
State-Aware High-Order Diffusion Method for Edge Detection in the Wavelet Domain


Abstract
1. Introduction
2. Mathematical Framework
2.1. Wavelet Shrinkage Method
2.2. PDE-Based Diffusion Method
3. State-Aware Wavelet Coefficients Acquisition Method Based on Anisotropic Fourth-Order Diffusion
3.1. The Equivalent Expression of the Proposed Method
3.2. The Implementation Steps
4. Numerical Experiments
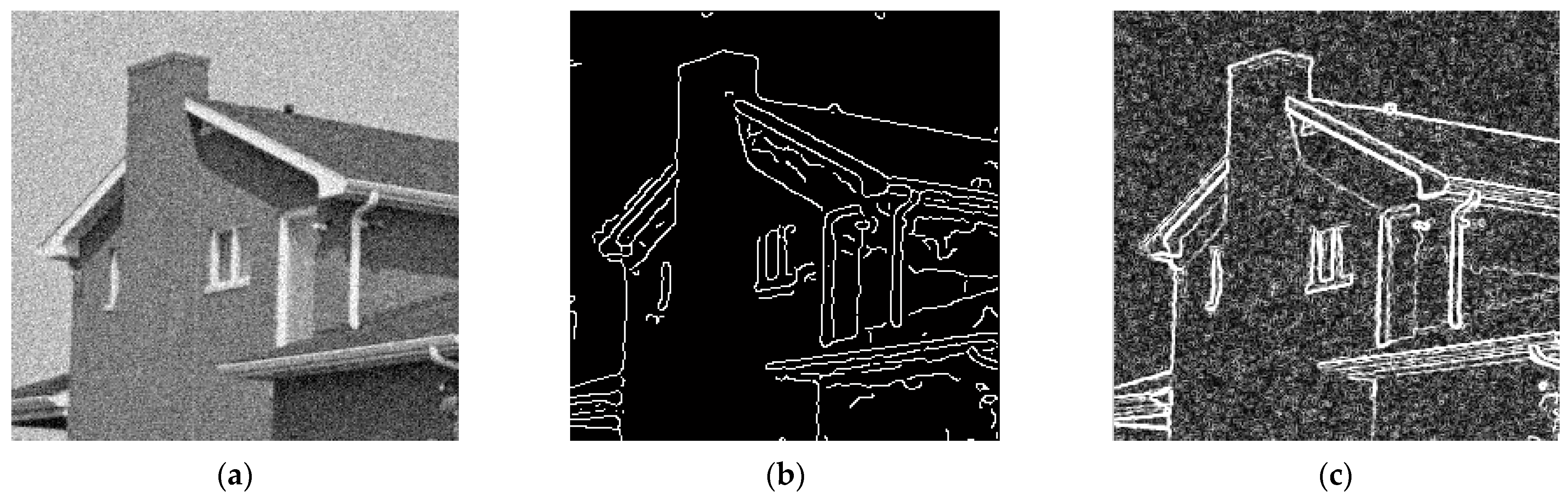
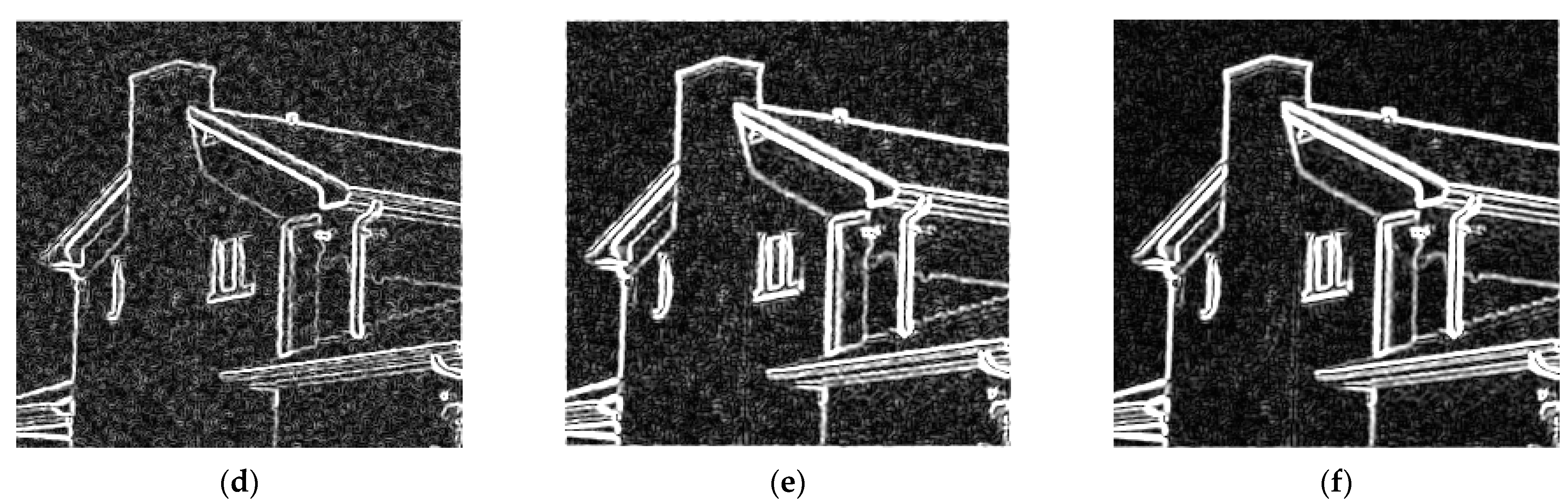
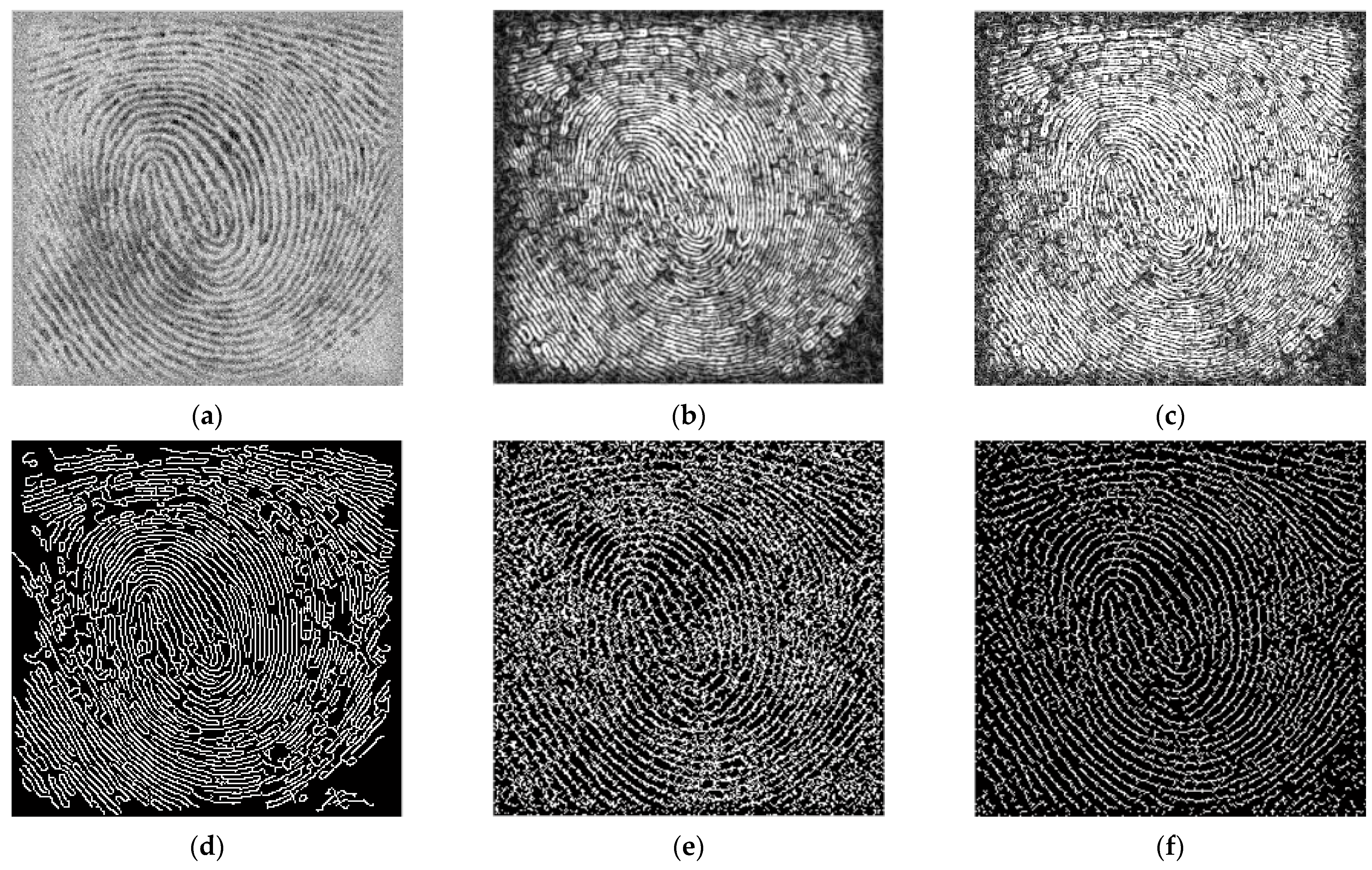
4.1. Visual Comparison
4.2. Evaluation Indicators Comparison

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Image | Gradient Detection | Gaussian Smoothed Gradient | [41] Method | The Module of Wavelet Coefficients | Our Method |
|---|---|---|---|---|---|
| Airplane | 0.6845 | 0.7251 | 0.5264 | 0.7958 | 0.8343 |
| Lena | 0.7364 | 0.7826 | 0.6215 | 0.8353 | 0.8736 |
| Clock | 0.6258 | 0.6931 | 0.5803 | 0.7238 | 0.7614 |
| Baboo | 0.5982 | 0.6348 | 0.5174 | 0.6793 | 0.6937 |
| Peppers | 0.6647 | 0.6903 | 0.5293 | 0.7218 | 0.7649 |
| Cell | 0.6105 | 0.6529 | 0.4937 | 0.6926 | 0.7795 |
| Flower | 0.7322 | 0.7851 | 0.6218 | 0.8139 | 0.8726 |
| Toys | 0.5937 | 0.6429 | 0.5242 | 0.6873 | 0.7284 |
| Starfish | 0.6584 | 0.7233 | 0.6149 | 0.7582 | 0.7936 |
| House | 0.6846 | 0.7361 | 0.5264 | 0.7843 | 0.8159 |
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Donoho, D.L.; Johnstone, I.M. Wavelet Shrinkage: Asymptopia? J. R. Stat. Soc. Ser. B 1995, 57, 301–369. [Google Scholar] [CrossRef]
- Khanna, N.; Kumar, V.; Kaushik, S.K. Wavelet packet approximation. Integral Transform. Spec. Funct. 2016, 27, 698–714. [Google Scholar] [CrossRef]
- Khanna, N.; Kaushik, S.K. Wavelet packet approximation theorem for Hr type norm. Integral Transform. Spec. Funct. 2019, 30, 231–239. [Google Scholar] [CrossRef]
- Guo, K.; Labate, D. Characterization and analysis of edges using the continuous Shearlet transform. SIAM J. Imaging Sci. 2009, 2, 959–986. [Google Scholar] [CrossRef]
