

Dual Mode Symmetrical Proportional Resonant Controlled Quadratic Boost Converter for PMSM-Drive

Abstract
:1. Introduction
1.1. Background
1.2. Literature Review
1.3. Objectives and Contributions
- Switched capacitor three-phase quadratic boost converter for the PMSM drive is designed.
- Integrated PMSM-based PI-PI, FOPID-FOPID, and PR-PR controllers are developed using the SIMULINK platform.
- The characteristic features of the proposed design are assessed, namely input voltage, the voltage across QBC, and the speed and torque of the electric motor.
- A simulation study is carried out for both open-loop and closed-loop systems.
- Illustrated the dynamic responses of the considered case’s likely time-domain parameters.
- Developed the hardware prototype of the proposed model and assessed its characteristics.
1.4. Organization of the Article
2. Problem Formulation and Proposed Methodologies
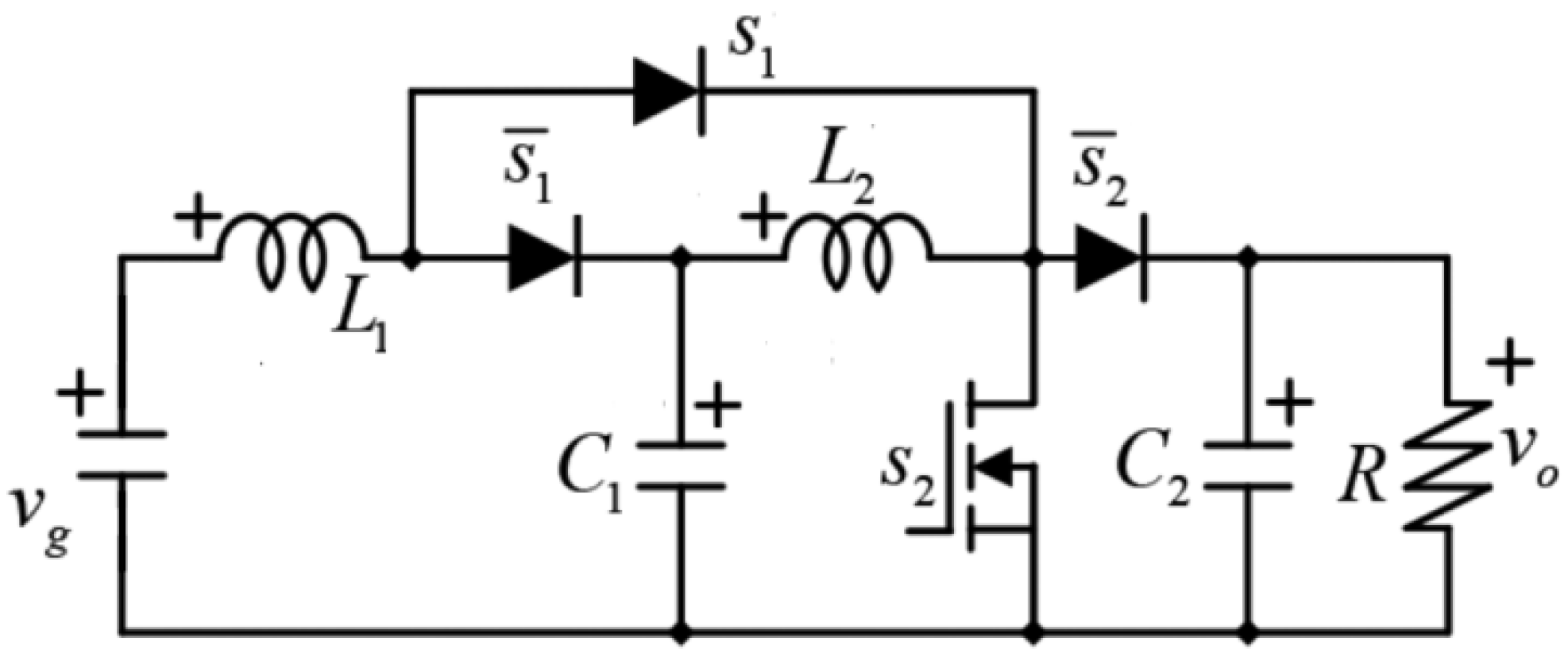
2.1. Design of QBC
2.2. Proposed Methodologies
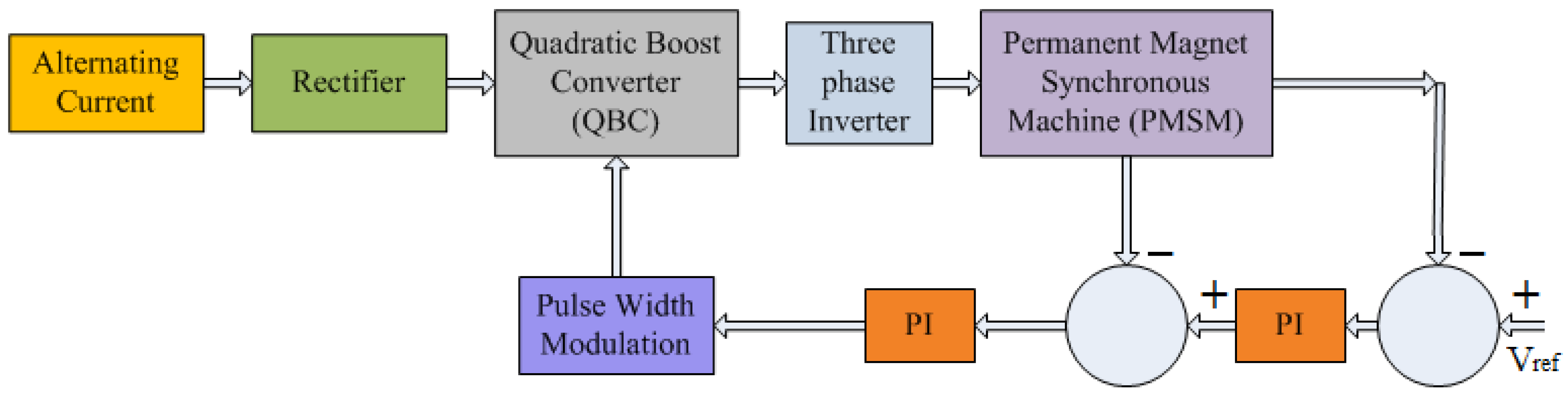
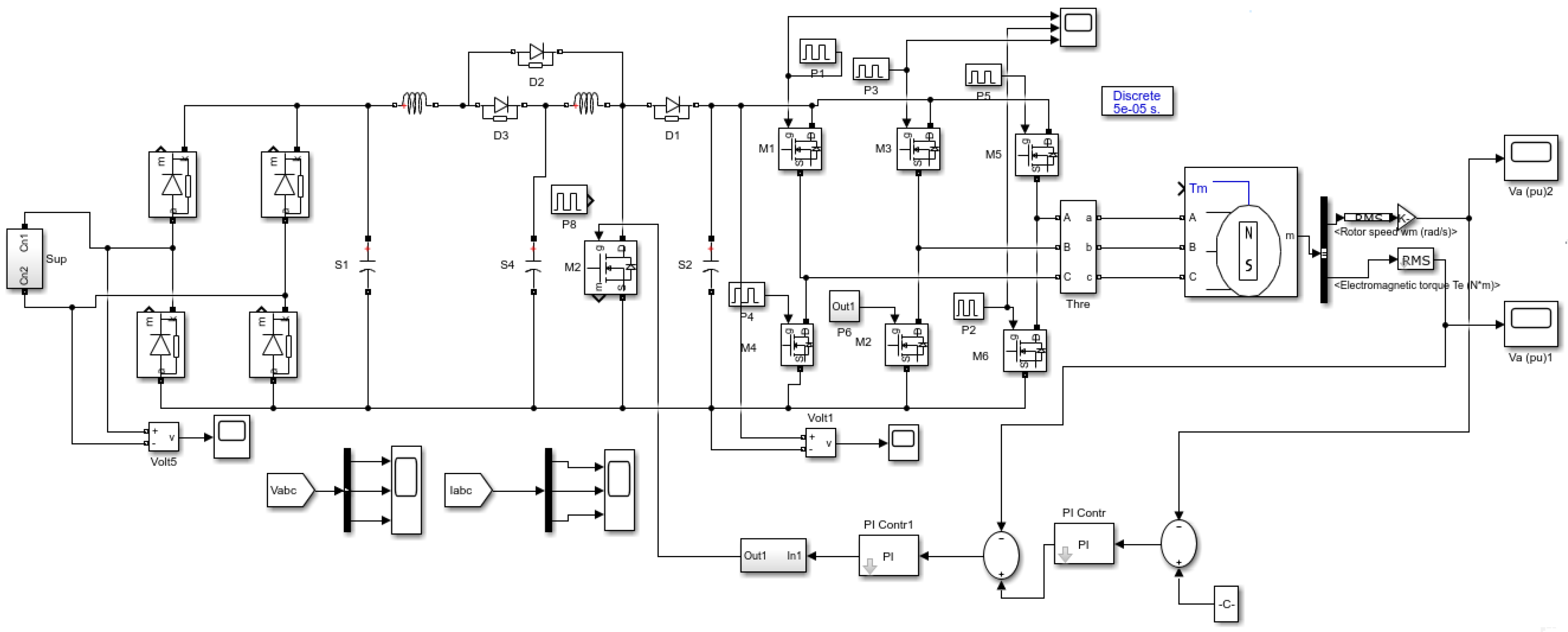
2.2.1. PI-PI Controlled QBC-TPI
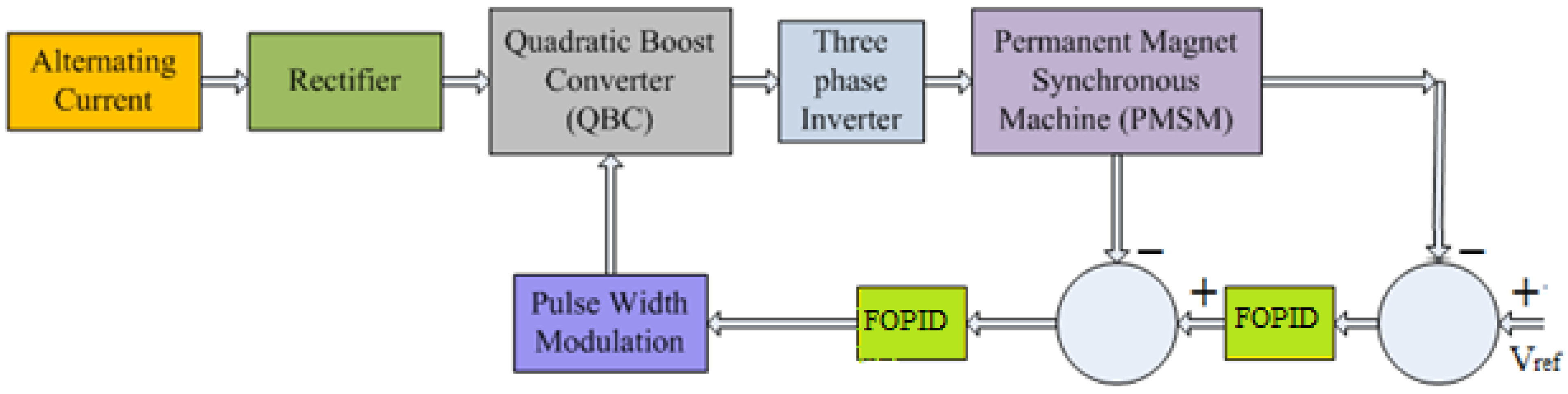
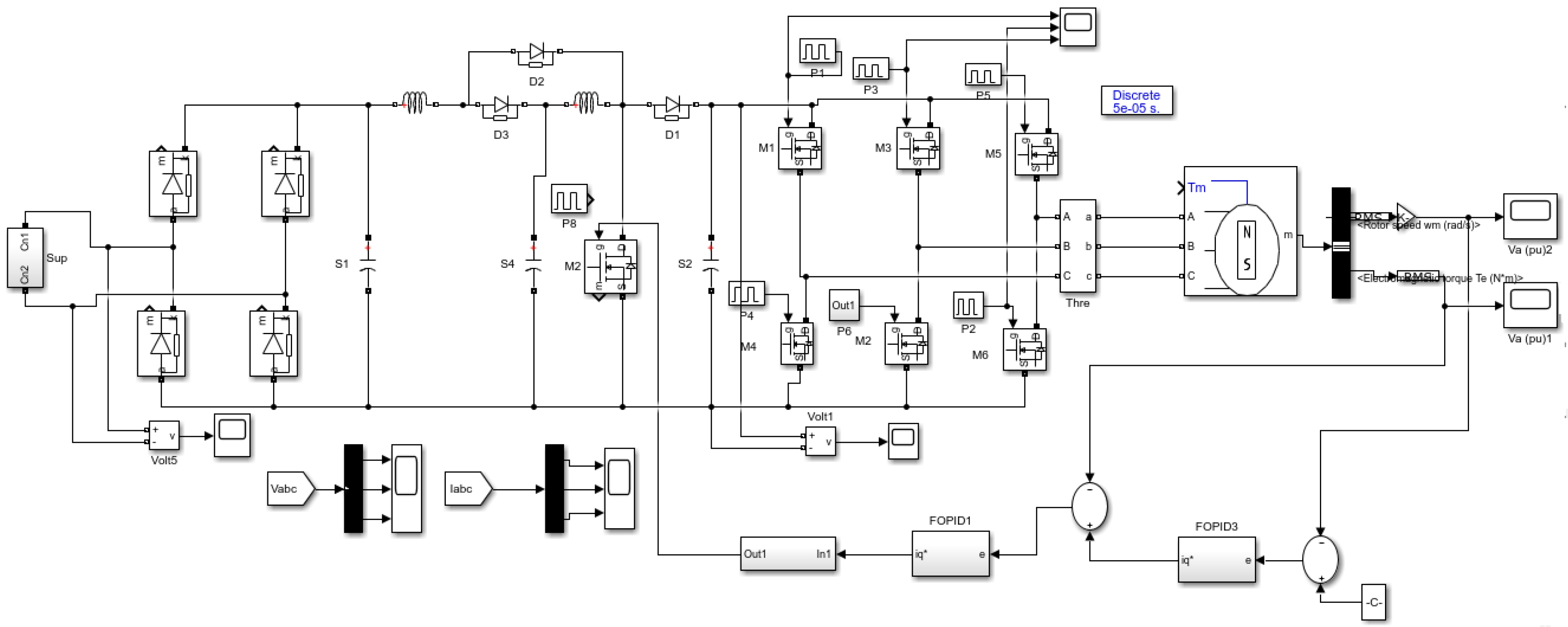
2.2.2. FOPID-FOPID Controlled QBC-TPI
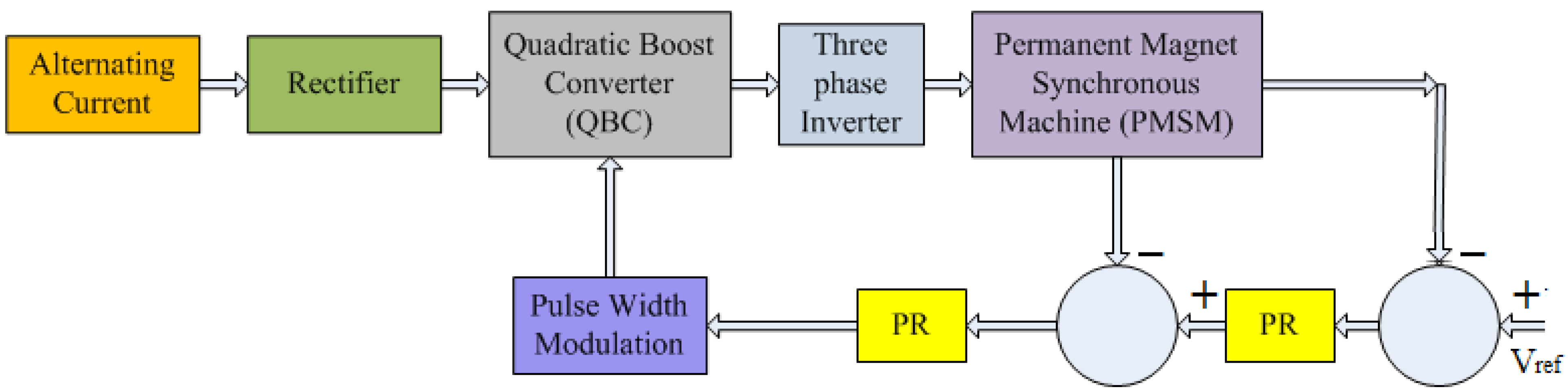
2.2.3. PR-PR Controlled QBC-TPI
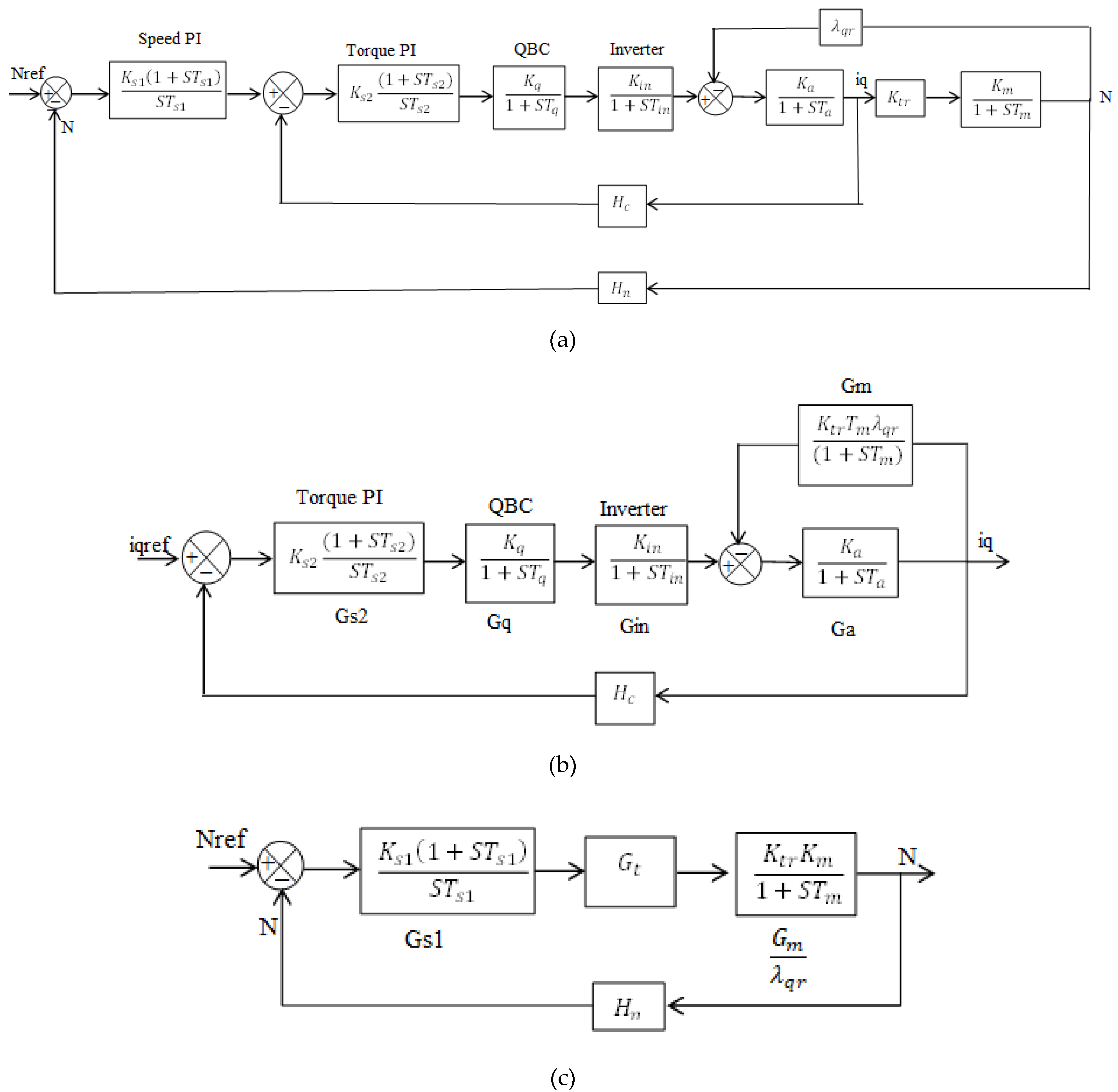
3. Mathematical Model of Proposed System
PI-PI Controller
4. Results and Discussions
4.1. Open loop SC-QBC-TPI Fed PMSM with Source Disturbance
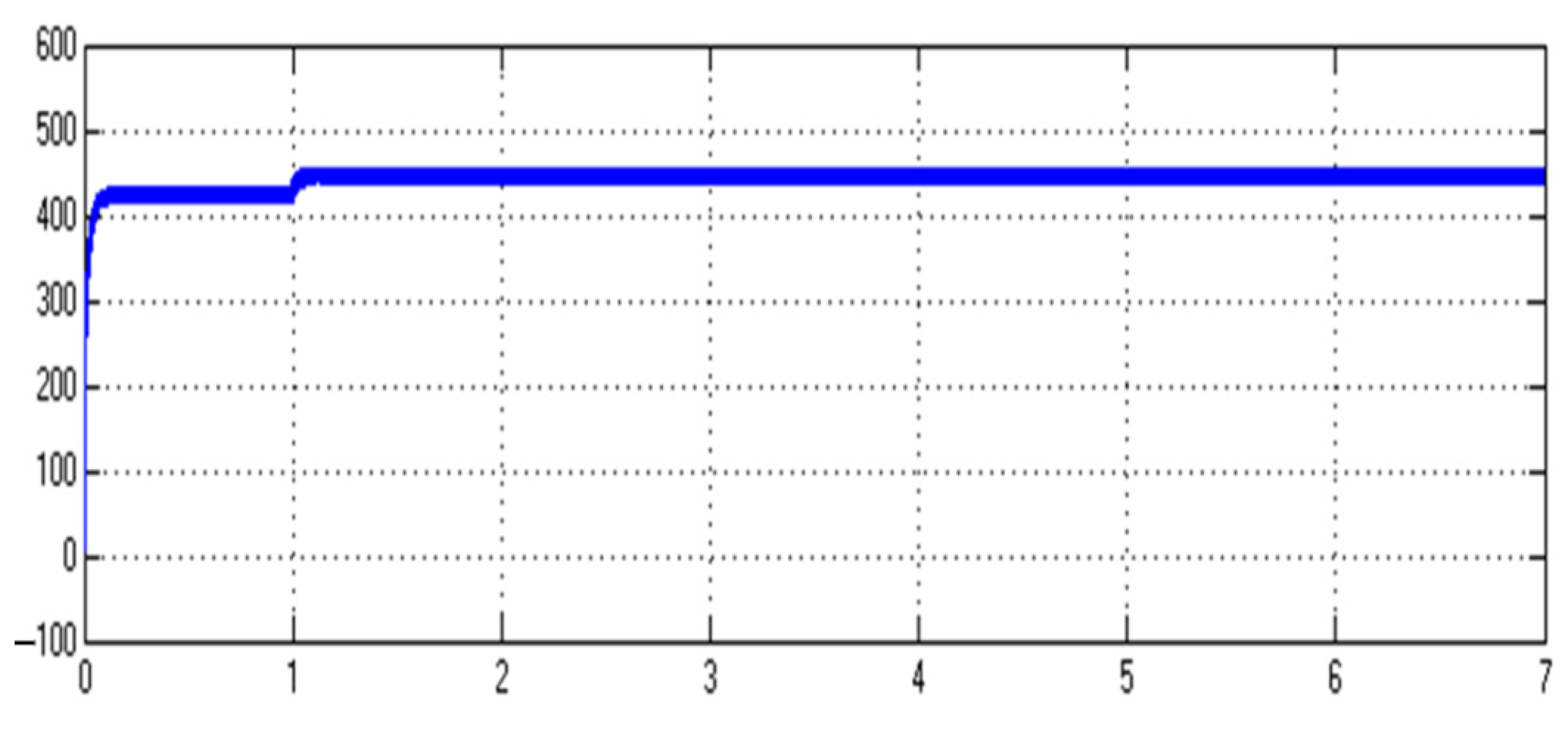
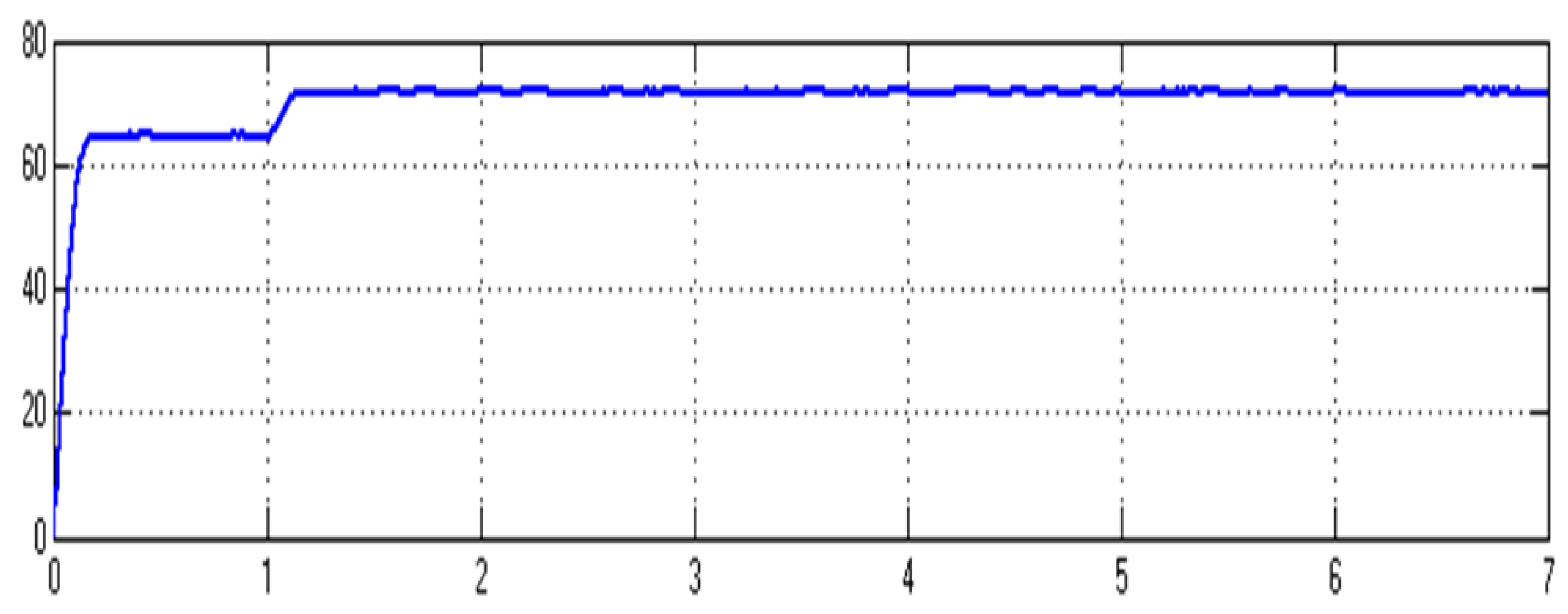
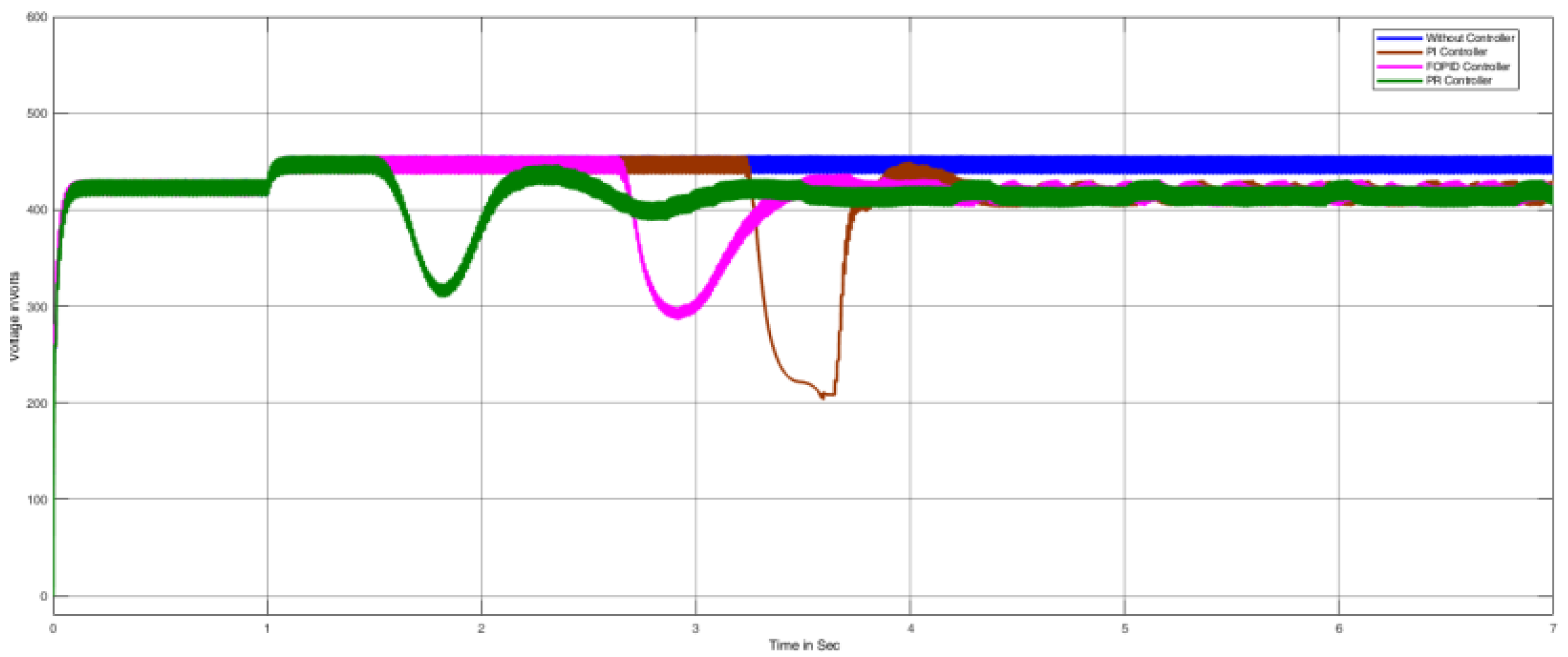
