
Bezier Curves and Surfaces with the Generalized α-Bernstein Operator



Abstract
1. Introduction
2. Preliminaries
3. Main Results
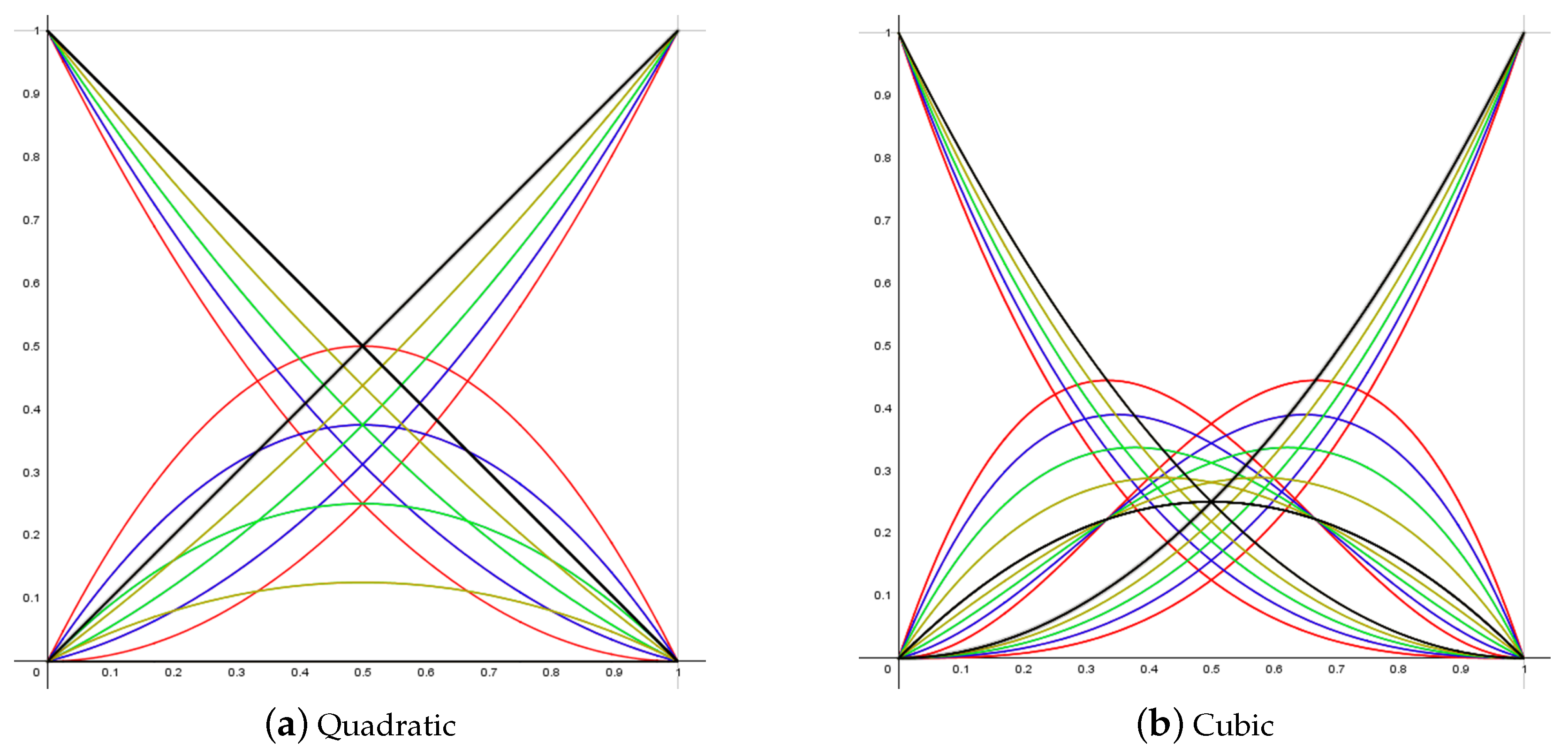
3.1. The Properties of the Generalized -Bernstein Operator
- Degeneracy: For , the generalized -Bernstein operator is reduced into the classic Bernstein operator.The result follows from relation (6) in Proposition 2.
- Non-negativity: The generalized -Bernstein polynomials are non-negative for .
- Partition of unity: The generalized -Bernstein operator is normalized, that is, .By utilizing relation (6), we haveFurther, by making the appropriate change in indices as and due to the classic Bernstein operator summing to 1, we obtain
- Linear independence: The generalized -Bernstein polynomials are linearly independent, that is, , for .Proof.We establish this property through induction on n. The sufficient part of the result is clear. The necessary part can be carried out as follows. For , let us consider the linear combination , where . By using (6) and making some algebraic manipulations, we haveAs the classic Bernstein polynomials are linearly independent (see [32]), we obtain the following system of equations:Clearly, if , then from relations in , . If , then from the relation given in , . This results as a consequence in upon the consideration of the two equations in . Now, assume that the linear independence holds for . Thus, for , we considerBy recalling the recursive definition of the generalized -Bernstein operator given in (5), we re-express the last equation as follows:In view of the fact that the parameter s is an arbitrary real number in the interval , we conclude thatBy recalling that when or and by considering our inductive hypothesis, that is, , we clearly deduce that for , which completes the proof. □
- Symmetry: The generalized -Bernstein operator is symmetric such thatProof.We prove this through induction on n. For , the property is easy to validate from relation (4). Further, assume that it holds for . Next, for , and from (5), we first writewith the replacement of s with . Furthermore, by utilizing our inductive hypothesis and using the recursive expression (5), we re-express the right-hand side of the above relation as follows:which completes the proof. □
- End-points: At the end-points, the generalized -Bernstein operator has the same properties as those of the classic Bernstein operator, that is, forProof.The proof is induced on n. For , it is clear that the property holds from (4). Now, assume that the property holds for . Then, for and by considering (5), we have where . From the inductive hypothesis, we obtain the following:Similarly, for and from (5), we obtain . Further, from the inductive hypothesis, we can complete the proof with the following:□
- Derivatives at the corner points: The first derivatives of the generalized -Bernstein polynomials at the end-points are given as follows:andProof.Similar to the above, the proof is induced on n. By taking the first-order derivative of (4), we haveFor , it is clear to see that the given expressions hold when they are evaluated at and , respectively. Now, let us suppose that the expressions hold for . Then, for and from (5), we haveBy taking the derivative of this expression and evaluating it at , we haveNext, by considering the inductive hypothesis and the end-point properties, we can provide the following conclusions:if , then ,if , then ,and finallyif , then .By following similar steps for , the proof is completed. □
- Second-order derivatives: The second-order derivatives of the generalized -Bernstein polynomials at the end-points are given as follows:Proof.Parallel to the above, the proof can be achieved by using induction on n where the initial step starts with . □
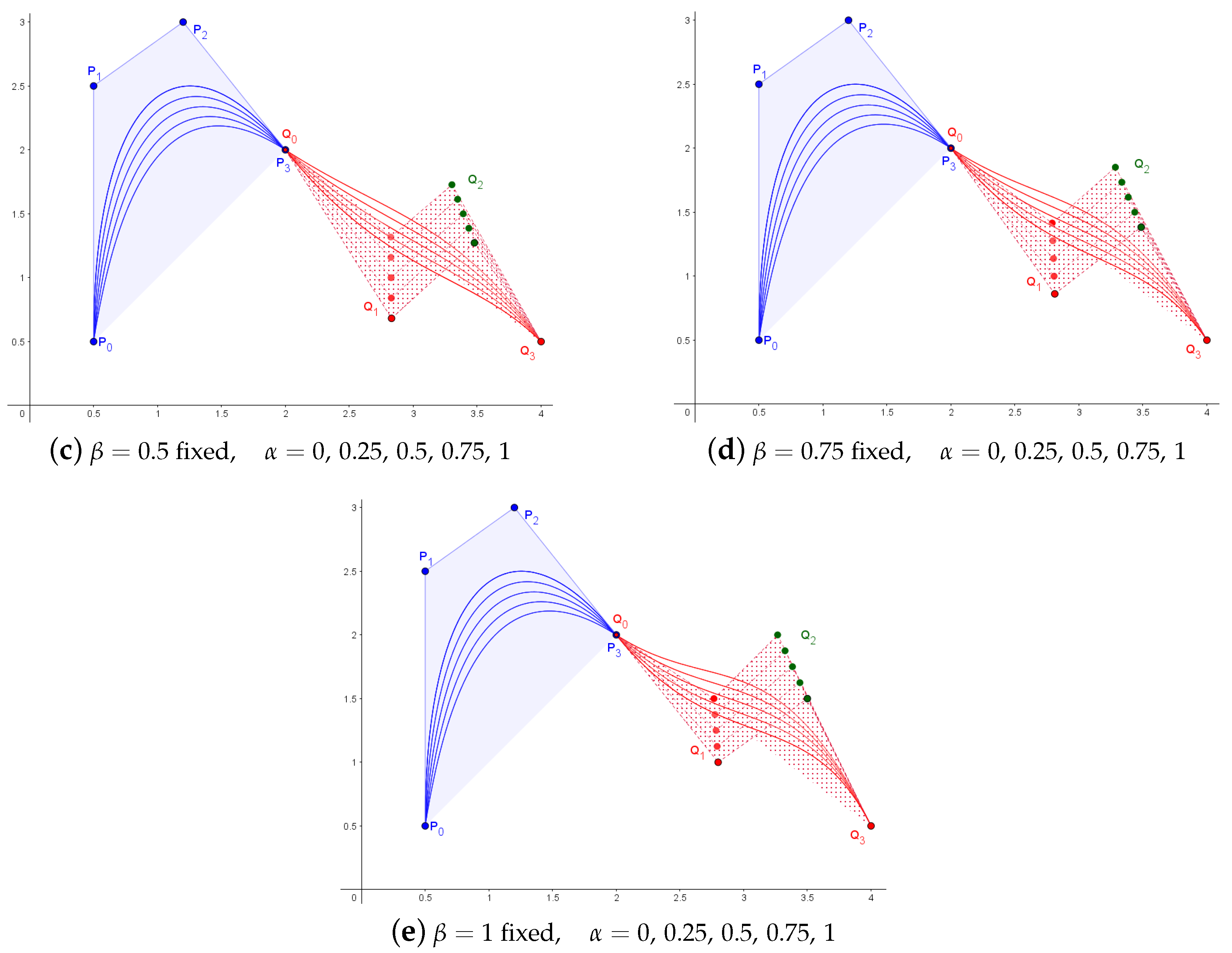
3.2. The Construction of -Bezier Curves
3.3. The Characteristics of -Bezier Curves
- Terminal properties: and , that is, the curve always starts at its first control point and ends at its last point, independent of the shape parameter .The result is followed by the end-point property of the -Bernstein operator.
