

Considerations for Gain Selection of Feedforward Active EMI Filters
Abstract
:1. Introduction
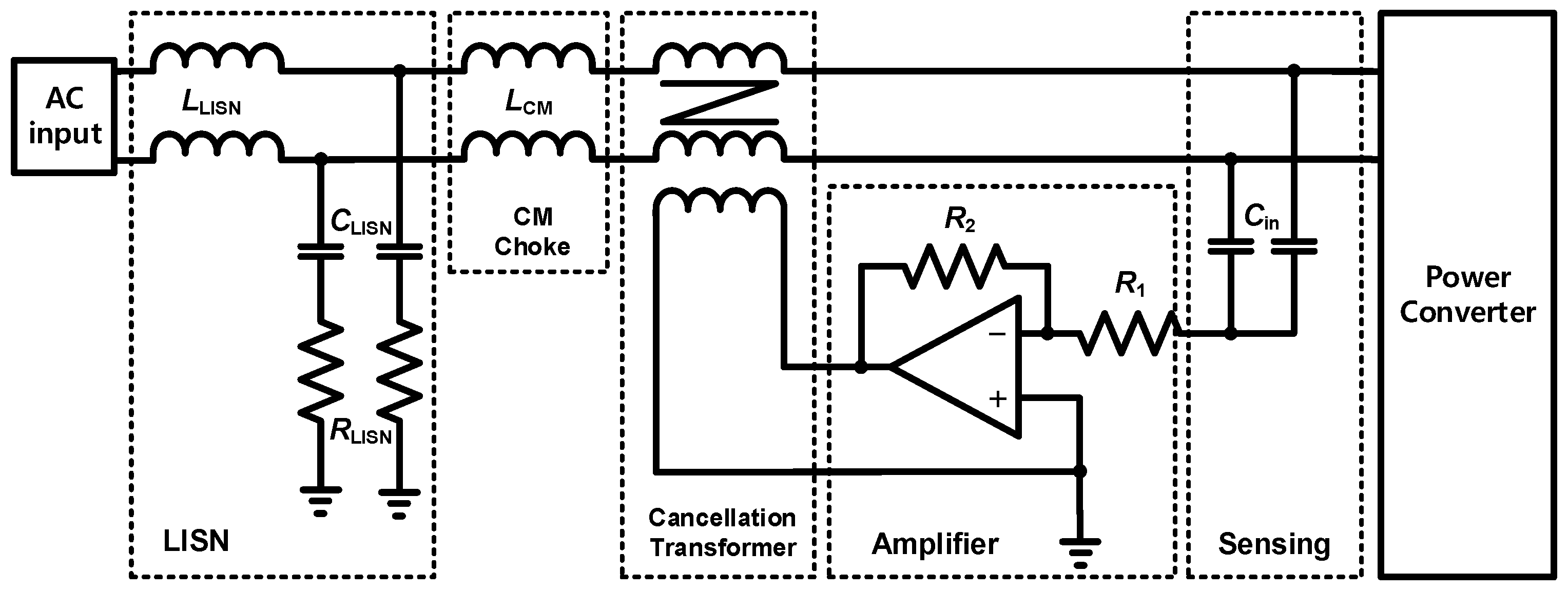
2. Structure of Active EMI Filter
3. Considerations for Gain Selection
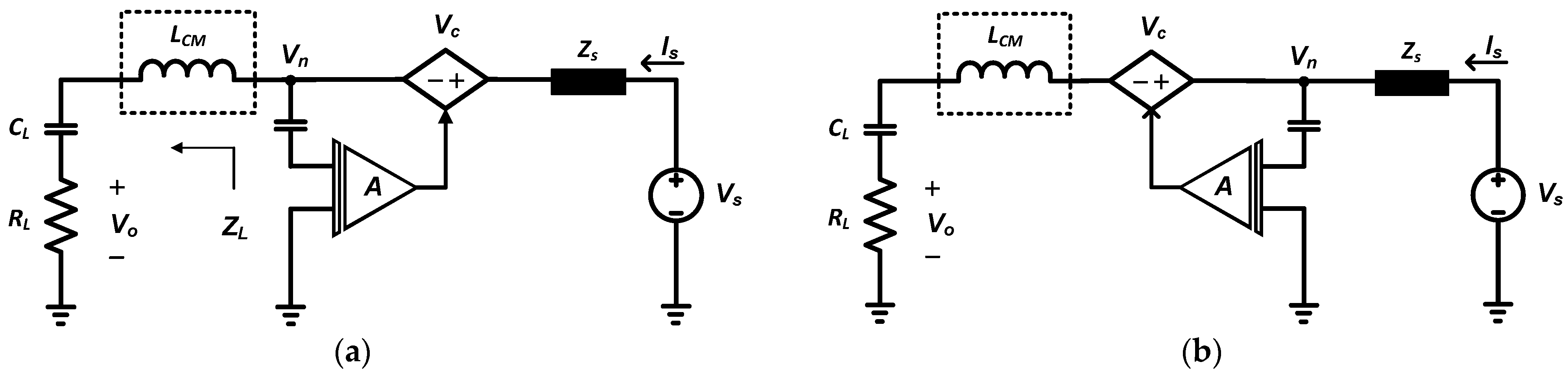
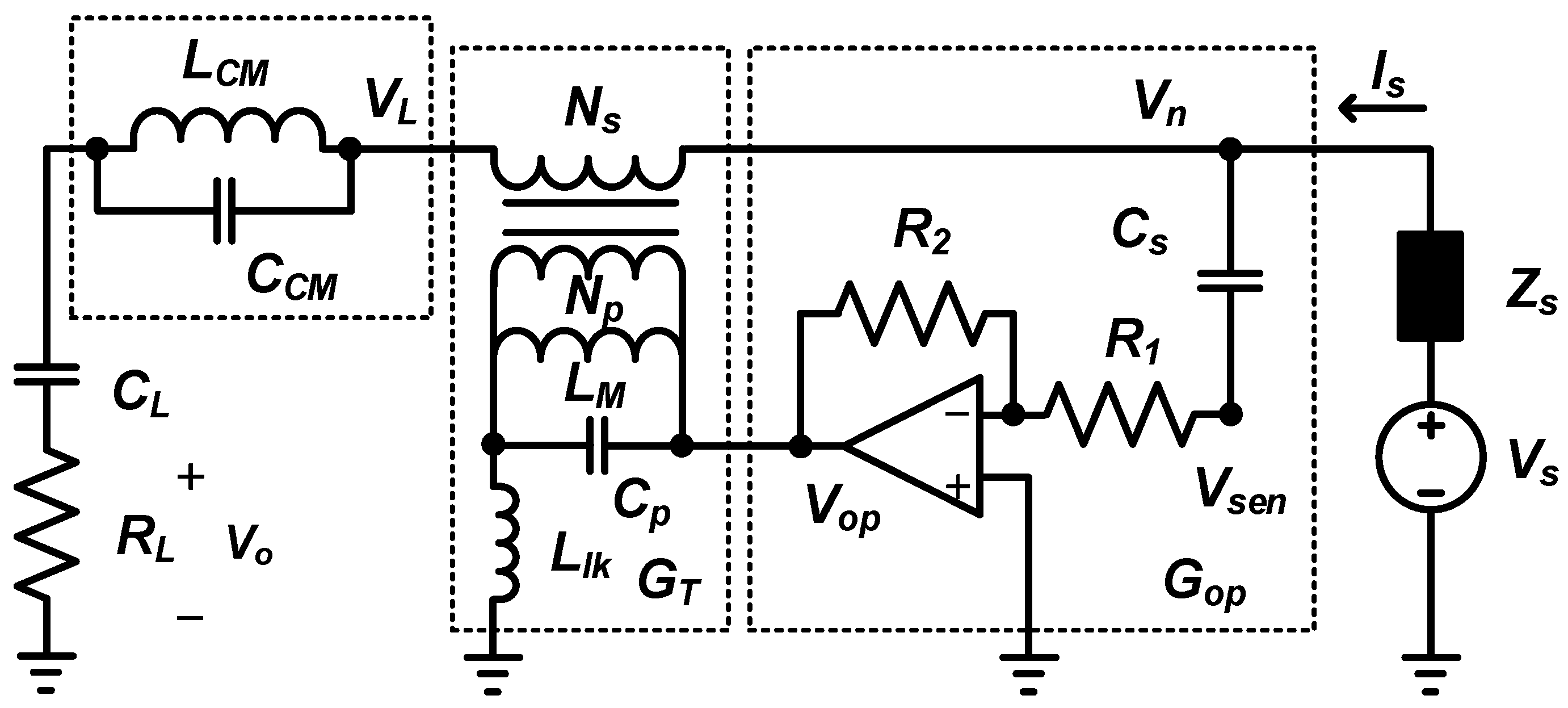
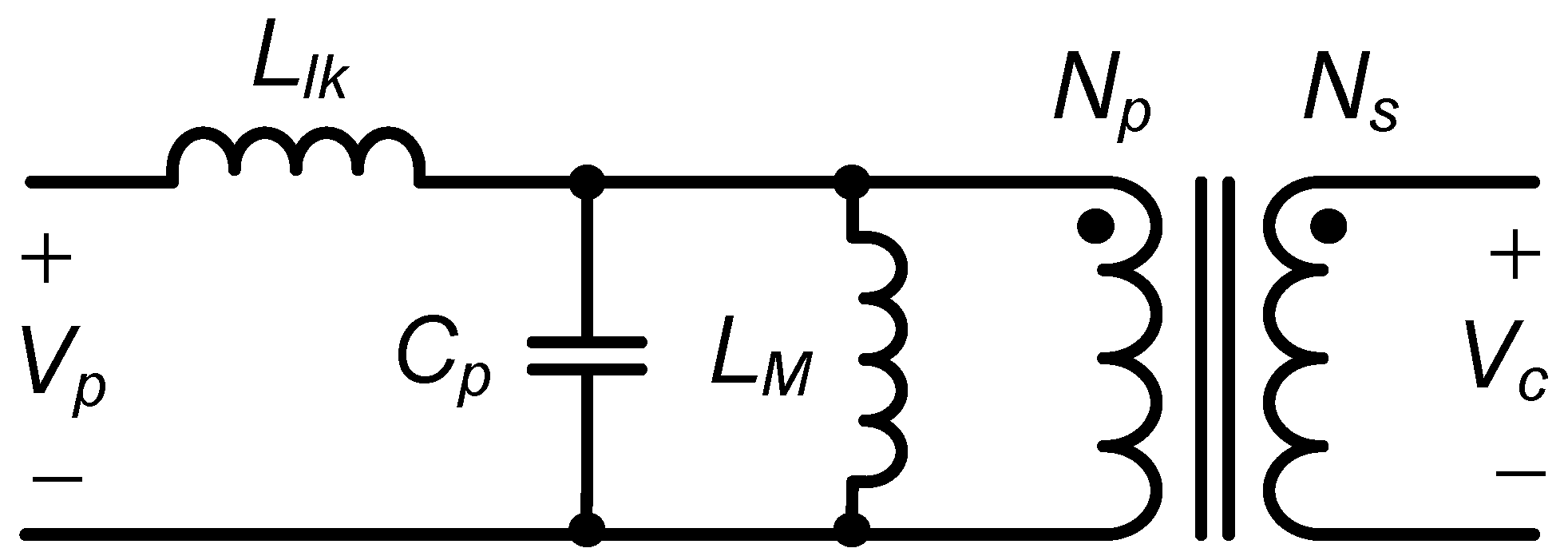
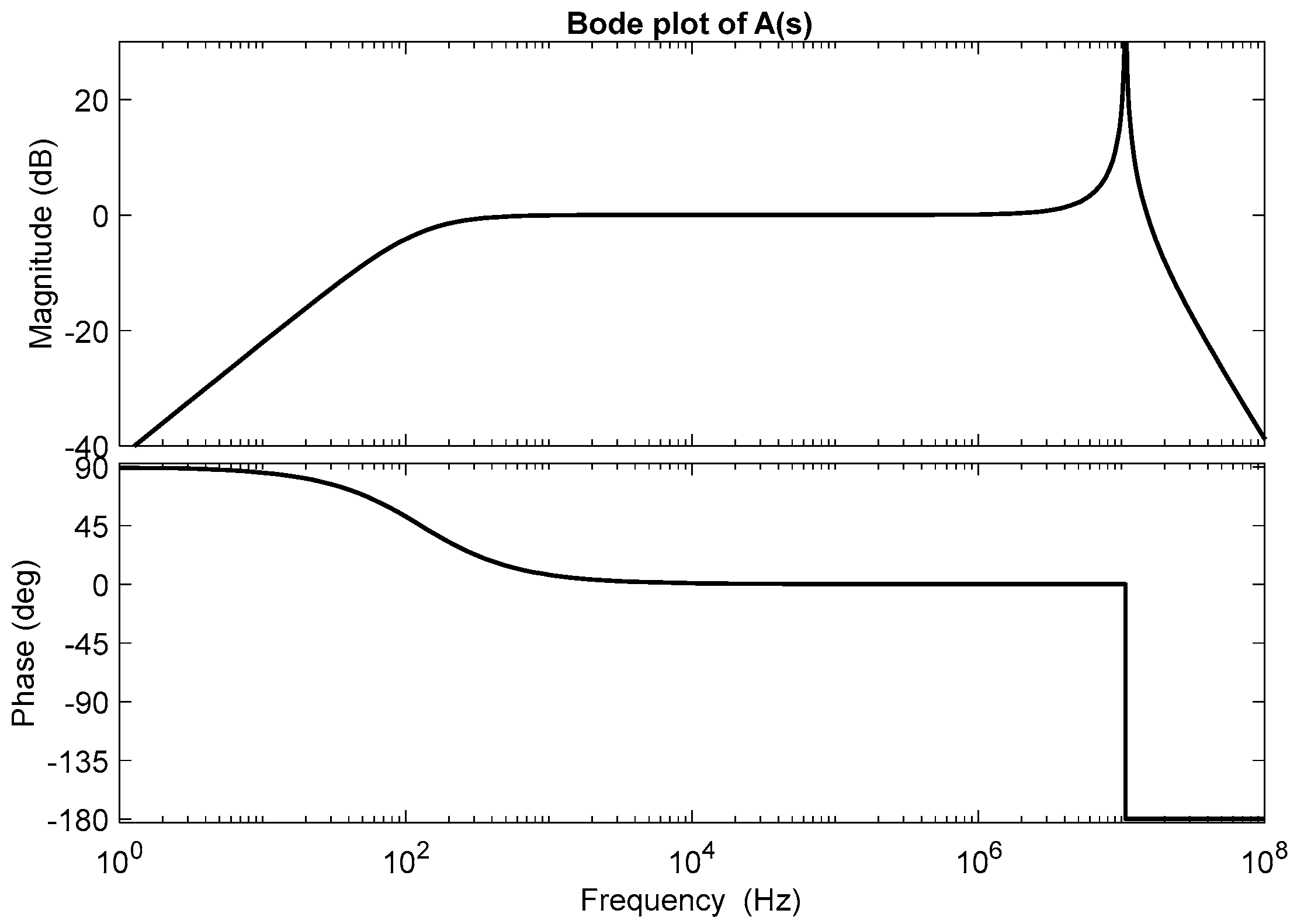
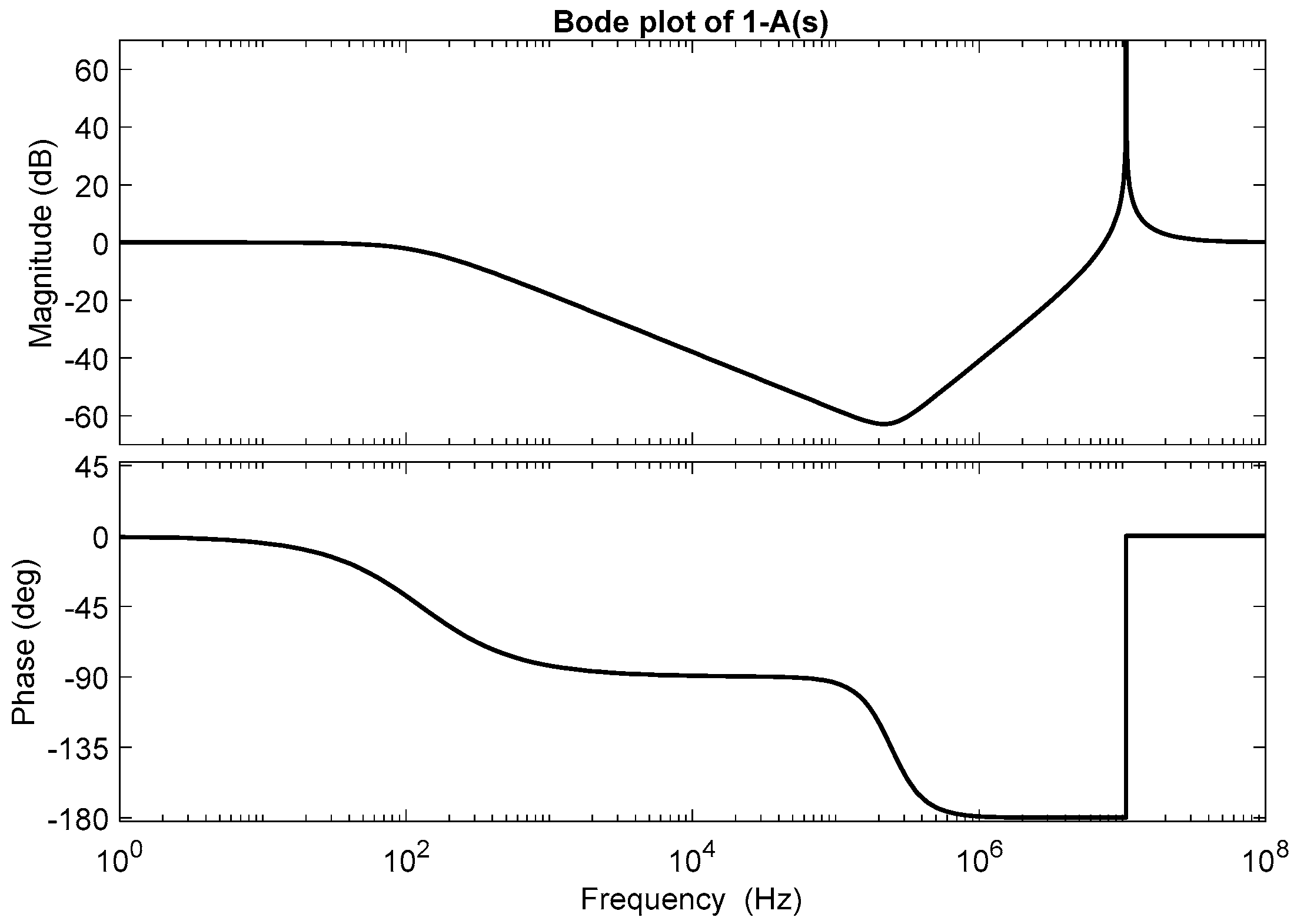
3.1. Transfer Function of Feedforward AEF
3.2. Stability Problem for the Unity AEF Gain
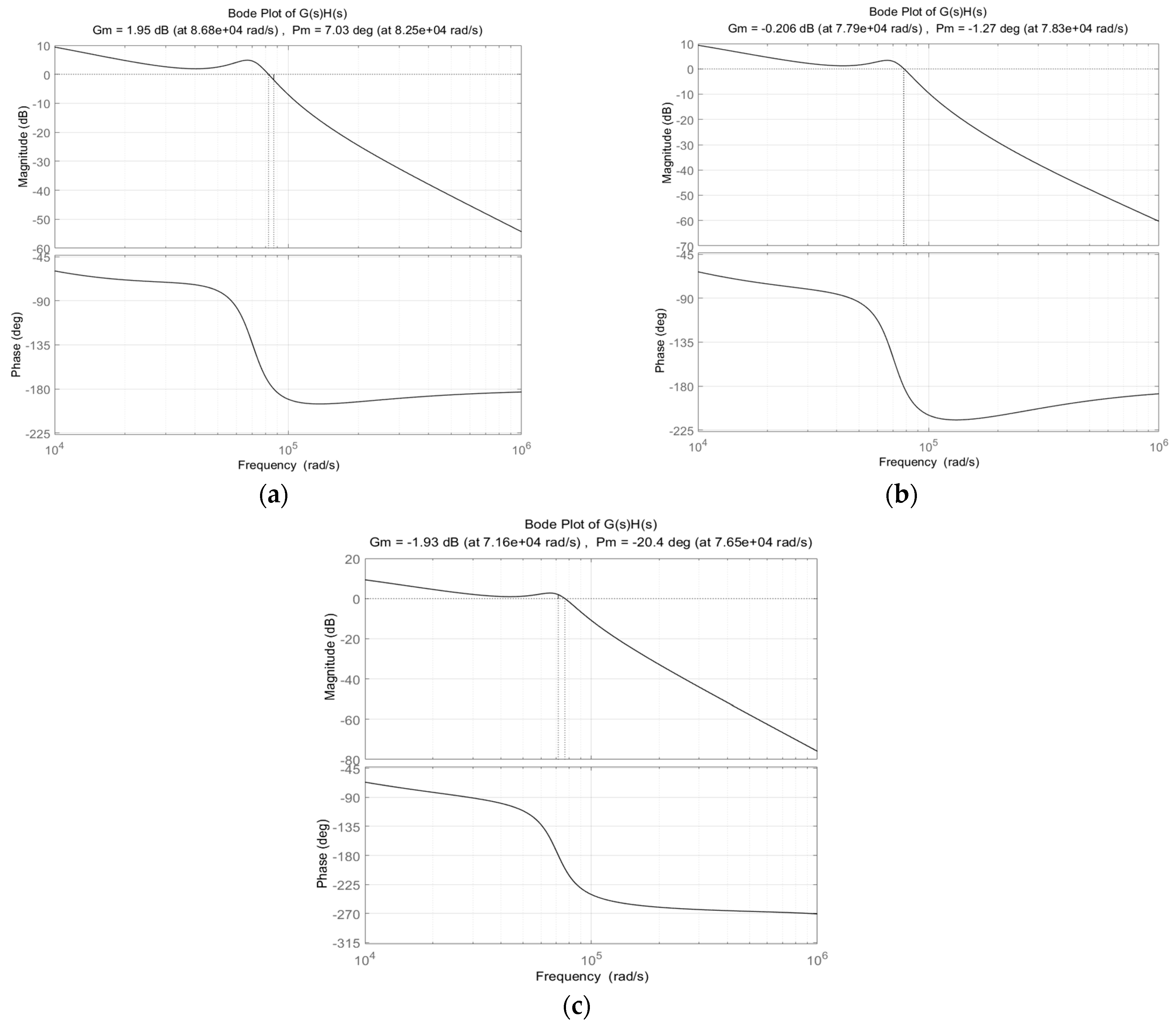
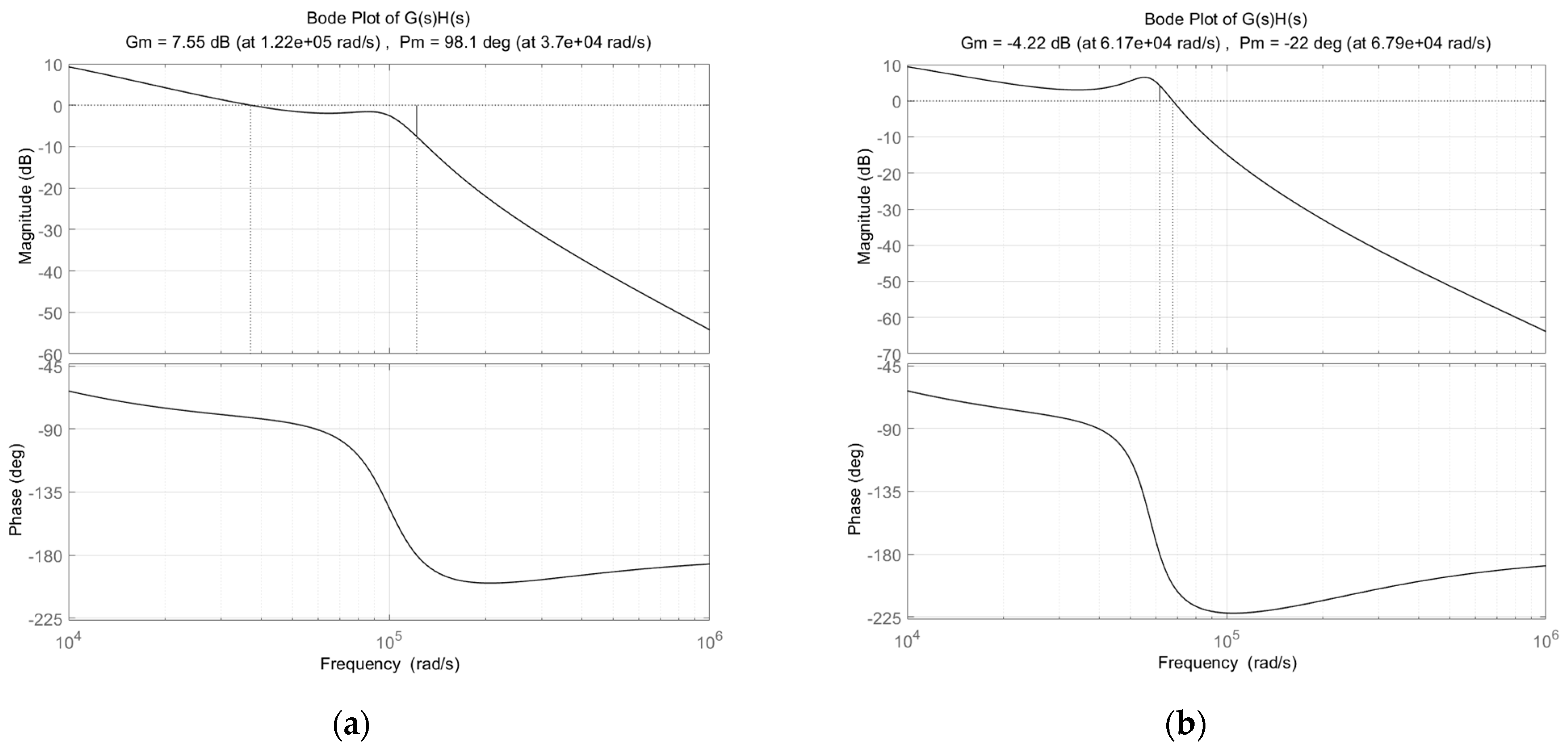
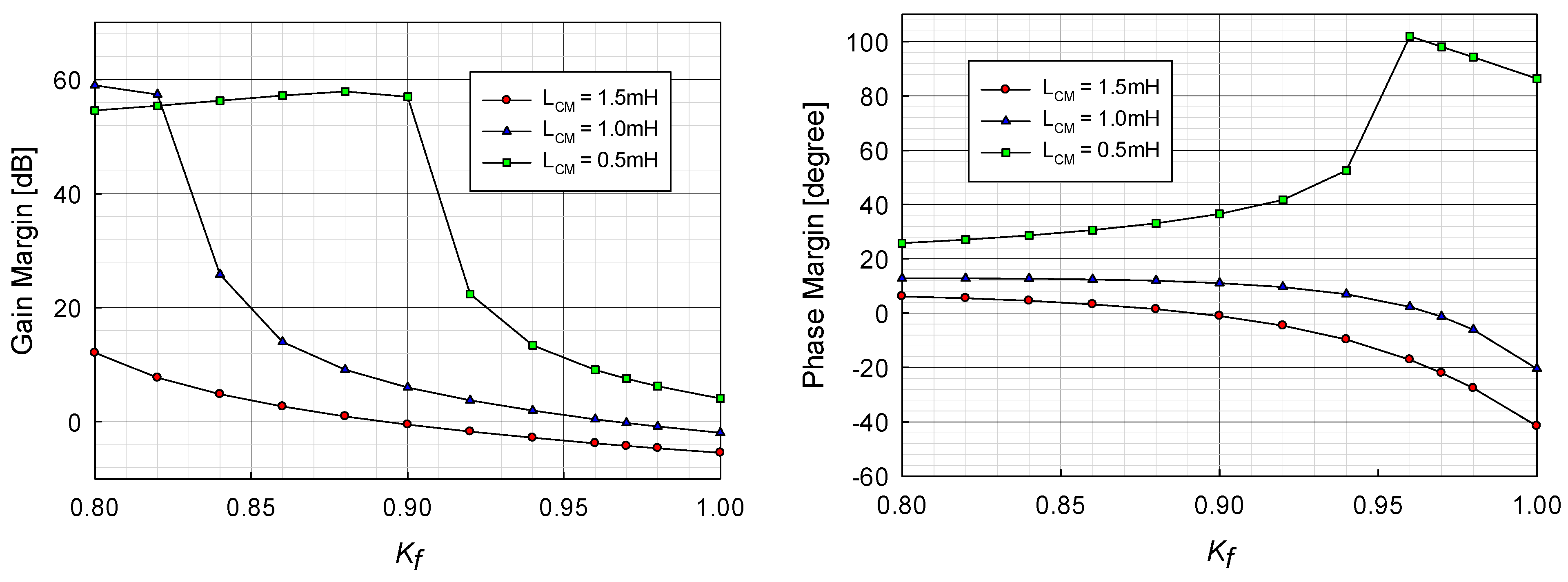
3.3. Effects of Source and Load Impedances for Stability of AEF
4. Experiments and Discussions
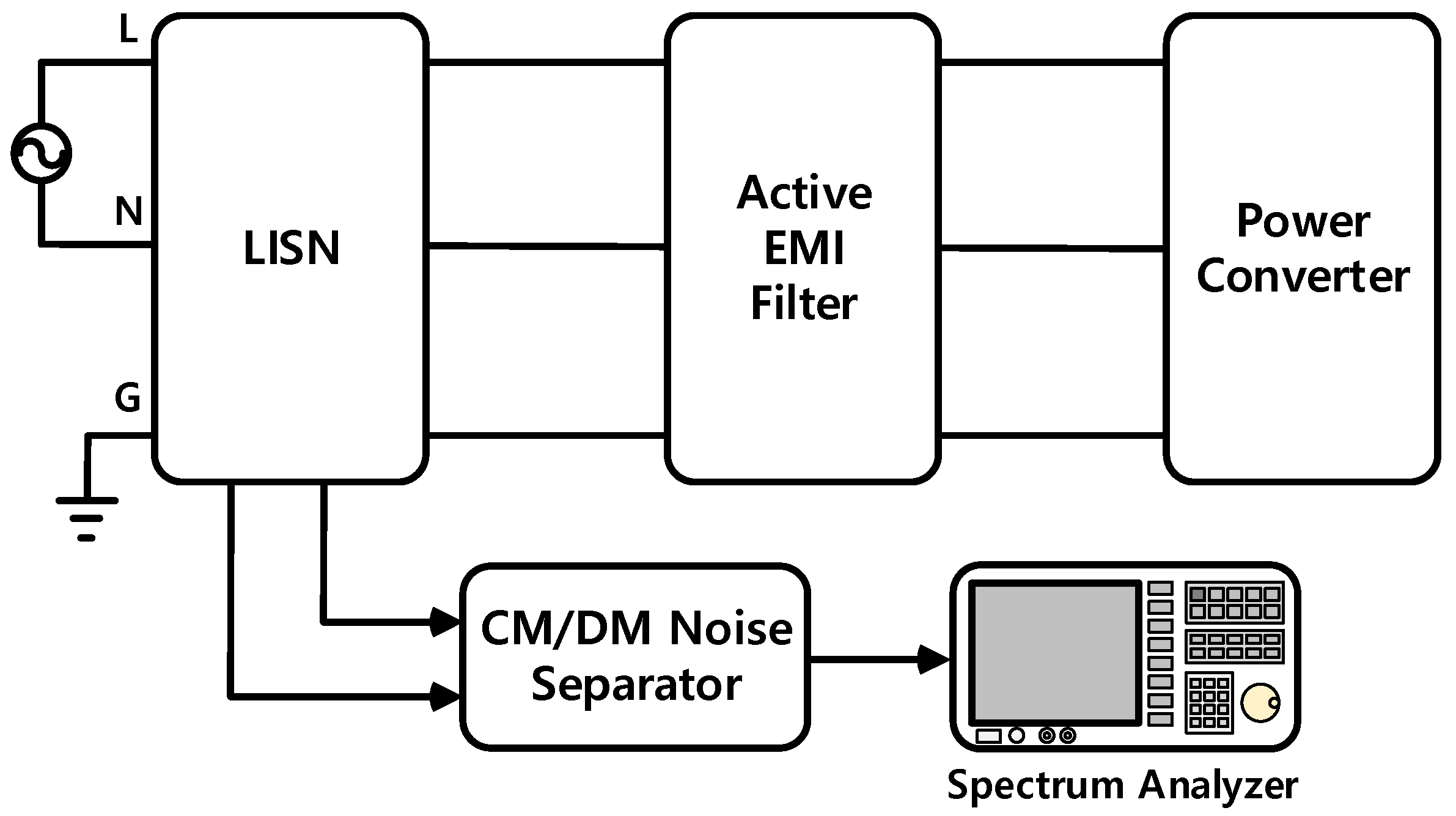
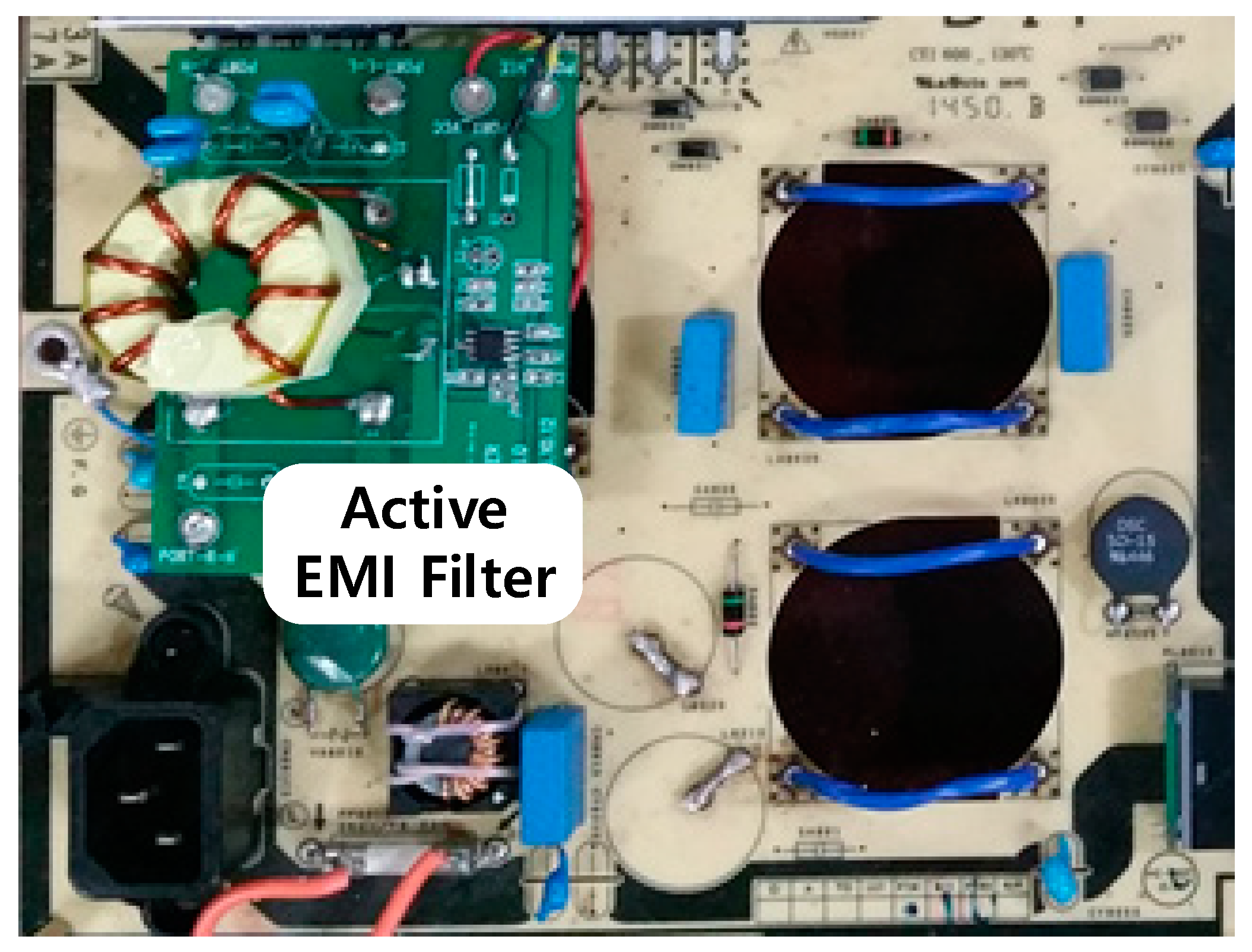
4.1. Experimental Setup
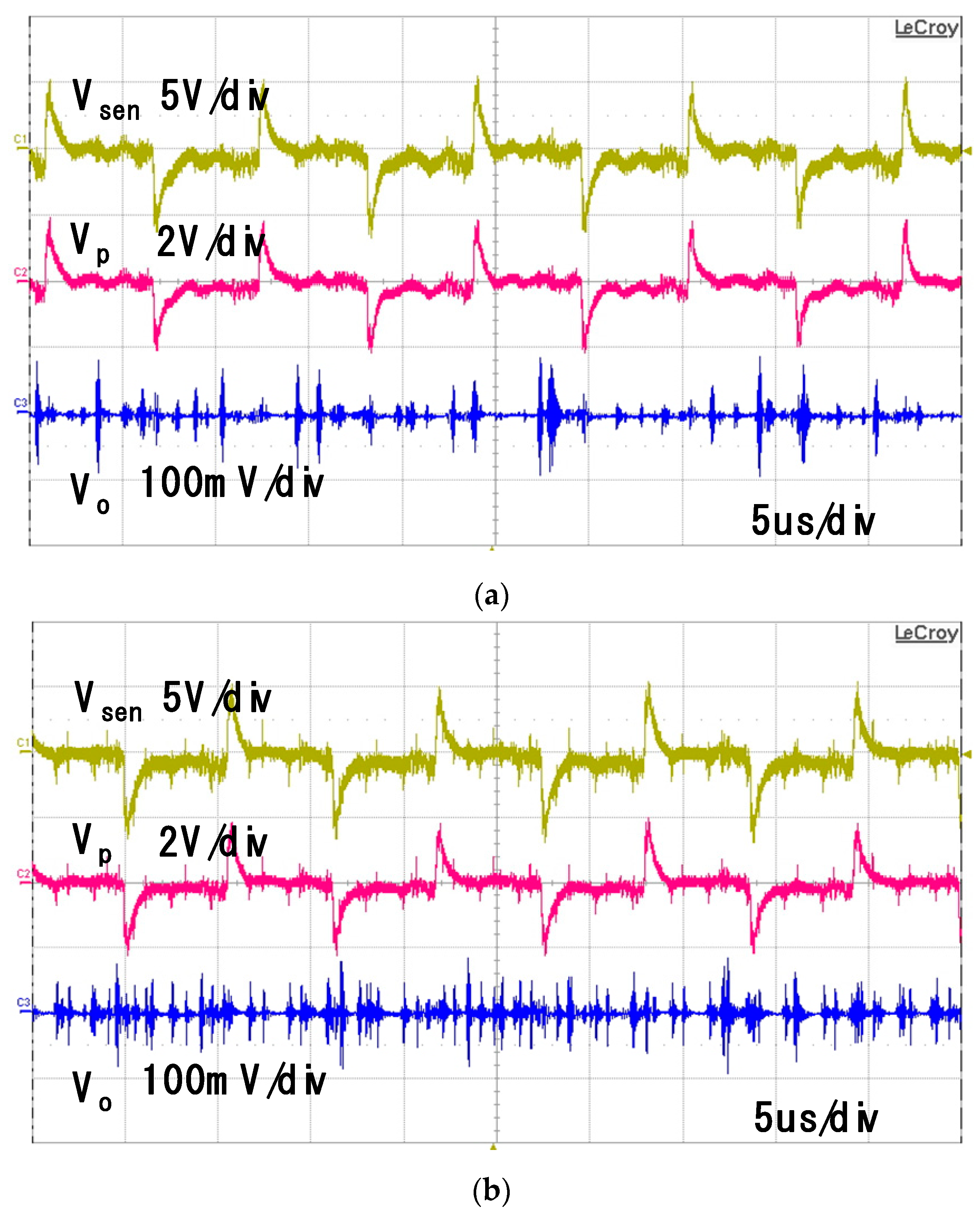
4.2. Experimental Results and Discussions
