
Modeling and Dynamic Analysis of Algae–Fish Model with Two State-Dependent Impulse Controls

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
2. State Feedback Impulsive Model
2.1. Free Developing Model
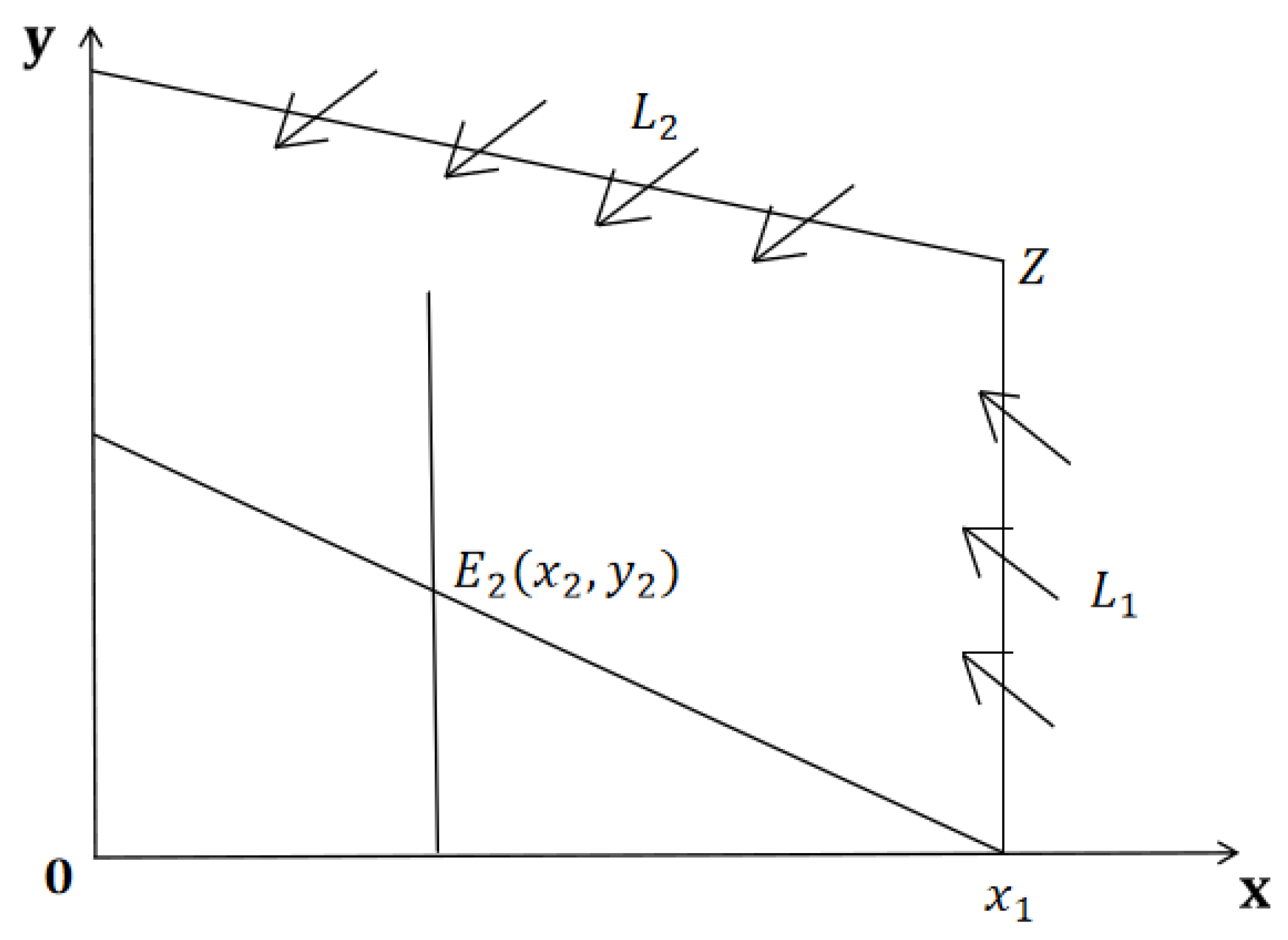
