
Bertrand Offsets of Slant Ruled Surfaces in Euclidean 3-Space


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. Basic Concepts
3. Bertrand Offsets of Slant Ruled Surfaces
3.1. Height Functions
- (a)
- The osculating circle of is displayed bywhich are indicated based on the condition that the osculating circle must have a touch of at least the third order at if .
- (b)
- The curve and the osculating circle have a touch of at least the fourth order at if , and .
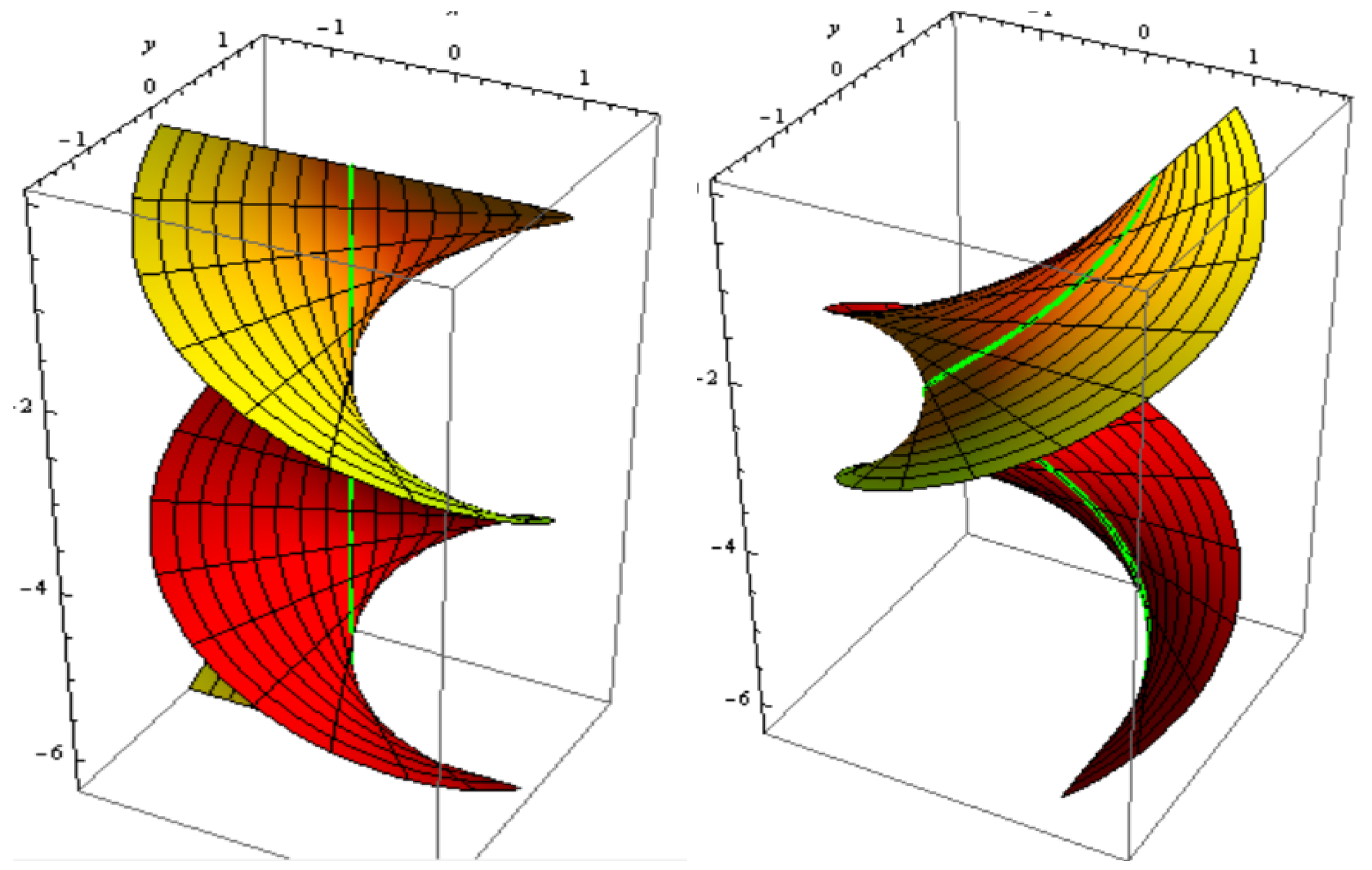
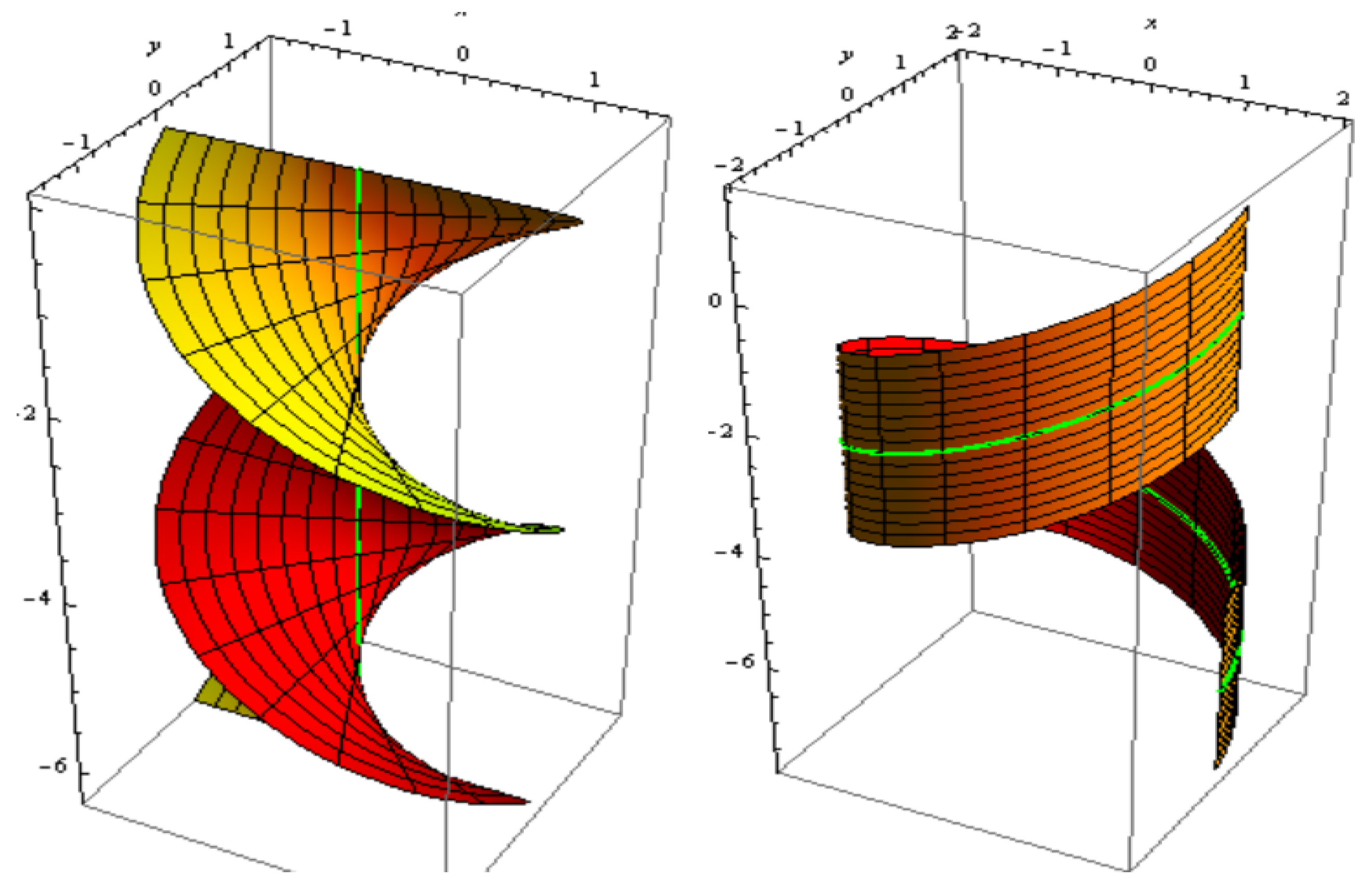
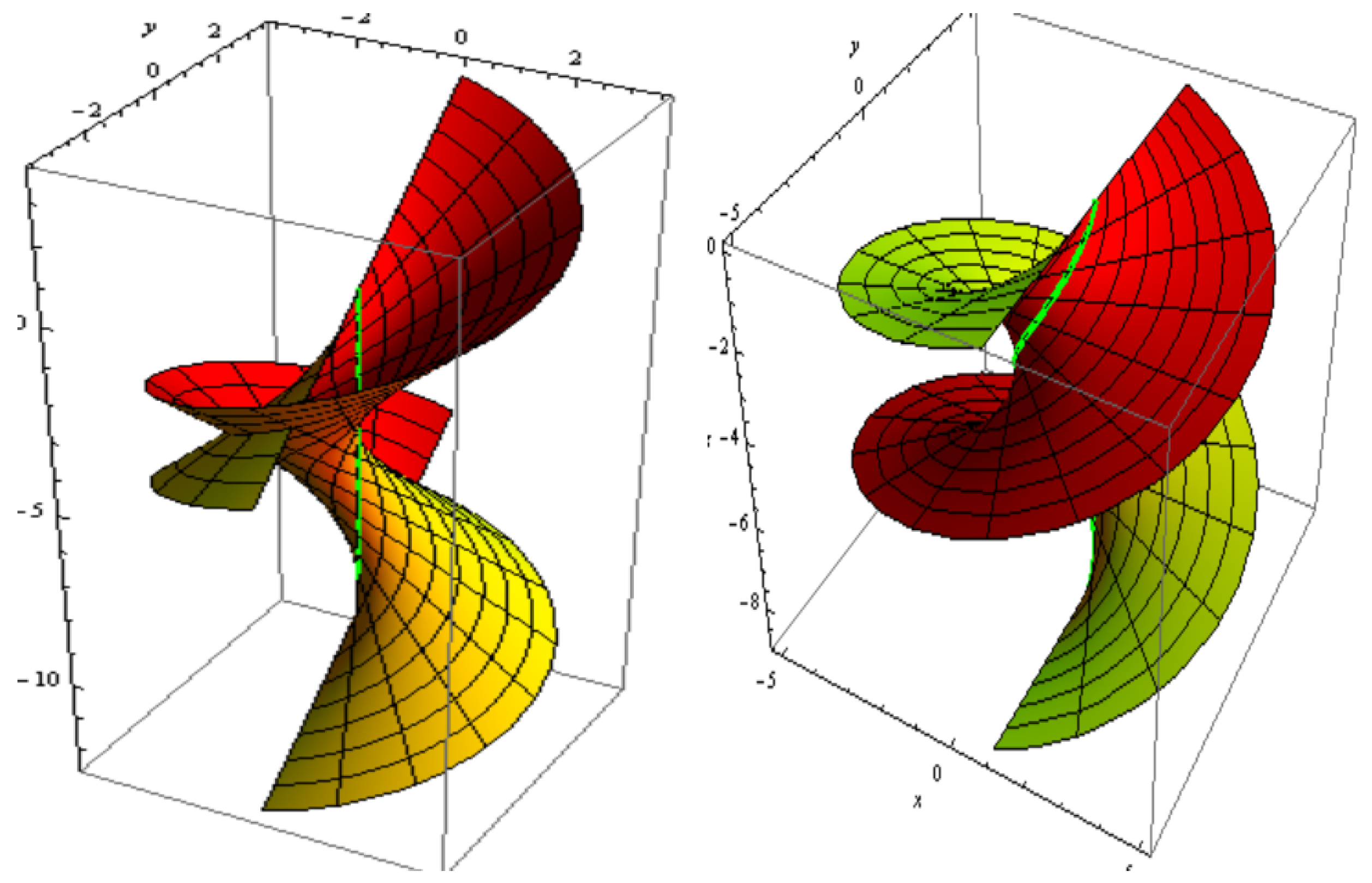
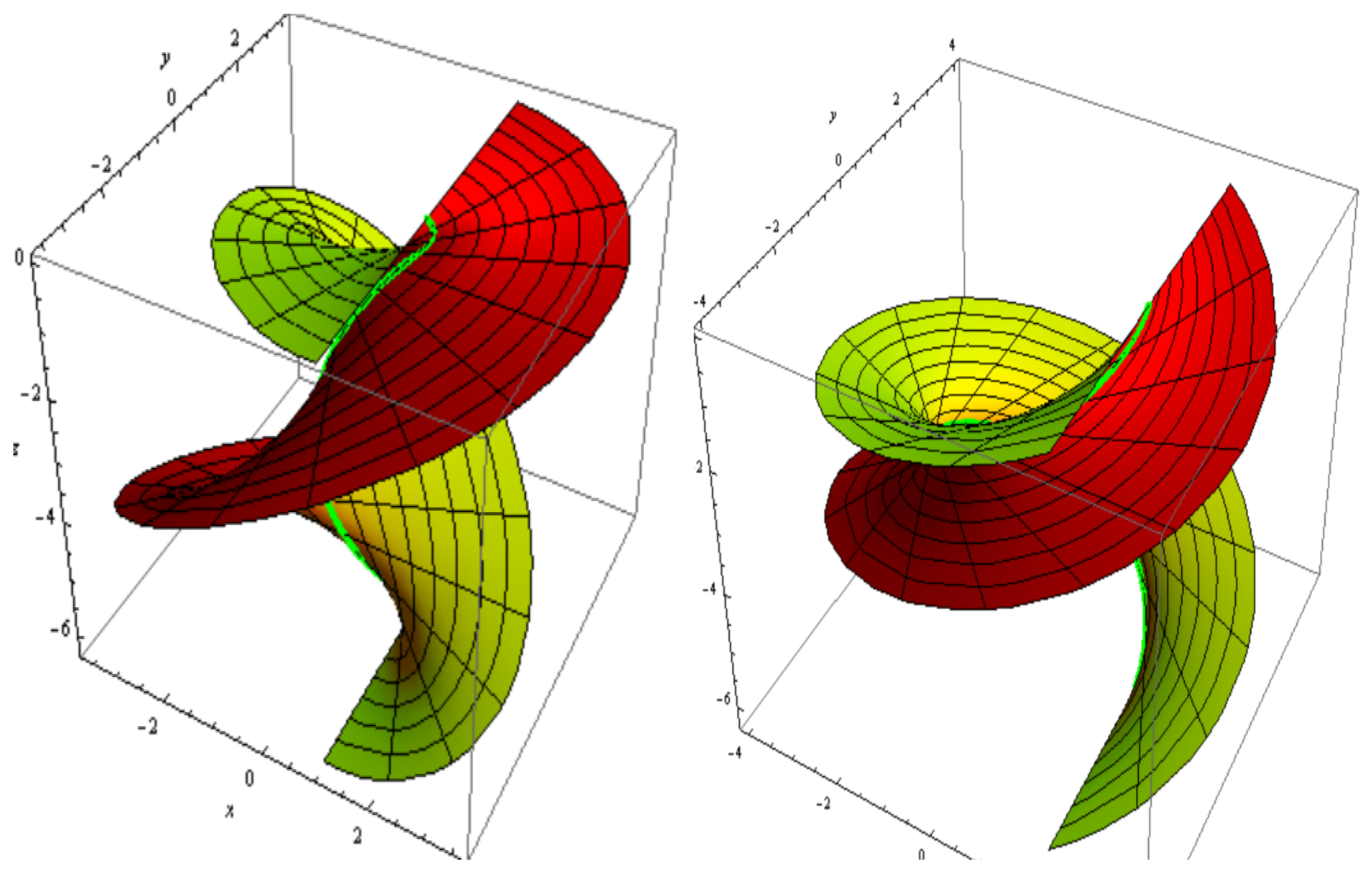
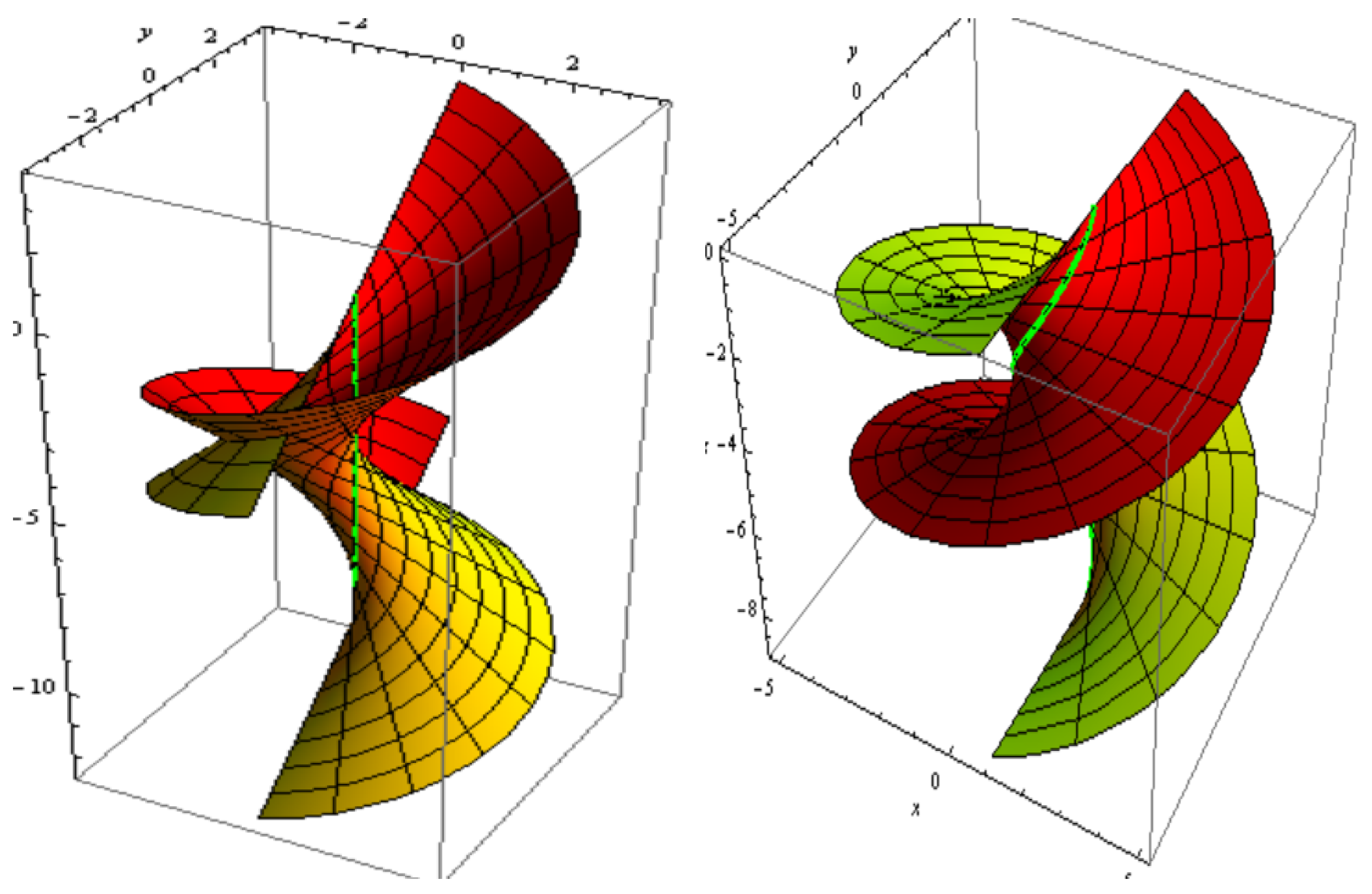
