
Stress Point Monitoring Algorithm for Structure of Steel Cylinder Concrete Pipes in Large Buildings

Abstract
:1. Introduction
2. Structural Performance of Structure of Concrete Cylinder Pipe in Large Buildings
2.1. Influence of Buried Depth on Stress of Cylinder Concrete Pipe
2.2. Influence of Internal Water Pressure on the Stress of Cylinder Concrete Pipe
2.3. Influence of Wall Thickness on Stress of Cylinder Concrete Pipe
2.4. Influence of Concrete Strength on Stress of Concrete Cylinder Pipe
2.5. Calculation and Analysis of Prestress Design
3. An Algorithm of Monitoring Stress Point in Structure of Cylinder Concrete Pipe
3.1. Hypothesis and Perception Model
- (1)
- All nodes are isomorphic and symmetrical, that is, they have the same perception radius, angle and communication radius;
- (2)
- After the initial monitoring, the node can move and the sensing direction can be adjusted;
- (3)
- The node has known its own location information through a location algorithm;
- (4)
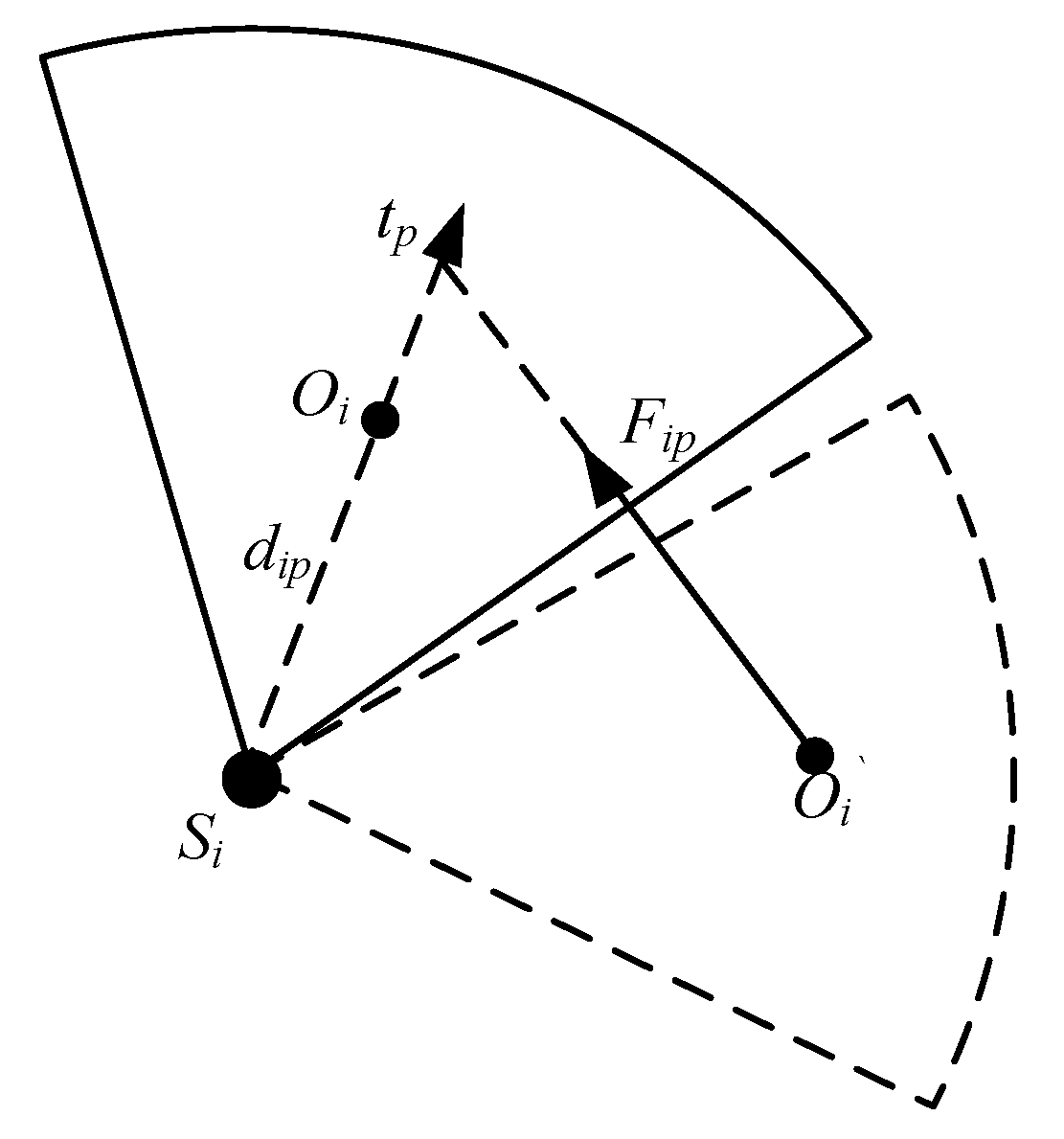
- The force point of node is its own position and the centroid of the fan-shaped sensing area. The force on the node changes its position, and the force on the center of mass changes its sensing direction.