2.2. State Feedback Impulsive Model
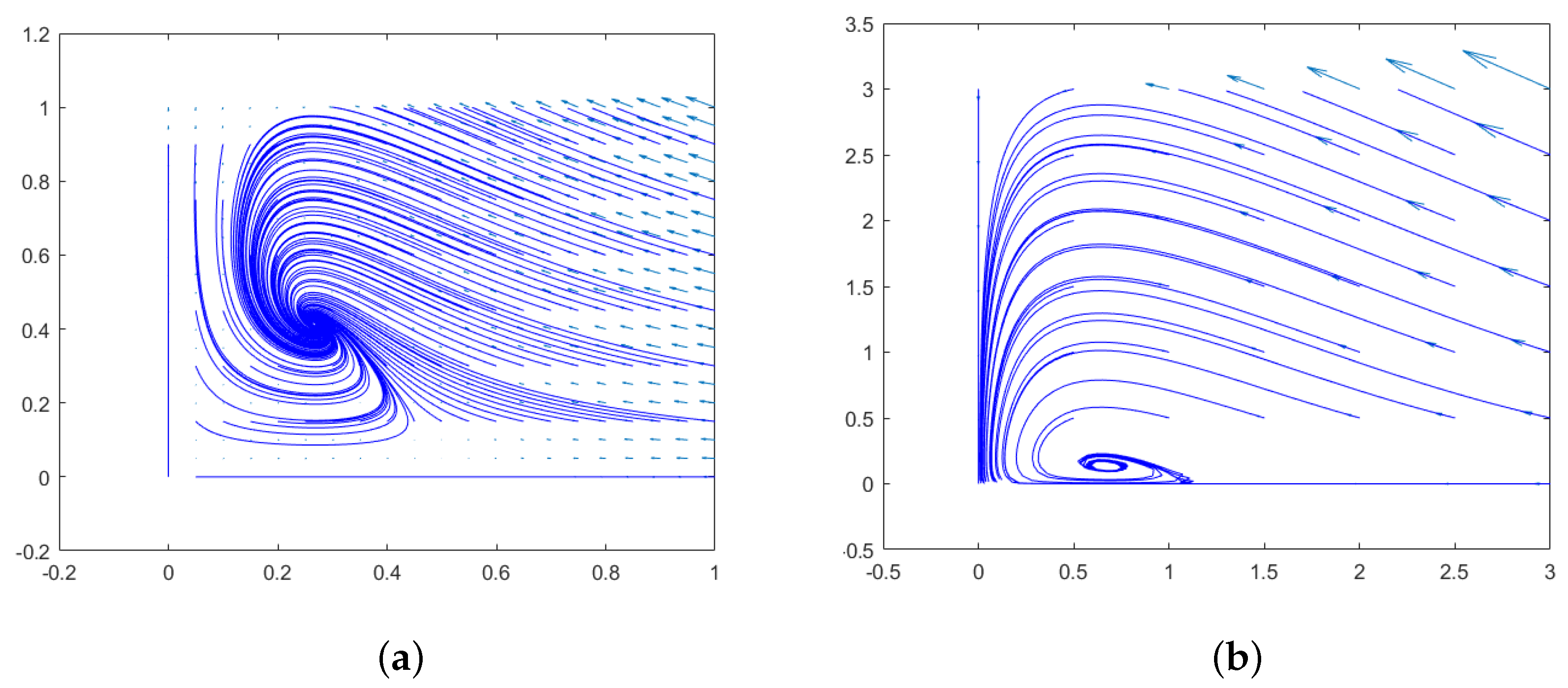
3. Analysis of Continuous System Dynamic Behavior
- (1)
- If , then is the stable node point.
- (2)
- If , then is the degenerate node point.
- (3)
- If , then is the stable focus point.