5. Conclusions
- The stability of the AEF should be checked for the given source and load impedances in selecting the gain of the AEF;
- The maximum bound of the AEF gain for the given source and load impedances can be obtained from the stability analysis performed in Section 3;
- Choosing the lower value of the CM choke can extend the maximum bound of the AEF gain guaranteeing the stable operation, but it does not provide the best AEF performance;
- The optimization between the AEF gain and CM choke is required to achieve the best performance of the AEF.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhang, B.; Wang, S. An overview of wide bandgap power semiconductor device packaging techniques for EMI reduction. In Proceedings of the IEEE Symp. on Electromagnetic Compatibility, Signal Integrity and Power Integrity, Long Beach, CA, USA, 30 July 2018. [Google Scholar]
- Han, D.; Li, S.; Wu, Y.; Choi, W.; Sarlioglu, B. Comparative analysis on conducted CM EMI emission of motor drives: WBG versus Si devices. IEEE Trans. Ind. Electron. 2017, 64, 8353–8363. [Google Scholar] [CrossRef]
- Shih, F.Y.; Chen, D.Y.; Wu, Y.P.; Chen, Y.T. A procedure for designing EMI filters for AC line applications. IEEE Trans. Power Electron. 1996, 11, 170–181. [Google Scholar] [CrossRef]
- Nagle, A.; De Doncker, R.W. Systematic design of EMI-filters for power converters. In Proceedings of the IEEE Industry Applications Conference, Rome, Italy, 8 December 2000. [Google Scholar]
- Rossetto, L.; Buso, S.; Spiazzi, G. Conducted EMI issues in a 600-W single phase boost PFC design. IEEE Trans. Ind. Applicat. 2000, 36, 578–585. [Google Scholar] [CrossRef]
- Cochrane, D.; Chen, D.; Boroyevich, D. Passive cancellation of common-mode noise in power electronic circuits. IEEE Trans. Power Electron. 2003, 18, 756–763. [Google Scholar]