3.2. Force Analysis of Pressure Points
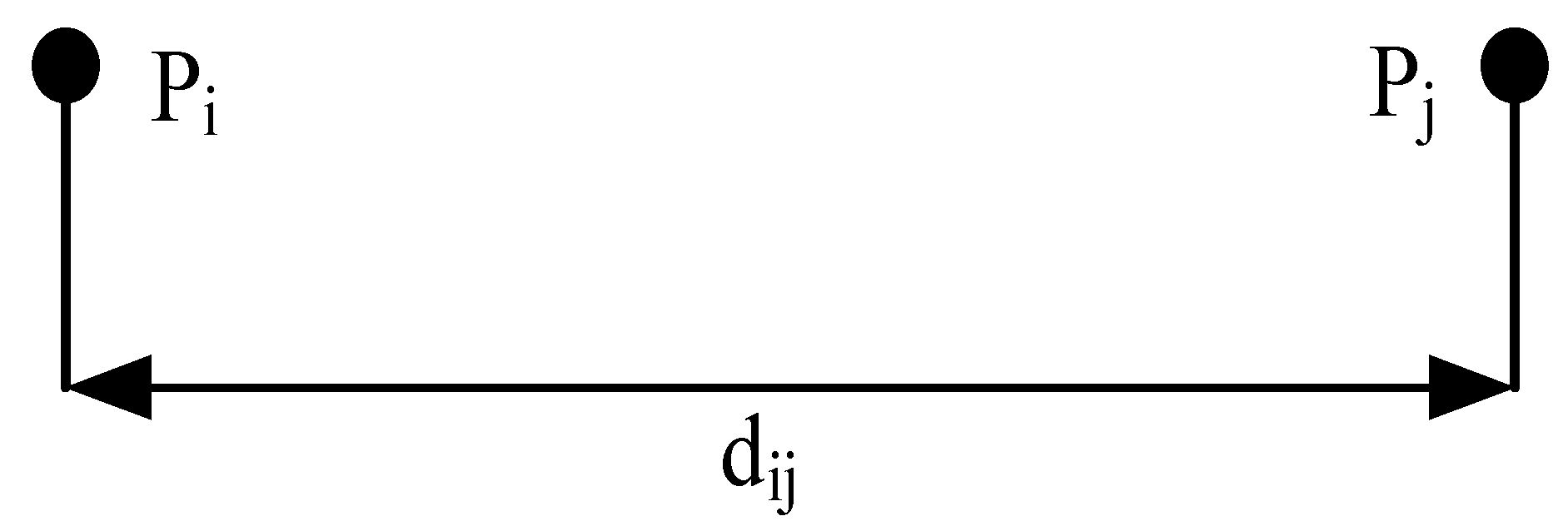
3.2.1. Principle of Virtual Potential Field
3.2.2. Mechanical Analysis of Node
3.2.3. Force Analysis of Centroid of Sensing Area
3.3. Description of Monitoring Algorithm
4. Simulation Experiment and Results
4.1. Algorithm Performance
4.1.1. Network Immunity
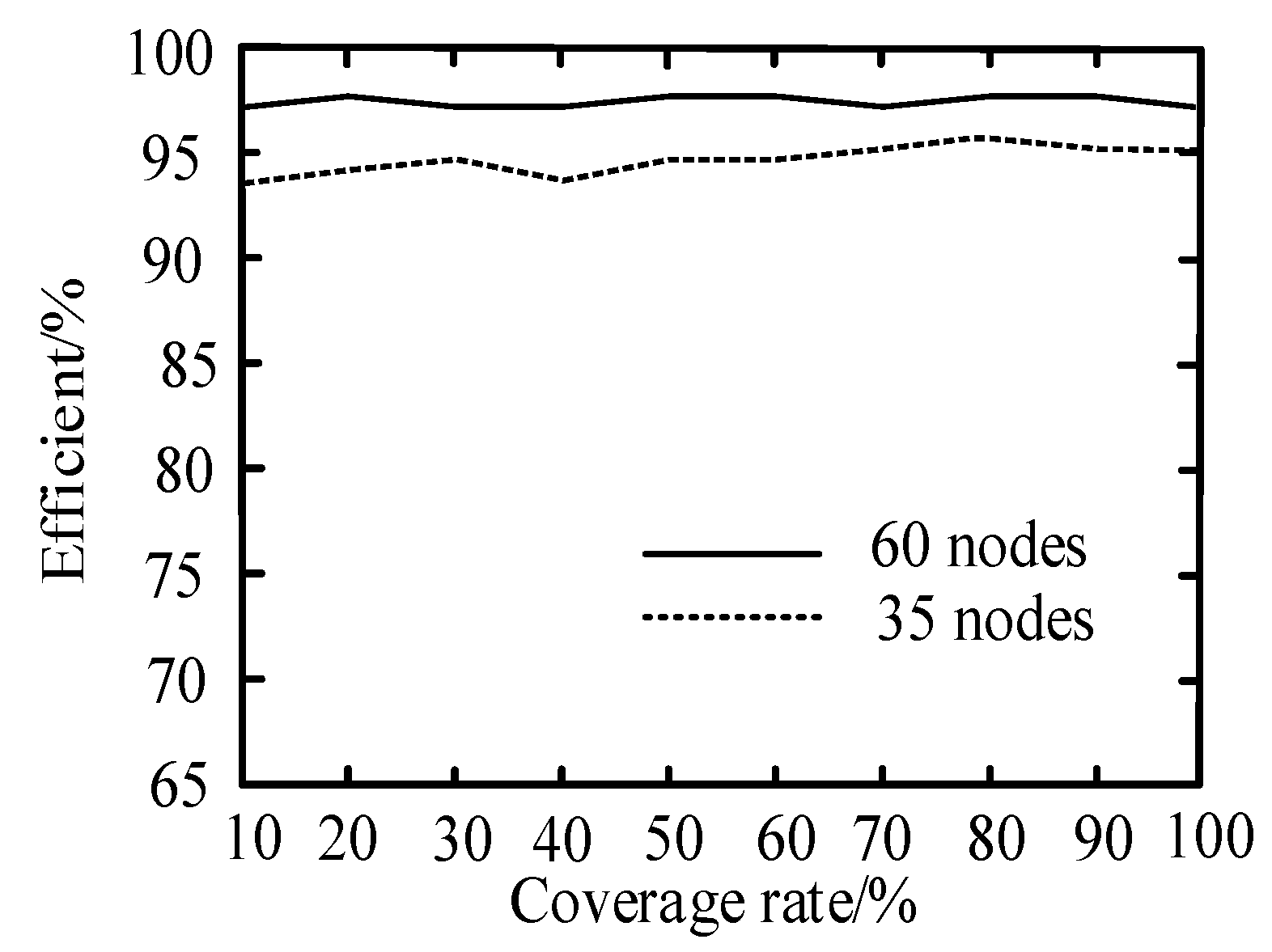
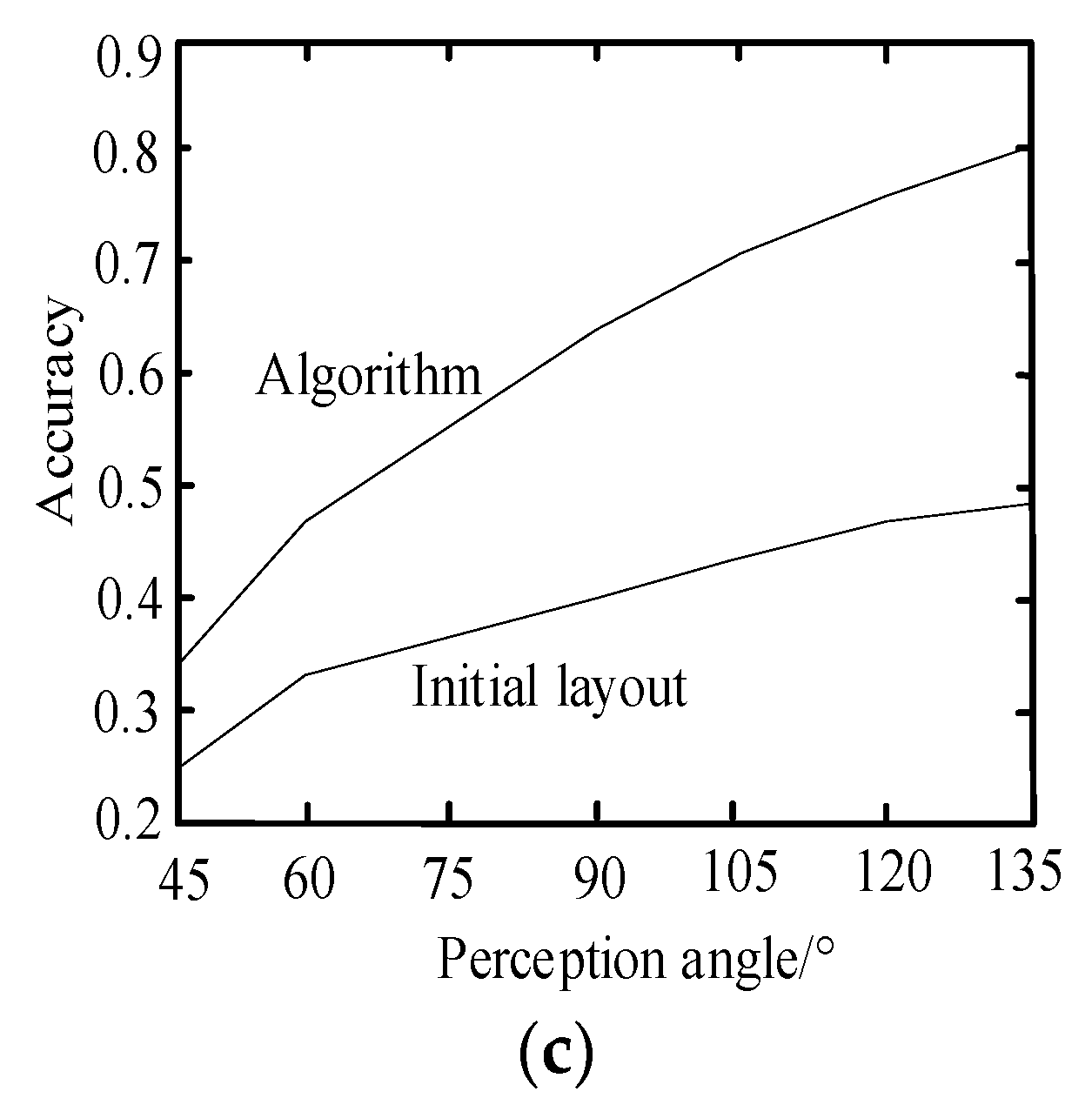
4.1.2. Influence of Parameters on the Monitoring Algorithm
4.2. Application Effect of Monitoring Algorithm
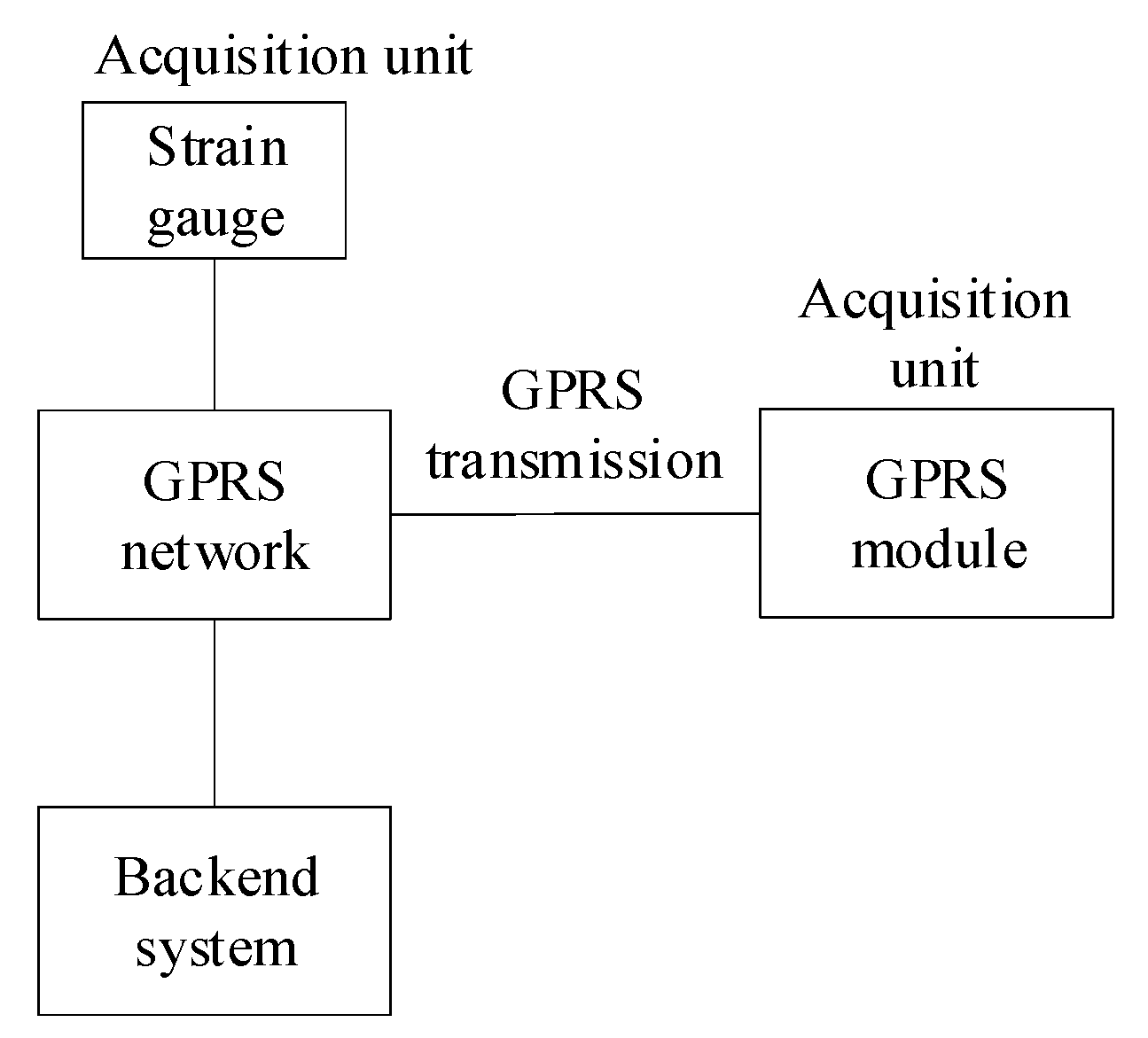
4.2.1. System Overview
4.2.2. Field Devices and Installation
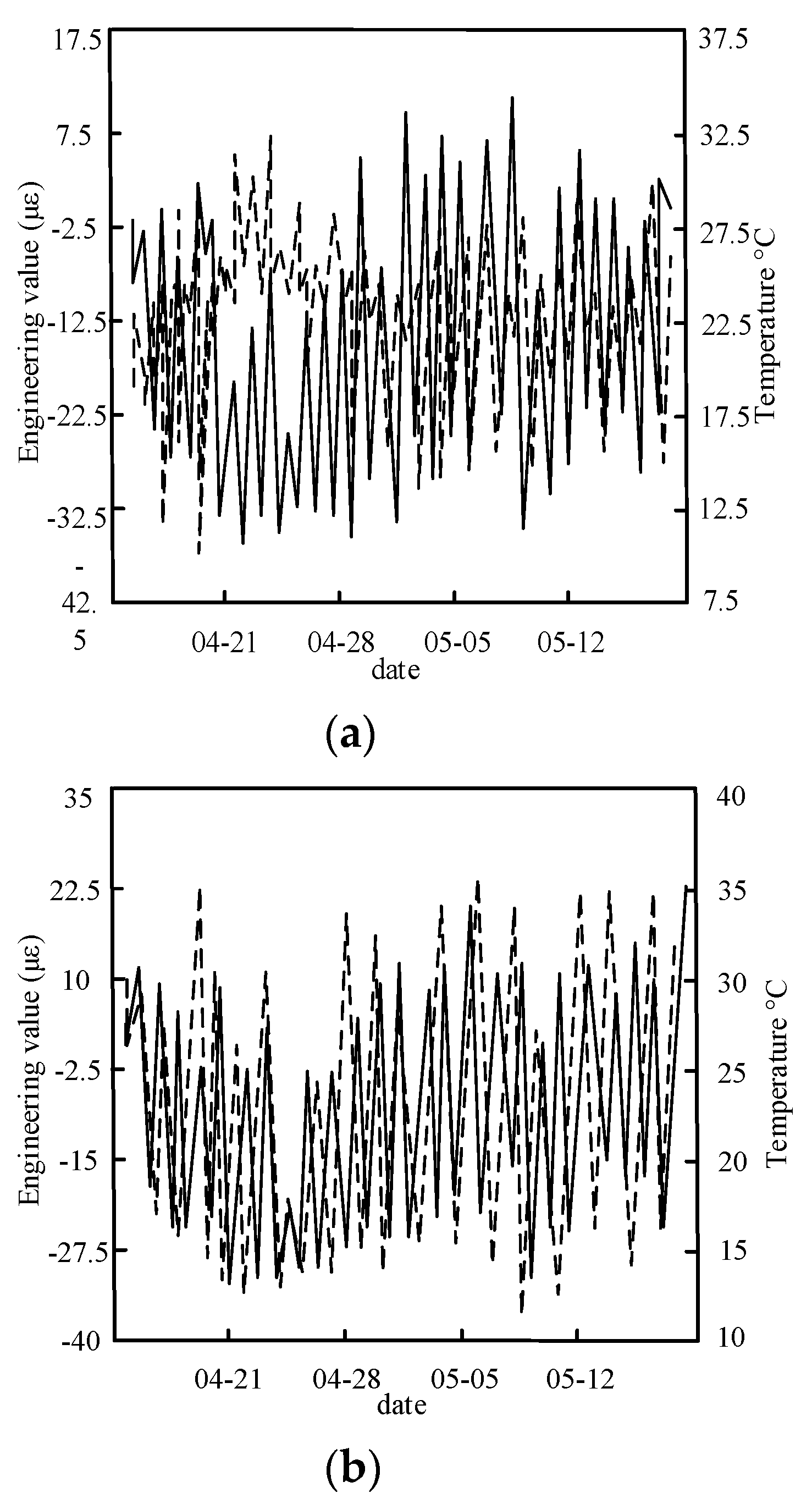
4.2.3. Real-Time Analysis of Measuring Data on the Spot
5. Conclusions
- (1)