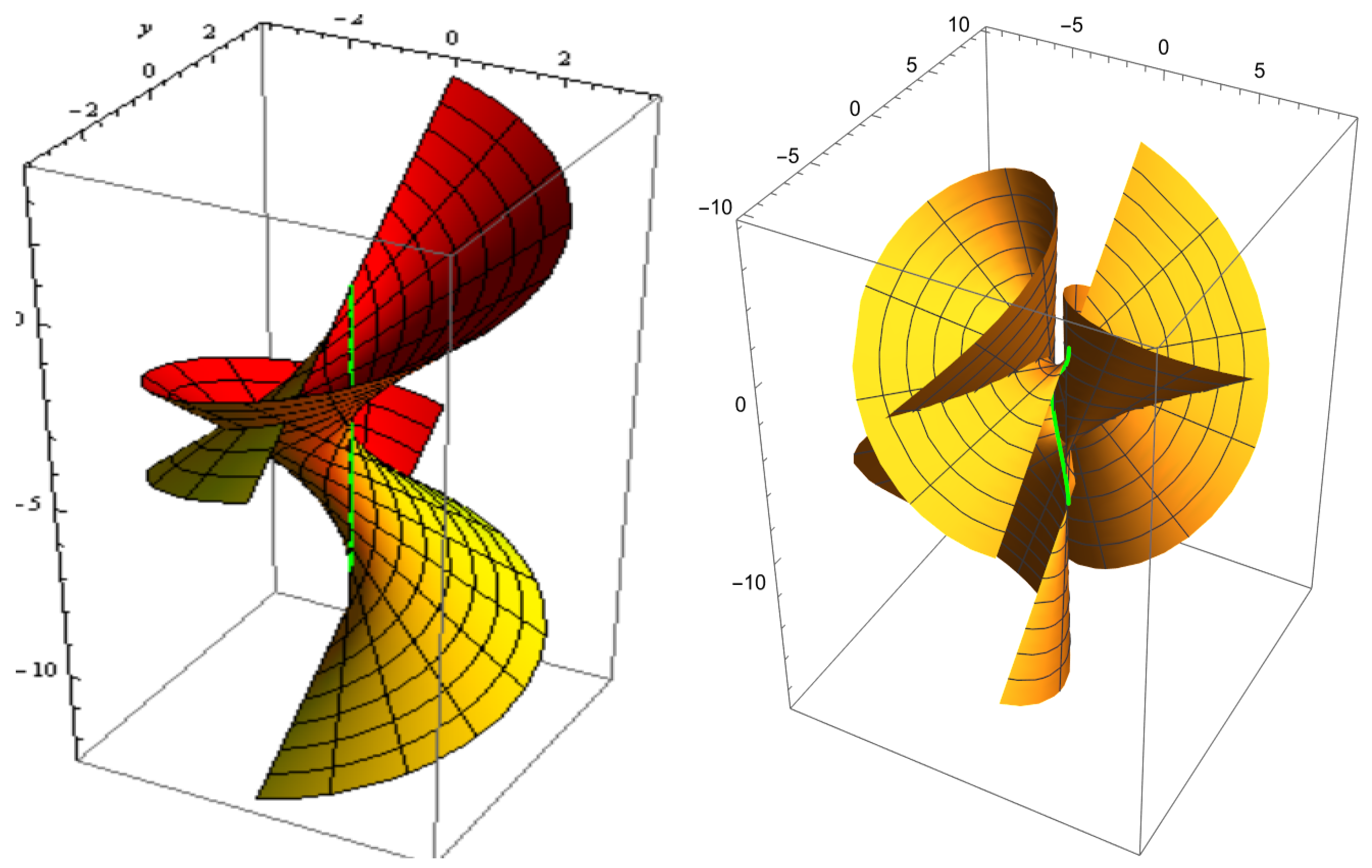
3.2. Construction of Slant Ruled Surface and Its
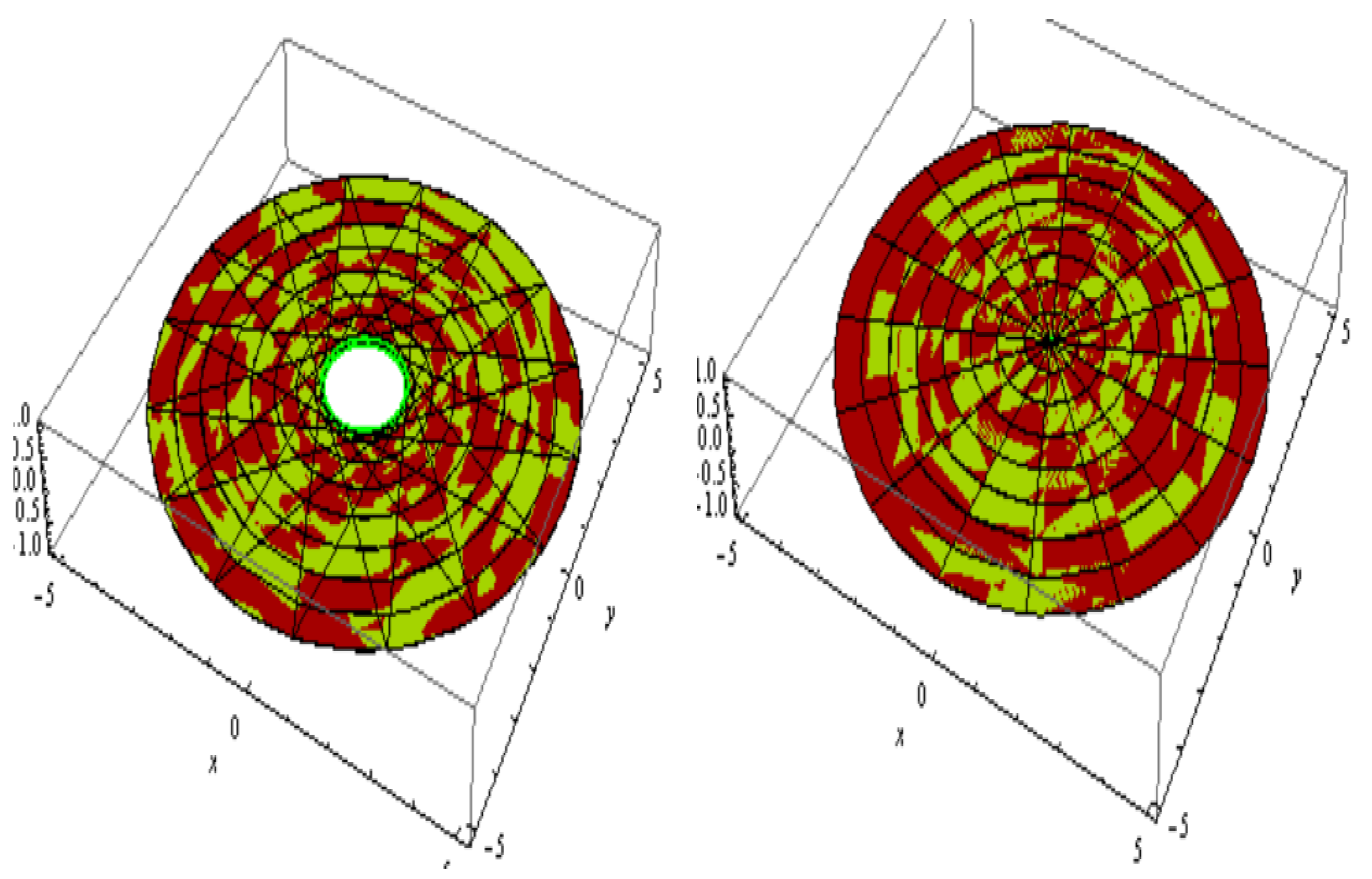
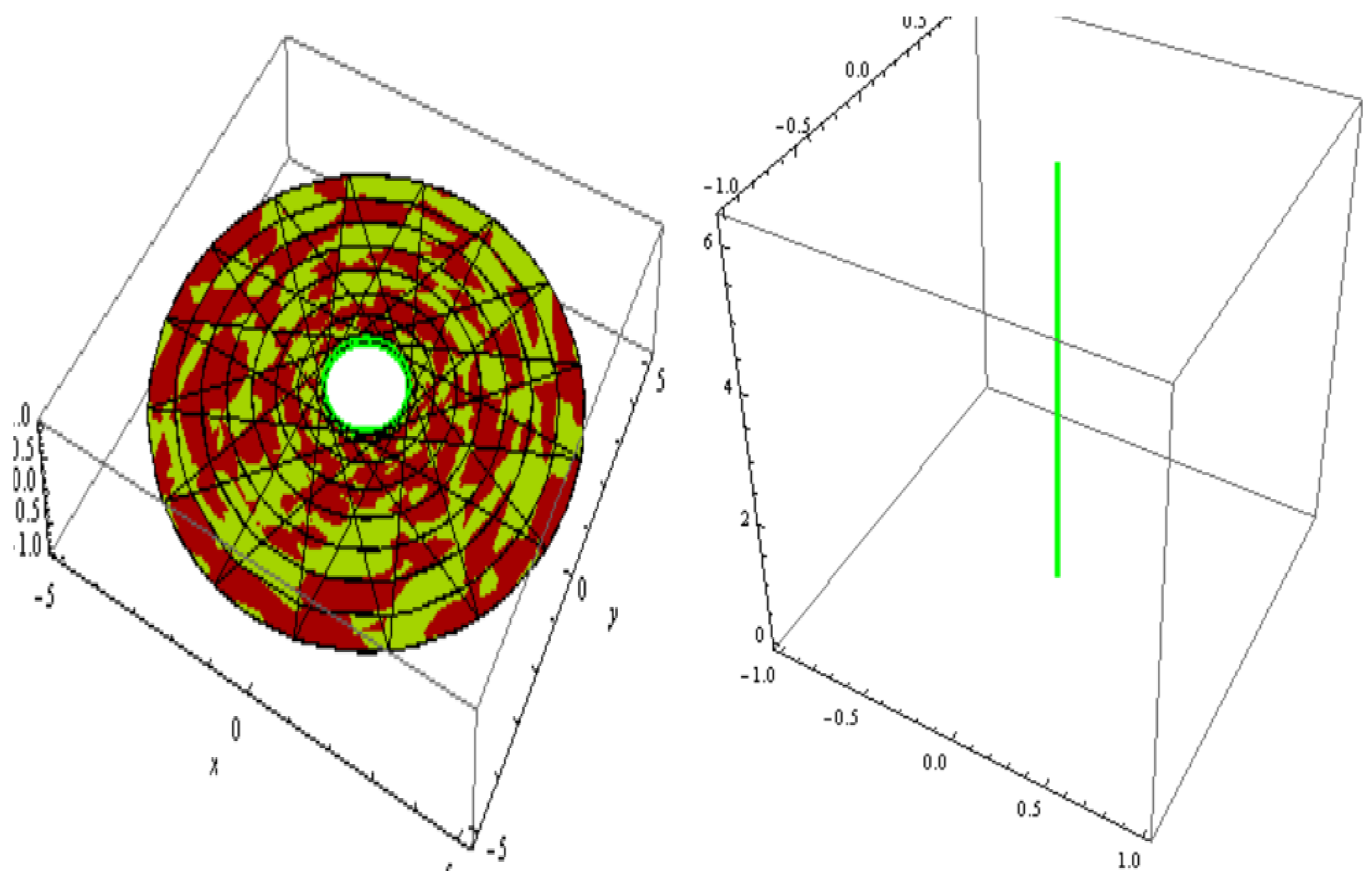
3.3. Classification of the Slant Ruled Surfaces
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gugenheimer, H.W. Differential Geometry; Graw-Hill: New York, NY, USA, 1956; pp. 162–169. [Google Scholar]
- Bottema, O.; Roth, B. Theoretical Kinematics; North-Holland Press: New York, NY, USA, 1979. [Google Scholar]
- Karger, A.; Novak, J. Space Kinematics and Lie Groups; Gordon and Breach Science Publishers: New York, NY, USA, 1985. [Google Scholar]
- Papaionnou, S.G.; Kiritsis, D. An application of Bertrand curves and surfaces to CAD/CAM. Comput. Aided Des. 1985, 17, 348–352. [Google Scholar] [CrossRef]