- Convex hull: The -Bezier curve is a convex combination of the control points, that is, the curve lies within the convex hull of the control points .The result is followed by the non-negativity and the partition of the unity properties of the -Bernstein operator.
- Geometric invariance: The -Bezier curve is affine-independent, that is, the curve does not vary according to the change in coordinates no matter what the shape parameter is.The result is followed by the non-negativity and the partition of unity properties of the -Bernstein operator.
- Symmetry: The same -Bezier curve is obtained by re-indexing the control net from to .The result is followed by the symmetry property of the -Bernstein operator.
- Geometric properties at the end-points: The tangent line of the -degree -Bezier curve at its first control point lies in the plane spanned by the first three control points with the given relation as follows:and similarly, the tangent line at the curve’s last control point lies in the plane spanned by the last three control points with the following relation:where .Proof.By taking the derivative of (9) at and recalling the property of the derivatives at the corner points for the -Bernstein operator, we obtainwhich completes the proof. Analogous to this, the proof can be induced at . □
- Second-order derivatives at the end-points: The second derivative at the end-points of the -degree -Bezier curve is given by the following:where .Proof.The proof follows according to the relations given in (8). □
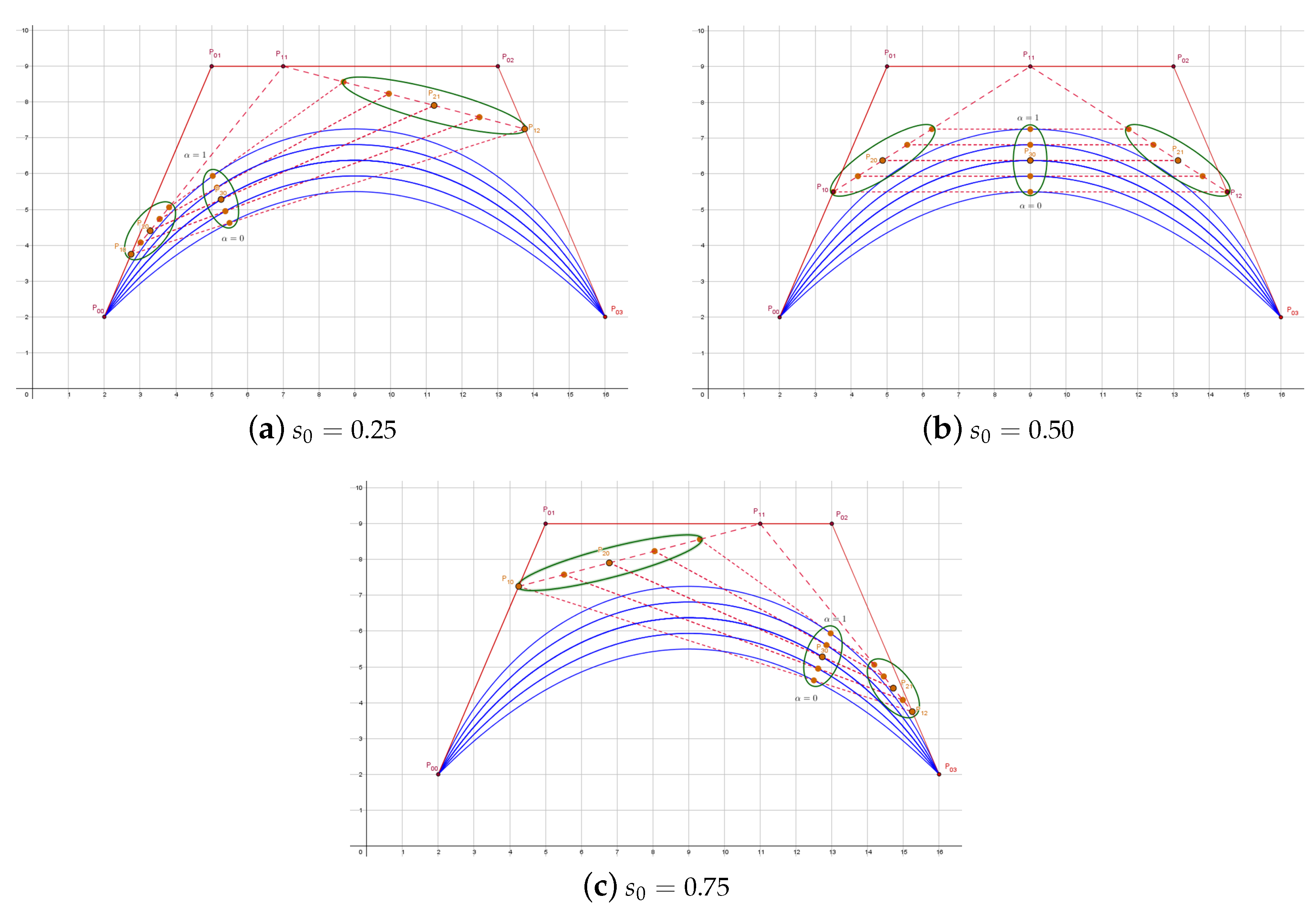
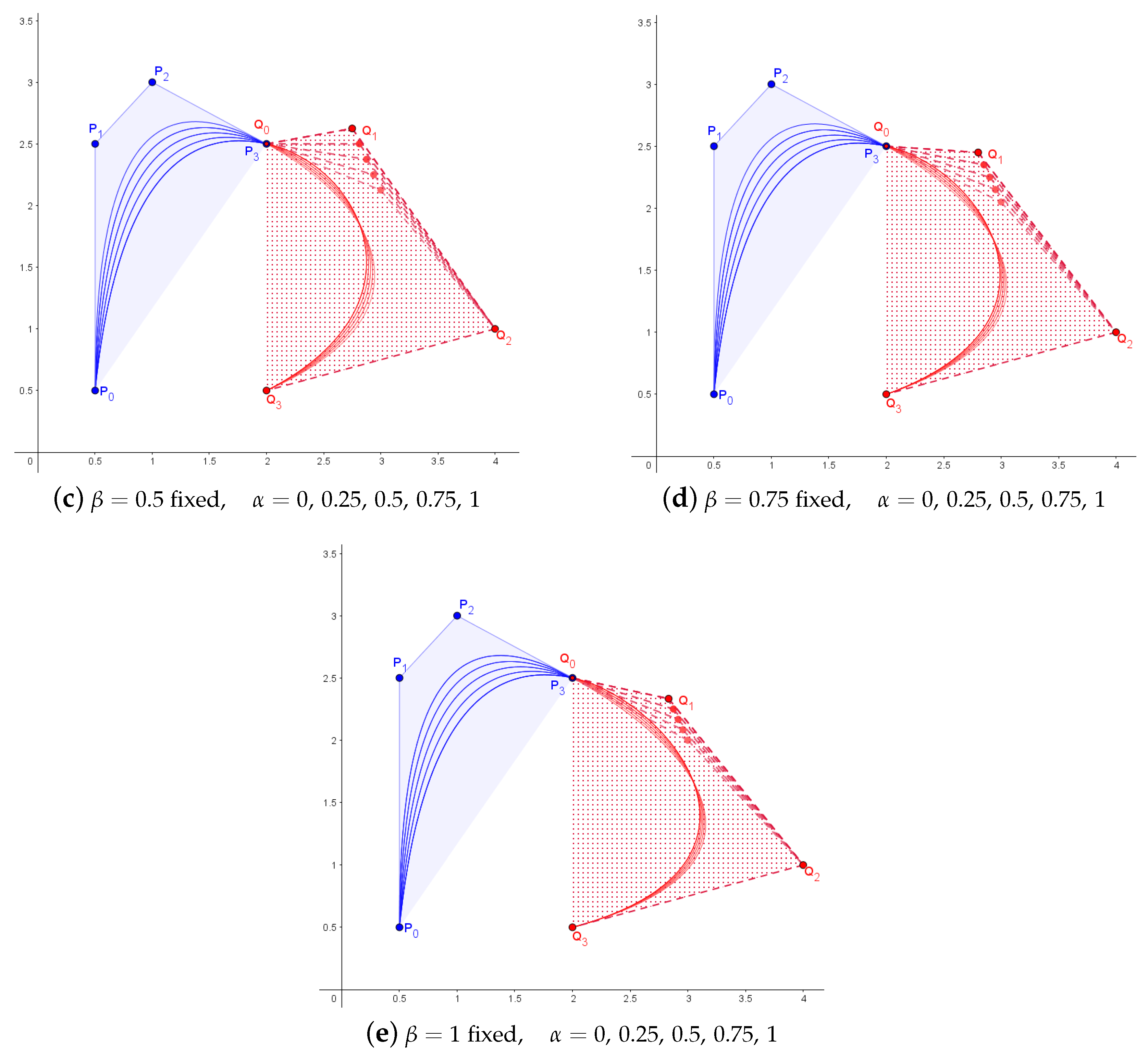
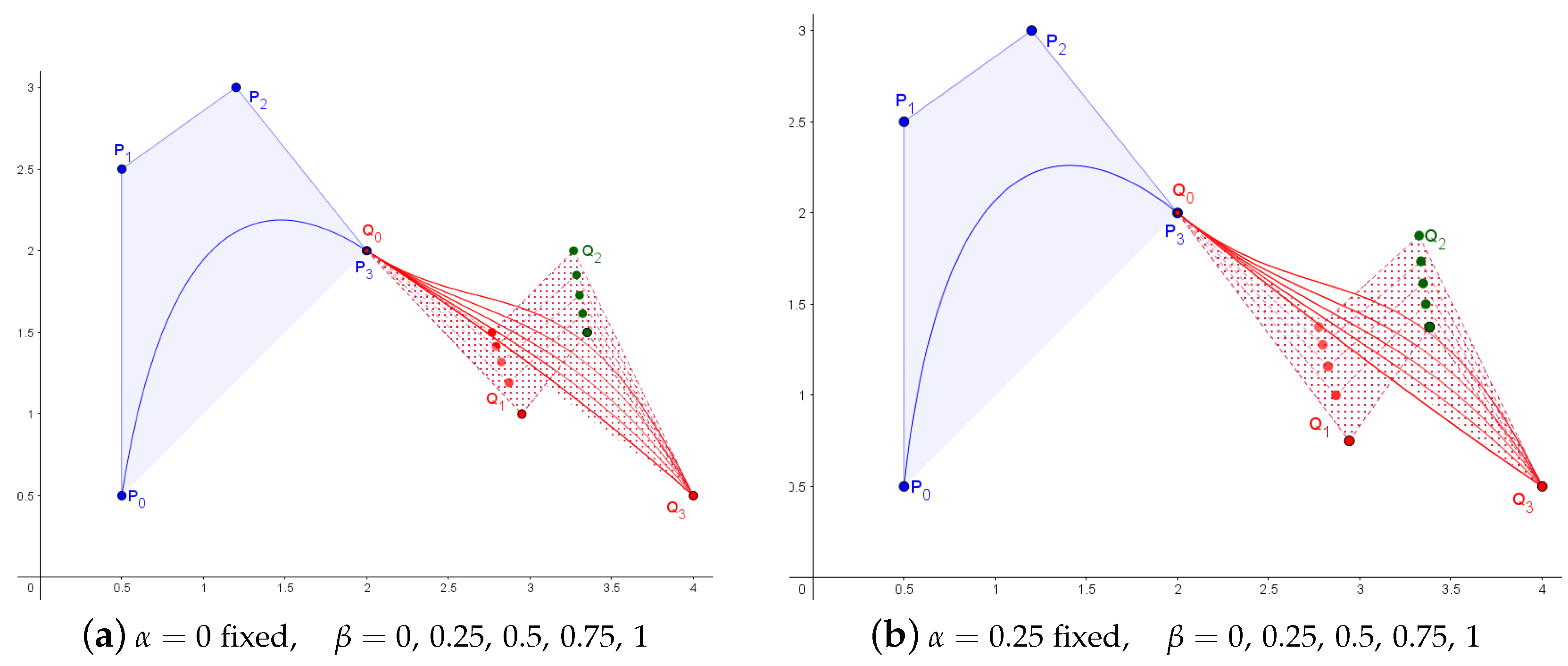
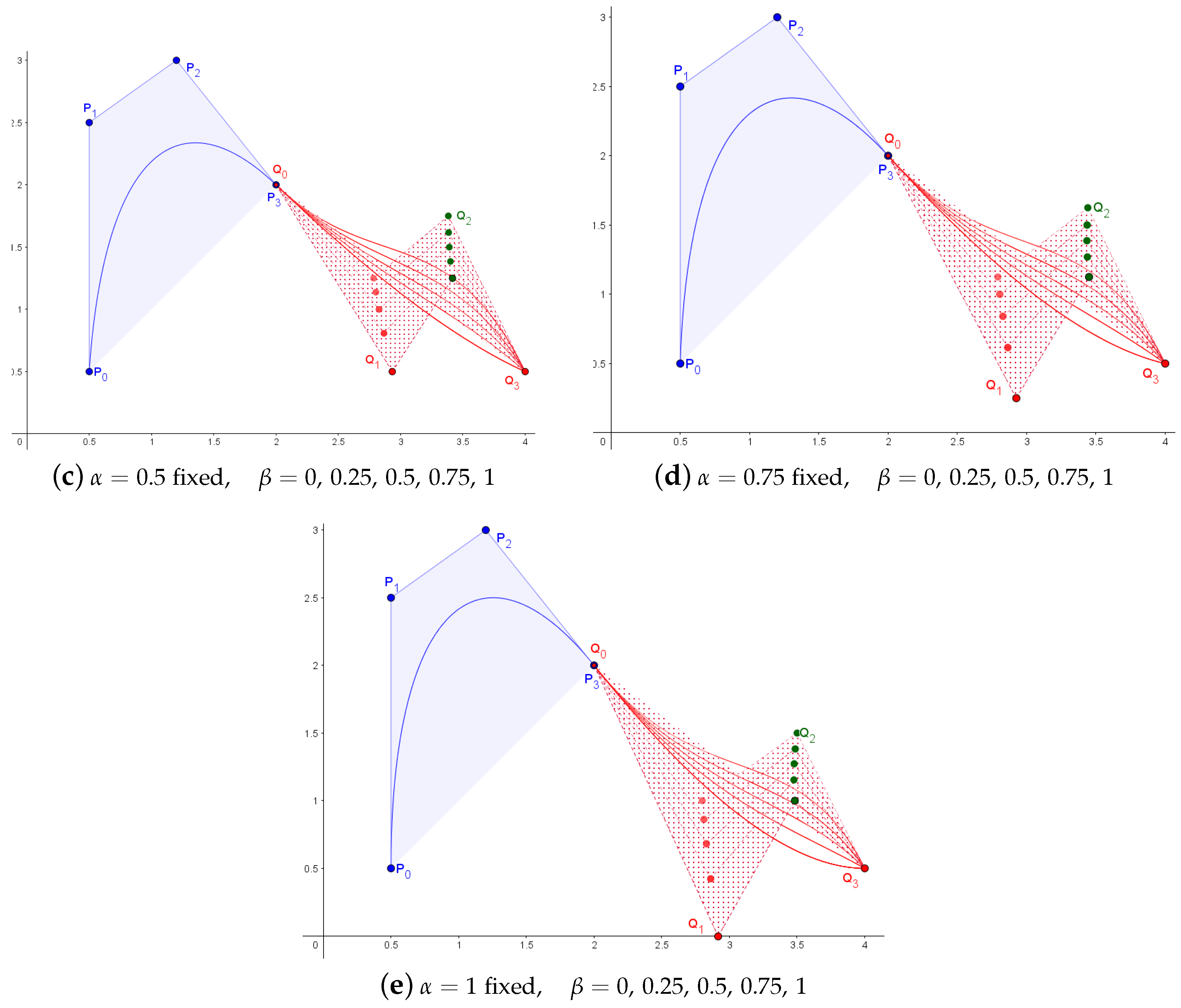
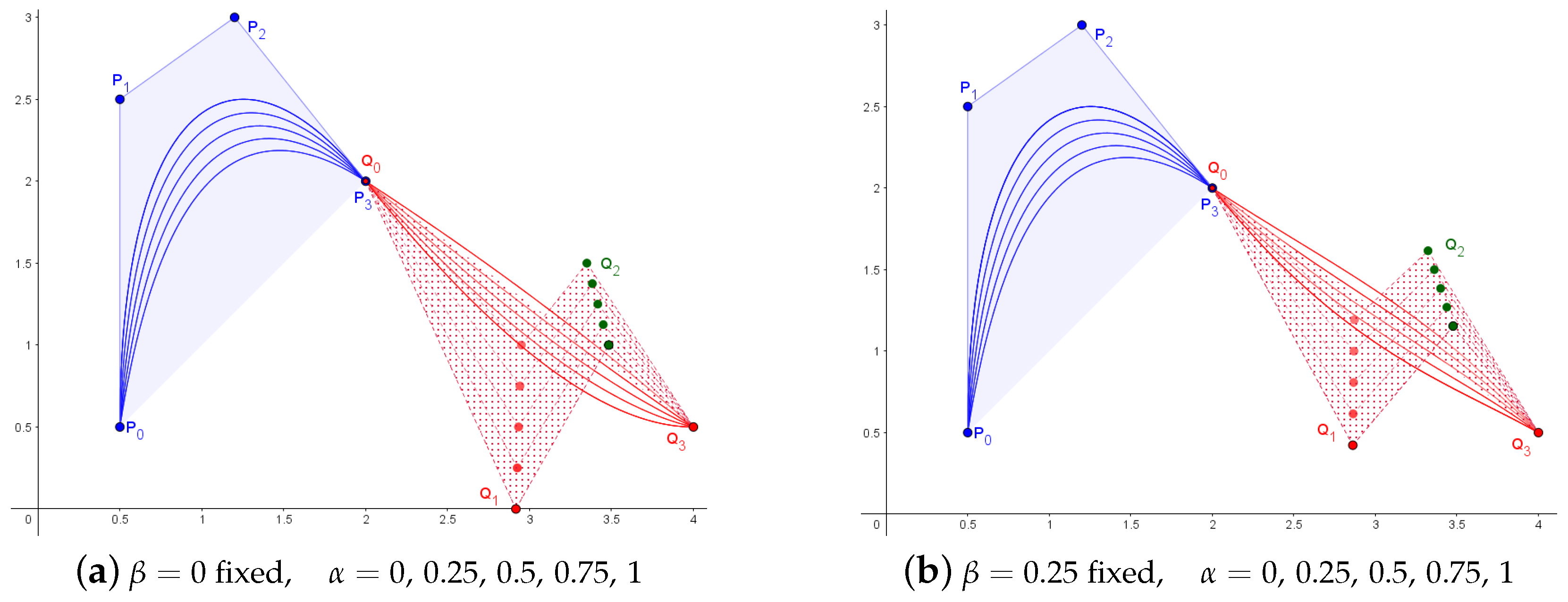
3.4. Subdivision of the -Bezier Curves

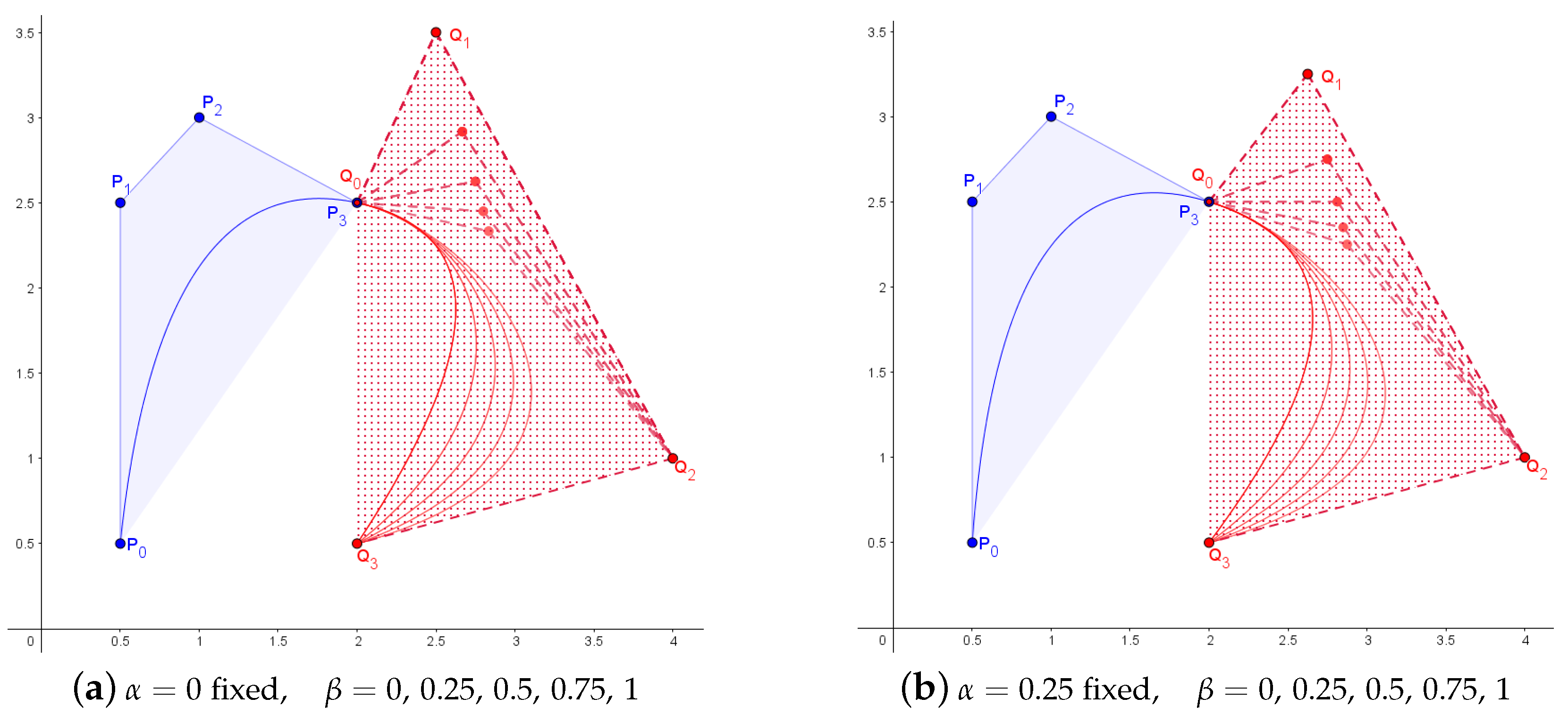
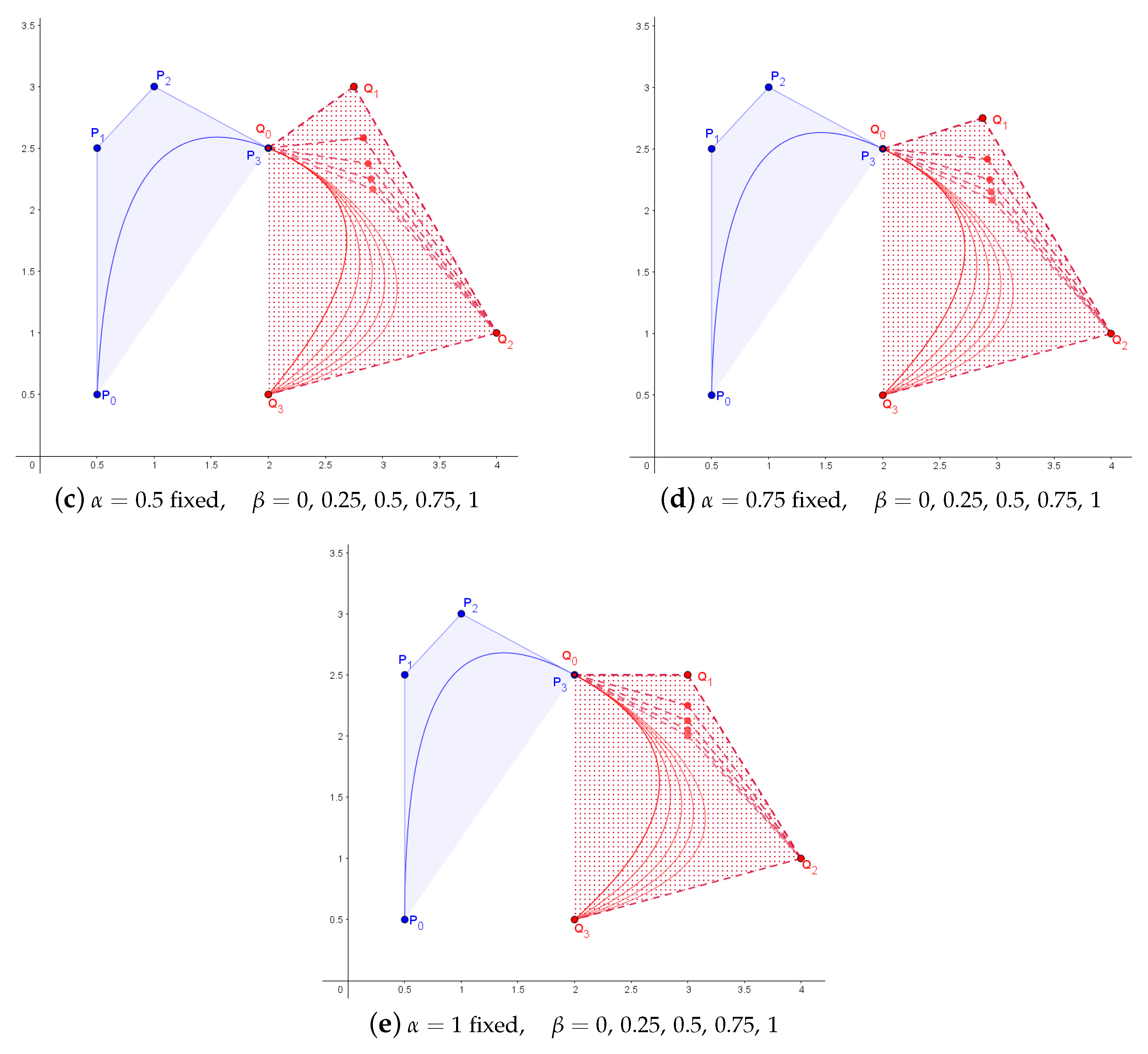
3.5. Parametric Continuity Conditions for -Bezier Curves
3.6. Cross-Sectional Design Surfaces with -Bezier Curves
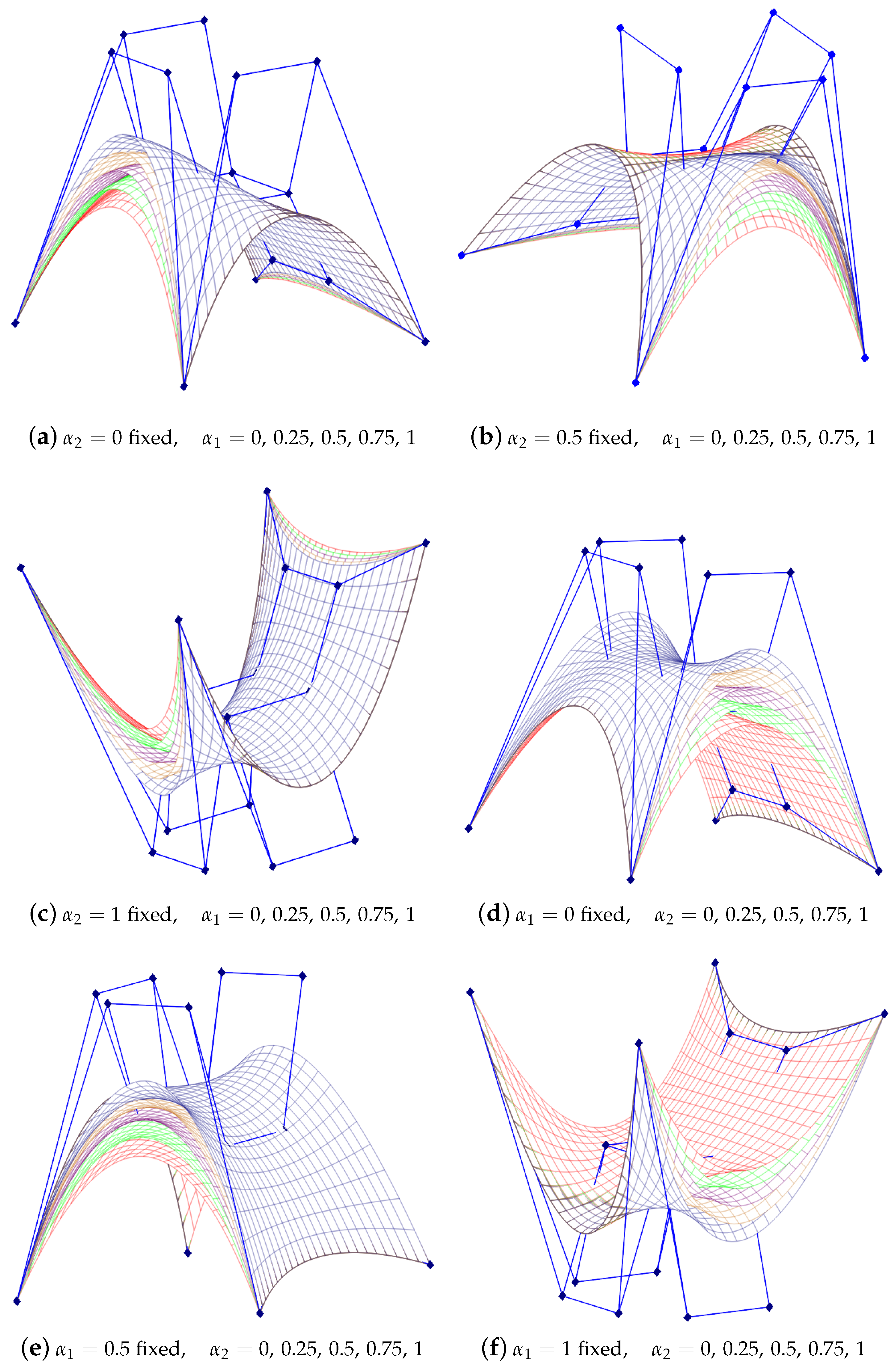
3.7. Tensor Product -Bezier Surfaces
3.8. Properties of -Bezier Surfaces
- Convex hull property: The -Bezier surface lies in the convex hull defined by its control net;
- Affine invariance Applying an affine transformation to an -Bezier surface is the same as the surface being constructed with the transformed control points;
- Isoparametric curves: Since the -Bezier surface is built using a tensor product, any isoparametric curves at a point on the surface result in a new -Bezier curve;
- Boundary curves: As special kinds of isoparametric curves, the four boundary curves of the -Bezier surface, by setting , , , and , correspond to -Bezier curves.
