage ride-through state under faults increases, and the system frequency will further decrease, posing the risk of triggering low-frequency load shedding actions. Usually, traditional methods mainly adopt the construction of backup channels between regional power grids to address this issue. However, this method has a long construction period. As shown in
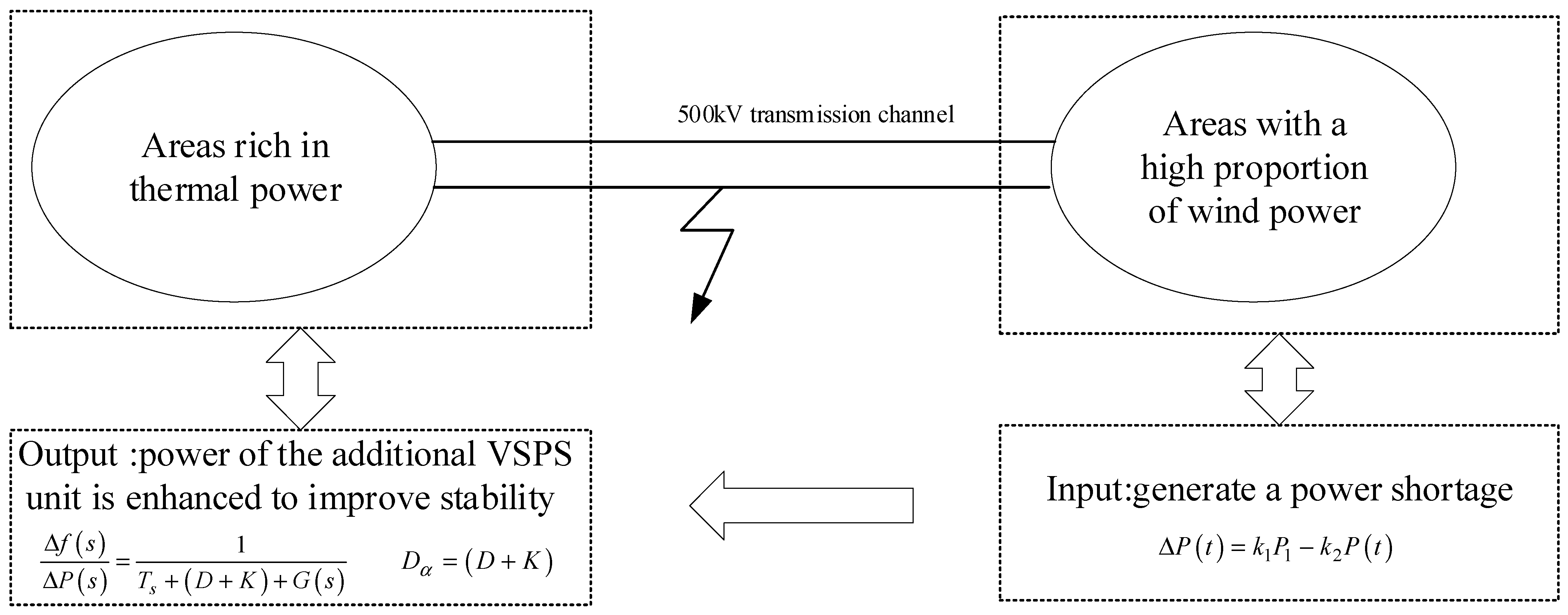
Figure 1, Region 1 is a region rich in thermal power, and Region 2 is a high-proportion wind power area with wind power clusters for external transmission. A large-scale and high-capacity energy storage device is urgently needed to intervene in the above situation to enhance the stability of the regional power system. The VSPS unit is one of the most effective methods.
Figure 1 shows the schematic diagram of transmission channel faults in the regions rich in thermal power and the high proportion of wind power areas. Take Equation (1), namely the power difference, as the input value into the system, and construct the frequency response model considering the power difference and containing the VSPS unit at the output, which is expressed by Equations (2) and (3).
The power shortfall caused by low-voltage ride-through of wind power clusters in areas with a high proportion of wind power can be expressed as Equation (1).
Let the power shortage caused during the fault and the wind power range of the high-proportion wind power transmission area affected by the fault be k1, and the active power recovery rate of the recovery area be k2. At the same time, set the total wind power output before the fault as P1, and the power shortage caused by the low-voltage ride-through of wind power as . The relationship between the power shortage caused by the low-voltage ride-through of wind power and time is .
