Finite Time Stability Analysis and Feedback Control for Takagi–Sugeno Fuzzy Time Delay Fractional-Order Systems


Abstract
1. Introduction
- Takagi–Sugeno fuzzy modeling is extensively employed for approximating nonlinear dynamics, including FOS. Recent papers have extended the modeling approach of FOS to include time-varying delay using the CFD. However, there are no studies dealing with the combination of CTFD and delayed Takagi–Sugeno fuzzy models in the literature. This work presents the first investigation of the class of delayed Takagi–Sugeno fuzzy models with a tempered derivative.
- This paper investigates the finite time stability problem of Takagi–Sugeno fuzzy TDFOS with CTFD. This problem is more challenging than the asymptotic stability problem for two reasons. Firstly, finite time stability is sensitive to initial conditions. Indeed, the stability is guaranteed for a restricted region of initial conditions, which requires stricter constraints compared to asymptotic stability. Secondly, the convergence of the system state is imposed onto to a ball centered at the origin within a finite time.
- The FTSA and FTFC results can be directly derived from the class of FOS with CFD as corollaries of the results obtained for the case of CTFD. This offers a unified framework that permits the seamless transition between CTFD and CFD.
- In [20], the LMI conditions depend on a specific positive scalar, which is the upper bound of the delay. The proposed results provide greater flexibility in resolving these LMIs. In fact, this upper bound can be any positive scalar.
- Two means of FTSA and FTFC are developed. In the first one, two stages are proposed in the analysis. LMIs are firstly solved and a minimizing problem, containing a Mittag–Leffler function, is then adressed. In the second way, the previous two stages are solved in only one stage, which allows us to reduce the conservatism.
2. Preliminaries
3. FTSA for Takagi–Sugeno TDFOS
4. FTFC Takagi–Sugeno TDFOS
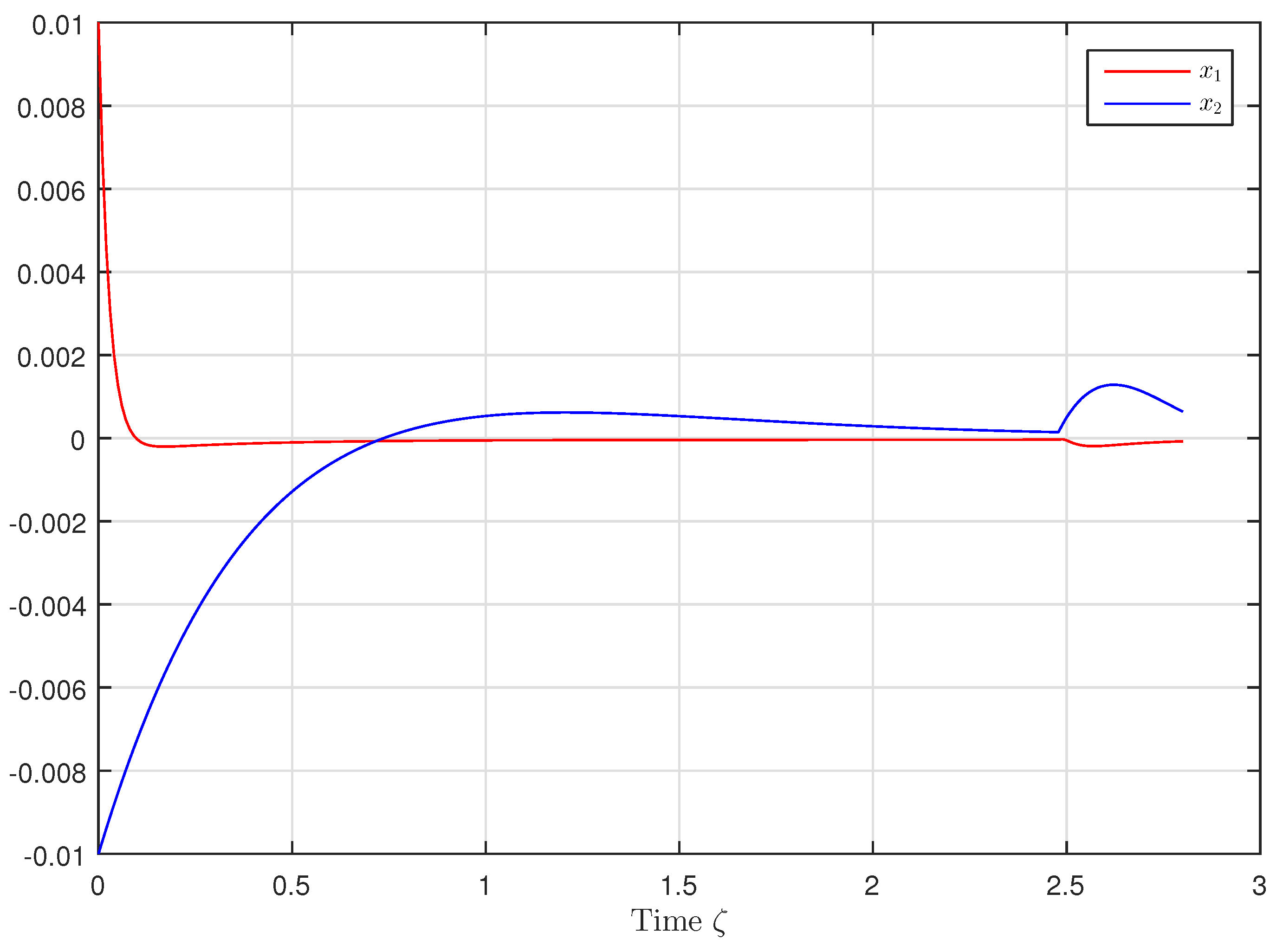
