1. Introduction
This article discusses locally connected systems, which are called cellular neural networks (CNNs). The model was introduced in 1988 by L.O. Chua and L. Yang [
1,
2] as a new type of information processing systems that has key characteristics of neural networks and admits important applications in parallel image and signal processing, as well as pattern recognition [
3,
4,
5].
A class of CNNs based on shunting inhibition was introduced in paper [
6] by A. Bouzerdoum and R.B. Pinter. The shunting inhibitory cellular neural networks (SICNNs) have been effectively applied in vision and image processing adaptive pattern recognition [
7,
8,
9,
10]. The layers in SICNNs are considered arrays of neurons with two dimensions. The interactions of the cells inside a single layer are subdued to the biophysical mechanism of the recurrent shunting inhibition, where the conductance is modulated by voltages of neighboring elements [
6].
The impulses in neural networks are used to model the impact inputs. That is, in implementation, the state of a network can be subject to instantaneous perturbations and changes at certain moments, which may be reasoned by abrupt noise or the impact phenomenon. All this leads to a need for studies of impulsive neural networks. There are several results which explore anti-periodic, almost periodic and periodic solutions of impulse models of SICNN [
11,
12,
13].
If one considers the impact actions as limits of continuous ones, then the jump equation of the impulsive neural network must have a functional structure identical to the differential equation. Hence, it is of great interest to consider neural networks with the structure of the impulses symmetrical to the original model. That is, the components of the impulsive equation must be analogues of components of the differential equation. Due to the similarity, the model is named the symmetrical impulsive shunting inhibitory cellular neural network (SISICNN). Previously, in the literature, non-symmetrical impulsive models were considered [
11,
12,
13,
14,
15,
16].
The research of recurrence types, such as periodicity, quasi periodicity and others, started within the theory of celestial dynamics and was widely spread over all areas of applied mathematics. The next position occupies the class of complex types of dynamic behavior, such as Poisson stable motions. The stability was considered by H. Poincaré as the main property in describing the complexity of celestial dynamics [
17,
18]. Accordingly, it is logical to suppose that Poisson stable dynamics in neural networks should be investigated based on arguments which were provided for the discussion of other types of oscillation in neuroscience. The concepts of recurrent motions and Poisson stability are conservative notions, which are focused on the theory of differential equations and dynamical systems. If H. Poincaré is the founder of the Poisson stability theory [
17,
18], G. Birkhoff, by introducing recurrent motions [
19], established the important interrelationship of recurrent motions and the most sophisticated type of recurrence, Poisson stability.
The theoretical as well as application merits of periodicity, quasi-periodicity and almost periodicity for SICNNs have already been approved by many researchers [
7,
8,
9,
10,
11,
12,
13]. Similarly, Poisson-stable and unpredictable motions can be considered for the same reasons. The papers [
20,
21,
22,
23,
24] and book [
25] can be cited as examples.
In this paper, the method of included intervals is applied to show the existence and uniqueness of discontinuous Poisson stable motions for SISICNNs. The novelties as well as contributions, present and potential, can be emphasized as follows:
In previous studies [
20,
21,
22,
23,
24,
25], Poisson stability was considered for continuous systems. Here, we research the Poisson stability of discontinuous neural networks.
Neural models, described separately by impulsive differential equations and differential equations with generalized piecewise constant arguments were considered in earlier results [
11,
12,
13,
26,
27]. In this paper, we study SICNNs that include both impulses and the piecewise constant argument.
The structure of the impulsive action is symmetrical to the differential part of the SICNN, and this is the main modeling novelty of the research. The complete symmetry can be considered not only for SICNNs, but also for Hopfield-type neural networks, Cohen–Grossberg-type neural networks, inertial neural networks and other models.
In future investigations, the new method of included intervals can be used for neural networks with different types of discontinuity, as well as partial differential equations and functional differential equations.
The symbols , and , in the present paper, mean the sets of real numbers, natural numbers and integers, respectively.
Let us fix sequences of real numbers, which satisfy , for all , and as It is supposed that there exist two positive real numbers , such that for all .