Meanwhile, referring to the use of the standard transfer function to describe the equivalent dynamic model of the mixed prime mover and governor, the system damping of the generator damping D and the frequency coefficient K in the areas rich in thermal power and the areas with a high proportion of wind power are combined, and the overall transfer function relationship of the system is obtained as shown in Equation (2); the new damping coefficient is
, as shown in Equation (3).
Among them, represents the system transfer function, represents the perturbation power transfer function, and represents the perturbation frequency transfer function. is the new damping coefficient.
Furthermore, a new general model of SFR (system frequency response) was obtained. The frequency response of the power system mentioned in this paper refers to the change in the system frequency after the 500 kV connection line of the regional power system is disturbed by active power, as shown in
Figure 1. The process is shown in which the generator set in the system adjusts its output power through the governor and frequency regulation device to restore the system frequency to close to the rated value [
36,
37,
38,
39,
40]. In this model, it is no longer confined to specific prime mover and governor models, and thus is more applicable to the frequency response model of power systems containing thermal power units, VSPS units, and wind turbine clusters.
4. VSPS Dual-Channel Power Control Strategy Construction and Stability Analysis
4.1. Construction of Overall Power Control for VSPS
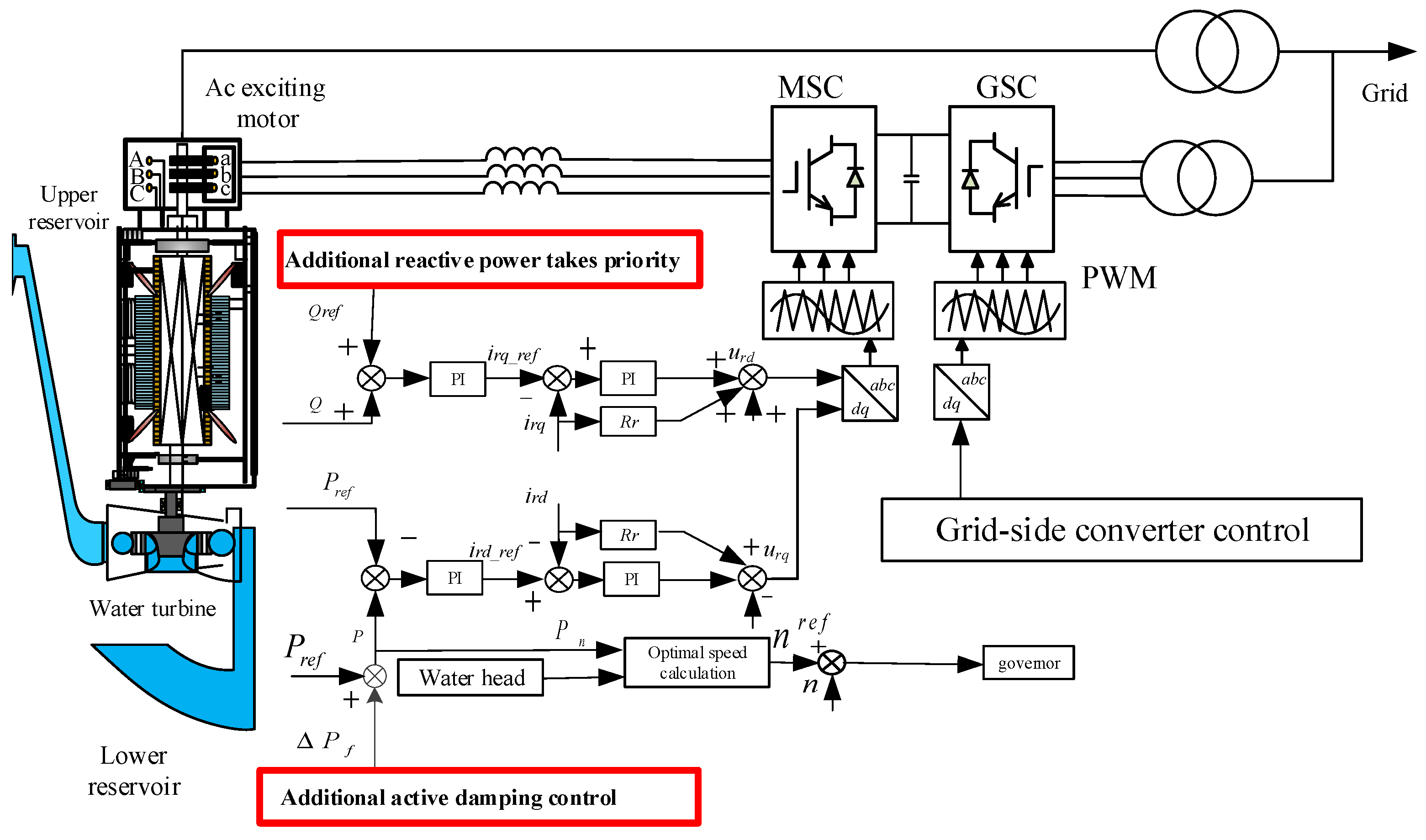
The VSPS unit is mainly composed of the hydraulic part, the mechanical part, and the electrical part. The hydraulic part mainly includes the upper reservoir, the lower reservoir, the water diversion pipe, etc. The mechanical part mainly includes the reversible pump turbine, the hydraulic ball valve, etc. The electrical part mainly includes the AC excitation motor, the converter and its control part, etc. This article mainly discusses the power control part. The power control of variable-speed pumped storage units is mainly divided into two parts: governor control and converter control. The governor control mainly manifests in the mechanical torque control of the water turbine generator, and the response speed to instantaneous power shortage is relatively slow. The converter control mainly manifests in the power electronic control part of the doubly fed converter, and through the AC excitation control, it performs decoupled control on the active and reactive power of the unit and the inertia response. Among them, the control objective of the grid-side converter is to maintain the stability of the DC voltage. Since the construction of the VSPS dual-channel power control strategy proposed in this paper mainly focuses on the unit measurement converter, the control part of the grid-side converter will not be further elaborated. The unit measurement converter consists of two parts: internal current control and external power control. It achieves power control by controlling the amplitude, frequency, and phase of the rotor current, while meeting the requirements of the external power system for the rapid support of active and reactive power. VSPS dual-channel power control refers to not merely controlling the active or reactive power output by the unit, but simultaneously generating both active and reactive power based on the reactive power output limit of the unit.