- Schaaf, J.A. Geometric Continuity of Ruled Surfaces. Comput. Aided Geom. Des. 1998, 15, 289–310. [Google Scholar] [CrossRef]
- Peternell, M.; Pottmann, H.; Ravani, B. On the computational geometry of ruled surfaces. Comput.-Aided Des. 1999, 31, 17–32. [Google Scholar] [CrossRef]
- Pottman, H.; Wallner, J. Computational Line Geometry; Springer: Berlin/Heidelberg, Germany, 2001. [Google Scholar]
- Ravani, B.; Ku, T.S. Bertrand offsets of ruled and developable surfaces. Comput. Aided Des. 1991, 23, 145–152. [Google Scholar] [CrossRef]
- Küçük, A.; Gürsoy, O. On the invariants of Bertrand trajectory surface offsets. AMC 2003, 11–23. [Google Scholar] [CrossRef]
- Kasap, E.; Kuruoglu, N. Integral invariants of the pairs of the Bertrand ruled surface. Bull. Pure Appl. Sci. Sect. E Math. 2002, 21, 37–44. [Google Scholar]
- Kasap, E.; Kuruoglu, N. The Bertrand offsets of ruled surfaces in . Acta Math. Vietnam. 2006, 31, 39–48. [Google Scholar]
- Kasap, E.; Yuce, S.; Kuruoglu, N. The involute×-evolute offsets of ruled surfaces. Iran. J. Sci. Tech. Trans. A 2009, 33, 195–201. [Google Scholar]
- Orbay, K.; Kasap, E.; Aydemir, I. Mannheim offsets of ruled surfaces. Math Probl. Eng. 2009, 2019, 160917. [Google Scholar] [CrossRef]
- Onder, M.; Ugurlu, H.H. Frenet frames and invariants of timelike ruled surfaces. Ain. Shams Eng. J 2013, 4, 507–513. [Google Scholar] [CrossRef]
