
Optimization and Design of Built-In U-Shaped Permanent Magnet and Salient-Pole Electromagnetic Hybrid Excitation Generator for Vehicles


Abstract
1. Introduction
2. Structure and Working Principal Analysis of Hybrid Excitation Generator
2.1. Structure and Main Parameters of Hybrid Excitation Generator
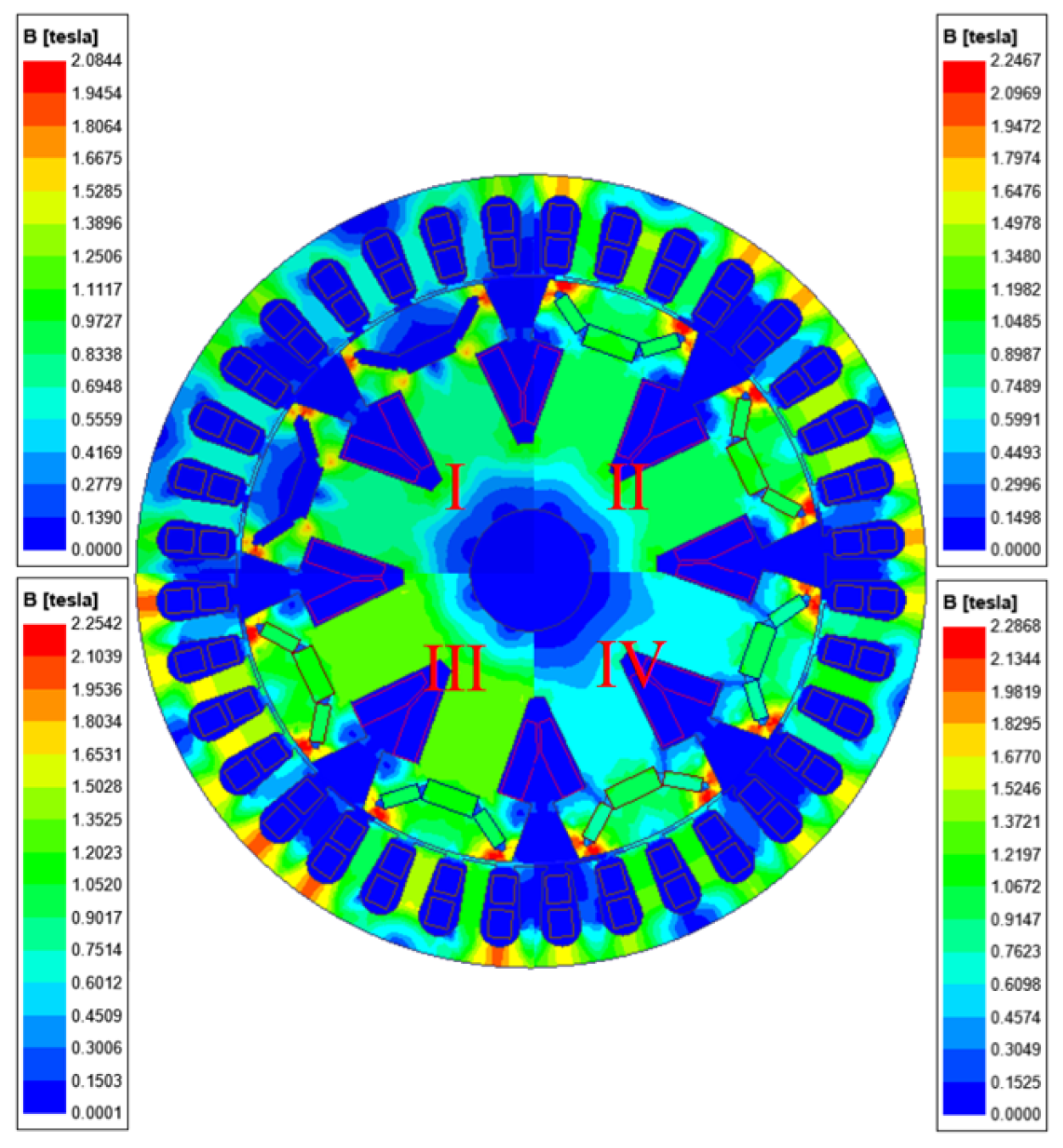
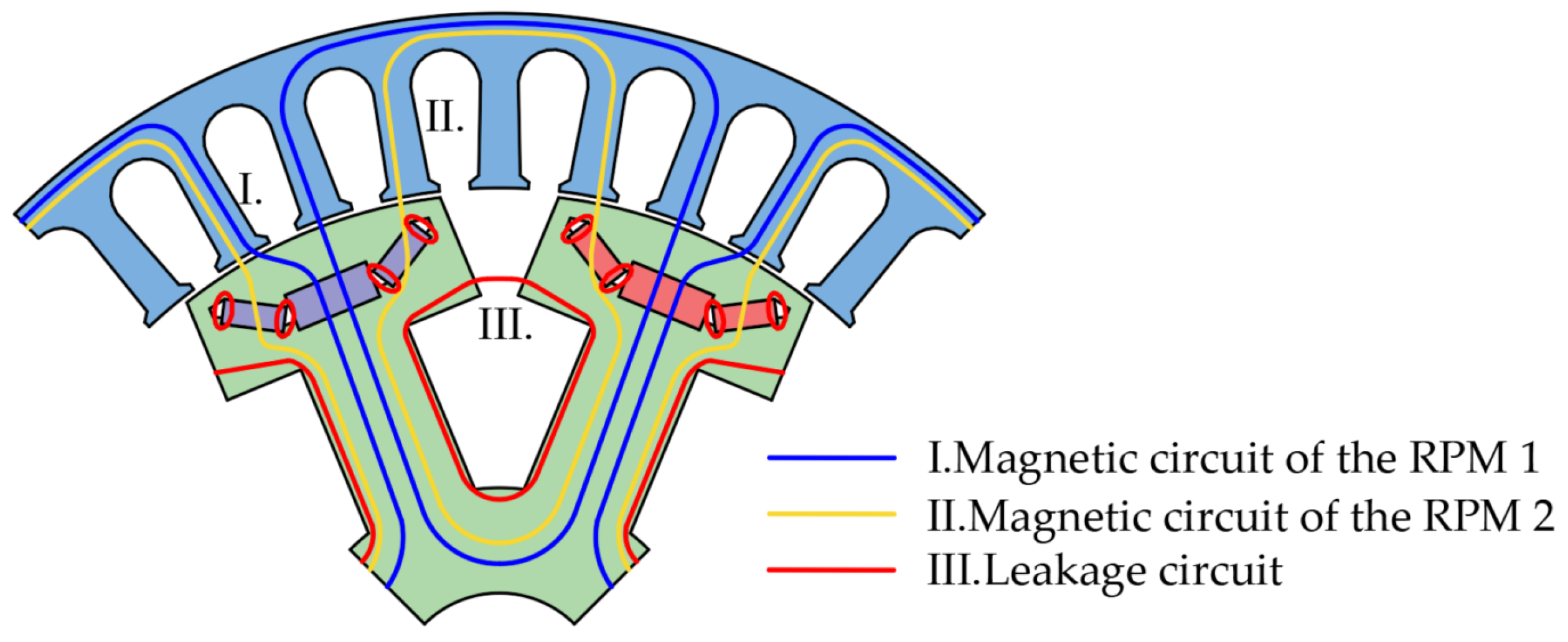
2.2. Magnetic Circuit Analysis of Hybrid Excitation Generator
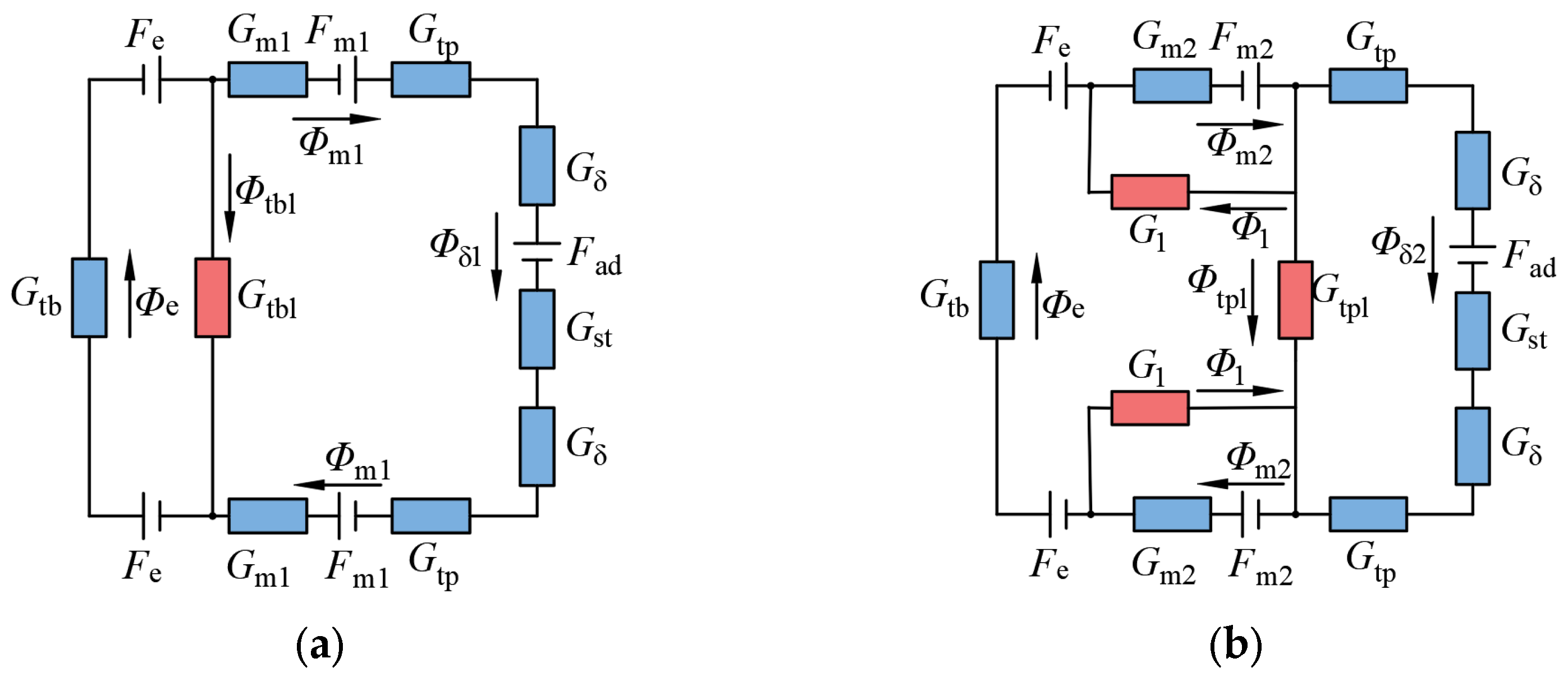
2.3. Analysis of Hybrid Excitation Generator Structural Parameters Based on the Equivalent Magnetic Circuit Method
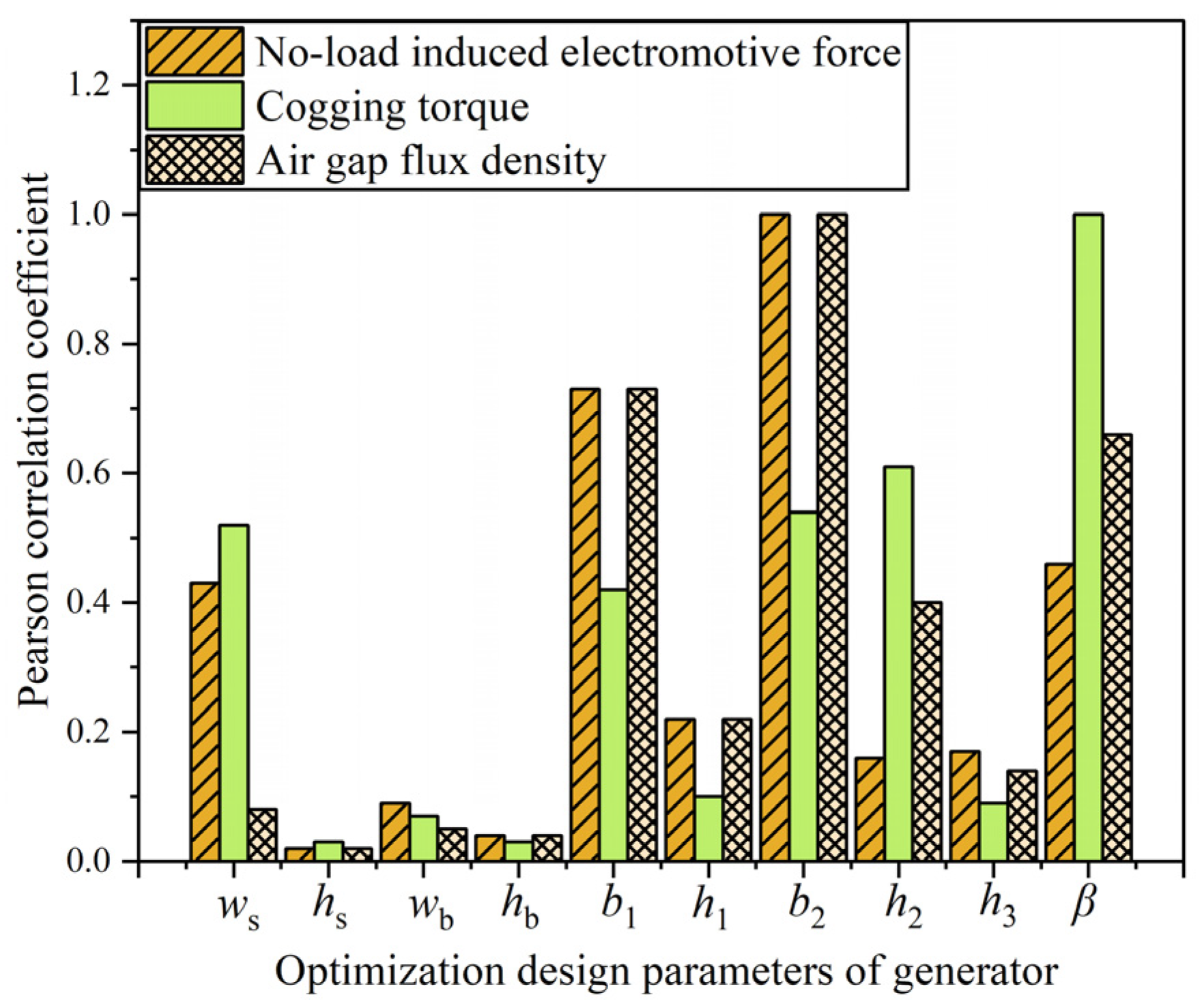
3. Optimization of Parameter Sensitivity Analysis
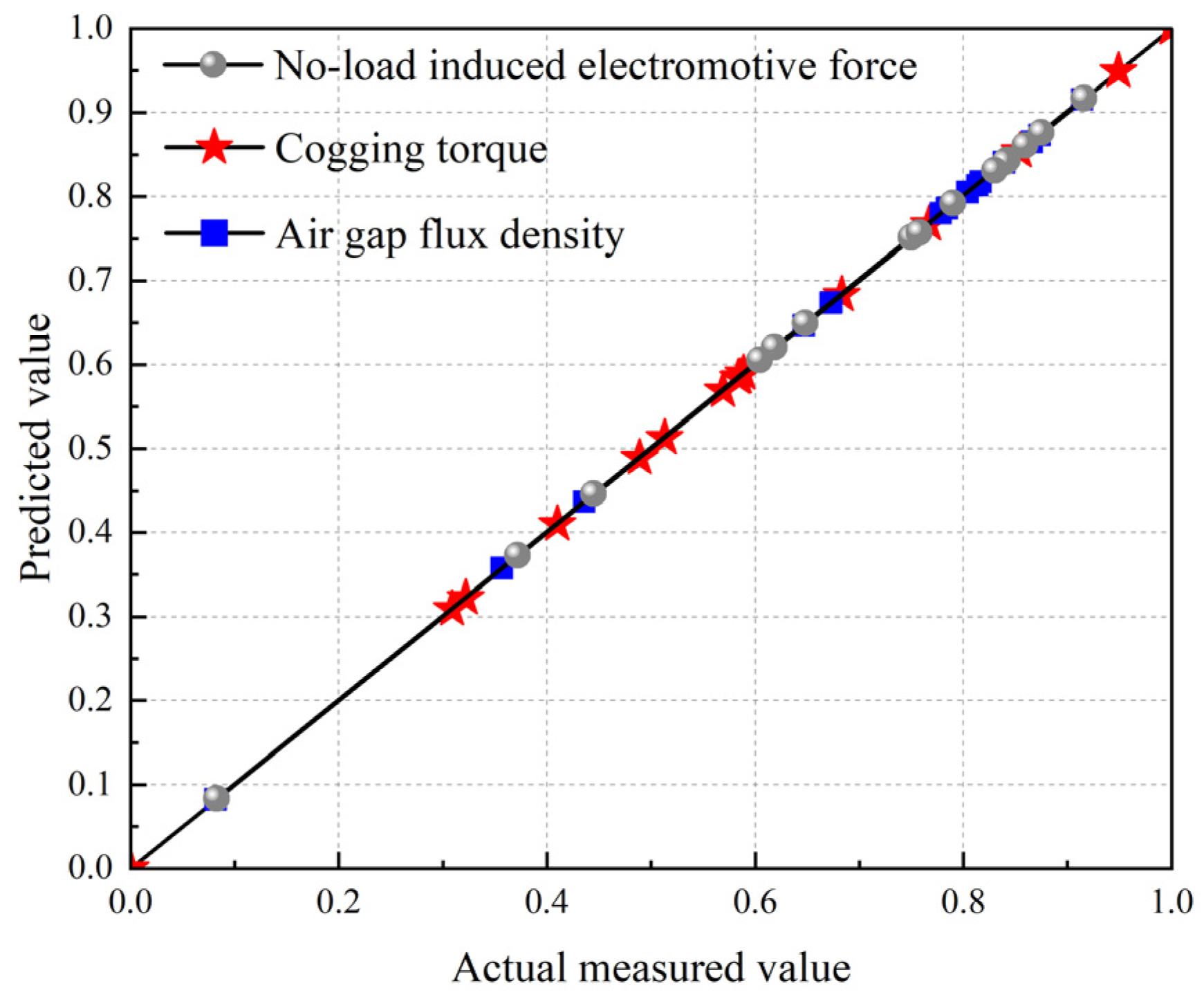
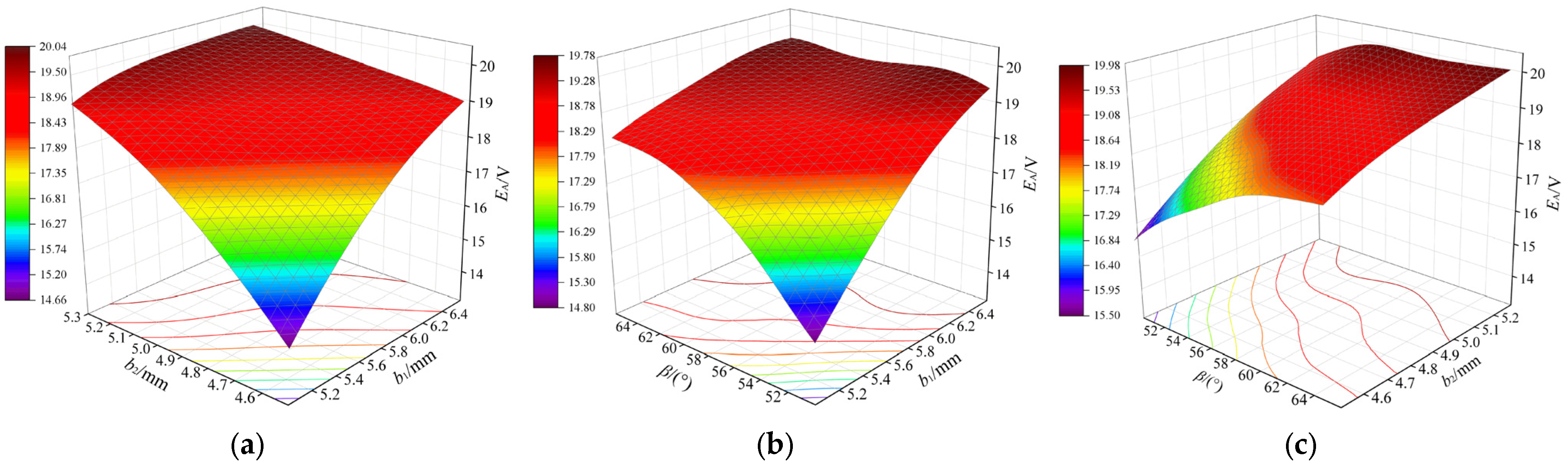
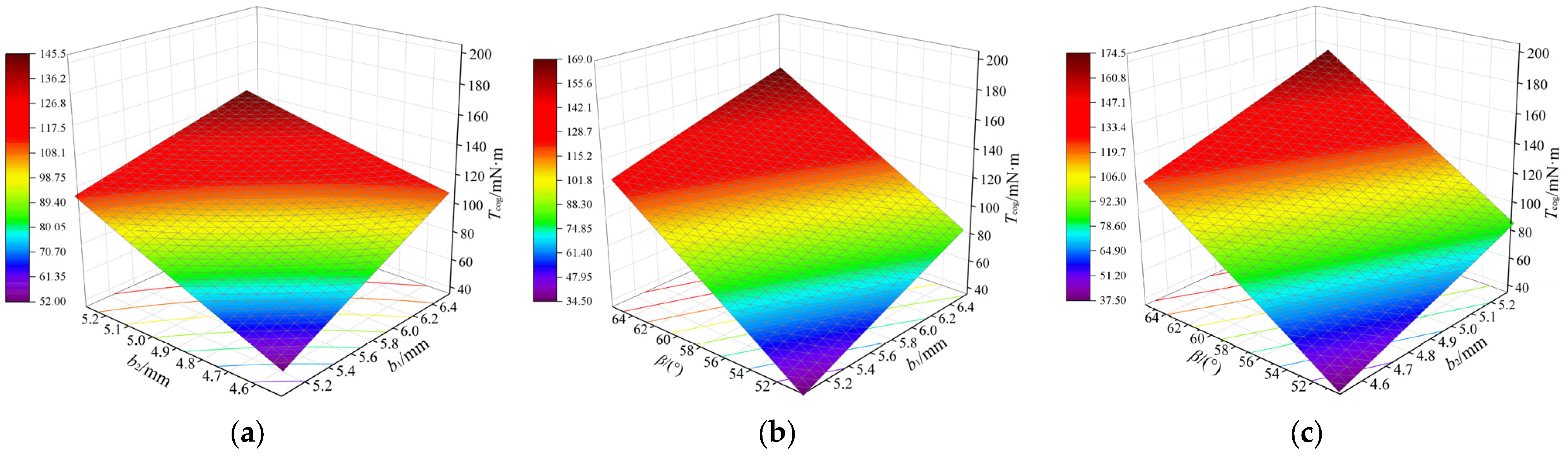
4. Establishment and Analysis of Response Surface Model
5. Multi-Objective Optimization and Simulation Verification
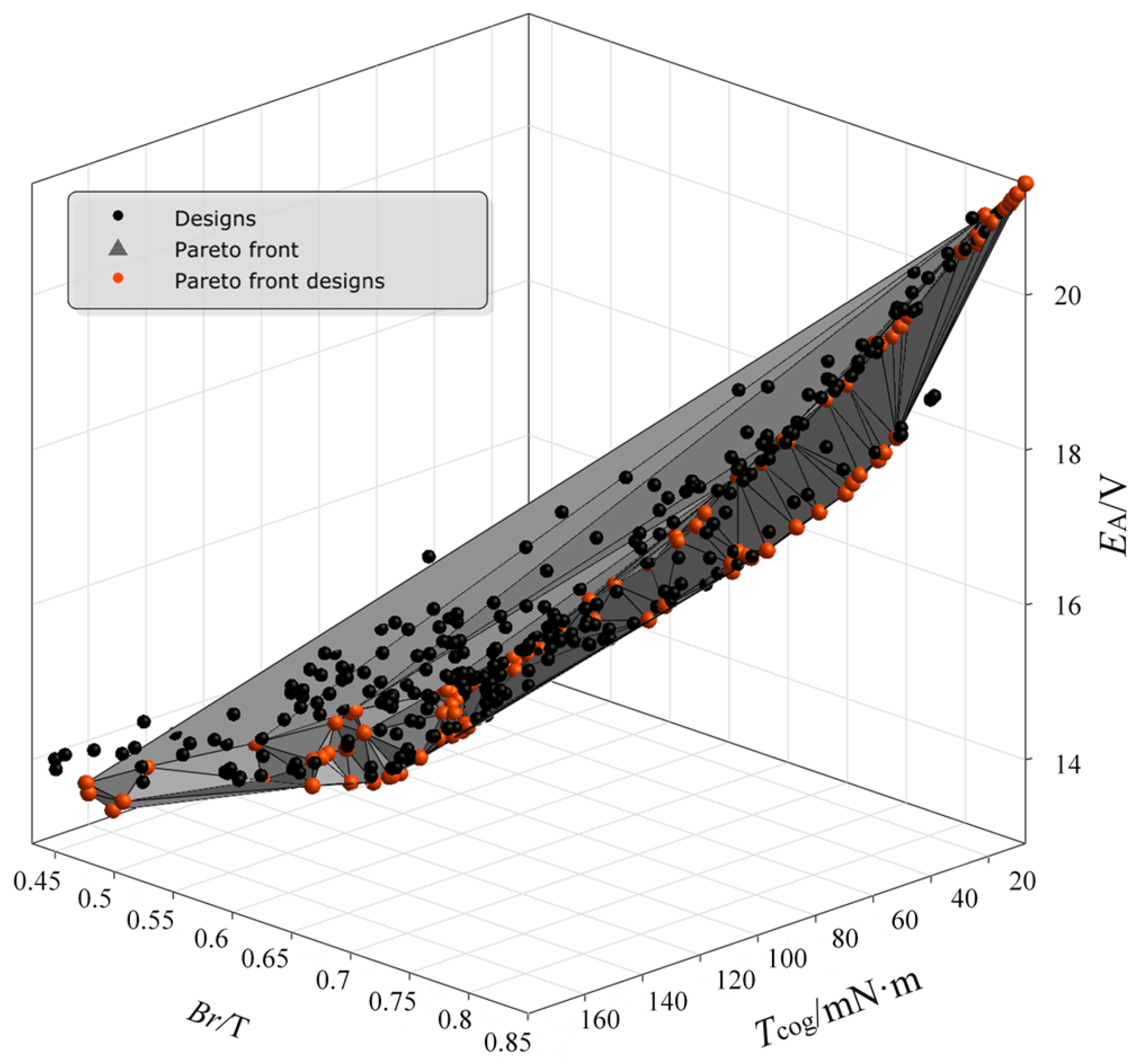
5.1. Multi-Objective Optimization
5.2. Simulation Verification
6. Experimental Verification
7. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, X.; Du, Q.; Xu, J.; Zhao, Y.; Ma, S. Development and Analysis of the Magnetic Circuit on Double-Radial Permanent Magnet and Salient-Pole Electromagnetic Hybrid Excitation Generator for Vehicles. Chin. J. Mech. Eng. 2019, 32, 33. [Google Scholar] [CrossRef]