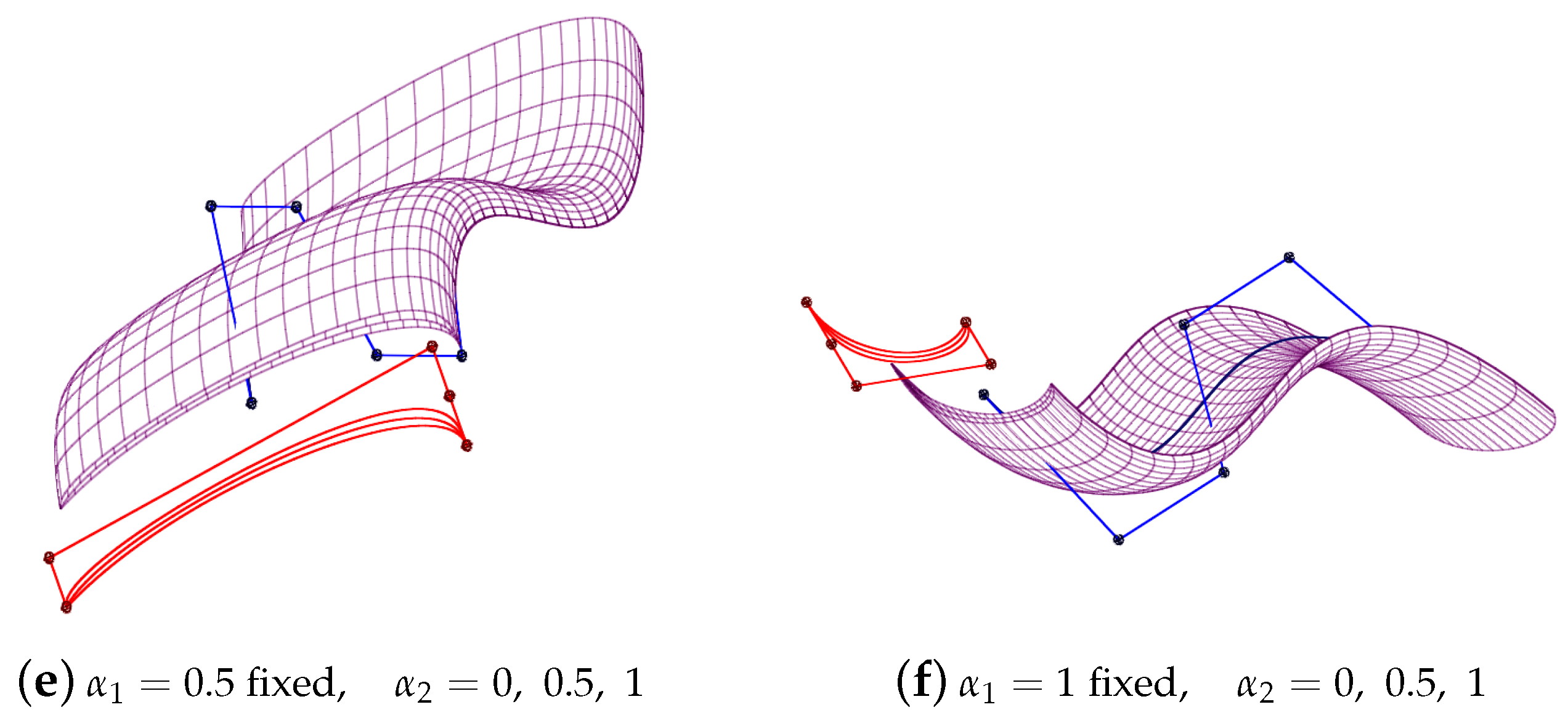
3.9. Ruled Surfaces Using -Bezier Curves
3.10. -Bezier Swung Surfaces
3.11. -Bezier Swept Surfaces
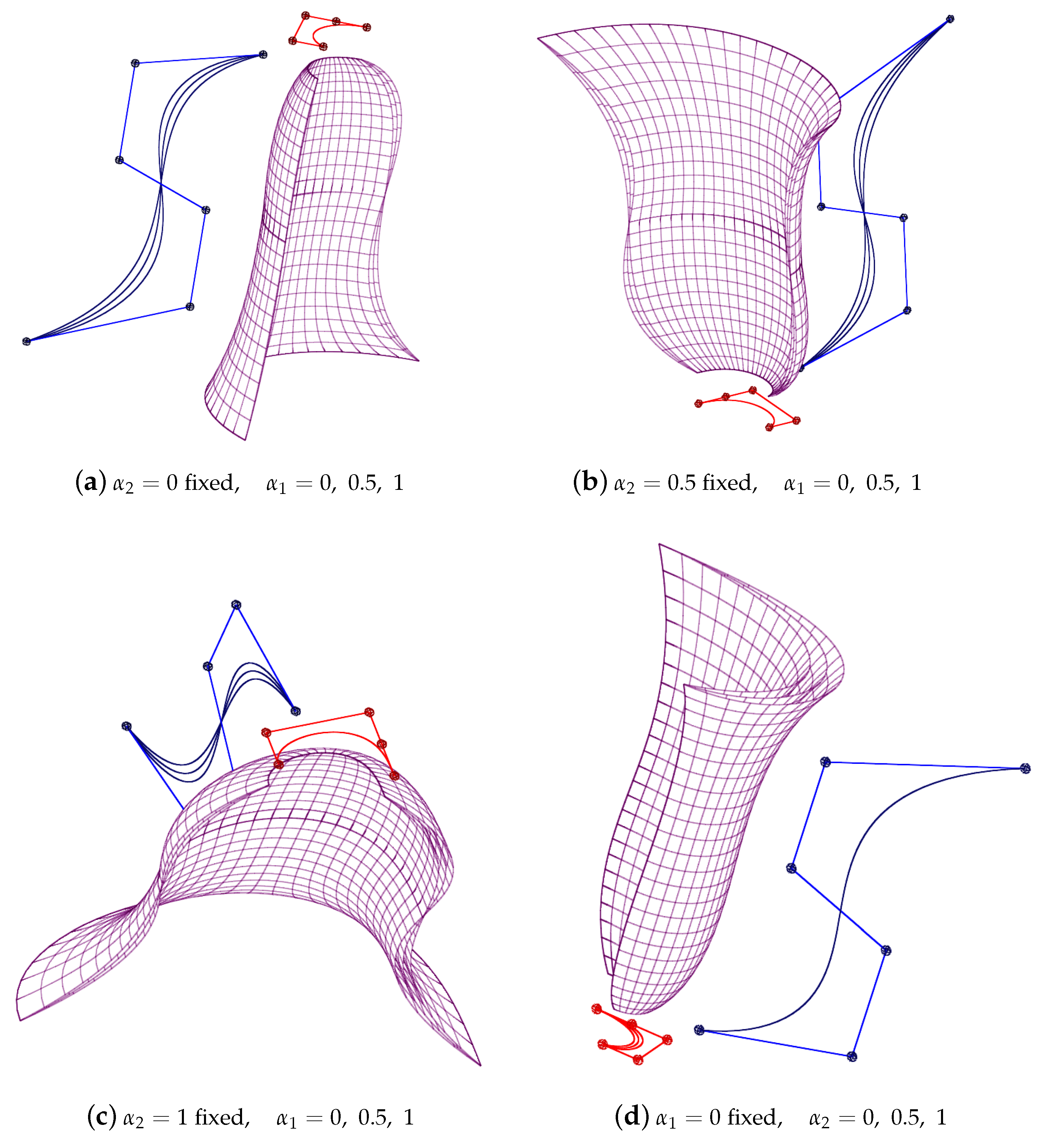
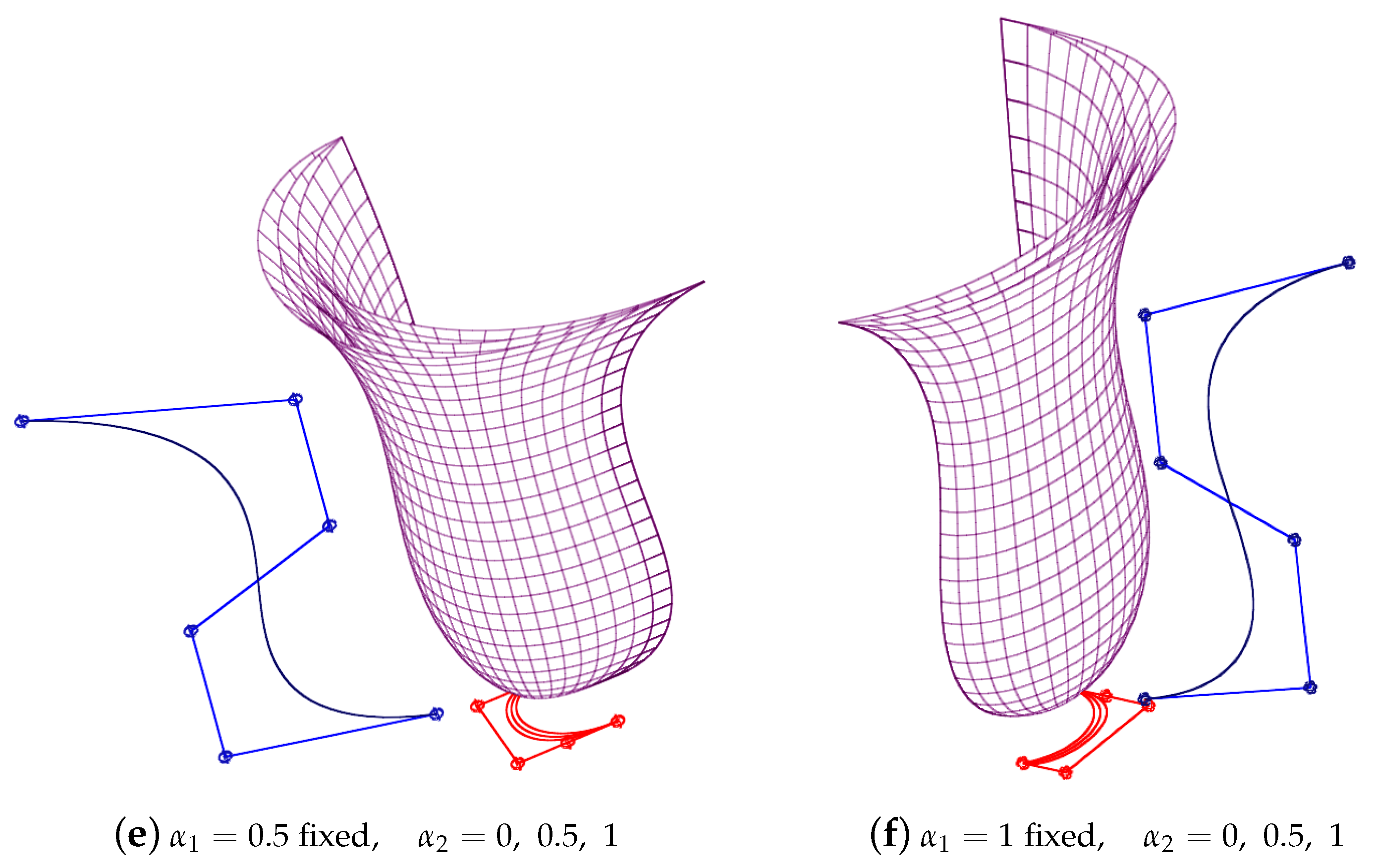
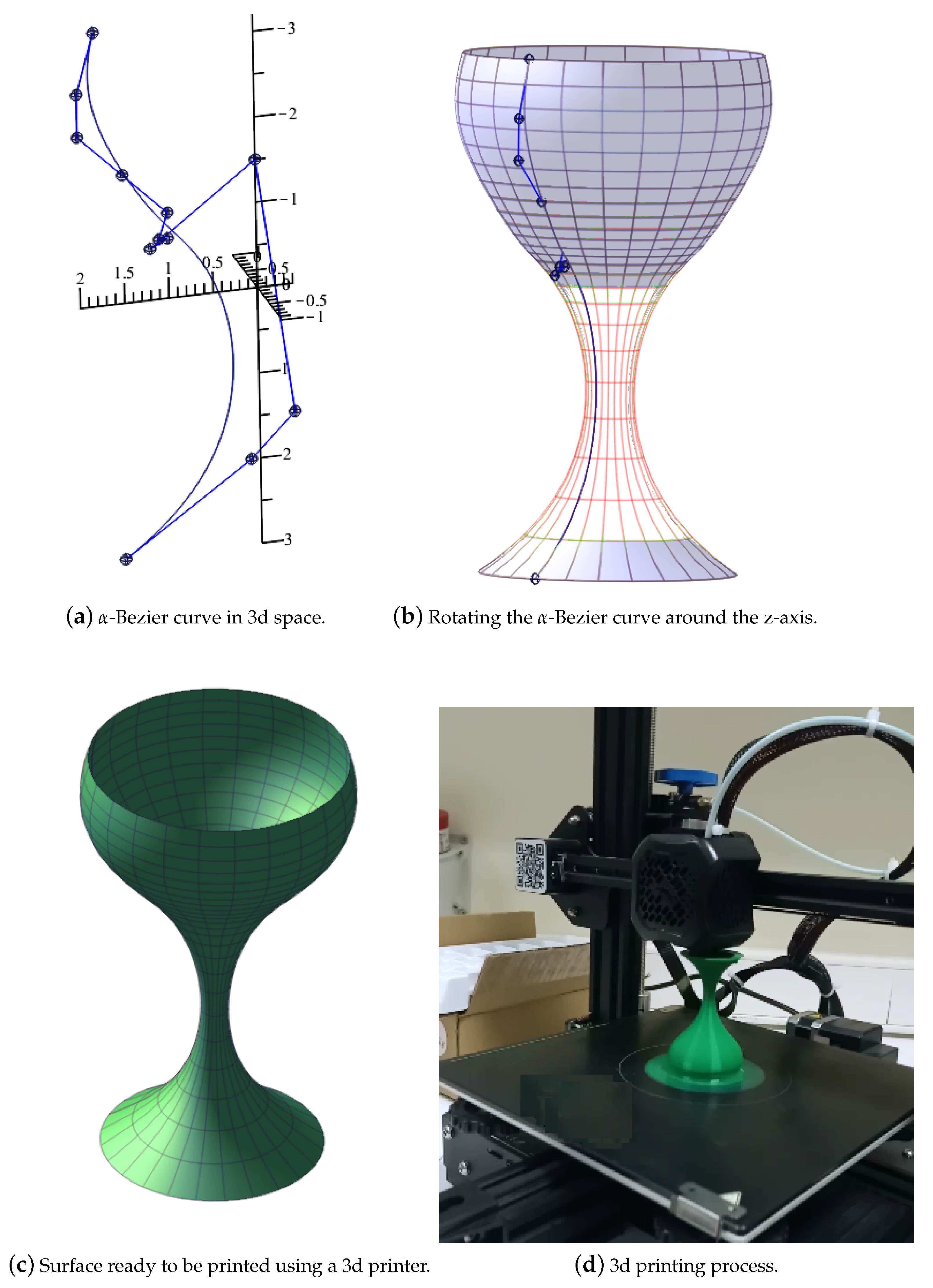
3.12. Rotational Surfaces Using -Bezier Curves
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Böhm, W.; Farin, G.; Kahmann, J. A survey of curve and surface methods in CAGD. Comput. Aided Geom. Des. 1984, 1, 1–60. [Google Scholar] [CrossRef]
- Farin, G. Curves and Surfaces for Computer-Aided Geometric Design: A Practical Guide; Elsevier: Amsterdam, The Netherlands, 2014. [Google Scholar]
- Li, C.; Zhu, C. Designing developable C-Bézier surface with shape parameters. Mathematics 2020, 8, 402. [Google Scholar] [CrossRef]
- Oruç, H.; Phillips, G.M. q-Bernstein polynomials and Bézier curves. J. Comput. Appl. Math. 2003, 151, 1–12. [Google Scholar] [CrossRef]
- Wang, W.; Wang, G. Bézier curves with shape parameter. J. Zhejiang Univ.-Sci. 2005, 6, 497–501. [Google Scholar]
- Ye, Z.; Long, X.; Zeng, X.M. Adjustment algorithms for Bézier curve and surface. In Proceedings of the 2010 5th International Conference on Computer Science & Education, Hefei, China, 24–27 August 2010; pp. 1712–1716. [Google Scholar]
- Yan, L.L.; Liang, J.F. An extension of the Bézier model. Appl. Math. Comput. 2011, 218, 2863–2879. [Google Scholar] [CrossRef]
- Qin, X.; Hu, G.; Zhang, N.; Shen, X.; Yang, Y. A novel extension to the polynomial basis functions describing Bézier curves and surfaces of degree n with multiple shape parameters. Appl. Math. Comput. 2013, 223, 1–16. [Google Scholar] [CrossRef]
- Cai, Q.B.; Zhou, G. Properties of (λ, q)-Bezier Curves and Surfaces. In Proceedings of the 2018 IEEE 4th International Conference on Computer and Communications (ICCC), Chengdu, China, 7–10 December 2018; pp. 2228–2232. [Google Scholar]
- Han, X.A.; Ma, Y.; Huang, X. A novel generalization of Bézier curve and surface. J. Comput. Appl. Math. 2008, 217, 180–193. [Google Scholar] [CrossRef]
- Zhang, J. C-curves: An extension of cubic curves. Comput. Aided Geom. Des. 1996, 13, 199–217. [Google Scholar] [CrossRef]
- Pottmann, H. The geometry of Tchebycheffian spines. Comput. Aided Geom. Des. 1993, 10, 181–210. [Google Scholar] [CrossRef]
- Chen, Q.; Wang, G. A class of Bézier-like curves. Comput. Aided Geom. Des. 2003, 20, 29–39. [Google Scholar] [CrossRef]
- Lü, Y.; Wang, G.; Yang, X. Uniform hyperbolic polynomial B-spline curves. Comput. Aided Geom. Des. 2002, 19, 379–393. [Google Scholar] [CrossRef]