In the present study, we consider SISICNN in the form
where
,
,
for each
and
;
if
is a piecewise constant function;
is the connection or coupling strength of the postsynaptic activity of the cell
transmitted to the cell
; the constants
represent the passive decay rate of the cells activity;
with fixed
i and
j is the activity of the cell
; the activation function
is a positive function representing the output or firing rate of the cell
; the couple
is the continuous-impact external input to the cell
; and
is the
r−neighborhood of the cell
, defined as
Like the continuous components of system (
1), one can say the same about the components of impacts, that is, the constant
with fixed
i and
j is the passive decay impulsive rate of the cell activity; the impact activation
is the output localized at a moment of impact of the cell
; and
is the strength of coupling by impacts due to the postsynaptic activity between cells
and
. We assume that
,
and
are continuous and bounded functions.
Next, we present Poisson stability for continuous and discontinuous functions and Poisson stable sequence.
Definition 1 ([
28])
. A function , is said to be Poisson stable, provided that it is bounded, continuous and there exists a sequence , as , which satisfies as on each bounded interval of . Definition 2 ([
28])
. A sequence , in is called Poisson stable, provided that it is bounded and there exists a sequence , , of positive integers, which satisfies as on bounded intervals of integers. A piecewise continuous function
, is called
conditional uniform continuous, if for every number
, there exists a number
which satisfies
whenever the points
and
belong to the same continuity interval and
[
26].
Let us consider the set of matrix functions , , , , such that each entry of the function is conditional uniform continuous. The entries of functions are continuous, except a countable set of moments, where they are left-continuous. The sets of points of discontinuity are unbounded on both sides and do not have finite accumulation points. For different functions, discontinuity moments are not necessarily common.
Definition 3 ([
29])
. Two functions and , , , from , are called ϵ−equivalent on a bounded interval J, if the discontinuity points and , , of and in J respectively are such that for each , and , for each , , , except possibly those between and for all k. In the case that
G,
F are
ϵ−equivalent on
J, we also call the functions in
ϵ−neighborhoods of each other on
J. The topology defined on the basis of all
ϵ− neighborhoods is said to be
B-topology [
29].
Definition 4. A member of is said to be a discontinuous Poisson stable function provided that there exists a sequence of real numbers, which satisfies as in B-topology on each compact set of real numbers.
2. Methods
Extending the Poisson stable point, M. Akhmet and M.O. Fen introduced the concept of the unpredictable point [
30]. Then, by assuming the separation property [
30], they introduced the concept of an unpredictable function and thereby elaborated the recurrence in functional spaces. An unpredictable function is a Poisson stable function. That is, to test the unpredictability, we check the validity of the Poisson stability. In papers [
20,
21,
22,
23,
24] and book [
25], considering the existence and uniqueness of unpredictable solutions, we developed a new approach: the method of included intervals for asserting the Poisson stability of solutions. The method is certainly different from the method of comparability by the character of recurrence in [
31,
32,
33,
34].
A novelty in the considered model (
1) is the generalized piecewise constant argument. Differential equations with generalized piecewise constant argument were introduced in 2005 by M. Akhmet [
26,
35,
36], and they attracted the attention of scientists for their effectiveness in the fields of biology, physics, economics, and neural networks [
26,
27]. The proposals became the most general not only in modeling, but also very powerful in the methodological sense since the equivalent integral equations were suggested to open the research gate for methods of operators’ theory and functional analysis. The suggestions were followed by the impressive research of ordinary differential, impulsive differential, functional differential, and partial differential equations [
37,
38,
39]. Mathematically, the generalized piecewise constant argument combines equations with retarded (delay) and advanced arguments, thereby making it possible to increase the applicability.