- According to the distribution rule of circumferential prestress produced by prestressed steel wire on the pipe core concrete, the influence of buried depth, internal water pressure, pipe wall thickness and concrete strength on the stress of cylinder concrete pipe is obtained, which lays the theoretical and data foundation for the monitoring algorithm;
- (2)
- By designing a series of basic assumptions, the analysis process and algorithm are simplified;
- (3)
- The interaction force between the node and the force point is regarded as two charged particles in the virtual potential field. The force on the node and the centroid of the sensing area were analyzed. In this way, the accuracy of the monitoring algorithm was improved;
- (4)
- Through the simulation of the monitoring algorithm, the influence of the number of nodes, sensing radii and sensing angles on the monitoring accuracy was analyzed, and then the index was set as the best parameter to improve the reliability of the algorithm.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cui, G.H.; Cui, K.K.; Wu, H.M.; Zhang Y., W.; Liu, J. Reliability analysis for pressing force of prestressed concrete cylinder pipe port grinding robot. Chin. J. Eng. Des. 2018, 25, 647–654. [Google Scholar]
- Salih, C.; Manalo, A.; Ferdous, W.; Yu, P.; Heyer, T.; Schubel, P. Behaviour of timber-alternative railway sleeper materials under five-point bending. Constr. Build. Mater. 2022, 316, 125882. [Google Scholar] [CrossRef]
- Mohammed, A.A.; Manalo, A.; Ferdous, W.; Abousnina, R.; AlAjarmeh, O.; Vijay, P.; Benmokrane, B. Design considerations for prefabricated composite jackets for structural repair: Parametric investigation and case study. Compos. Struct. 2021, 261, 113288. [Google Scholar] [CrossRef]