4. Existence and Stability of Periodic Solution
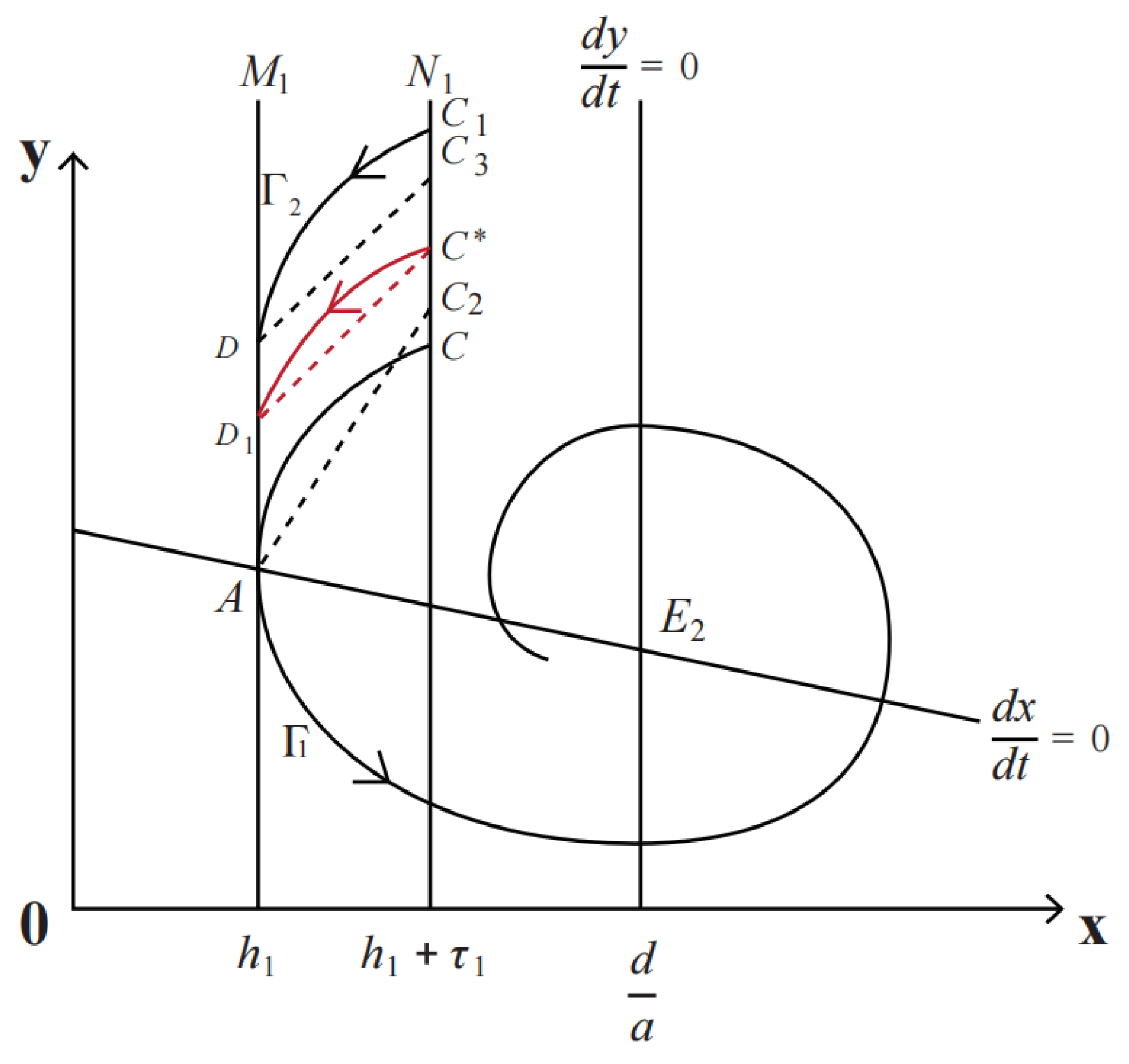
4.1. Existence and Stability of Order-1 Periodic Solution
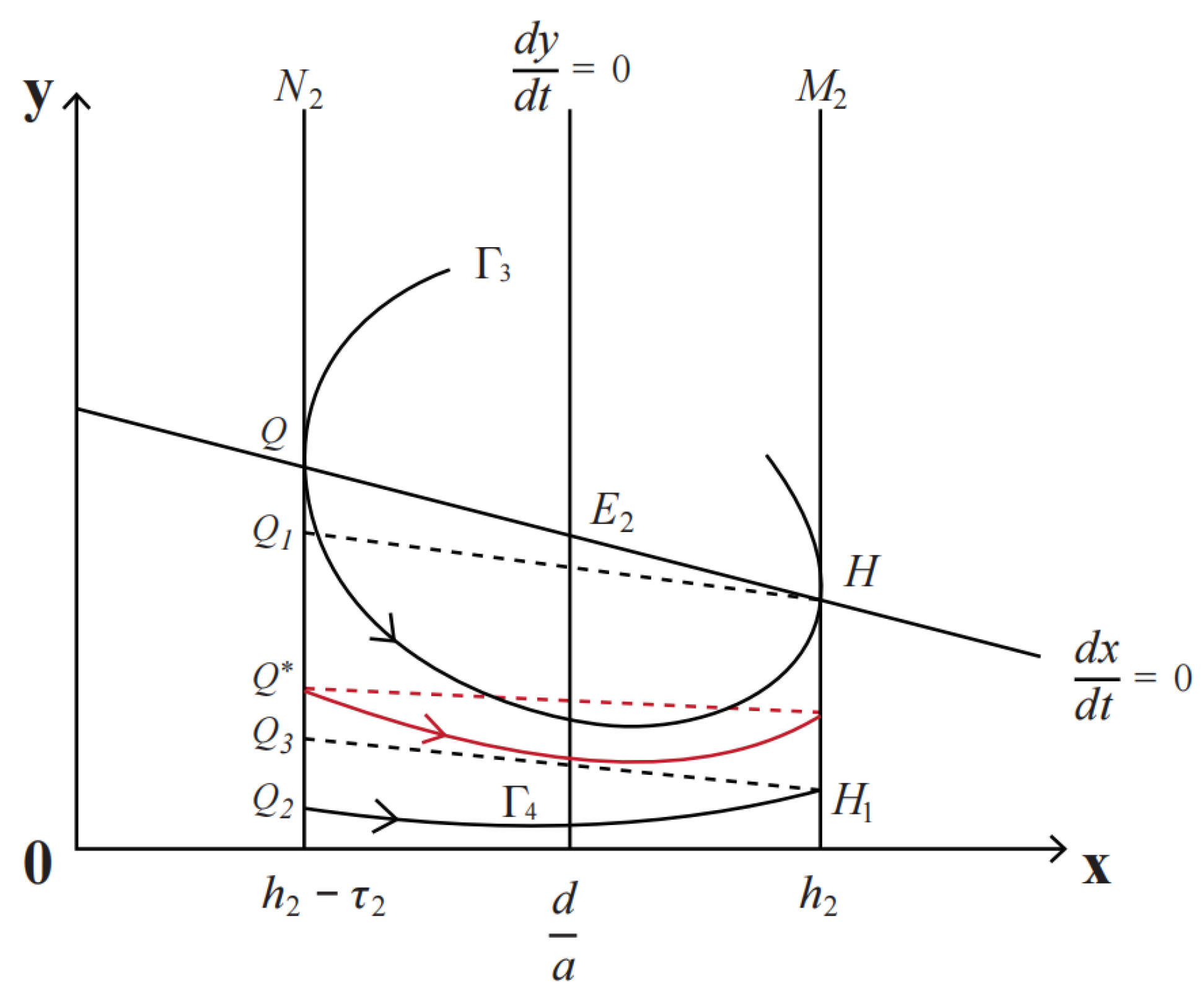
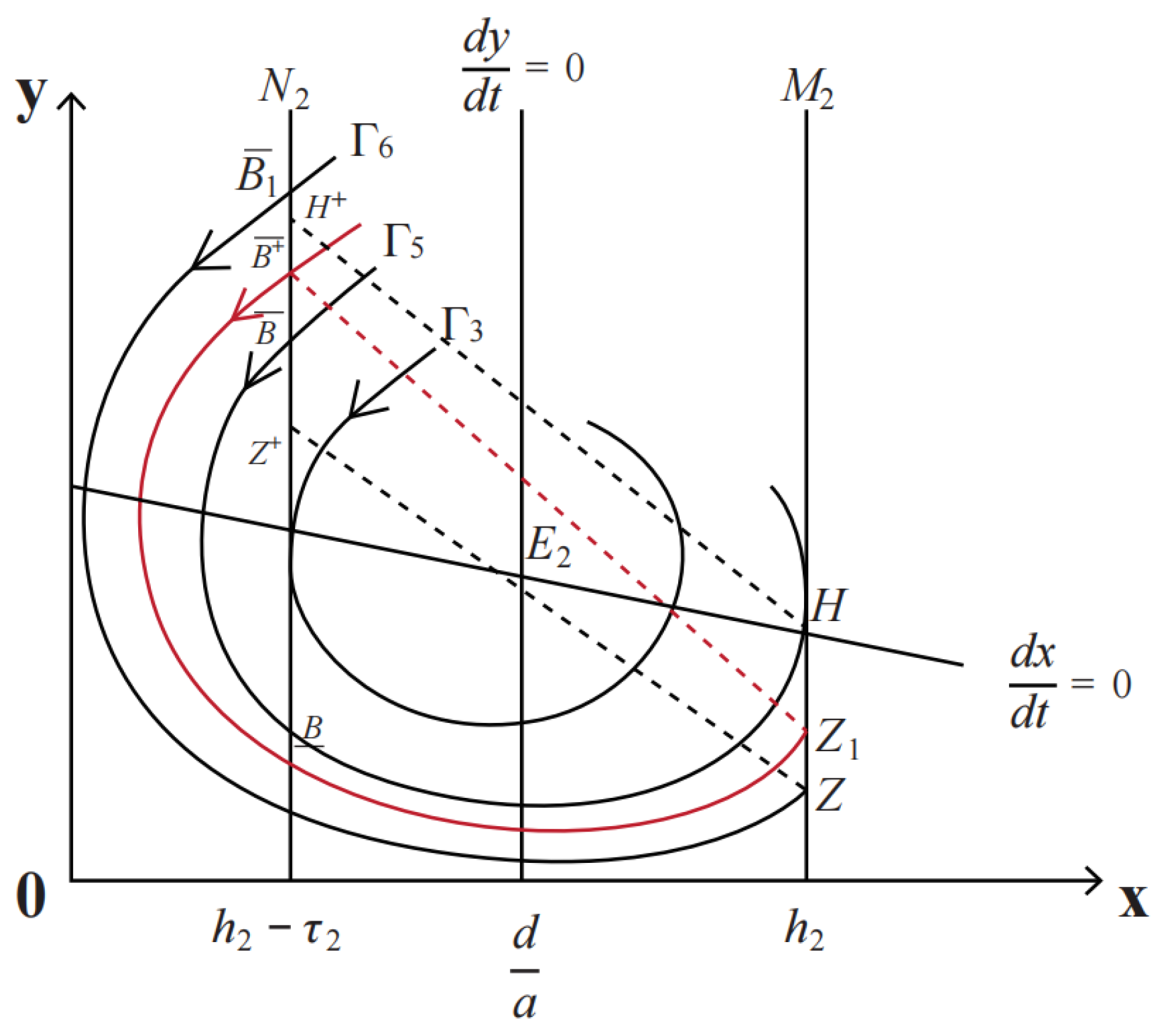
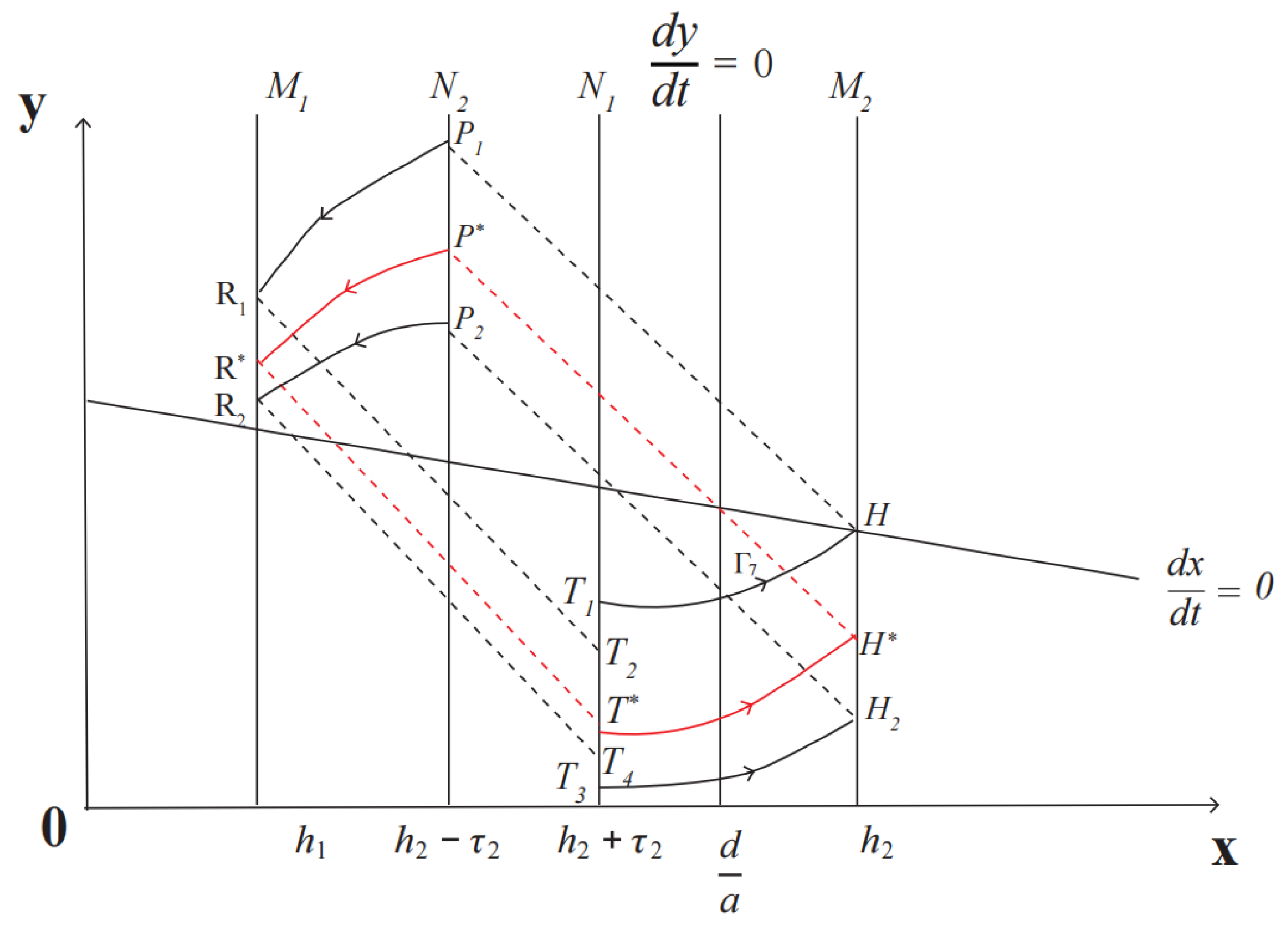
4.2. Existence and Stability of Order-2 Periodic Solution
5. Numerical Simulation
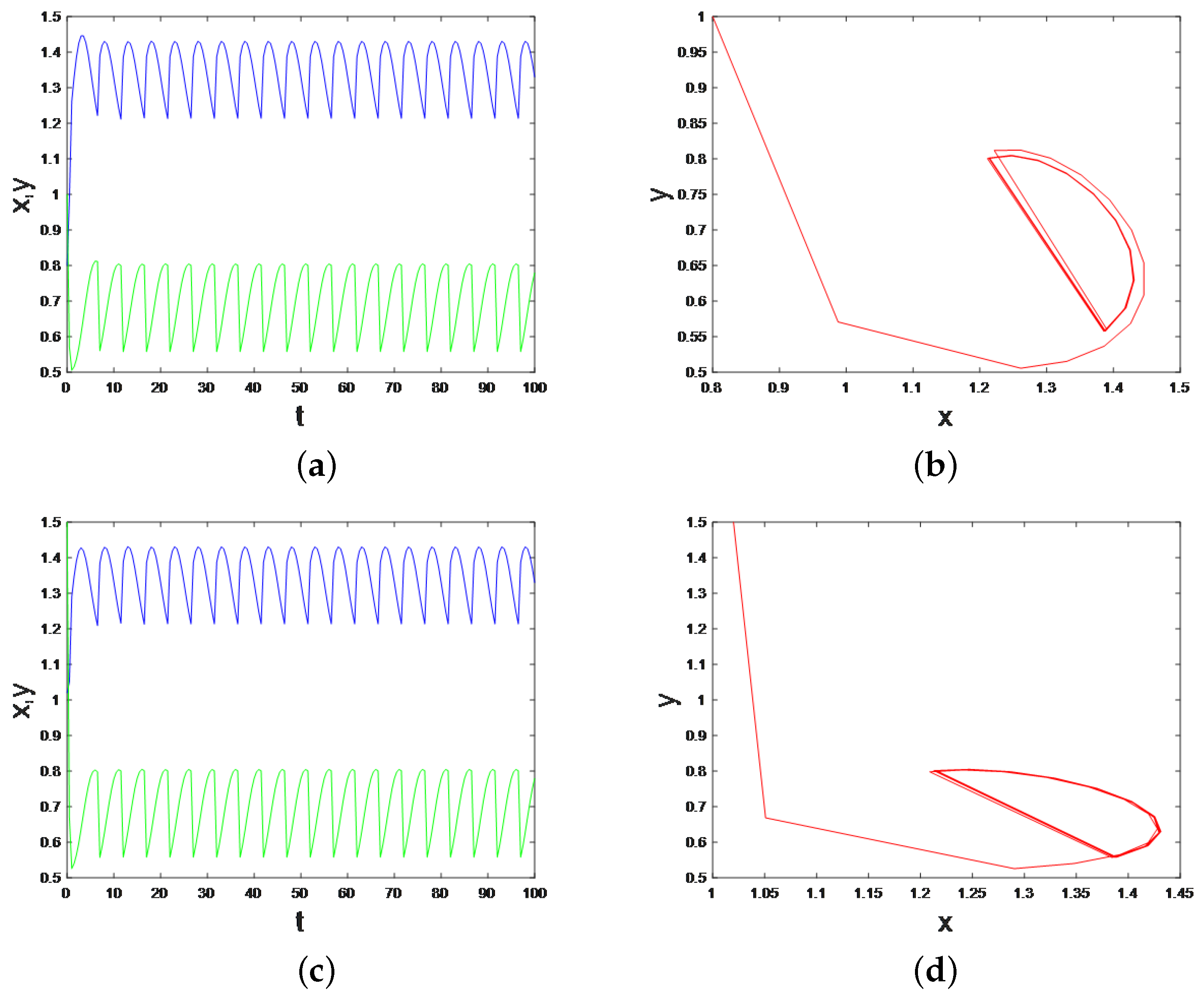
5.1. The Order-1 Periodic Solution Numerical Simulation
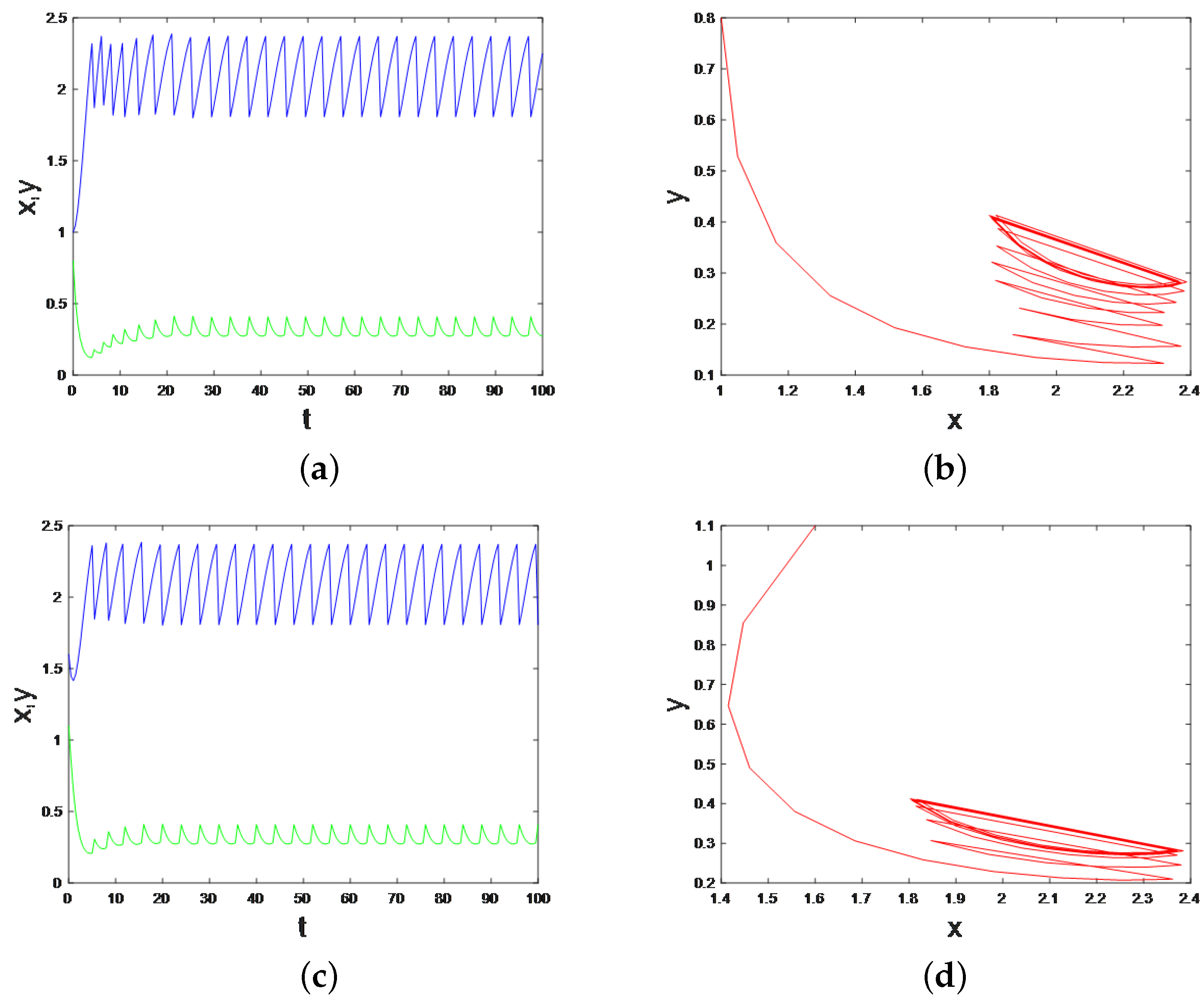