Figure 3 shows the overall control idea of VSPS in this paper and the construction idea of the dual-channel power control strategy.
Considering the control objective of the converter on the machine side, as well as the servo relationship between the rotor voltage on the machine side and the operation of the unit, the stator voltage-oriented vector control strategy is selected for the converter on the machine side. The synchronous rotating coordinate system selects the d-axis direction as the stator flux direction, and the stator resistance is ignored. In the steady state, the stator flux is a constant value, and the lagging voltage is 90°. The AC excitation motor model can be obtained as follows from Equations (6) and (7):
usd represents the d-axis voltage on the stator side, usq represents the q-axis voltage on the srotor side, and us represents the voltage on the stator side.
represents the d-axis flux linkage on the stator side, represents the q-axis flux linkage on the stator side, and represents the angular velocity on the stator side.
In the current inner loop control, the rotor current cannot be directly controlled, so it is necessary to achieve rotor current control indirectly through a medium. Through the converter on the machine side, the relationship between the rotor current and the excitation voltage can obtain the strategy to control the excitation voltage and thereby control the rotor current, to establish a connection between the stator and rotor magnetic fluxes. Ignoring the transient state of the stator magnetic flux, the relationship between the voltage and the current can be derived from Equation (8):
ird represents the current of the rotor’s d-axis,
irq represents the current of the rotor’s
q-axis,
urd represents the voltage of the rotor’s
d-axis, and
urq represents the voltage of the rotor’s
q-axis. Other meanings are the same as those mentioned in the previous formula. By observing Equation (8), it can be found that both voltage equations contain the
d-axis current and
q-axis current. This coupling phenomenon hinders the purpose of achieving separate control of the
dq components. To solve the coupling problem and achieve decoupling control, feedforward voltage compensation needs to be introduced to correct the control. Finally, the current inner loop control is obtained, the outer loop of the converter on the machine side is active and reactive power control, and after PI control, the reference value of the inner loop current is obtained, which can represent the outer loop control as shown in Equation (9),
isd represents the d-axis current on the machine side, isq represents the d-axis current on the network side, kp represents the proportionality coefficient, and ki represents the integration coefficient.