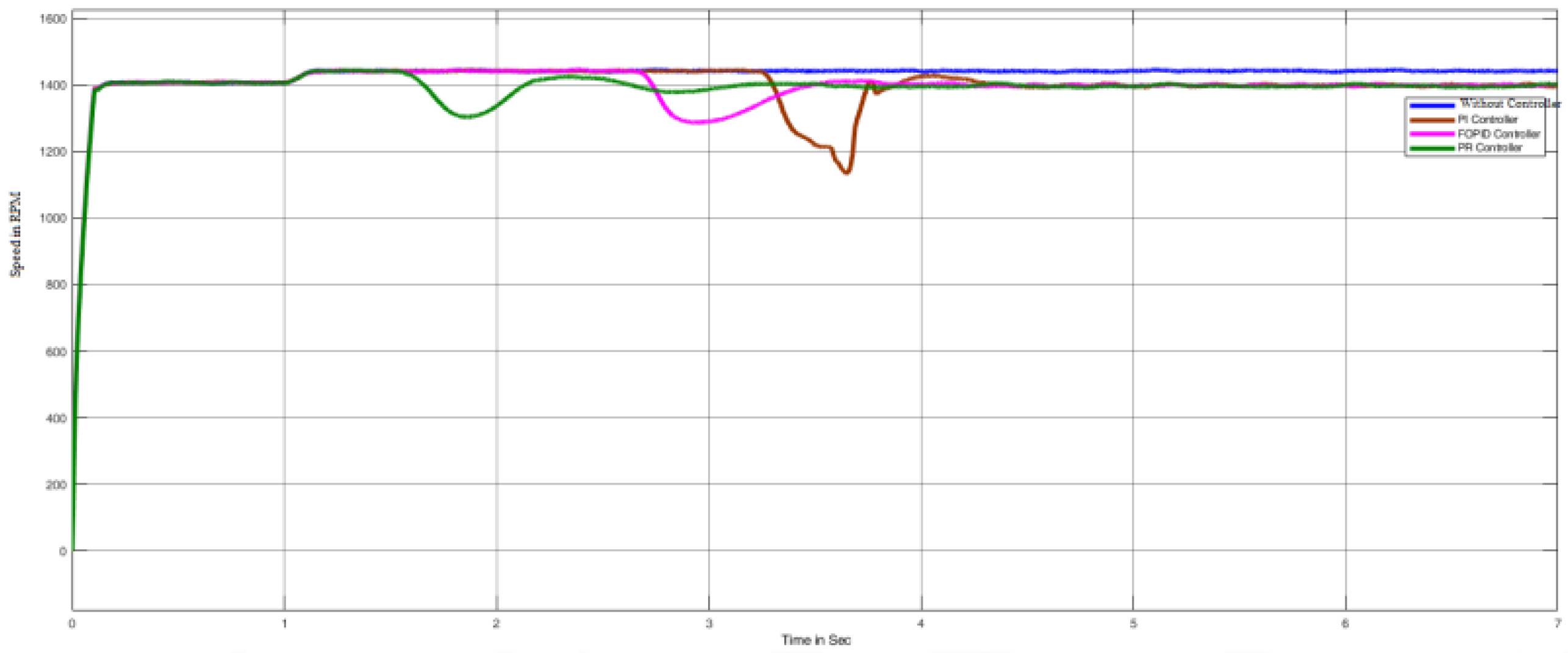
4.2. Closed Loop SC-QBC-TPI Fed PMSM
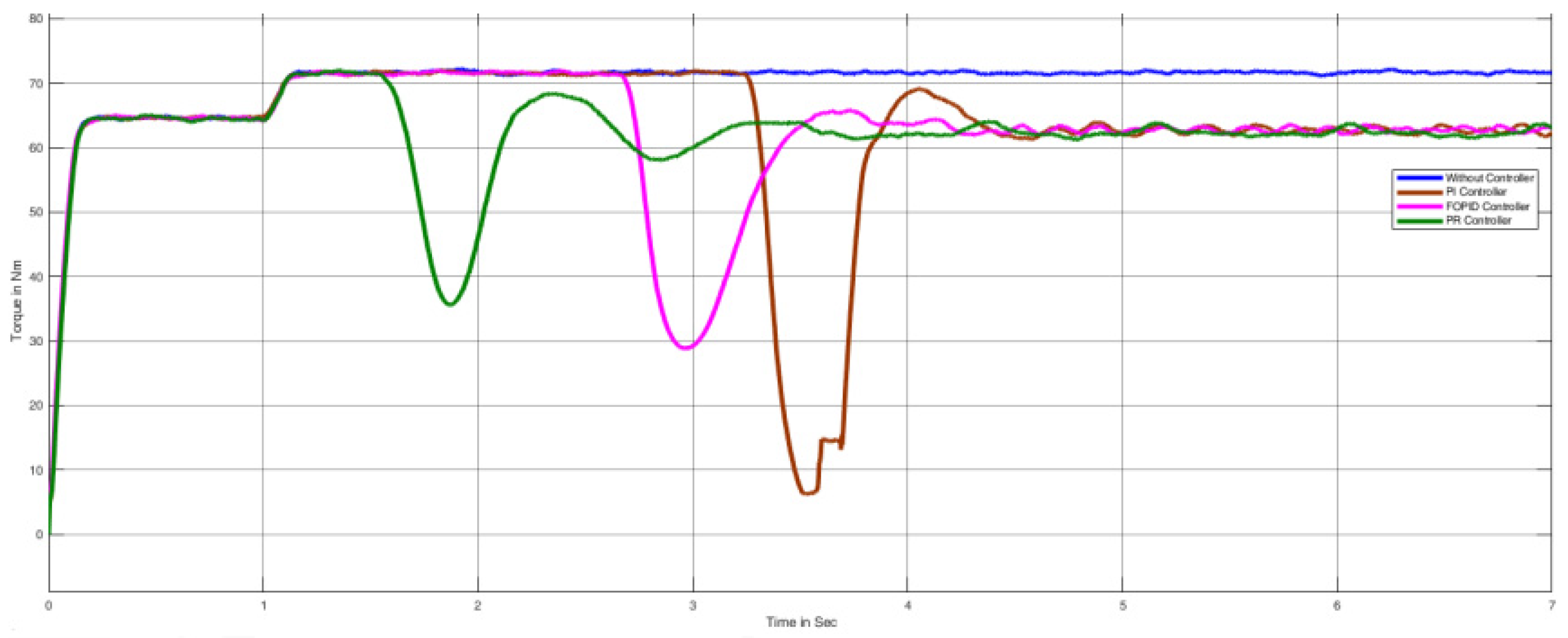
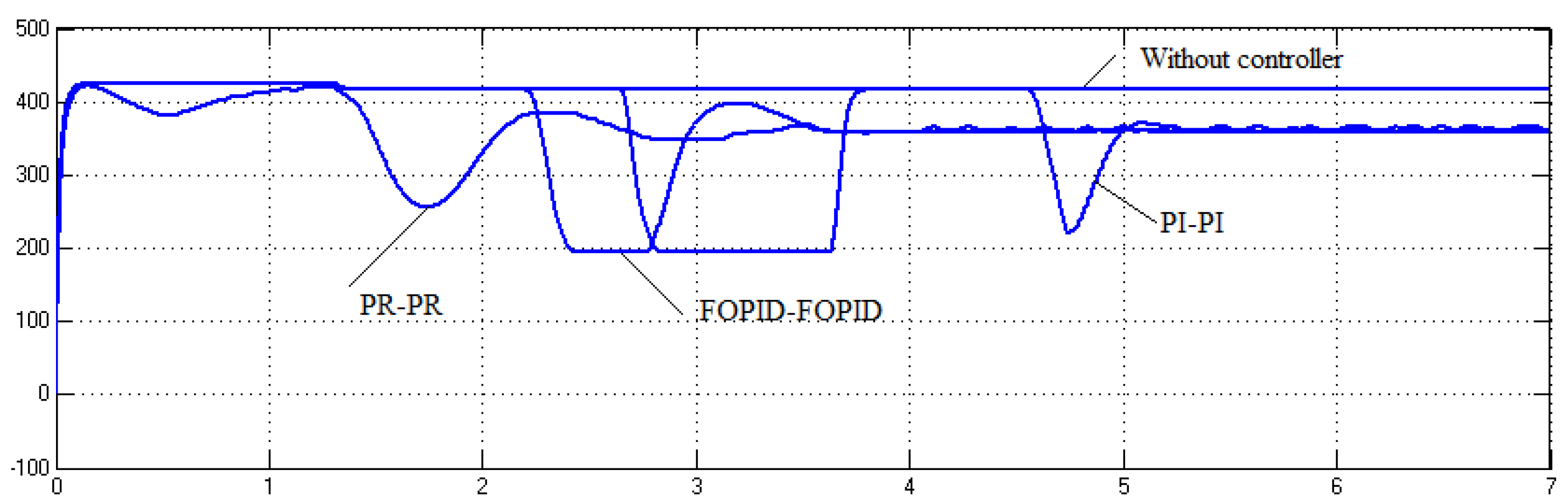
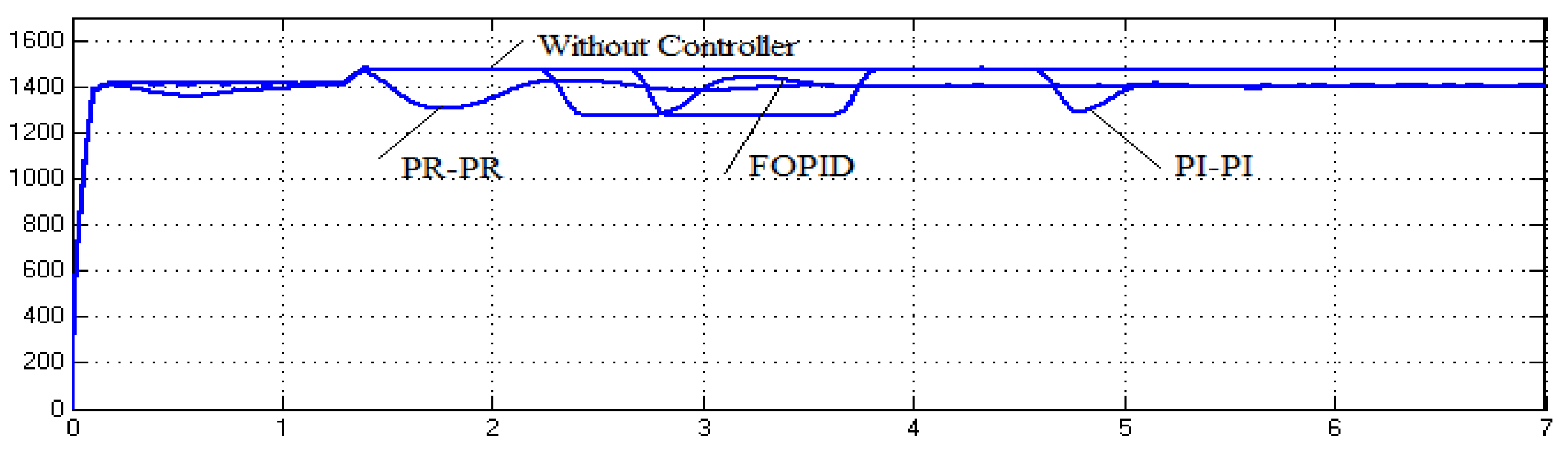
4.3. Closed Loop SC-QBC-TPI Fed PMSM with Load
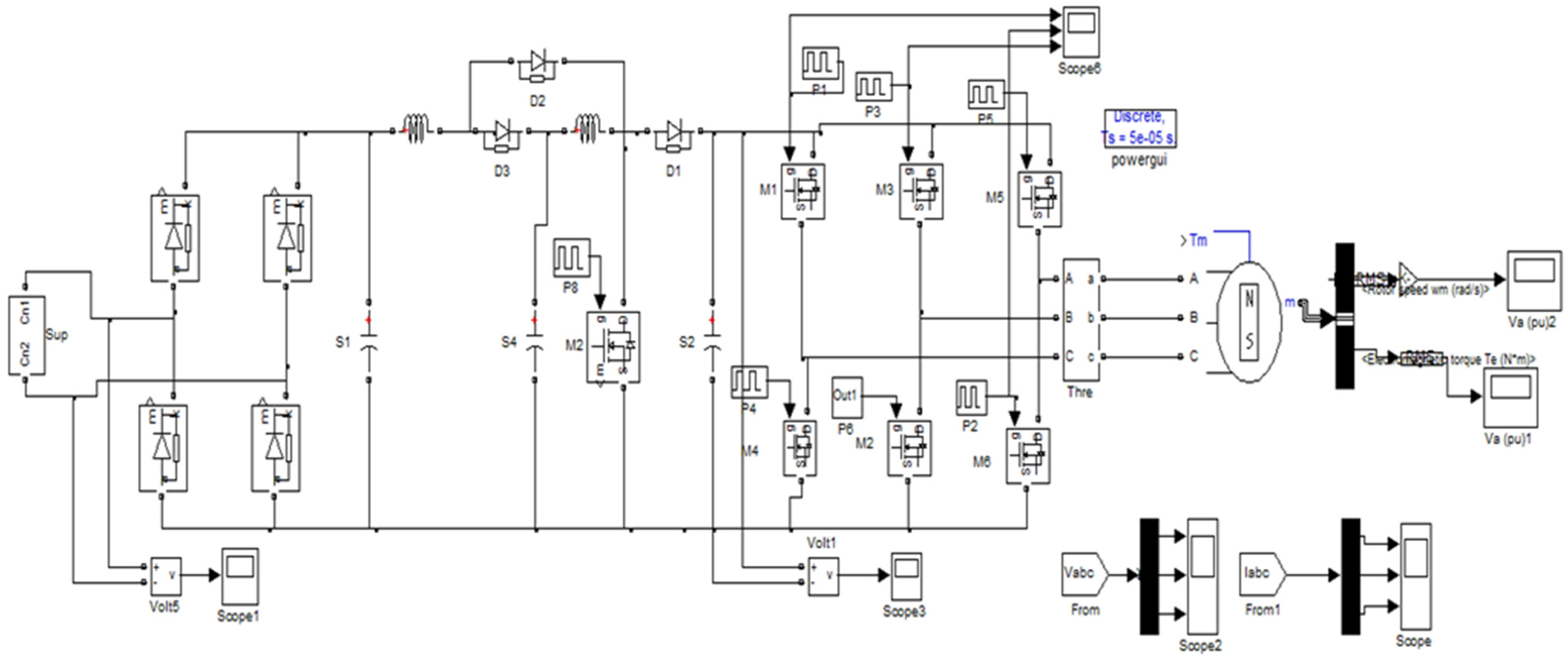
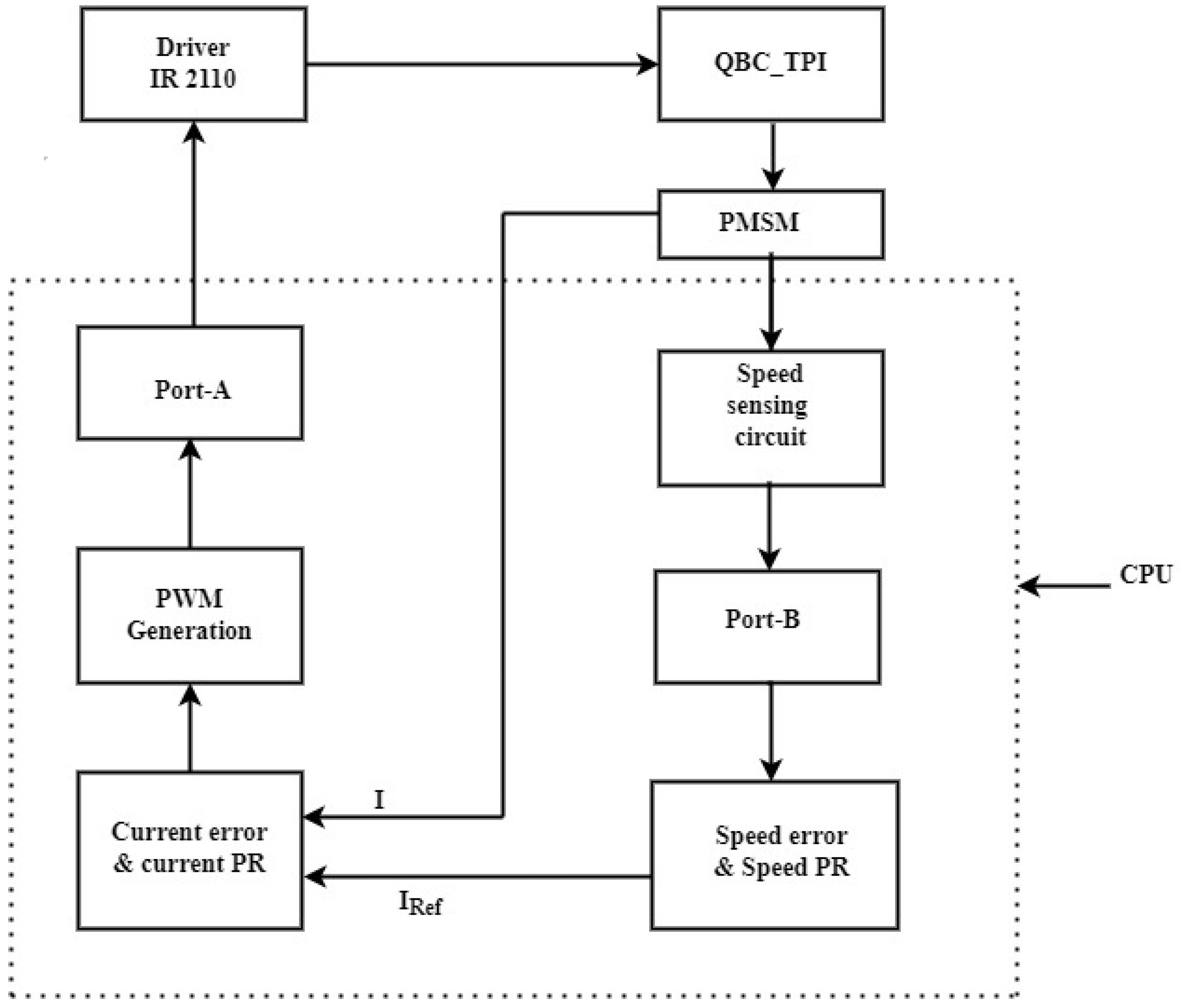
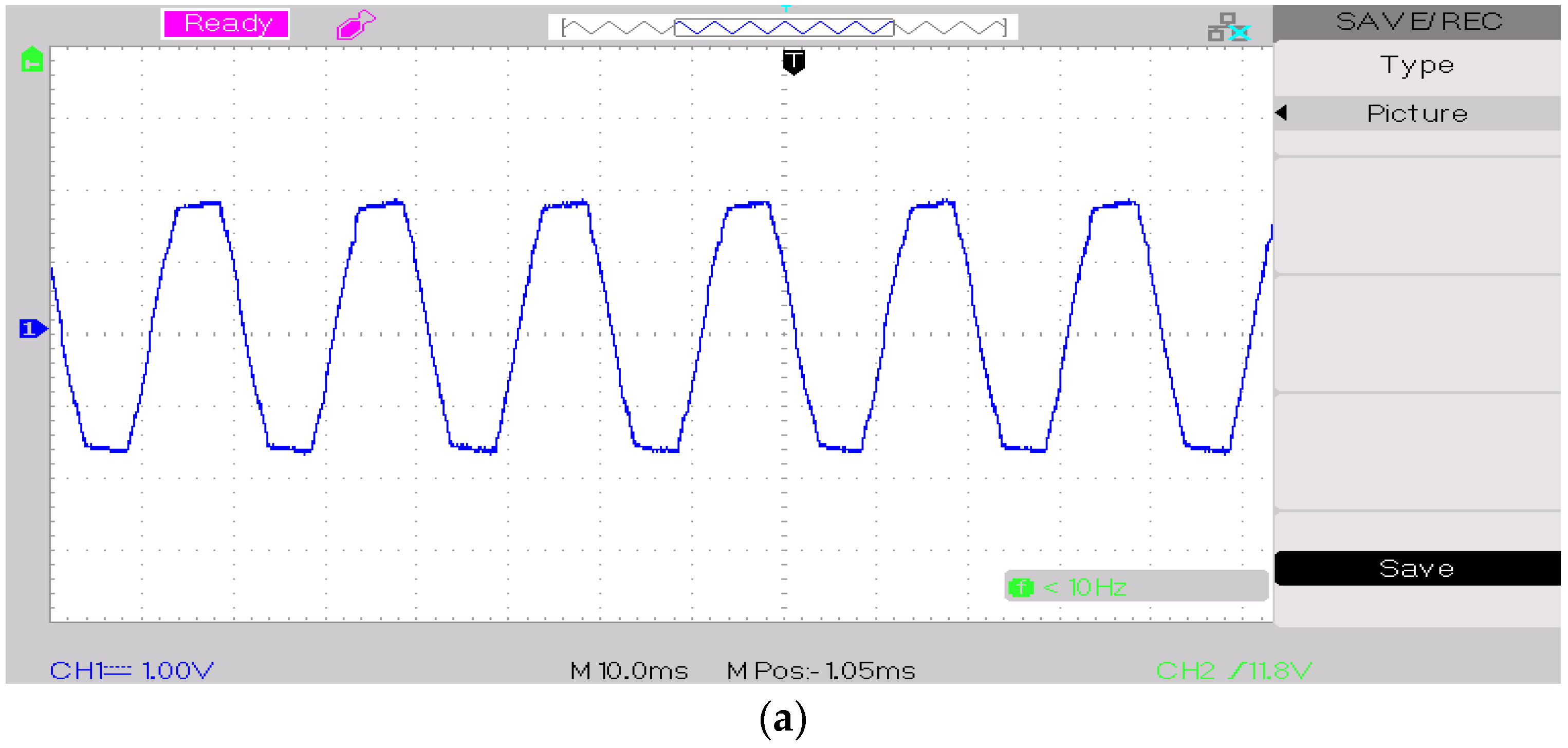
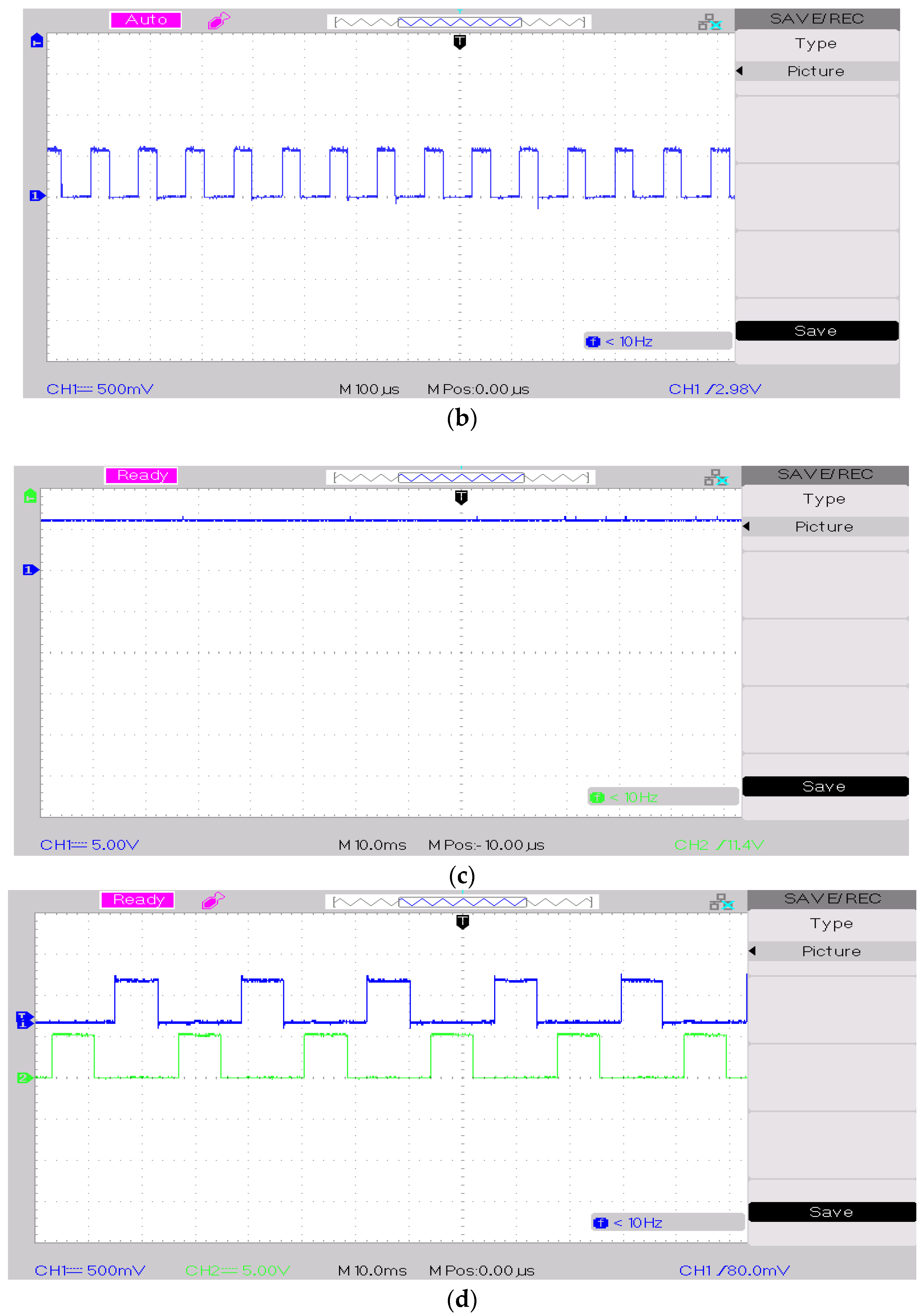
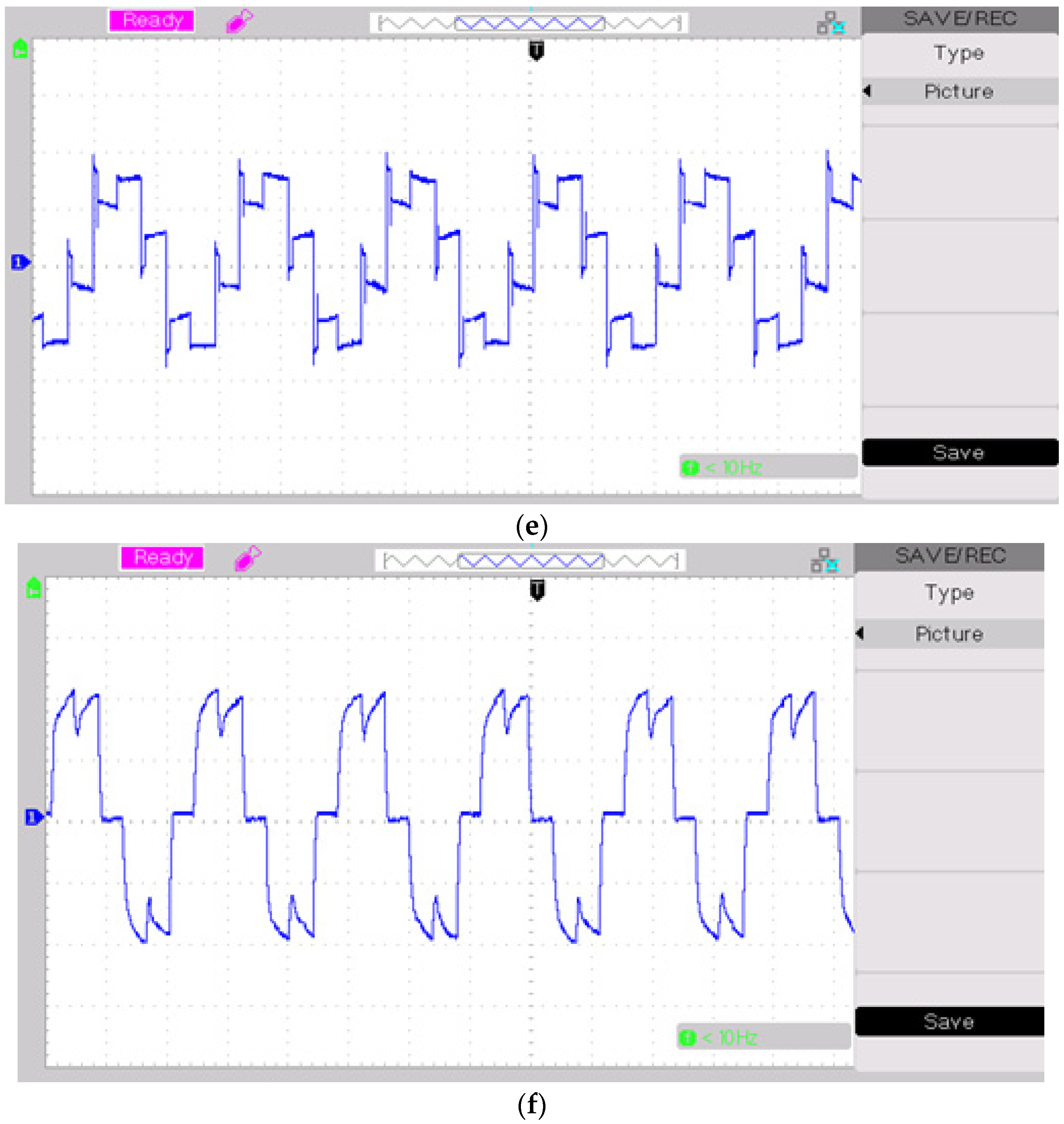
5. Experimental Module of SC-QBC-TPI-PMSM
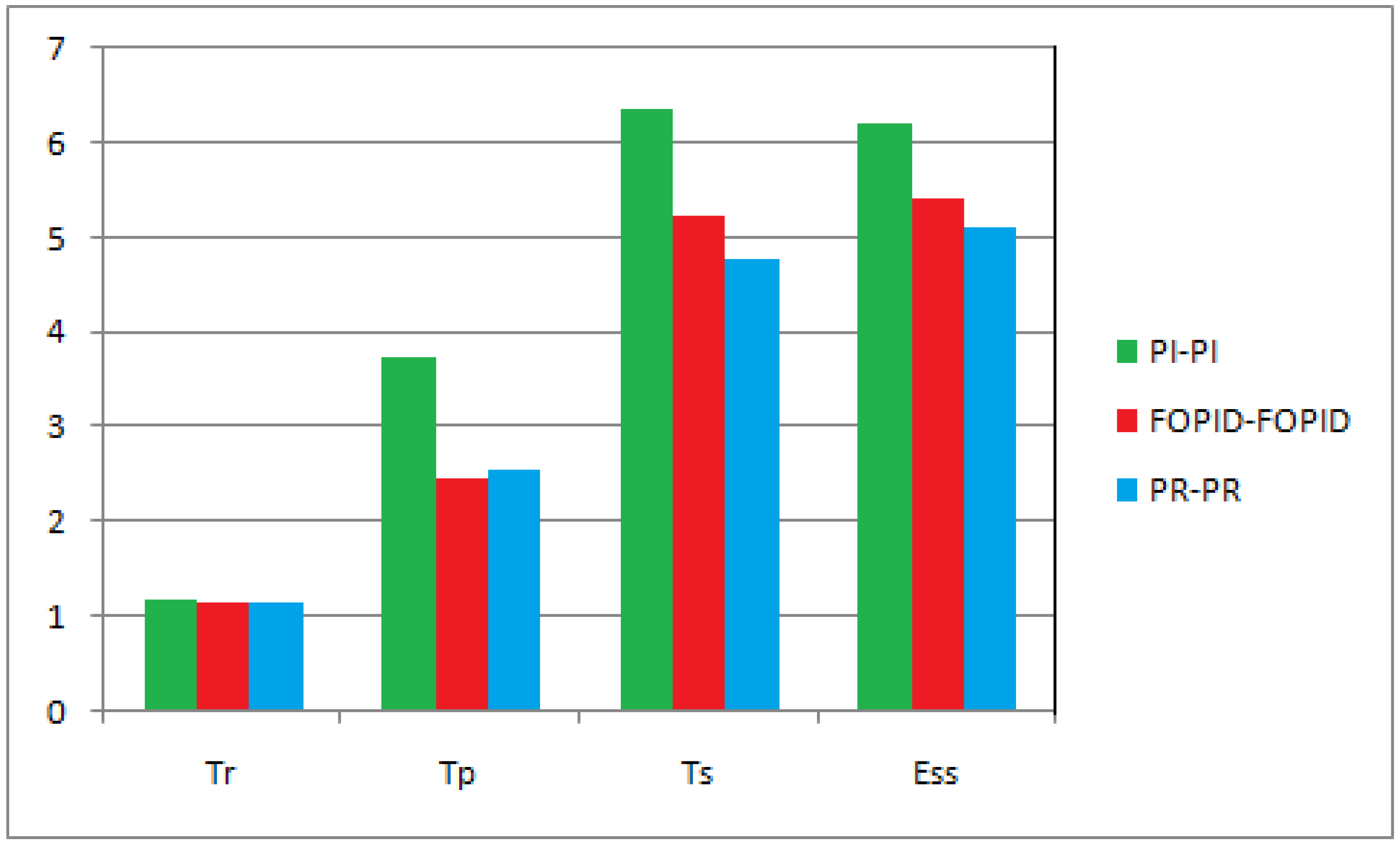
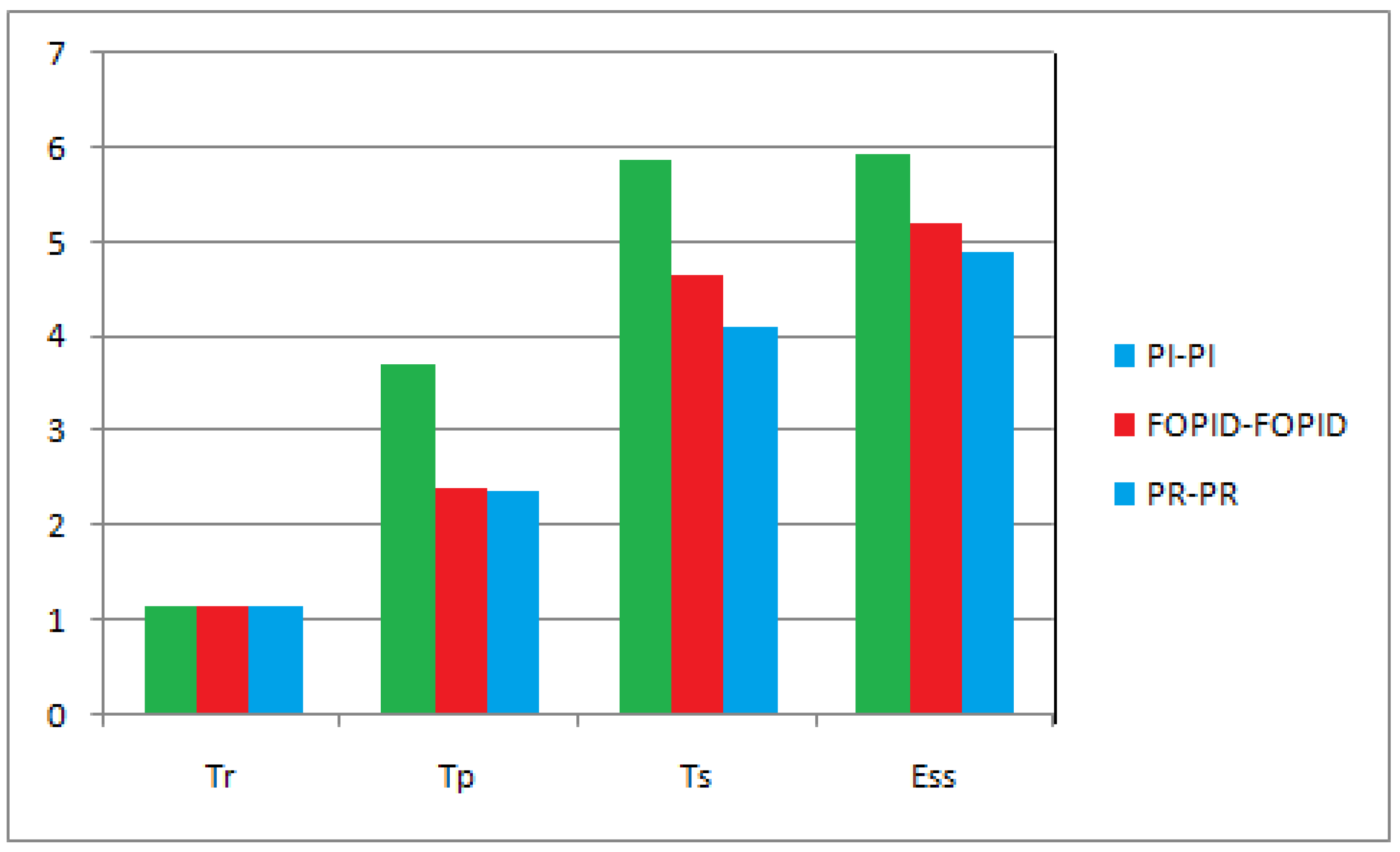
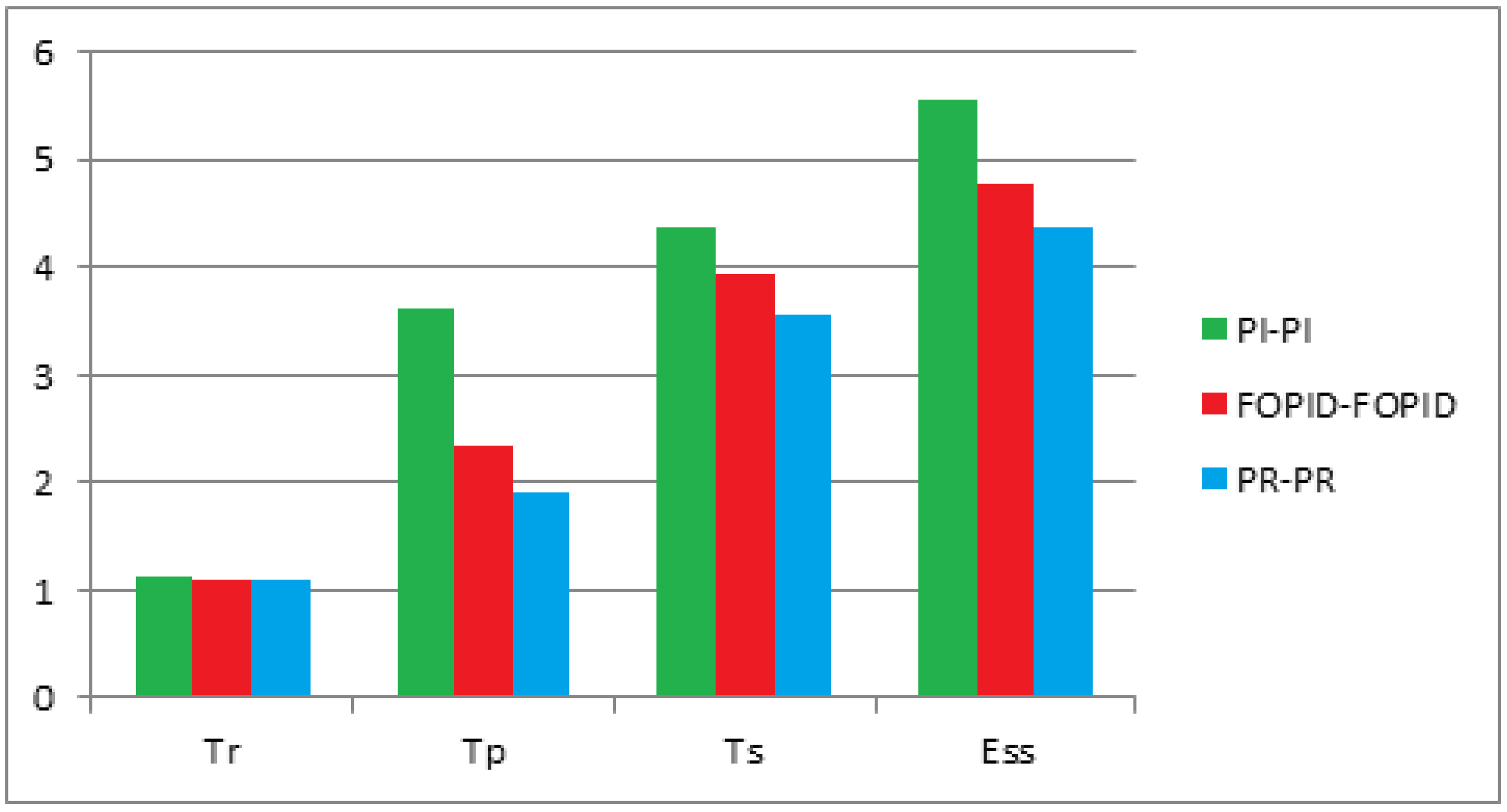
6. Comparative Analysis
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Raju, K.; Elavarasan, R.M.; Mihet-Popa, L. An Assessment of Onshore and Offshore Wind Energy Potential in India Using Moth Flame Optimization. Energies 2020, 13, 3063. [Google Scholar]
- Subramanian, S.; Sankaralingam, C.; Elavarasan, R.M.; Vijayaraghavan, R.R.; Raju, K.; Mihet-Popa, L. An Evaluation on Wind Energy Potential Using Multi-Objective Optimization-Based Non-Dominated Sorting Genetic Algorithm III. Sustainability 2021, 13, 410. [Google Scholar] [CrossRef]
- Venkatesan, C.; Kannadasan, R.; Ravikumar, D.; Loganathan, V.; Alsharif, M.H.; Choi, D.; Hong, J.; Geem, Z.W. Re-Allocation of Distributed Generations Using Available Renewable Potential Based Multi-Criterion-Multi-Objective Hybrid Technique. Sustainability 2021, 13, 13709. [Google Scholar] [CrossRef]
- Anthony, M.; Prasad, V.; Raju, K.; Alsharif, M.H.; Geem, Z.W.; Hong, J. Design of Rotor Blades for Vertical Axis Wind Turbine with Wind Flow Modifier for LowWind Profile Areas. Sustainability 2020, 12, 8050. [Google Scholar] [CrossRef]