- Zhu, Y.; Han, X. Curves and surfaces construction based on new basis with exponential functions. Acta Appl. Math. 2014, 129, 183–203. [Google Scholar] [CrossRef]
- Zhu, Y.; Liu, Z. A class of trigonometric Bernstein-type basis functions with four shape parameters. Math. Probl. Eng. 2019, 2019, 9026187. [Google Scholar] [CrossRef]
- Majeed, A.; Abbas, M.; Sittar, A.A.; Kamran, M.; Tahseen, S.; Emadifar, H. New Cubic Trigonometric Bezier-Like Functions with Shape Parameter: Curvature and Its Spiral Segment. J. Math. 2021, 2021, 6330649. [Google Scholar] [CrossRef]
- Yılmaz Ceylan, A. Construction of a new class of Bézier like curves. Math. Methods Appl. Sci. 2021, 44, 7659–7665. [Google Scholar] [CrossRef]
- Canlı, D.; Şenyurt, S. Bezier Like Curves by a New Basis with a Two Shape Parameters of Exponential Function. In Proceedings of the 10th International “Baskent” Congress On Physical, Engineering, and Applied Sciences, Ankara, Turkey, 28–30 October 2023; Proceedings Book. BZT Academy Pub. House: Istanbul, Türkiye, 2023; pp. 171–177. [Google Scholar]
- Canlı, D.; Şenyurt, S. A Logarithmic Basis with One-Shape Parameter To Construct Free Form Curves By Bezier Method. In Proceedings of the 5th International Acharaka Congress on Life Engineering and Applied Sciences, Izmir, Turkey, 11–13 November 2023; Proceedings Book. BZT Academy Pub. House: Istanbul, Türkiye, 2023; pp. 177–185. [Google Scholar]
- Canlı, D.; Şenyurt, S. Cubic Bezier-Like Curves with Two Shape Parameters Of Trigonometric Tangent Function. In Proceedings of the International Euroasia Congress on Scientific Researches and Recent Trends XII, Ankara, Türkiye, 29–30 November 2023; pp. 893–903. [Google Scholar]
- Fang, M.; Wang, G. w-Bézier. In Proceedings of the 10th IEEE International Conference on Computer-Aided Design and Computer Graphics, Chengdu, China, 18–21 August 2007; pp. 38–42. [Google Scholar]
- Constantini, P.; Lyche, T.; Manni, C. On a class of weak Tchebycheff systems. Numer. Math. 2005, 101, 333–354. [Google Scholar] [CrossRef]
- Schumaker, L. Spline Functions: Basic Theory; Cambridge University Press: Cambridge, UK, 2007. [Google Scholar]
- Chu, L.; Zeng, X.M. Constructing curves and triangular patches by Beta functions. J. Comput. Appl. Math. 2014, 260, 191–200. [Google Scholar] [CrossRef]
- Goldman, R.N. Pólya’s urn model and computer aided geometric design. SIAM J. Algebr. Discret. Methods 1985, 6, 1–28. [Google Scholar] [CrossRef]
- Cheng, F.; Kazadi, A.N.; Lin, A.J. Beta-Bezier Curves. Comput. Aided Des. Appl. 2021, 18, 1265–1278. [Google Scholar] [CrossRef]
- Levent, A.; Şahin, B. Beta Bezier Curves. Appl. Comput. Math. 2019, 18, 79–94. [Google Scholar]