5.2. The Order-2 Periodic Solution Numerical Simulation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Srirengaraj, V.; Einar, R.; Hamed, G. Use of Algae in Aquaculture: A Review. Fishes 2024, 9, 63. [Google Scholar] [CrossRef]
- Wang, C.; Jiang, C.; Gao, T. Improvement of fish production and water quality in a recirculating aquaculture pond enhanced with bacteria-microalgae association. Aquaculture 2022, 547, 737420. [Google Scholar] [CrossRef]
- Chen, L. Mathematical Ecology Model and Research Method; Science Press: Beijing, China, 2017; pp. 259–318. [Google Scholar]
- Tang, S.; Xiao, Y. Biomathematics; Science Press: Beijing, China, 2019; pp. 132–168. [Google Scholar]
- Chen, L. Pest management and geometric theory of semicontinuous dynamical systems. Beihua Univ. (Nat. Sci.) 2011, 12, 1–9. [Google Scholar]
- Gazi, N.; Das, K. Structural stability analysis of an algal bloom mathematical model in tropic interaction. Nonlinear Anal. Real World Appl. 2010, 11, 2191–2206. [Google Scholar] [CrossRef]
- Yoshioka, H.; Yaegashi, Y. Singular stochastic control model for algae growth management in dam downstream. J. Biol. Dyn. 2018, 12, 242–270. [Google Scholar] [CrossRef] [PubMed]