- Elavarasan, R.M.; Selvamanohar, L.; Raju, K.; Vijayaraghavan, R.R.; Subburaj, R.; Nurunnabi, M.; Khan, I.A.; Afridhis, S.; Hariharan, A.; Pugazhendhi, R.; et al. A Holistic Review of the Present and Future Drivers of the Renewable Energy Mix in Maharashtra, State of India. Sustainability 2020, 12, 6596. [Google Scholar] [CrossRef]
- Venkatesan, C.; Kannadasan, R.; Alsharif, M.H.; Kim, M.-K.; Nebhen, J. Assessment and Integration of Renewable Energy Resources Installations with Reactive Power Compensator in Indian Utility Power System Network. Electronics 2021, 10, 912. [Google Scholar] [CrossRef]
- Rajalakshmi, M.; Chandramohan, S.; Kannadasan, R.; Alsharif, M.H.; Kim, M.-K.; Nebhen, J. Design and Validation of BAT Algorithm-Based Photovoltaic System Using Simplified High Gain Quasi Boost Inverter. Energies 2021, 14, 1086. [Google Scholar] [CrossRef]
- Sferlazza, A.; Albea-Sanchez, C.; Garcia, G. A hybrid control strategy for quadratic boost converters with inductor currents estimation. Control Eng. Pract. 2020, 103, 104602. [Google Scholar] [CrossRef]
- Wu, G.; Huang, S.; Wu, Q.; Rong, F.; Zhang, C.; Liao, W. Robust Predictive Torque Control of N*3-Phase PMSM for High-Power Traction Application. IEEE Trans. Power Electron. 2020, 35, 10799–10809. [Google Scholar] [CrossRef]
- Sivaprakasam, A. A new approach to reduce torque ripple and noise in twelve sector based direct torque controller fed permanent magnet synchronous motor drive: Simulation and experimental results. Noise Control Eng. J. 2017, 65, 531–548. [Google Scholar] [CrossRef]