- Zhao, C.; Qin, H.; Zhang, Z.; Yan, Y. Structural and Principle Analysis of Radial Structure Hybrid Excitation Synchronous Generator with Magnetic Shunt. Proc. CSEE 2008, 28, 145–150. [Google Scholar] [CrossRef]
- Ma, S.; Zhang, X.; Du, Q.; Shi, L.; Meng, X. Optimization Design of a New Type of Interior Permanent Magnet Generator for Electric Vehicle Range Extender. J. Electr. Comput. Eng. 2019. [Google Scholar] [CrossRef]
- Zhu, C.Q.; Wang, X.H.; Yang, Y.B.; Shen, Y.M.; Yu, P.J.; Zhang, G.B. Structural and Voltage Regulation Analysis of Parallel Hybrid Excitation Synchronous Generator under Double-Pole Induction. Proc. CSEE 2020, 40, 7890–7898+8226. [Google Scholar] [CrossRef]
- Yang, H.; Zheng, H.; Zhu, Z.Q.; Lin, H.Y.; Lyu, S.K.; Pan, Z.B. Comparative Study of Partitioned Stator Memory Machines with Series and Parallel Hybrid PM Configurations. IEEE Trans. Magn. 2019, 55, 1–8. [Google Scholar] [CrossRef]
- Xiu, W.; Dong, Q.; Chang, Z. Finite Element Analysis of Magnetic Field Regulation Characteristics of New Type of Hybrid Excitation Brushless Claw-Pole Generator. J. Electr. Control Eng. 2013, 17, 99–104. [Google Scholar] [CrossRef]
- Dong, Q.; Xiu, W.; Chang, Z. Analysis and Experimental Study of Magnetic Field Regulation Characteristics of New Type of Hybrid Excitation Brushless Claw-Pole Generator. Proc. CSEE 2013, 33, 115–121. [Google Scholar] [CrossRef]