- Ye, S.; Eberle, W.; Liu, Y.-F. A novel EMI filter design method for switching power supplies. IEEE Trans. Power Electron. 2004, 19, 1668–1678. [Google Scholar]
- Farkas, T.; Schlecht, M.F. Viability of active EMI filters for utility applications. IEEE Trans. Power Electron. 1994, 9, 328–337. [Google Scholar] [CrossRef]
- Son, Y.; Sul, S. A new active common-mode EMI filter for PWM inverter. IEEE Trans. Power Electron. 2003, 18, 1309–1314. [Google Scholar] [CrossRef]
- Son, Y.; Sul, S. Generalization of active filters for EMI reduction and harmonics compensation. IEEE Trans. Ind. Appl. 2006, 42, 545–551. [Google Scholar] [CrossRef]
- Chen, W.; Yang, X.; Wang, Z. An active EMI filtering technique for improving passive filter low-frequency performance. IEEE Trans. Electromagn. Compat. 2006, 48, 172–177. [Google Scholar] [CrossRef]
- Mainali, K.; Oruganti, R. Design of a current-sense voltage-feedback common mode EMI filter for an off-line power converter. In Proceedings of the 2008 IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15 June 2008. [Google Scholar]
- Hamza, D.; Jain, P.K. Conducted EMI noise mitigation in DC-DC converters using active filtering method. In Proceedings of the IEEE Power Electronics Specialists Conference, Rhodes, Greece, 15–19 June 2008. [Google Scholar]
- Chen, W.; Zhang, W.; Yang, X.; Sheng, Z.; Wang, Z. An experimental study of common- and differential-mode active EMI Filter compensation characteristics. IEEE Trans. Electromagn. Compat 2009, 51, 683–691. [Google Scholar] [CrossRef]
- Heldwein, M.L.; Ertl, H.; Biela, J.; Kolar, J.W. Implementation of a transformerless common-mode active filter for offline converter systems. IEEE Trans. Ind. Electron. 2020, 57, 1772–1786. [Google Scholar] [CrossRef]