- Sivaprakasam, A.; Manigandan, T. An alternative scheme to reduce torque ripple and mechanical vibration in direct torque controlled permanent magnet synchronous motor. J. Vib. Control 2013, 21, 855–871. [Google Scholar] [CrossRef]
- Sivaprakasam, A.; Ramya, L.N. A new approach to minimize torque ripple and noise in model predictive control of permanent magnet synchronous motor drives. J. Vib. Control 2020, 27, 879–892. [Google Scholar] [CrossRef]
- Sivaprakasam, A.; Anunciya, J.D. A Survey on Matrix Converter fed Direct Torque Control Techniques for AC Machines. IETE J. Res. 2019, 68, 42–58. [Google Scholar] [CrossRef]
- Li, S.; Xie, W.; Ma-Smedley, K. A Family of an Automatic Interleaved Dickson Switched-capacitor Converter and Its ZVS Resonant Configuration on figuration. IEEE Trans. Ind. Electron. 2019, 6, 255–264. [Google Scholar] [CrossRef]
- Tang, Y.; Wang, T. Study of an Improved Dual Dual-Switch Converter with Passive Lossless Clamping. IEEE Trans. Ind. Electron. 2015, 62, 972–981. [Google Scholar] [CrossRef]
- Tang, Y.; Fu, D.; Wang, T.; Xu, Z. Hybrid Switched Switched-Inductor Converters for High Step Step-Up Conversion on version. IEEE Trans. Ind. Electron. 2014, 29, 2959–2968. [Google Scholar]
- Tang, Y.; Wang, T.; He, Y. A Switched Switched-Capacitor-Based Active Active-Network Converter with High Voltage Gain. IEEE Trans. Power Electron. 2014, 30, 5413–5424. [Google Scholar]
- Mirzaee, A.; Arab Ansari, S.; Shokrollahi Moghani, J. Single switch quadratic boost converter with continuous input current for high voltage applications. Int. J. Circ. Theor. Appl. 2020, 48, 587–602. [Google Scholar] [CrossRef]