- Geng, W.; Zhang, Z.; Yu, L.; Yan, Y. Structure Principle and Magnetic Field Regulation Characteristics of New Type of Parallel Hybrid Excitation Brushless DC Motor. Trans. China Electrotech. Soc. 2013, 28, 131–137+154. [Google Scholar] [CrossRef]
- Chao, Z. Structure Design and Characteristics of Series Magnetic Circuit Hybrid Excitation Claw-Pole Generator. Trans. China Electrotech. Soc. 2009, 24, 1–6+12. [Google Scholar] [CrossRef]
- Zhuo, Z.; Dong, W.; Wei, H. Review and Prospect of Structure Principle, Design and Operation Control Technology of Hybrid Excitation Motor. Proc. CSEE 2020, 40, 7834–7850+8221. [Google Scholar] [CrossRef]
- Zhu, X.Y.; Cheng, M.; Zhao, W.X.; Zhang, J.Z.; Hua, W. Review and Prospect of Hybrid Excitation Motor Technology. Trans. China Electrotech. Soc. 2008, 23, 30–39. [Google Scholar] [CrossRef]
- Gu, X.; Zhang, Z.; Sun, L.; Yu, L. Magnetic Field Enhancement Characteristic of an Axially-Parallel Hybrid Excitation DC Generator. IEEE Trans. Magn. 2020, 99, 1. [Google Scholar] [CrossRef]
- Gu, X.; Zhang, Z.; Sun, L.; Yu, L. Phase Displacement Characteristics of a Parallel Hybrid Excitation Brushless DC Generator. IEEE Trans. Energy Convers. 2020, 35, 875–885. [Google Scholar] [CrossRef]
- Gong, H.L.; Zhang, Y.Z.; Wang, L.; Zhao, Y.J.; Hu, L.J.; Zhang, C.L. Rotor Pole Matching of Parallel Rotor Hybrid Excitation Synchronous Generator. J. Electr. Control Eng. 2020, 24, 128–137. [Google Scholar] [CrossRef]