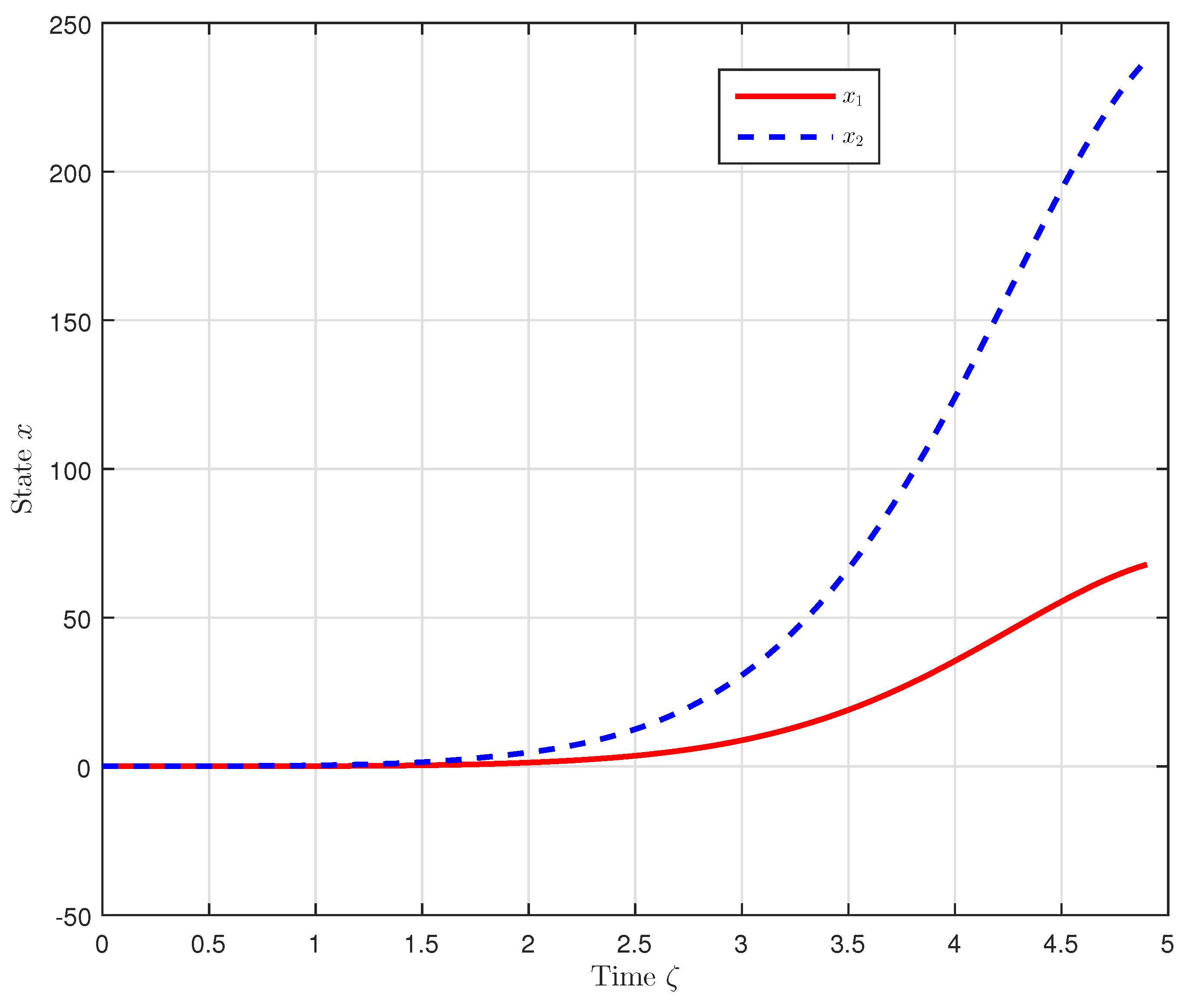
5. Illustrative Examples
5.1. Example 1
5.2. Example 2: Application to an Inverted Pendulum
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhou, B. Finite-time stability analysis and stabilization by bounded linear time-varying feedback. Automatica 2020, 121, 109191. [Google Scholar] [CrossRef]
- Xu, C.; Liu, Q.; Tang, X.; Sun, L.; Deng, P.; Liu, H. Dynamic stability analysis of jointed rock slopes using the combined finite-discrete element method (FDEM). Comput. Geotech. 2023, 160, 105556. [Google Scholar] [CrossRef]
- Takagi, T.; Sugeno, M. Fuzzy identification of systems and its applications to modeling and control. IEEE Trans. Fuzzy Syst. 1985, 15, 116–132. [Google Scholar] [CrossRef]
- Kim, E.; Lee, H. New approaches to relaxed quadratic stability condition of fuzzy control systems. IEEE Trans. Fuzzy Syst. 2000, 8, 523–534. [Google Scholar]
- Nguyen, A.-T.; Campos, V.; Guerra, T.-M.; Pan, J.; Xie, W. Takagi–Sugeno fuzzy observer design for nonlinear descriptor systems with unmeasured premise variables and unknown inputs. Int. J. Robust Nonlinear Control 2021, 31, 8353–8372. [Google Scholar] [CrossRef]
- Cao, Y.-Y.; Franck, P.M. Analysis and synthesis of nonlinear time-delay system via fuzzy control approach. IEEE Trans. Fuzzy Syst. 2000, 8, 200–211. [Google Scholar]
- Gassara, H.; ElHajjaji, A.; Chaabane, M. Observer-based robust H∞ reliable control for uncertain TS fuzzy systems with state time delay. IEEE Trans. Fuzzy Syst. 2010, 18, 1027–1040. [Google Scholar] [CrossRef]
- Yanga, F.; Guana, S.; Wang, D. Quadratically convex combination approach to stability of T–S fuzzy systems with time-varying delay. J. Frankl. Inst. 2014, 351, 3752–3765. [Google Scholar] [CrossRef]
- Mátyás, A.; Nagy, Z.; Lendek, Z. Stabilization of time-delay nonlinear systems using Takagi-Sugeno fuzzy models. Fuzzy Sets Syst. 2024, 480, 108861. [Google Scholar] [CrossRef]
- Yousif, M.A.; Hamasalh, F.K. The fractional non-polynomial spline method: Precision and modeling improvements. Math. Comput. Simul. 2024, 218, 512–525. [Google Scholar] [CrossRef]