- Khan, M.A.; Ahmed, A.; Husain, I.; Sozer, Y.; Badawy, M. Performance Analysis of Bi-directional DC-DC Converters for Electric Vehicles. IEEE Trans. Ind. Appl. 2015, 51, 3442–3452. [Google Scholar] [CrossRef]
- Lopez-Santos, O.; Mayo-Maldonado, J.C.; Rosas-Caro, J.C.; Valdez-Resendiz, J.E.; Zambrano-Prada, D.A.; Ruiz-Martinez, O.F. Quadratic boost converter with low-output voltage ripple. IET Power Electron. 2020, 13, 1605–1612. [Google Scholar] [CrossRef]
- Quraan, M.; Yeo, T.; Tricoli, P. Design and Control of Modular Multilevel Converters for Battery Electric Vehicles. IEEE Trans. Power Electron. 2015, 31, 507–517. [Google Scholar] [CrossRef]
- Ahmad, J.; Zaid, M.; Sarwar, A.; Tariq, M.; Sarwer, Z. A New Transformerless Quadratic Boost Converter with High Voltage Gain. Smart Sci. 2020, 8, 163–183. [Google Scholar] [CrossRef]
- Hariri, R.; Sebaaly, F.; Kanaan, H.Y. A Review on Modular Multilevel Converters in Electric Vehicles. In Proceedings of the IECON 2020 the 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18–21 October 2020. [Google Scholar] [CrossRef]
- Badawy, M.O.; Sharma, M.; Hernandez, C.; Elrayyah, A.; Guerra, S.; Coe, J. Model Predictive Control for Multi-Port Modular Multilevel Converters in Electric Vehicles Enabling HESDs. IEEE Trans. Energy Convers. 2021, 37, 10–23. [Google Scholar] [CrossRef]
- Hu, R.; Zeng, J.; Liu, J.; Guo, Z.; Yang, N. An Ultrahigh step-up Quadratic boost converter base on Coupled-inductor. IEEE Trans. Power Electron. 2020, 35, 13200–13209. [Google Scholar] [CrossRef]