- Hana, R.; Foued, S. A wavelet-assisted subband denoising for tomographic image reconstruction. J. Vis. Commun. Image Represent. 2018, 55, 115–130. [Google Scholar]
- Bayer, F.M.; Kozakevicius, A.J.; Cintra, R.J. An iterative wavelet threshold for signal denoising. Signal Process. 2019, 162, 10–20. [Google Scholar] [CrossRef]
- Cai, X.; Wallis, C.G.; Chan, J.Y.; McEwen, J.D. Wavelet-based segmentation on the sphere. Pattern Recognit. 2020, 100, 107081. [Google Scholar] [CrossRef]
- Liu, C.X.; Pang, M.Y. Automatic lung segmentation based on image decomposition and wavelet transforms. Biomed. Signal Process. Control 2020, 61, 102032. [Google Scholar] [CrossRef]
- Kumar, A.; Saha, S.; Bhattacharya, R. Wavelet transform based novel edge detection algorithms for wideband spectrum sensing in CRNs. AEU-Int. J. Electron. Commun. 2018, 84, 100–110. [Google Scholar] [CrossRef]
- Zhang, M.; Yang, C.; Yuan, Y.; Guan, Y.; Wang, S.; Liu, Q. multi-wavelet guided deep mean-shift prior for image restoration. Signal Process. Image Commun. 2021, 99, 116449. [Google Scholar] [CrossRef]
- Wang, J.Y.; Du, Z.G. A method of processing color image watermarking based on the Haar wavelet. J. Vis. Commun. Image Represent. 2019, 64, 102627. [Google Scholar] [CrossRef]
- Donoho, D.L. Denoising by soft thresholding. IEEE Trans. Inf. Theory 1995, 41, 613–627. [Google Scholar] [CrossRef]
- Zhang, L.; Bao, P.; Pan, Q. Threshold analysis in wavelet based denoising. IEEE Electron. Lett. 2001, 37, 1485–1486. [Google Scholar] [CrossRef]
- Saha, M.; Naskar, M.K.; Chatterji, B.N. Soft, hard and block thresholding techniques for denoising of mammogram image. IETE J. Res. 2015, 61, 186–191. [Google Scholar] [CrossRef]
- Rudin, L.; Osher, S.; Fatemi, E. Nonlinear total variation-based noise removal algorithms. Physica D 1992, 60, 259–268. [Google Scholar] [CrossRef]