- Kilbas, A.A.; Srivastava, H.M.; Trujillo, J.J. Theory and applications of fractional differential equations. In North-Holland Mathematics Studies; Elsevier Science B.V.: Amsterdam, The Netherlands, 2006; Volume 204. [Google Scholar]
- Li, C.; Deng, W.; Zhao, L. Well-posedness and numerical algorithm for the tempered fractional differential equations. Discret. Contin. Dyn. Syst.-Ser. B 2019, 24, 1989–2015. [Google Scholar] [CrossRef]
- Deng, J.; Ma, W.; Deng, K.; Li, Y. Tempered Mittag-Leffler Stability of Tempered Fractional Dynamical Systems. Math. Probl. Eng. 2020, 2020, 7962542. [Google Scholar] [CrossRef]
- Chen, L.; Guo, W.; Gu, P.; Lopes, A.M.; Chu, Z.; Chen, Y.Q. Stability and Stabilization of Fractional-Order Uncertain Nonlinear Systems With Multiorder. IEEE Trans. Circuits Syst. II Express Briefs 2022, 70, 576–580. [Google Scholar] [CrossRef]
- Chen, L.; Gu, P.; Lopes, A.M.; Chai, Y.; Xu, S.; Ge, S. Asymptotic Stability of Fractional-Order Incommensurate Neural Networks. Neural Process. Lett. 2023, 55, 5499–5513. [Google Scholar] [CrossRef]
- Makhlouf, A.B. Partial practical stability for fractional-order nonlinear systems. Math. Methods Appl. Sci. 2022, 45, 5135–5148. [Google Scholar] [CrossRef]
- Yousefi, M.; Binazadeh, T. Delay-independent sliding mode control of time-delay linear fractional order systems. Trans. Inst. Meas. Control 2016, 40, 1212–1222. [Google Scholar] [CrossRef]
- Huong, D.C. Event-triggered H∞ control for fractional-order time-delay systems. Asian J. Control 2024. [Google Scholar] [CrossRef]
- Makhlouf, A.B. A novel finite time stability analysis of nonlinear fractional-order time delay systems: A fixed point approach. Asian J. Control 2022, 24, 3580–3587. [Google Scholar] [CrossRef]
- Thanh, N.T.; Phat, V.N. Improved approach for finite-time stability of nonlinear fractional-order systems with interval time-varying delay. IEEE Trans. Circ. Sys. II Exp. Bri. 2019, 66, 1356–1360. [Google Scholar] [CrossRef]