- Dou, T.S.; Cheng, B.Q.; Hu, H.; Xia, S.F.; Yang, J.X.; Zhang, Q. Prototype test study on deformation law of prestressed steel concrete pipe structure II: External pressure. J. Hydraul. Eng. 2018, 49, 207–215. [Google Scholar]
- He, C.L.; Zeng, Z.; Ma, B.S.; Zhao, Y.H.; Zhang, H.F. Surrounding soil load model for structural restoration design of concrete pipes. Geol. Sci. Technol. Inf. 2019, 38, 269–274. [Google Scholar]
- Sun, Y.Y.; Hu, S.W.; Xue, X.; Hu, D.X.; Wang, X.L. Analysis of negative pressure bearing capacity of prestressed concrete cylinder pipe (PCCP). Concrete 2018, 346, 23–26, 31. [Google Scholar]
- Hu, H.; Dou, T.; Niu, F.; Zhang, H.; Su, W. Experimental, and numerical study on CFRP-lined prestressed concrete cylinder pipe under internal pressure. Eng. Struct. 2019, 190, 480–492. [Google Scholar] [CrossRef]
- Yang, W.; Fan, Z.; Wu, F. Design of wireless sensor network based on 6LoWPAN and MQTT. GuofangKejiDaxueXuebao/J. Natl. Univ. Def. Technol. 2019, 41, 161–168. [Google Scholar]