Impulsive systems are models for processes in which sharp interruptions of continuous processes are observed, and they are important in various fields such as medicine, mechanics, electronics, communication systems and neural networks [
40,
41,
42]. Currently, significant results of neural networks with impulses have been obtained. Basically, in these models, the impulsive part is of a simple form. In the present work, the impulsive part completely “copies” the original model, i.e., it is identical to the SICNN. The passive decay rates
,
,
, of SICNNs in [
43,
44] are positive. Unlike them, we do not demand the positiveness. In this paper, the coefficient can be positive, negative or zero valued, that is, due to the possibility of negative capacitance [
45,
46,
47]. Thus, in this article, using the methods of studying impulsive systems in previous results [
22,
29,
48], we investigate the existence of Poisson stable motion of SISCINN (
1).
3. Main Results
Let us introduce the subset of matrix functions , , , with the fixed set of moments of discontinuity , , and Poisson stable entries which satisfy , where H is a positive number, , . All functions of the given subset have the common convergence sequence , .
The function
satisfies SISICNN (
1), if and only if it is a solution of the integral equation
for each
i and
j [
29].
Define on
the operator
,
, as
We required that system (
1) satisfies the following conditions:
- (C1)
The inputs , , , are Poisson stable and the sequence , , is common for all inputs;
- (C2)
For the sequence , , , , , there exists sequence of integers, which diverges to infinity such that , as on each bounded interval of integers and for each , ;
- (C3)
For the sequences , , and , , there exists sequence of integers, which diverges to infinity which satisfies and as on each finite set of integers.
Let us consider the linear homogeneous impulsive system associated with (
1),
where
, constants
,
,
, are real valued numbers. The transition matrix of this system has the form [
29]
where
is the number of the members of the sequence
, lying in the interval
.
The following conditions for the system (
1) are required:
- (C4)
It is true that , for all , ;
- (C5)
, such that the following equalities are valid and ;
- (C6)
, which satisfies the inequality for all .
Due to (
3) and condition
, there exist numbers
such that the relation
is valid for all
,
[
29].
We also need the following conditions:
Let us accept the following notation
- (C10)
.
Theorem 1. The SISICNN (1) admits a unique bounded on discontinuous Poisson stable motion, provided conditions –. Proof. We will prove that system (
1) possesses a unique discontinuous Poisson stable solution by using the contraction mapping principle.
Let us show
If
belongs to
then
Making use of the inequality
one can obtain that
From the last inequality and condition , it follows that
Fix an arbitrary number
and a compact interval
, where
. We will prove for sufficiently large
n that the inequality
is satisfied for each
t in
Choose numbers
and
such that
and
Consider the number p sufficiently large for , , , whenever and , for all , , .
For a fixed
, we assume, without loss of generality, that
and
so that there exist exactly
d moments of discontinuity in the interval
Moreover, assume that
If
, then we have
By virtue of
Appendix A Lemma A1, one can obtain
if
,
. Additionally, we obtain
for all
,
.
Similarly, one can see that
if
,
.
Further, we need to obtain an upper bound for the following integral
We evaluate
by considering it on finite number of sub-intervals as described below:
where
and
for
For
it is clear that
and it follows from the condition
that
Using this result, we reach the following estimation:
We already know that
w is a uniformly continuous function. Thus, for
and sufficiently large
p one can find a
such that
if
This implies in turn that
On the other hand, condition
gives us that
If we use a similar approach used for the estimation of the integral
then it follows that
Therefore, it can be seen that
Using the last inequality, we have
for all
,
.
As a result of the computations, we obtain
for all
.
In consequence, the inequalities (
6) to (
12) give that
for
. Thus,
Next, introduce the norm , where , , for functions defined on .
Let us show that
is a contraction operator. If
then
The inequality yields Therefore, according to the condition , is a contractive operator.
Next, denote by , the interval , if and the interval , if .
Let us prove the completeness of the space
. Consider a Cauchy sequence
,
,
,
, in
, which converges to a limit function
on
. Fix a closed and bounded interval
. Denote
, the points of discontinuity of
and
, and
, the points of discontinuity of
and
in the interval
J, respectively. Let
p be a large enough number such that
. Because of the convergence of
we have that
and
if
l sufficiently large. Since
, for sufficiently large
p we have that
for
,
, and
. Thus, for sufficiently large
p,
l and
,
it is true that
for all
, and
. That is,
uniformly in
B-topology as
on
J. So, the space
is complete.