- Sentrk, G.Y.; Yuce, S. Properties of integral invariants of the involute-evolute offsets of ruled surfaces. Int. J. Pure Appl. Math. 2015, 102, 757–768. [Google Scholar] [CrossRef]
- Yoon, D.W. On the evolute offsets of ruled surfaces in Minkowski 3-space. Turk. J. Math. 2016, 40, 594–604. [Google Scholar] [CrossRef]
- Onder, M. Non-Null slant ruled surfaces. Aims Math. 2019, 4, 384–396. [Google Scholar] [CrossRef]
- Onder, M.; Kaya, O. Characterizations of slant ruled surfaces in the Euclidean 3-space. Casp. J. Math. Sci. 2017, 6, 31–46. [Google Scholar]
- Aldossary, M.T.; Abdel-Baky, R.A. On the Blaschke approach of Bertrand offsets of spacelike ruled surfaces. AIMS Math. 2022, 6, 3339–3351. [Google Scholar] [CrossRef]
- Alluhaibi, N.; Abdel-Baky, R.A.; Naghi, M. On the Bertrand Offsets of Timelike Ruled Surfaces in Minkowski 3-Space. Symmetry 2022, 4, 673. [Google Scholar] [CrossRef]
- Nazra, S.; Abdel-Baky, R.A. Bertrand offsets of ruled surfaces with Blaschke frame in Euclidean 3-space. Axioms 2023, 12, 649. [Google Scholar] [CrossRef]
- Mofarreh, F.; Abdel-Baky, R.A. Surface pencil pair interpolating Bertrand pair as common asymptotic curves in Euclidean 3-space. Mathematics 2023, 11, 3495. [Google Scholar] [CrossRef]
- Şentürk, G.Y.; Salim, Y. Bertrand offsets of ruled surfaces with Darboux frame. Results Math. 2016, 72, 1151–1159. [Google Scholar] [CrossRef]