- Yan, S.; Zhang, X.; Zhang, J.; Zhang, Y.; Xu, M.; Gao, T.; Hua, S. Magnetic Field Analysis and Performance Optimization of Dual-Rotor Hybrid Excitation Generator for Automobile. Machines 2022, 10, 816. [Google Scholar] [CrossRef]
- Geng, H.; Zhang, X.; Yan, S.; Tong, L.; Ma, Q.; Xu, M.; Zhang, Y.; Han, Y. Magnetic Field Analysis and Performance Optimization of Hybrid Excitation Generators for Vehicles. Sustain. Energy Technol. Assess. 2022, 52, e102222. [Google Scholar] [CrossRef]
- Hu, W.; Zhang, X.; Geng, H.; Gao, T.; Shi, L.; You, D. Electromagnetic Design and Flux Regulation Analysis of New Hybrid Excitation Generator for Electric Vehicle Range Extender. J. Electr. Comput. Eng. 2021, 2021, 5547517. [Google Scholar] [CrossRef]
- Wang, M.; Kou, B.; Zhang, L.; Zhao, Y.; Xu, J. A Novel Hybrid Excitation Doubly Salient Generator with Separated Windings by PM Inserted in Stator Slot for HEVs. Energies 2022, 15, 7968. [Google Scholar] [CrossRef]
- Wei, C.; Wu, Q.; Bao, J.; Yan, Q.; Wang, S.; Sui, Y.; Wei, F. Structural Design and Parameter Optimization of Parallel Claw-Pole Hybrid Excitation Motor for New Energy Vehicles. Sci. Technol. Eng. 2025, 25, 1496–1502. [Google Scholar] [CrossRef]
- Guo, Y.; Jin, P.; Lin, H.; Yang, H.; Lyu, S. Design and Analysis of a Flux Intensifying Permanent Magnet Embedded Salient Pole Wind Generator. AIP Adv. 2018, 8, 056627. [Google Scholar] [CrossRef]