- Perona, P.; Malik, J. Scale-space and edge detection using anisotropic diffusion. IEEE Trans. Pattern Anal. Mach. Intell. 1990, 12, 629–639. [Google Scholar] [CrossRef]
- Zou, Q. An image inpainting model based on the mixture of Perona-Malik equation and Cahn-Hilliard equation. J. Appl. Math. Comput. 2021, 66, 21–38. [Google Scholar] [CrossRef]
- Lou, Y.; Zeng, T.; Osher, S.; Xin, J. A weighted difference of anisotropic and isotropic total variation model for image processing. SIAM J. Imaging Sci. 2015, 8, 1798–1823. [Google Scholar] [CrossRef]
- Shama, M.-G.; Huang, T.-Z.; Liu, J.; Wang, S. A convex total generalized variation regularized model for multiplicative noise and blur removal. J. Appl. Math. Comput. 2016, 276, 109–121. [Google Scholar] [CrossRef]
- Hsieh, P.-W.; Shao, P.-C.; Yang, S.-Y. A regularization model with adaptive diffusivity for variational image denoising. Signal Process. 2018, 149, 214–228. [Google Scholar] [CrossRef]
- Pang, Z.-F.; Zhou, Y.-M.; Wu, T.; Li, D.-J. Image denoising via a new anisotropic total variation-based model. Signal Process. Image Commun. 2019, 74, 140–152. [Google Scholar] [CrossRef]
- Lv, Y.H. Total generalized variation denoising of speckled images using a primal-dual algorithm. J. Appl. Math. Comput. 2020, 62, 489–509. [Google Scholar] [CrossRef]
- Chen, Y.; He, T.S. Image denoising via an adaptive weighted anisotropic diffusion. Multidimens. Syst. Signal Process. 2021, 32, 651–669. [Google Scholar] [CrossRef]
- You, Y.L.; Kaveh, M. Fourth-order partial differential equation for noise removal. IEEE Trans. Image Process. 2000, 9, 1723–1730. [Google Scholar] [CrossRef]
- Lysaker, M.; Lundervold, A.; Tai, X.C. Noise removal using fourth-order partial differential equation with applications to medical magnetic resonance image in space and time. IEEE Trans. Image Process. 2003, 12, 1579–1590. [Google Scholar] [CrossRef]
- Hajiaboli, M.R. An anisotropic fourth-order nonlinear diffusion filter for image noise removal. Int. J. Comput. Vis. 2011, 92, 177–191. [Google Scholar] [CrossRef]