4.2. VSPS Reactive Power Priority Control Strategy
During the asynchronous operation of synchronous generators, numerous hazards can be triggered. When synchronous generators are operating in asynchronous mode, compared to the lagging mode, their excitation current significantly decreases, and the generator’s electromotive force also drops accordingly. The AC excitation variable-speed pumped storage units demonstrate strong asynchronous operation capabilities. The magnitude and relative position of the excitation magnetic field of the AC excitation generator are determined by the size and frequency of the excitation voltage, as well as their phase relationship with the stator voltage in the synchronous shaft system. By applying appropriate control strategies, the active power and reactive power output of the generator can be independently regulated, and the regulation of reactive power is a purely electromagnetic process with a very short transition period. Due to the increased freedom of excitation control, the position of the excitation magnetic field relative to the rotor can be effectively controlled. To provide reactive power support for the system during a grid voltage drop, not only does the unit need to be able to operate in parallel for a certain period, but it also needs to have the ability to provide dynamic reactive power support to the grid during faults and quickly return to normal operation after the grid fault is cleared. According to the principle of variable-speed pumped storage units and the principle of AC excitation converters, during a grid voltage drop, two reactive power sources can provide reactive power support for the grid: the AC excitation grid-side converter and the pumped storage unit itself. On one hand, the AC excitation grid-side converter can be controlled to operate in the “SVG(Static Var Generator)” mode during the voltage drop, but this requirement will increase the capacity of the AC excitation equipment; on the other hand, through the AC excitation rotor-side converter control, the variable-speed motor can be in the “strong excitation” state, output reactive power, and help restore the grid voltage.
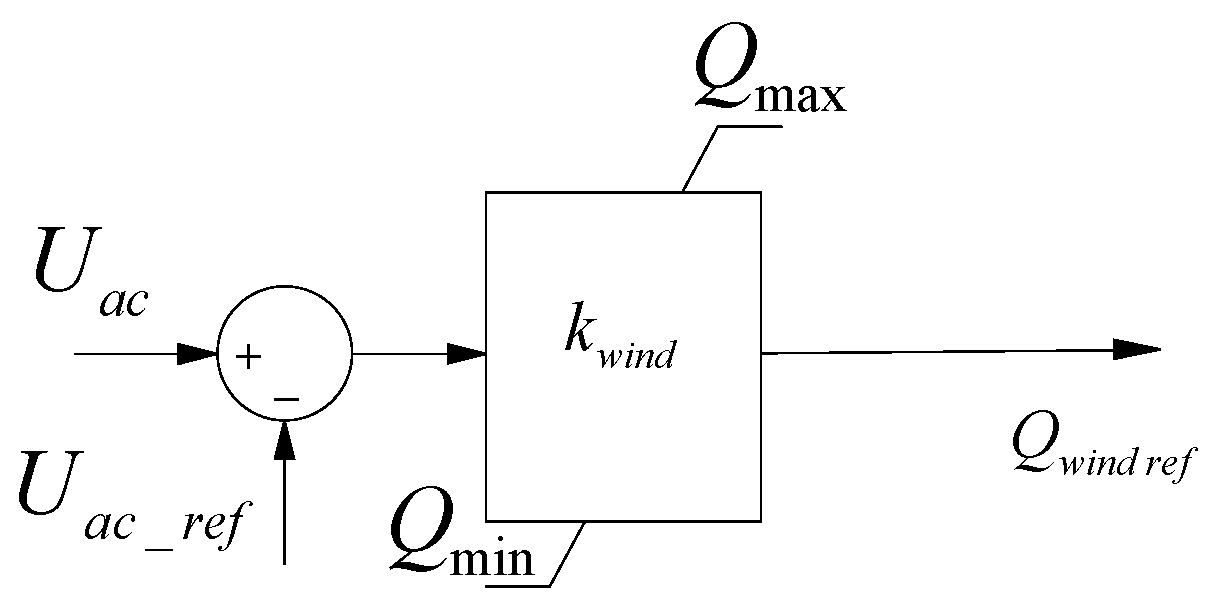
Since it is unreliable to transmit voltage change information to the control signal of the pumped storage through long-distance communication means, the receiving end converter station needs to accurately convert the information representing the wind farm cluster’s output side into the reactive power information required by the pumped storage. The essence of the reactive power priority support control strategy is reactive power–voltage drop control, and its control method can be expressed as Equation (10),
where
Kwind is the coupling coefficient between the output voltage of the wind farm cluster and the reactive power output by the VSPS machine-side converter. The reactive power priority control mode based on the Q-v curve proposed in this paper is shown in
Figure 4.