- Hamza, D.; Sawan, M.; Jain, P.K. Suppression of common-mode input electromagnetic interference noise in DC–DC converters using the active filtering method. IET Power Electron. 2011, 4, 776–784. [Google Scholar] [CrossRef]
- Rong, Z.; Panlong, F.; Wei, D.; Rui, X. Design of active EMI filter based on virtual impedance transform method. In Proceedings of the 2nd International Symposium on Instrumentation and Measurement, Sensor Network and Automation (IMSNA), Toronto, ON, Canada, 23–24 December 2013; pp. 871–874. [Google Scholar]
- Ali, M.; Labour’e, E.; Costa, F. Integrated active filter for differential-mode noise suppression. IEEE Trans. Power Electron. 2014, 29, 1053–1057. [Google Scholar] [CrossRef]
- Lee, K.H.; Kang, B.G.; Choi, Y.H.; Chung, S.K. Design and implementation of active EMI filter for common-mode noise reduction. J. Power Electron. 2016, 16, 1236–1243. [Google Scholar] [CrossRef]
- Dai, L.; Chen, W.; Yang, Y.; Wang, R.; Yang, X. Design of active EMI filters with the integrated passive component. In Proceedings of the IEEE Applied Power Electronics Conference and Exposition (APEC), Anaheim, CA, USA, 17–21 March 2019. [Google Scholar]
- Zhang, Z.; Bazzi, A.M. Modeling, design, and implementation of a novel transformer-less feedforward-controlled active EMI filter for AC-DC power converters. In Proceedings of the IEEE Energy Conversion Congress and Exposition (ECCE), Detroit, MI, USA, 11–15 October 2020. [Google Scholar]
- Zhang, D.; Chen, D.Y.; Nave, M.J.; Sable, D. Measurement of noise source impedance of off-line converters. IEEE Trans. Power Electron. 2000, 15, 820–825. [Google Scholar] [CrossRef]
- See, K.T.; Deng, J. Measurement of noise source impedance of SMPS using a two probes approach. IEEE Trans. Power Electron. 2004, 19, 862–868. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Value |
|---|---|
| Cs | 20 nF |
| R1 | 10 kΩ |
| Llk | 2.8 uH |
| Cp | 80 pF |
| LM | 220 uH |
| n | 2 |
| Item | Value |
|---|---|
| Cin | 31.1 nF |
| CCM | 10 pF |
| LCM | 1 mH |
| RL | 25 Ω |
| CL | 0.2 uF |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chung, S.-K.; Kang, B.-G. Considerations for Gain Selection of Feedforward Active EMI Filters. Symmetry 2022, 14, 1826. https://doi.org/10.3390/sym14091826
Chung S-K, Kang B-G. Considerations for Gain Selection of Feedforward Active EMI Filters. Symmetry. 2022; 14(9):1826. https://doi.org/10.3390/sym14091826
Chicago/Turabian StyleChung, Se-Kyo, and Byeong-Geuk Kang. 2022. "Considerations for Gain Selection of Feedforward Active EMI Filters" Symmetry 14, no. 9: 1826. https://doi.org/10.3390/sym14091826
APA StyleChung, S.-K., & Kang, B.-G. (2022). Considerations for Gain Selection of Feedforward Active EMI Filters. Symmetry, 14(9), 1826. https://doi.org/10.3390/sym14091826