- Cai, Q.B.; Lian, B.Y.; Zhou, G. Approximation properties of λ-Bernstein operators. J. Inequalities Appl. 2018, 2018, 61. [Google Scholar] [CrossRef] [PubMed]
- Kadak, U.; Özger, F. A numerical comparative study of generalized Bernstein-Kantorovich operators. Math. Found. Comput. 2021, 4, 311. [Google Scholar] [CrossRef]
- Chen, X.; Tan, J.; Liu, Z.; Xie, J. Approximation of functions by a new family of generalized Bernstein operators. J. Math. Anal. Appl. 2017, 450, 244–261. [Google Scholar] [CrossRef]
- Farouki, R.T. The Bernstein polynomial basis: A centennial retrospective. Comput. Aided Geom. Des. 2012, 29, 379–419. [Google Scholar] [CrossRef]
- Hu, G.; Wu, J.; Qin, X. A novel extension of the Bézier model and its applications to surface modeling. Adv. Eng. Softw. 2018, 125, 27–54. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhou, Y.; Lowther, J.L.; Shene, C.K. Cross-sectional design: A tool for computer graphics and computer-aided design courses. In FIE’99 Frontiers in Education. 29th Annual Frontiers in Education Conference. Designing the Future of Science and Engineering Education. Conference Proceedings (IEEE Cat. No. 99CH37011), San Juan, PR, USA, 10–13 November 1999; IEEE: Piscataway, NJ, USA, 1999; Volume 2, p. 12B3-1. [Google Scholar]
- Canlı, D. The Geometry of Bezier Curves and Surfaces in Three-Dimensional Euclidean Space. Ph.D. Dissertation, Ordu University, Ordu, Türkiye, 2024. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Free-Form Geometric Design | Blending (/Basis) Functions | ||
|---|---|---|---|
| 1 | well-defined | ⇔ | |
| 2 | convex hull | ⇔ | |
| 3 | smooth | ⇔ | differentiable |
| 4 | interpolate end-points | ⇔ | ve |
| 5 | surface design | ⇔ | the product possesses 1, 2, 3, and 4 |
| 6 | symmetry | ⇔ | |
| 7 | construction algorithm | ⇐ | |
| 8 | non-degenerate | ⇔ | linearly independent |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Canlı, D.; Şenyurt, S. Bezier Curves and Surfaces with the Generalized α-Bernstein Operator. Symmetry 2025, 17, 187. https://doi.org/10.3390/sym17020187
Canlı D, Şenyurt S. Bezier Curves and Surfaces with the Generalized α-Bernstein Operator. Symmetry. 2025; 17(2):187. https://doi.org/10.3390/sym17020187
Chicago/Turabian StyleCanlı, Davut, and Süleyman Şenyurt. 2025. "Bezier Curves and Surfaces with the Generalized α-Bernstein Operator" Symmetry 17, no. 2: 187. https://doi.org/10.3390/sym17020187
APA StyleCanlı, D., & Şenyurt, S. (2025). Bezier Curves and Surfaces with the Generalized α-Bernstein Operator. Symmetry, 17(2), 187. https://doi.org/10.3390/sym17020187