According to the conditions
–
operator
is invariant in
and contractive. Consequently, by the contractive mapping theorem, there exists a unique bounded on the
discontinuous Poisson stable solution
of the SISICNN (
1). □
Theorem 2. Assume that the conditions and are valid, then the unique discontinuous Poisson stable solution of the network (1) is globally asymptotically stable. Proof. Theorem 1 implies that the network (
1) has the unique discontinuous Poisson stable solution. Therefore, it remains to prove that the solution
possesses the asymptotic property.
Let us give our attention to the stability analysis of the solution .
Denote
for each
,
, where
is another solution of the system (
1). Then
will be a solution of the system (
A2) and thus it is true that
Hence, according to Lemma A2, we find
where
is determined by formula (
5), and multiplying by
, then using the Gronwall–Bellman Lemma [
29], one can obtain
This inequality means that
From the condition
, we reach the conclusion that the Poisson stable solution
of (
1) is globally asymptotically stable. The theorem is proved. □
In the next examples, we illustrate the results of the paper.
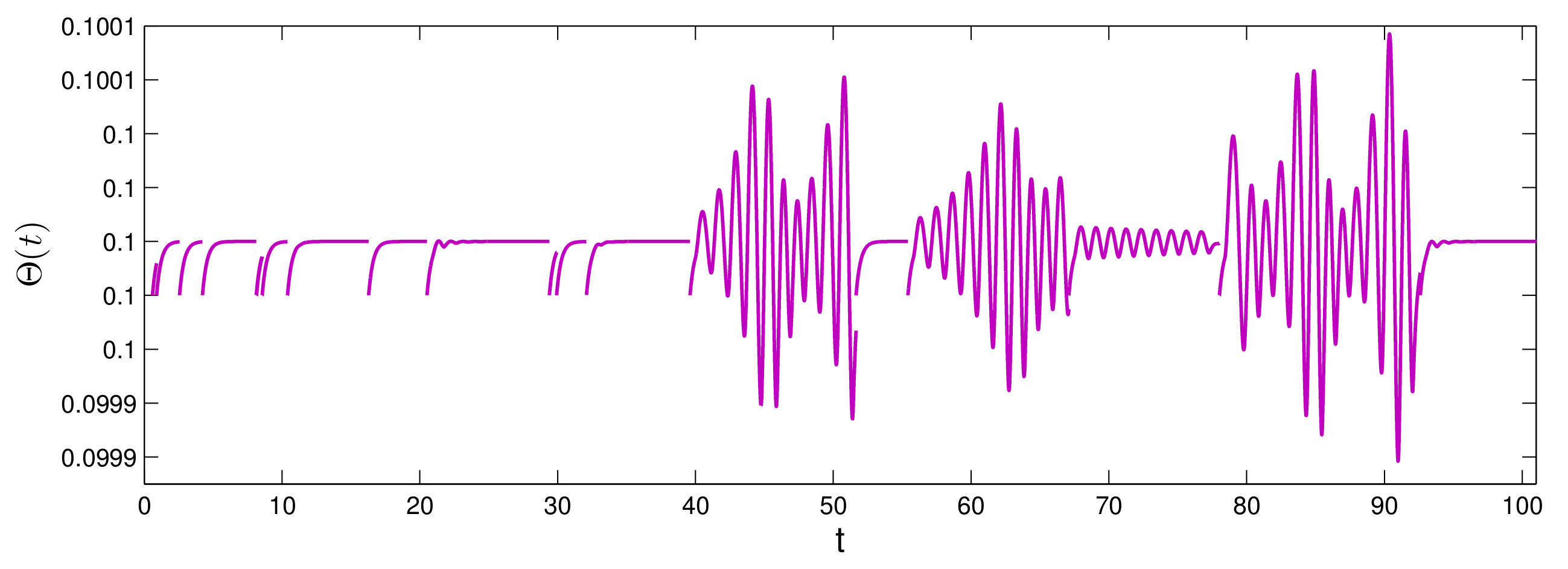
Example 1. We will construct a Poisson stable function. Consider the logistic equationin the interval . For each , the equation has Poisson stable solution [23]. That is, there exists a sequence , which satisfies as for each k in finite set of integers. First, we specify the discontinuity moments as followswhere , is the Poisson stable solution of (16). Since is a Poisson stable sequence, there exists a sequence , which satisfies as for each k in bounded intervals of integers. Let us show that is a Poisson stable sequence, with for each . We have thatas for each k in finite set of integers. Consider the following integral equation defined bywhere is a piecewise constant function, which is determined by the equation for , on . is bounded function on the whole real axis which satisfies (Figure 1). Let us check if the function satisfies the Poisson stability condition. Consider a number and a bounded and closed interval . Assume, without loss of generality, that α and β are integers. Choose and which satisfy , and , where . Moreover, let n be a large natural number such that on .