- Geng, H.; Zhang, X.-Y.; Gao, Y.; Yan, S.; Zhang, Y.; Han, Y.; Wang, L.; Hua, S. Performance Analysis and Optimization of Built-In Permanent Magnet and Salient-Pole Electromagnetic Hybrid Excitation Generators for Vehicles. J. Eng. 2022, 2022, 1–19. [Google Scholar] [CrossRef]
- Geng, H.; Zhang, X.; Zhang, Y.; Hu, W.; Lei, Y.; Xu, X.; Wang, A.; Wang, S.; Shi, L. Development of Brushless Claw Pole Electrical Excitation and Combined Permanent Magnet Hybrid Excitation Generator for Vehicles. Energies 2020, 13, 4723. [Google Scholar] [CrossRef]
- Shi, Y.; Xue, Z.; Yan, G. Influence of Rotor Internal Slotting on Cogging Torque of Segmented Permanent Magnet Synchronous Motor. J. Xi’an Univ. Technol. 2022, 38, 433–441. [Google Scholar] [CrossRef]
- Ma, S.; Chen, K.; Zhang, Q. Analysis of Multi-Objective Optimization Design of Interior Double Radial and Tangential Combined Magnetic Pole Permanent Magnet Drive Motor for Electric Vehicles. World Electr. Veh. J. 2024, 15, 4. [Google Scholar] [CrossRef]
- Huang, C.; Li, S.; Liu, X.; Sun, Y. Multi-Objective Optimization Method of Permanent Magnet Assisted Synchronous Reluctance Motor Based on KELM-NSGA-II. Sci. Technol. Eng. 2025, 25, 1065–1074. [Google Scholar]