- Shi, B.L.; Pang, Z.F.; Yang, Y.F. A projection method based on the splitting Bregman iteration for the image denoising. J. Appl. Math. Comput. 2012, 39, 533–550. [Google Scholar] [CrossRef]
- Zhang, X.J.; Ye, W.Z. An adaptive fourth-order partial differential equation for image denoising. Comput. Math. Appl. 2017, 74, 2529–2545. [Google Scholar] [CrossRef]
- Siddig, A.; Guo, Z.; Zhou, Z.; Wu, B. An image denoising model based on a fourth-order nonlinear partial differential equation. Comput. Math. Appl. 2018, 76, 1056–1074. [Google Scholar] [CrossRef]
- Yang, J.H.; Zhao, X.L.; Mei, J.J. Total variation and high-order total variation adaptive model for restoring blurred images with Cauchy noise. Comput. Math. Appl. 2019, 77, 1255–1272. [Google Scholar] [CrossRef]
- Deng, L.; Zhu, H.; Yang, Z.; Li, Y. Hessian matrix-based fourth-order anisotropic diffusion filter for image denoising. Opt. Laser Technol. 2019, 110, 184–190. [Google Scholar] [CrossRef]
- Chen, Y.; Gao, Y. Adaptive fourth-order diffusion smoothing via bilateral kernel. Signal Image Video Process. 2021, 15, 1125–1133. [Google Scholar] [CrossRef]
- Strong, D.M. Adaptive Total Variation Minimizing Image Restoration; UCLA CAM Report97-38. Ph.D. Thesis, University of California, Los Angeles, CA, USA, 1997. [Google Scholar]
- Cai, J.F.; Dong, B.; Osher, S.; Shen, Z. Image restoration: Total variation, wavelet frames, and beyond. J. Am. Math. Soc. 2012, 25, 1033–1089. [Google Scholar] [CrossRef]
- Xu, J.T.; Jia, Y.Y.; Shi, Z.F. An improved anisotropic diffusion filter with semi-adaptive threshold for edge preservation. Signal Process. 2016, 119, 80–91. [Google Scholar] [CrossRef]
- Shen, Y.; Liu, Q.; Lou, S.Q.; Hou, Y.L. Wavelet-Based Total Variation and Nonlocal Similarity Model for Image Denoising. IEEE Signal Process. Lett. 2017, 24, 877–881. [Google Scholar] [CrossRef]