Then for all , we obtain Thus, as uniformly on the interval .
Example 2. Finally, let us consider the SISICNNwhere the rates of the cells activity are given as follows: , , , , , , , , , , , , and the coupling strength of postsynaptic activity are given byfor each i and j such that the cell , , belong to the neighborhood . As activation and impact activations, we consider the following functions , , and the continuous-impact external inputs are given by The argument function is defined by the sequence ,
We checked that conditions – are satisfied for (18) with , for all , , , , , , , , and . Then there exists the unique discontinuous Poisson stable motion of SISICNNs (18). In addition, the asymptotic stability conditions – are valid for this solution. One cannot simulate Poisson stable solution since it is impossible to determine the initial value precisely. Consequently, we will consider solution , with initial values , , , , , . Using (15), one can obtain that , . It means that the difference is decreasing exponentially. So, the graph of approaches the discontinuous Poisson stable solution of the SISCINN (18), as t increases. Then, we consider the graph of instead of the curve of the Poisson-stable solution . The coordinates of the function are shown in Figure 2 and Figure 3. 4. Discussion
The advantages of the SISICNNs under study lie in the following factors: the impulsive part is symmetrical to the differential equation; the inputs/outputs of the system are Poisson-stable functions and the derivatives of the sequences of discontinuity moments are Poisson stable; and there is a presence of a generalized piecewise constant argument.
It is known that many processes studied in applied sciences are described by differential equations. However, in many phenomena that have a sudden change in state [
40,
41,
42], the situation is completely different. The mathematical models of these processes are impulsive differential equations. Thus, we are to study the dynamics of continuous phenomena with sudden interruptions. There are many weighty theoretical and practical results on impulse differential equations [
11,
12,
13,
26,
40,
41,
42]. Previously, many models of impulsive neural networks were considered, where the impulsive parts are analogous to their differential parts [
11,
12,
13,
43]. Thus, the study of neural networks, in which the equations for the impulses are of the same structure as differential ones have not been practically considered. In this paper, we have removed the deficiency. The symmetry of the model allows to study in detail the state of the network when sharp jumps occur, which makes it possible to explore complex models of impulsive neural networks. Note that such symmetry of the impulsive part can be used not only for SICNNs, but also for impulse models of neural networks of the Hopfield type, neural networks of the Cohen–Grossberg type and those of the inertial type.
In this paper, by continuing the line of new types of oscillations for impulsive models of neural networks, we considered the discontinuous Poisson stable motions of SISICNNs. Poisson stable and unpredictable motions of SICNNs have been researched in several papers and books [
20,
21,
22,
23,
24,
25]. However, neural networks with impacts have not been considered for Poisson stability yet.
Differential equations with piecewise constant argument [
26,
35,
36] occupy an intermediate position between ordinary and functional differential equations. There are many significant results for neural networks, which are separately either impulsive differential equations [
11,
12,
13,
14,
15,
16] and equations with generalized piecewise constant arguments [
27]. In this paper, SICNNs were investigated with both impulses and piecewise constant argument.





{kind=link}
{kind=link}
{kind=link}