Figure 5 is the active power regulation system of reactive power priority control. The active power output must refer to the maximum and minimum output of reactive power in actual operation. The reference value of active power in
Figure 5 points to the power operation range calculated in
Figure 2.
The construction of the VSPS Reactive Power Priority Control Strategy first depends on the voltage sag signal of the AC transmission line, and refers to the previously calculated instantaneous maximum reactive power range that the VSPS can emit and the Q-v relationship. Finally, the reactive power priority control of the VSPS unit is obtained. The specific control idea is reflected in
Figure 4. Meanwhile, the VSPS unit has dual-channel power output capability. However, the maximum value of the active power output of the VSPS is limited by the reactive power output range of the VSPS. To prioritize the stability of the voltage, reactive power priority control is adopted. The specific control scheme is described in
Figure 5. And the relevant parameters are the same as those of Equations (10) and (11).
4.3. Construct Additional Damping Control for VSPS
Variable-speed pumped storage operates to dampen small power fluctuations by controlling the AC excitation. Currently, a virtual inertia frequency modulation control based on rotor kinetic energy is considered, which includes additional control links for the frequency change rate and frequency deviation. An additional frequency–power outer loop is added to the doubly fed generator control system, enabling the variable-speed pumped storage unit to have frequency response capabilities. The df/dt (differential) link is representative of the frequency change rate, and the Δf proportional link is representative of the dynamic frequency deviation. This additional frequency–power outer loop can rapidly change the output power of the unit, providing dynamic support for the system power.
The relationship between the grid frequency variation and power imbalance is reflected in Equation (12).
PG is the output power of a conventional synchronous generator, and Δf is the frequency change amount. D is the drop control coefficient. For grid frequency fluctuations, the relationship with frequency can be formed by the superposition of the inertia loop and the drop loop.
The unit on the variable-speed pumped storage side can obtain the change information of the receiving-end AC grid. Therefore, the power auxiliary control of the variable-speed pumped storage unit needs to respond to the fluctuations of the receiving end by responding to the frequency change information ∆ω received from the sending-end converter station, providing power support. An active damping controller is introduced to suppress the system’s low-frequency oscillation when a low-frequency oscillation occurs.
SN represents the rated capacity of the VSPS unit. The specific relationship is reflected in Equation (13)
where
kw is the coupling coefficient of variable-speed pumped storage,
Pref is the active power command of the variable-speed pumped storage unit, and
Padd reflects the additional power increment due to frequency change. The mentioned additional damping control mainly generates power compensation in the form of active damping control, mainly including the gain, phase compensation, and voltage-limiting part, and is combined with power compensation control considering frequency compensation. The construction of the control idea is shown as Equation (14).
Among them, the damping controller first collects the grid frequency, and then obtains the power after the amplitude correction, filtering link, phase correction, and limiting link, compensating for the change values.
Kvp is the amplitude correction parameter,
Tvp is the oscillation suppression time constant,
Tap and
Tbp are the phase correction parameters,
m is the correction order, and
s is the Laplacian operator.
Figure 6 shows the VSPS active power control considering active damping control.