- Kumar, K.; Tiwari, R.; Varaprasad, P.V.; Babu, C.; Reddy, K.J. Performance evaluation of fuel cell fed electric vehicle system with reconfigured quadratic boost converter. Int. J. Hydrogen Energy 2021, 46, 8167–8178. [Google Scholar] [CrossRef]
- Srinivasan, S.; Tiwari, R.; Krishnamoorthy, M.; Lalitha, M.P.; Raj, K.K. Neural network based MPPT control with reconfigured quadratic boost converter for fuel cell application. Int. J. Hydrogen Energy 2021, 46, 6709–6719. [Google Scholar] [CrossRef]
- Rezaie, M.; Abbasi, V. Effective combination of quadratic boost converter with voltage multiplier cell to increase voltage gain. IET Power Electron. 2020, 13, 2322–2333. [Google Scholar] [CrossRef]
- Wang, Y.; Qiu, Y.; Bian, Q.; Guan, Y.; Xu, D. A Single Switch Quadratic Boost High Step up DC-DC Converter. IEEE Trans. Ind. Electron. 2018, 66, 4387–4397. [Google Scholar] [CrossRef]
- Saleh, S.A.; Ahshan, R.; Al-Durra, A. Developing and Testing Model Predictive Control to Minimize Ground Potentials in Transformerless Interconnected Five-Level Power Electronic Converters. IEEE Trans. Ind. Appl. 2021, 57, 3500–3510. [Google Scholar] [CrossRef]
- Li, G.; Jin, X.; Chen, X.; Mu, X. A Novel Quadratic Boost Converter with Low Inductor Currents. CPSS Trans. Power Electron. Appl. 2020, 5, 1–10. [Google Scholar] [CrossRef]
- Li, L.; Xiao, J.; Zhao, Y.; Liu, K.; Peng, X.; Luan, H.; Li, K. Robust position anti-interference control for PMSM servo system with uncertain disturbance. CES Trans. Electr. Mach. Syst. 2020, 4, 151–160. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. No. | Authors | Year | Methodologies | Applications | Description of the Work |