- Şentürk, G.Y.; Salim, Y. On the evolute offsets of ruled surfaces using the Darboux frame. Commun. Fac. Sci. Univ. Ank. Ser. A1 Math. Stat. 2019, 68, 1256–1264. [Google Scholar] [CrossRef]
- Bruce, J.W.; Giblin, P.J. Curves and Singularities, 2nd ed.; Cambridge University Press: Cambridge, UK, 1992. [Google Scholar]
- Almoneef, A.; Abdel-Baky, R.A. Singularity properties of spacelike circular surfaces. Symmetry 2023, 15, 842. [Google Scholar] [CrossRef]
- Nazra, S.; Abdel-Baky, R.A. Singularities of non-lightlike developable surfaces in Minkowski 3-space. Mediterr. J. Math. 2023, 20, 45. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Almoneef, A.A.; Abdel-Baky, R.A. Bertrand Offsets of Slant Ruled Surfaces in Euclidean 3-Space. Symmetry 2024, 16, 235. https://doi.org/10.3390/sym16020235
Almoneef AA, Abdel-Baky RA. Bertrand Offsets of Slant Ruled Surfaces in Euclidean 3-Space. Symmetry. 2024; 16(2):235. https://doi.org/10.3390/sym16020235
Chicago/Turabian StyleAlmoneef, Areej A., and Rashad A. Abdel-Baky. 2024. "Bertrand Offsets of Slant Ruled Surfaces in Euclidean 3-Space" Symmetry 16, no. 2: 235. https://doi.org/10.3390/sym16020235
APA StyleAlmoneef, A. A., & Abdel-Baky, R. A. (2024). Bertrand Offsets of Slant Ruled Surfaces in Euclidean 3-Space. Symmetry, 16(2), 235. https://doi.org/10.3390/sym16020235