- Gandarillas, V.; Joshy, A.J.; Sperry, M.Z.; Ivanov, A.K.; Hwang, J.T. A Graph-Based Methodology for Constructing Computational Models that Automates Adjoint-Based Sensitivity Analysis. Struct. Multidiscip. Optim. 2024, 67, 5. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Numerical Value | Parameters | Numerical Value |
|---|---|---|---|
| Rated power/W | 1000 | Stator–rotor axial length/mm | 24 |
| Rated speed/(r/min) | 3000 | Stator outer diameter/mm | 110 |
| Number of poles/slots | 8/36 | Stator inner diameter/mm | 82 |
| Rated voltage/V | 14 | Rotor outer diameter/mm | 81 |
| Parameters | Range of Values | Parameters | Range of Values |
|---|---|---|---|
| ws/mm | 21~23.5 | h1/mm | 2~3 |
| hs/mm | 9~11 | b2/mm | 4.5~5.5 |
| wb/mm | 10~13 | h2/mm | 2~2.5 |
| hb/mm | 10~13.5 | h3/mm | 4~6 |
| b1/mm | 5~7.7 | β/(°) | 50~65 |
| Parameters | Pearson Correlation Coefficient Weights | Integrated Sensitivity/% | ||
|---|---|---|---|---|
| |SEMF (0.25)| | |STcog (0.25)| | |SBr (0.5)| | ||
| ws | 0.430 | 0.523 | 0.079 | 0.063 |
| hs | 0.023 | 0.026 | 0.023 | 0.012 |
| wb | 0.087 | 0.070 | 0.047 | 0.063 |
| hb | 0.036 | 0.035 | 0.042 | 0.039 |
| b1 | 0.730 | 0.424 | 0.729 | 0.653 |
| h1 | 0.218 | 0.098 | 0.217 | 0.187 |
| b2 | 1.000 | 0.541 | 1.000 | 0.885 |
| h2 | 0.162 | 0.610 | 0.401 | 0.394 |
| h3 | 0.166 | 0.094 | 0.137 | 0.086 |
| β | 0.456 | 1.000 | 0.661 | 0.694 |
| Serial Number | Optimization Parameters | Optimization Goals | ||||