|---|---|---|---|---|---|
| [18] | Afshin Mirzaee et al. | 2019 | Single switch QBC | Renewable energy and high voltage requirements |
|
| [19] | Mehnaz Akhter et al. | 2015 | Cascaded Buck-Boost-Capacitor in themiddle (CBB-CIM) and Cascaded Buck-Boost-Inductorin the middle (CBB-IIM) | Electric Vehicle |
|
| [20] | Oswaldo Lopez-Santos et al. | 2019 | Non-isolated QBC | High-voltage gains for renewable resources |
|
| [21] | Mahran Quraan et al. | 2015 | Modular MultilevelConverters | Battery Electric Vehicles |
|
| [22] | Javed Ahmad et al. | 2020 | Transformerless QBC | Low and medium power applications |
|
| [23] | Raghda Hariri et al. | 2020 | Modular Multilevel Converters | Electric Vehicles |
|
| [24] | Mohamed Badawy et al. | 2021 | Model Predictive Control (MPC) | Electric Vehicles |
|
| [25] | Renjun Hu et al. | 2020 | Coupled-inductor QBC | Voltage doubler requirements |
|
| [26] | K. Kumar et al. | 2021 | Neural network-based QBC | Electric vehicle applications |
|
| [27] | Suresh Srinivasan et al. | 2022 | Neural network-based QBC | Fuel cell |
|
| [28] | Milad Rezaie et al. | 2019 | QBC with multiplier cell | Low power application |
|
| [29] | Yijie Wang et al. | 2018 | Integrated QBC and a voltage doubler | Vehicle LED drive |
|
| [30] | Saleh et al. | 2021 | Model-predictive control (MPC) | Power evacuation for Electric grid |
|
| Parameters | Expression | Values |
|---|---|---|
| Vin | C1 | L1 | C2 | L2 | C3 | MOSFET(IRF840) | DIODE | Vo |
|---|---|---|---|---|---|---|---|---|
| 200 V | 2200 µF | 5 µH | 1 µF | 0.2 µH | 1800 µF | 500 V/8 A | 230 V/8 A | 415 V |