- Thanh, N.T.; Phat, V.N.; Niamsup, P. New finite-time stability analysis of singular fractional differential equations with time-varying delay. Fract. Calc. Appl. Anal. 2020, 23, 504–519. [Google Scholar] [CrossRef]
- Shi, G.; Zou, Y.; Wang, C. An algebraic approach to robust H∞ control via state feedback. Syst. Control Lett. 1992, 18, 365–370. [Google Scholar] [CrossRef]
- Choi, S.K.; Kang, B.; Koo, N. Stability for Caputo Fractional Differential Systems. Abstr. Appl. Anal. 2014, 2014, 1–6. [Google Scholar] [CrossRef]
- Lin, C.; Wang, Q.-G.; Lee, T.H.; He, Y.; Chen, B. Design of observer based H∞ for fuzzy time-delay systems. IEEE Trans. Fuzzy Syst. 2008, 16, 534–543. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
| Methods | Minimum Allowed |
|---|---|
| Theorem of Thanh et al. [20] | |
| Corollary 1 for | |
| Corollary 2 for | |
| Corollary 1 for | 425 |
| Corollary 2 for | 37 |
| Methods | Minimum Allowed |
|---|---|
| Theorem 2 for | |
| Theorem 3 for |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gassara, H.; Tlija, M.; Mchiri, L.; Ben Makhlouf, A. Finite Time Stability Analysis and Feedback Control for Takagi–Sugeno Fuzzy Time Delay Fractional-Order Systems. Symmetry 2024, 16, 1344. https://doi.org/10.3390/sym16101344
Gassara H, Tlija M, Mchiri L, Ben Makhlouf A. Finite Time Stability Analysis and Feedback Control for Takagi–Sugeno Fuzzy Time Delay Fractional-Order Systems. Symmetry. 2024; 16(10):1344. https://doi.org/10.3390/sym16101344
Chicago/Turabian StyleGassara, Hamdi, Mehdi Tlija, Lassaad Mchiri, and Abdellatif Ben Makhlouf. 2024. "Finite Time Stability Analysis and Feedback Control for Takagi–Sugeno Fuzzy Time Delay Fractional-Order Systems" Symmetry 16, no. 10: 1344. https://doi.org/10.3390/sym16101344
APA StyleGassara, H., Tlija, M., Mchiri, L., & Ben Makhlouf, A. (2024). Finite Time Stability Analysis and Feedback Control for Takagi–Sugeno Fuzzy Time Delay Fractional-Order Systems. Symmetry, 16(10), 1344. https://doi.org/10.3390/sym16101344