|---|---|---|---|---|---|---|
| b1/mm | b2/mm | β/(°) | EA/(V) | Tcog/(mN∙m) | Br/(T) | |
| 1 | 6.17 | 4.73 | 58.50 | 18.2714 | 59.303 | 0.7015 |
| 2 | 5.63 | 5.00 | 59.50 | 18.4952 | 69.126 | 0.7139 |
| 3 | 7.61 | 4.93 | 52.50 | 20.2502 | 67.622 | 0.7944 |
| 4 | 5.81 | 5.47 | 63.50 | 19.7596 | 106.77 | 0.7932 |
| 5 | 7.43 | 5.33 | 53.50 | 20.6093 | 79.282 | 0.8247 |
| 6 | 5.09 | 5.40 | 51.50 | 18.5077 | 40.793 | 0.6954 |
| 7 | 5.99 | 4.60 | 62.50 | 16.4341 | 51.213 | 0.6295 |
| 8 | 5.27 | 4.80 | 61.50 | 15.7405 | 42.145 | 0.5993 |
| 9 | 6.89 | 5.27 | 57.50 | 20.1824 | 87.989 | 0.8079 |
| 10 | 7.07 | 4.87 | 64.50 | 19.6449 | 112.00 | 0.7892 |
| 11 | 6.53 | 5.13 | 55.50 | 19.7269 | 69.687 | 0.7725 |
| 12 | 7.25 | 4.67 | 54.50 | 19.4750 | 61.784 | 0.7558 |
| 13 | 6.35 | 5.07 | 56.50 | 19.4214 | 69.175 | 0.7593 |
| 14 | 5.45 | 4.53 | 50.50 | 13.3469 | 8.9281 | 0.4796 |
| 15 | 6.71 | 5.20 | 60.50 | 19.9521 | 96.960 | 0.8011 |
| Serial Number | b1/mm | b2/mm | β/(°) | EA/(V) | Tcog/(mN∙m) | |
|---|---|---|---|---|---|---|
| 1 | 5.43 | 4.50 | 50.05 | 13.481 | 56.64 | 0.481 |
| 15 | 5.44 | 4.51 | 50.09 | 13.654 | 61.62 | 0.486 |
| 52 | 5.51 | 4.50 | 51.07 | 15.416 | 77.33 | 0.532 |
| ⋯⋯ | ⋯⋯ | ⋯⋯ | ⋯⋯ | ⋯⋯ | ⋯⋯ | ⋯⋯ |
| 171 | 7.47 | 5.04 | 58.03 | 20.335 | 143.27 | 0.798 |
| 218 | 7.45 | 5.04 | 56.03 | 20.324 | 114.45 | 0.797 |
| 386 | 7.30 | 5.10 | 53.04 | 19.78 | 87.44 | 0.768 |