| LOAD | CONTROLLER | Tr (sec) | Tp (s) | Ts (s) | Ess (RPM) |
|---|---|---|---|---|---|
| 1.2 N-m | PI-PI | 1.46 | 4.33 | 5.34 | 2.36 |
| FOPID-FOPID | 1.39 | 2.28 | 4.23 | 1.78 | |
| PR-PR | 1.36 | 2.24 | 3.45 | 1.56 | |
| 1.3 N-m | PI-PI | 1.40 | 4.20 | 5.00 | 2.23 |
| FOPID-FOPID | 1.36 | 2.14 | 4.00 | 1.69 | |
| PR-PR | 1.33 | 2.00 | 3.13 | 1.40 | |
| 1.4 N-m | PI-PI | 1.45 | 4.30 | 5.31 | 2.32 |
| FOPID-FOPID | 1.37 | 2.23 | 4.20 | 1.73 | |
| PR-PR | 1.35 | 2.22 | 3.36 | 1.50 |
| Parameter | Simulation Result | Hardware Result |
|---|---|---|
| Input Voltage | 200 V | 200 V |
| Switching frequency of QBC | 5 kHz | 5 kHz |
| Switching frequency of three Phase inverter | 10 Hz–100 Hz | 10 Hz–100 Hz |
| Inverter output Voltage | 420 V | 412 V |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bhavani, S.; Sivaprakasam, A. Dual Mode Symmetrical Proportional Resonant Controlled Quadratic Boost Converter for PMSM-Drive. Symmetry 2023, 15, 147. https://doi.org/10.3390/sym15010147
Bhavani S, Sivaprakasam A. Dual Mode Symmetrical Proportional Resonant Controlled Quadratic Boost Converter for PMSM-Drive. Symmetry. 2023; 15(1):147. https://doi.org/10.3390/sym15010147
Chicago/Turabian StyleBhavani, Somasundaram, and Arumugam Sivaprakasam. 2023. "Dual Mode Symmetrical Proportional Resonant Controlled Quadratic Boost Converter for PMSM-Drive" Symmetry 15, no. 1: 147. https://doi.org/10.3390/sym15010147
APA StyleBhavani, S., & Sivaprakasam, A. (2023). Dual Mode Symmetrical Proportional Resonant Controlled Quadratic Boost Converter for PMSM-Drive. Symmetry, 15(1), 147. https://doi.org/10.3390/sym15010147