- Dong, B.; Jiang, Q.T.; Shen, Z.W. Image restoration: Wavelet frame shrinkage, nonlinear evolution PDEs, and Beyond. Multiscale Model. Simul. 2017, 15, 606–660. [Google Scholar] [CrossRef]
- Xiang, R.; Wang, L.; He, Q. Image denoising algorithm based on wavelet transform and partial differential equations. Commun. Technol. 2017, 50, 30–37. [Google Scholar]
- Tanyeri, U.; Demirci, R. Wavelet-Based Adaptive Anisotropic Diffusion Filter. Adv. Electr. Comput. Eng. 2018, 18, 99–106. [Google Scholar] [CrossRef]
- Wang, J.; Yang, C.L. An improved image denoising model based on partial differential equation in wavelet domain. Comput. Technol. Autom. 2018, 37, 95–98. [Google Scholar]
- Yu, X.K.; Wang, Z.W.; Wang, Y.H.; Zhang, C.L. Edge Detection of Agricultural Products based on Morphologically Improved Canny Algorithm. Math. Probl. Eng. 2021, 2021, 6664970. [Google Scholar] [CrossRef]
- You, N.; Han, L.B.; Zhu, D.M.; Song, W.W. Research on image denoising in edge detection based on wavelet transform. Appl. Sci. 2023, 13, 1837. [Google Scholar] [CrossRef]







| Image | Gradient Detection | Gaussian Smoothed Gradient | [41] Method | The Module of Wavelet Coefficients | Our Method | |
|---|---|---|---|---|---|---|
| Airplane | 10 | 30.7249 | 31.8325 | 31.3462 | 32.4273 | 32.8672 |
| 30 | 27.9326 | 28.6239 | 28.1938 | 29.3281 | 29.9341 | |
| Lena | 10 | 32.1682 | 32.7963 | 32.3252 | 33.5754 | 34.6057 |
| 30 | 29.1543 | 29.6572 | 29.3836 | 30.3693 | 31.1639 | |
| Clock | 10 | 29.7719 | 30.5395 | 30.9467 | 31.4836 | 32.3742 |
| 30 | 27.3164 | 28.3604 | 28.5319 | 29.4625 | 30.5837 | |
| Baboo | 10 | 30.8356 | 31.7462 | 31.2953 | 32.6931 | 33.7269 |
| 30 | 28.7427 | 29.4985 | 29.1438 | 30.3438 | 31.5725 | |
| Peppers | 10 | 32.4639 | 33.3262 | 33.6423 | 34.4716 | 35.3842 |
| 30 | 29.4241 | 30.5451 | 30.7962 | 31.3932 | 32.4254 | |
| Cell | 10 | 31.7396 | 32.6835 | 31.6364 | 33.8249 | 34.6028 |
| 30 | 29.4037 | 30.2363 | 29.2038 | 31.1637 | 31.6546 | |
| Flower | 10 | 30.7063 | 31.6307 | 31.2840 | 32.8438 | 33.7143 |