| Parameters | ws/mm | hs/mm | wb/mm | hb/mm | h3/mm | b1/mm | h1/mm | b2/mm | β/(°) | h2/mm |
|---|---|---|---|---|---|---|---|---|---|---|
| Before optimization | 22.87 | 10.7 | 12.3 | 10.2 | 5.7 | 5.3 | 2.6 | 5.1 | 64.8 | 2.3 |
| After optimization | 22 | 10 | 11.6 | 13.8 | 6 | 7.4 | 3 | 5.3 | 53.5 | 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, K.; Ma, S.; Li, C.; Wu, Y.; Ma, J. Optimization and Design of Built-In U-Shaped Permanent Magnet and Salient-Pole Electromagnetic Hybrid Excitation Generator for Vehicles. Symmetry 2025, 17, 897. https://doi.org/10.3390/sym17060897
Chen K, Ma S, Li C, Wu Y, Ma J. Optimization and Design of Built-In U-Shaped Permanent Magnet and Salient-Pole Electromagnetic Hybrid Excitation Generator for Vehicles. Symmetry. 2025; 17(6):897. https://doi.org/10.3390/sym17060897
Chicago/Turabian StyleChen, Keqi, Shilun Ma, Changwei Li, Yongyi Wu, and Jianwei Ma. 2025. "Optimization and Design of Built-In U-Shaped Permanent Magnet and Salient-Pole Electromagnetic Hybrid Excitation Generator for Vehicles" Symmetry 17, no. 6: 897. https://doi.org/10.3390/sym17060897
APA StyleChen, K., Ma, S., Li, C., Wu, Y., & Ma, J. (2025). Optimization and Design of Built-In U-Shaped Permanent Magnet and Salient-Pole Electromagnetic Hybrid Excitation Generator for Vehicles. Symmetry, 17(6), 897. https://doi.org/10.3390/sym17060897