To verify the stability of the VSPS active control with additional damping in the overall system control, the Bode plot and Nichols plot of the additional damping control system were analyzed. Starting from the gain coefficient
kvp in
Figure 6 of the additional damping control, the system Bode plots under different gain coefficients were analyzed, and the stability of the VSPS active control with additional damping under different frequencies and phases was analyzed. Seven different gain coefficients were set for analysis, among which the gain coefficient
kvp of curve linsys1 was 0.005, the gain coefficient
kvp of curve linsys2 was 0.010, the gain coefficient
kvp of curve linsys3 was 0.015, the gain coefficient
kvp of curve linsys4 was 0.025, the gain coefficient
kvp of curve linsys5 was 0.100, the gain coefficient
kvp of curve linsys6 was −0.015, and the gain coefficient
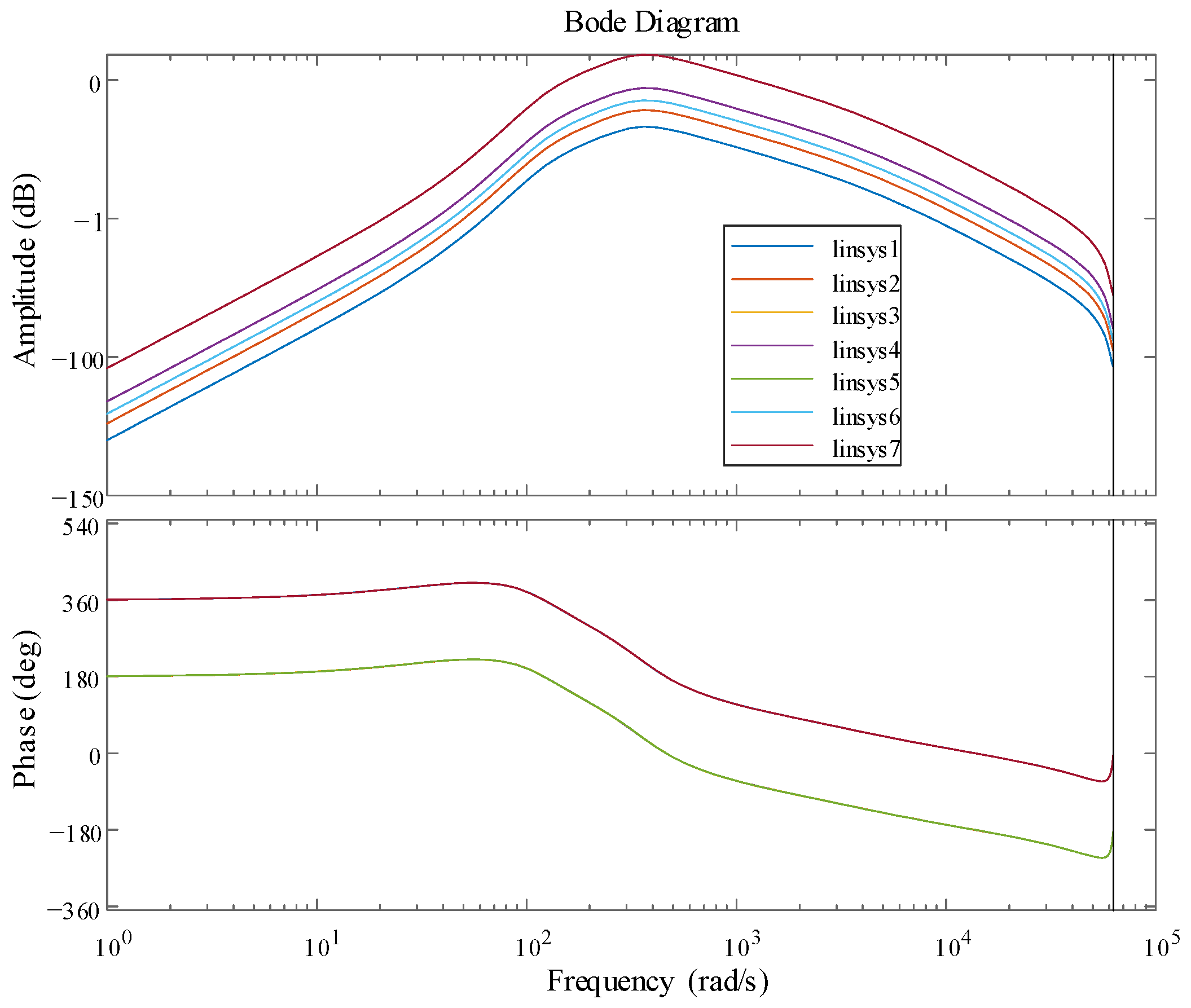
kvp of curve linsys7 was −0.100. The Bode plot considering the additional damping control is shown in
Figure 7.
As shown in
Figure 7, when the gain coefficient is positive, the peak amplitude (dB) gradually increases at different frequencies. The absolute values of curves linsys3 and linsys6 are the same, and the amplitude (dB) characteristics overlap. The absolute values of curves linsys4 and linsys7 are also the same, and the amplitude (dB) characteristics also overlap. Therefore, the amplitude (dB) characteristics are independent of the gain’s positive or negative sign. The gain coefficient does not affect the curves linsys1, 2, 3, 4, and 5, which overlap, and the curves linsys6 and 7 overlap. The phase (deg) characteristics are independent of the absolute value of the gain coefficient and only related to the positive or negative sign of the gain coefficient. To distinguish the overlapping curves, an analysis of the Nichols plot considering additional damping control is conducted, as shown in
Figure 8.