- Fu, J.; Chen, L. Feedback control of water hyacinth ecosystem state. Appl. Math. 2013, 26, 51–57. [Google Scholar]
- Zhao, C.; Chen, L. The geometrical analysis of a predator-pery model with two state impulses. Math. Biosci. 2012, 238, 55–64. [Google Scholar] [CrossRef] [PubMed]
- Fu, J.; Chen, L. Modelling and qualitative analysis of water hyacinth ecological system with two state-dependent impulse controls. Complexity 2018, 2018, 4543976. [Google Scholar] [CrossRef]
- Zhou, M. Dynamics Analysis of Competing Systems with State Feedback Control; Xinyang Normal University: Xinyang, China, 2022. [Google Scholar]
- Zhang, M.; Zhao, Y. State feedback impulsive modeling and dynamic analysis of ecological balance in aquaculture water with nutritional utilization rate. Appl. Math. Comput. 2020, 373, 125007. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Zhuang, Y.; Liu, Q.; Huang, L. Modeling and Dynamic Analysis of Algae–Fish Model with Two State-Dependent Impulse Controls. Symmetry 2024, 16, 1265. https://doi.org/10.3390/sym16101265
Liu Y, Zhuang Y, Liu Q, Huang L. Modeling and Dynamic Analysis of Algae–Fish Model with Two State-Dependent Impulse Controls. Symmetry. 2024; 16(10):1265. https://doi.org/10.3390/sym16101265
Chicago/Turabian StyleLiu, Ying, Yuan Zhuang, Qiong Liu, and Lizhuang Huang. 2024. "Modeling and Dynamic Analysis of Algae–Fish Model with Two State-Dependent Impulse Controls" Symmetry 16, no. 10: 1265. https://doi.org/10.3390/sym16101265
APA StyleLiu, Y., Zhuang, Y., Liu, Q., & Huang, L. (2024). Modeling and Dynamic Analysis of Algae–Fish Model with Two State-Dependent Impulse Controls. Symmetry, 16(10), 1265. https://doi.org/10.3390/sym16101265