| 30 | 28.2458 | 29.3352 | 28.8629 | 30.3625 | 31.3264 | |
| Toys | 10 | 31.2642 | 31.9451 | 31.6672 | 32.8340 | 33.7932 |
| 30 | 27.6385 | 28.3443 | 27.8957 | 29.1716 | 30.2537 | |
| Starfish | 10 | 30.6396 | 31.5381 | 30.4852 | 32.4633 | 33.5749 |
| 30 | 27.5167 | 28.2706 | 27.2178 | 28.9368 | 29.7472 | |
| House | 10 | 32.1474 | 33.7206 | 32.5643 | 34.5352 | 35.7385 |
| 30 | 26.3628 | 27.8583 | 26.9348 | 28.4119 | 29.6768 | |
| Average | 29.7099 | 30.6245 | 30.1679 | 31.5048 | 32.4360 |
| Image | Gradient Detection | Gaussian Smoothed Gradient | [41] Method | The Module of Wavelet Coefficients | Our Method |
|---|---|---|---|---|---|
| Airplane | 0.0396 | 0.0274 | 0.0529 | 0.0208 | 0.0153 |
| Lena | 0.0325 | 0.0291 | 0.0472 | 0.0194 | 0.0137 |
| Clock | 0.0421 | 0.0382 | 0.0557 | 0.0315 | 0.0263 |
| Baboo | 0.0396 | 0.0317 | 0.0469 | 0.0248 | 0.0195 |
| Peppers | 0.0268 | 0.0228 | 0.0335 | 0.0171 | 0.0120 |
| Cell | 0.0375 | 0.0294 | 0.0572 | 0.0269 | 0.0218 |
| Flower | 0.0282 | 0.0216 | 0.0394 | 0.0187 | 0.0116 |
| Toys | 0.0379 | 0.0325 | 0.0718 | 0.0275 | 0.0224 |
| Starfish | 0.0274 | 0.0238 | 0.0522 | 0.0182 | 0.0139 |
| House | 0.0395 | 0.0251 | 0.0693 | 0.0196 | 0.0127 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, C.; Wang, A. State-Aware High-Order Diffusion Method for Edge Detection in the Wavelet Domain. Symmetry 2023, 15, 803. https://doi.org/10.3390/sym15040803
Liu C, Wang A. State-Aware High-Order Diffusion Method for Edge Detection in the Wavelet Domain. Symmetry. 2023; 15(4):803. https://doi.org/10.3390/sym15040803
Chicago/Turabian StyleLiu, Chenhua, and Anhong Wang. 2023. "State-Aware High-Order Diffusion Method for Edge Detection in the Wavelet Domain" Symmetry 15, no. 4: 803. https://doi.org/10.3390/sym15040803
APA StyleLiu, C., & Wang, A. (2023). State-Aware High-Order Diffusion Method for Edge Detection in the Wavelet Domain. Symmetry, 15(4), 803. https://doi.org/10.3390/sym15040803