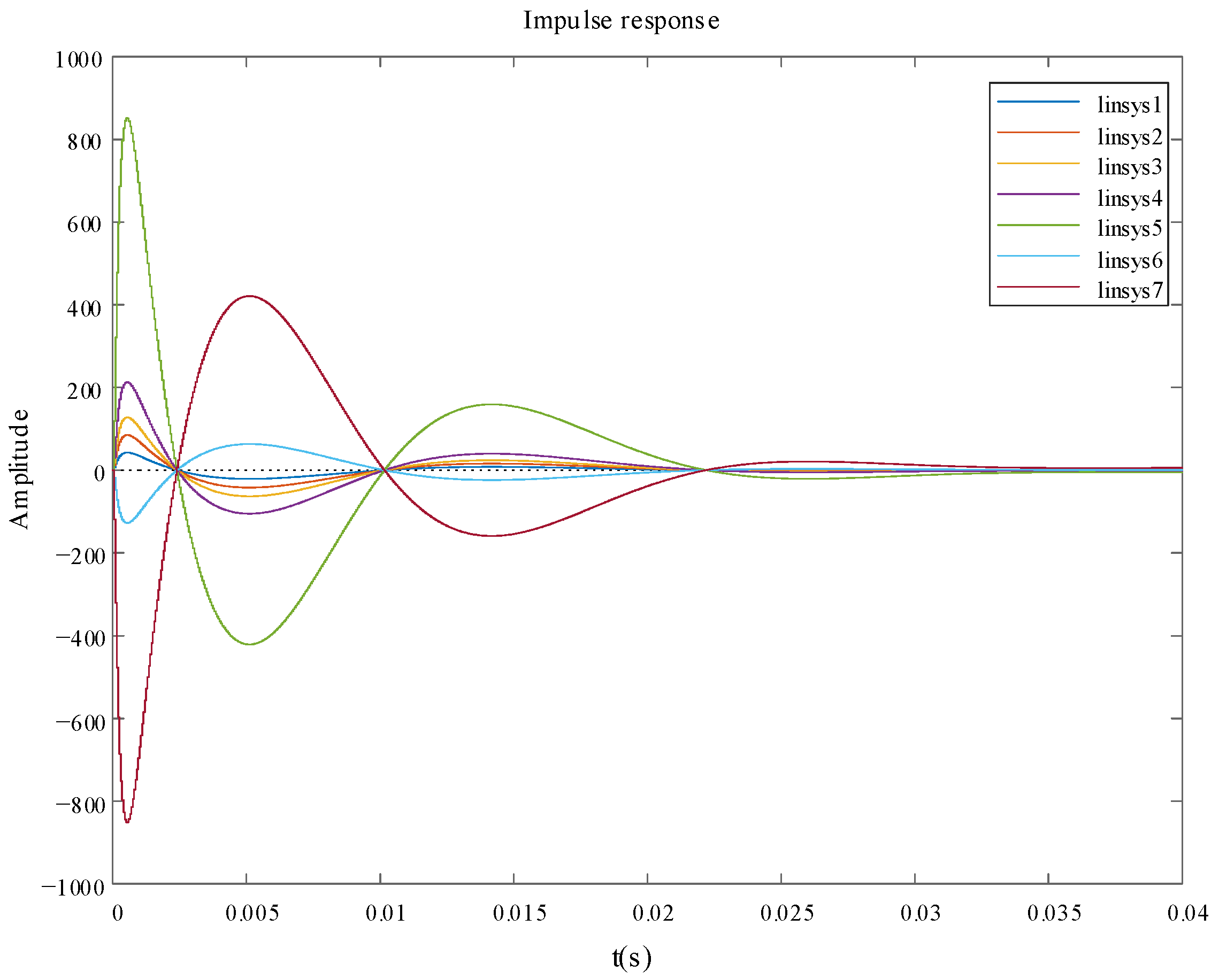
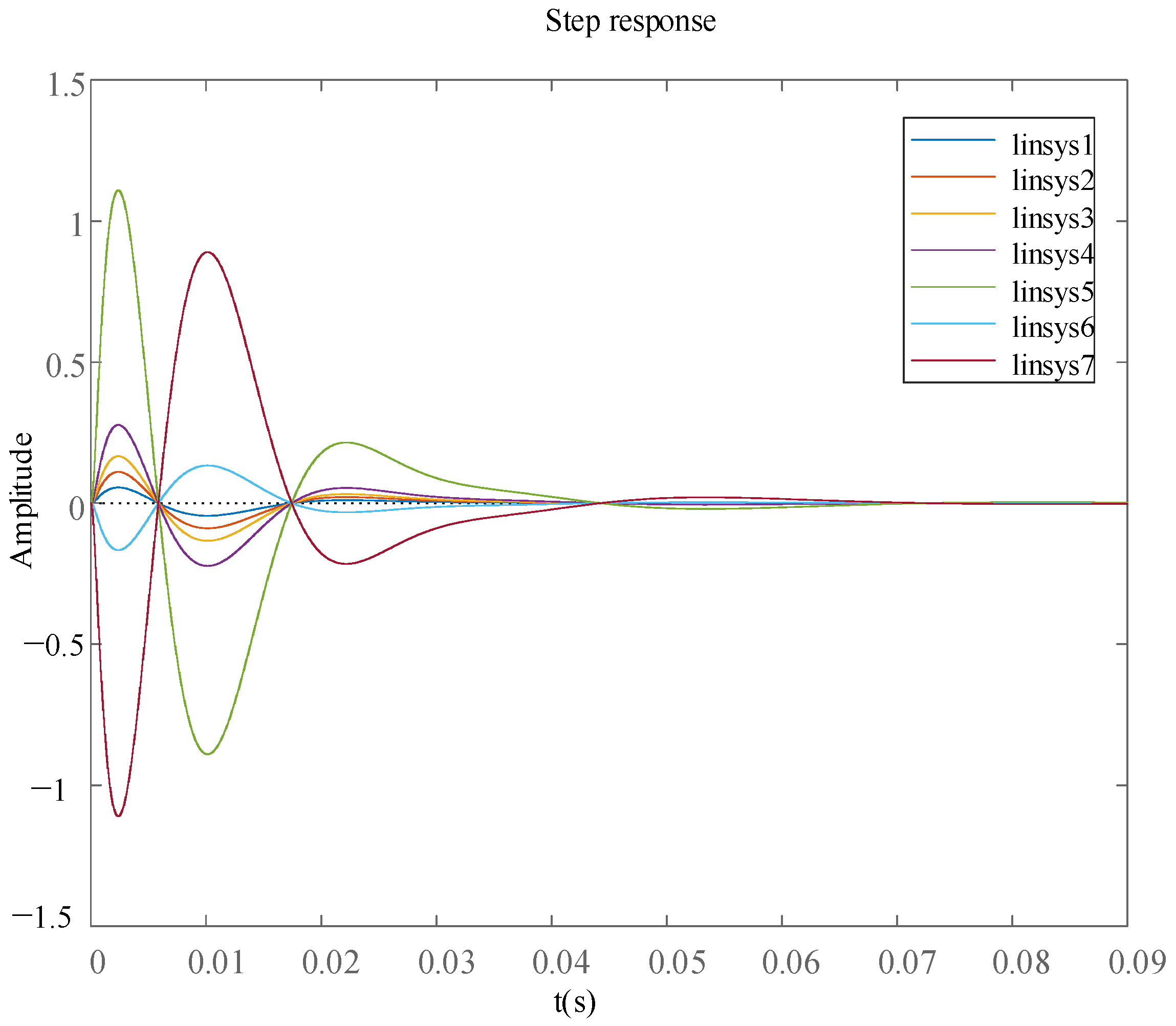
The Nichols plot curves under different gain coefficients were obtained, and all the curves in the Bode plot were separated. Except for linsys4 and linsys7, where the open-loop gain (dB) exceeded 0, all other gain coefficients were within 0. To analyze the response rate of the additional damping control, the step response and impulse response under different gain coefficients were analyzed. The coefficients of linsys1-7 were the same as those mentioned above.
Figure 9 shows the impulse response considering additional damping control, and
Figure 10 shows the step response considering additional damping control.
Based on the impulse response diagram considering the additional damping control as shown in
Figure 9, under different gain coefficients of the additional damping control, except for the initial state of the impulse response having a large fluctuation, it enters a stable state after 0.03 s. According to
Figure 10, considering the additional damping control, except for the initial state of the step response having a large fluctuation, it enters a stable state after 0.07 s.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}