- Al-Nasra, M. Concrete tensile strength of hollow cubes subjected to water pressure. ACI Mater. J. 2019, 116, 151–157. [Google Scholar] [CrossRef]
- Fomichev, P.A.; Zarutskii, A.V. Fatigue life prediction by a local stress-strain criterion for hole-containing specimens after precompression of their material. Strength Mater. 2019, 51, 193–201. [Google Scholar] [CrossRef]
- Qu, C.; Lv, Y.; Yang, Z.; Xu, X.; Zhu, D.; Yan, S. An improved chip-thickness model for surface roughness prediction in robotic belt grinding considering the elastic state at contact wheel-workpiece interface. Int. J. Adv. Manuf. Technol. 2019, 104, 3209–3217. [Google Scholar] [CrossRef]
- Zhong-Yong, S.; Yong-Tao, J.I. Percolation model of seepage irrigation system and optimization of buried depth of irrigation pipe. Ground Water 2018, 40, 115–117, 175. [Google Scholar]
- Zheng, J.; Zhang, C.; Li, A. Experimental investigation on the mechanical properties of curved metallic plate dampers. Appl. Sci. 2019, 10, 269. [Google Scholar] [CrossRef] [Green Version]
- Kovalnogov, V.N.; Simos, T.E.; Tsitouras, C. Runge-Kutta Pairs suited for sir-type epidemic models. Math. Methods Appl. Sci. 2021, 44, 5210–5216. [Google Scholar] [CrossRef]
- Mou, B.; Bai, Y. Experimental investigation on shear behavior of steel beam-to-CFST column connections with irregular panel zone. Eng. Struct. 2018, 168, 487–504. [Google Scholar] [CrossRef]
- Ju, B.S.; Gupta, A.; Ryu, Y. Seismic fragility of steel piping system based on pipe size, coupling type, and wall thickness. Int. J. Steel Struct. 2018, 18, 1–10. [Google Scholar] [CrossRef]
- Alajarmeh, O.S.; Manalo, A.C.; Benmokrane, B.; Karunasena, W.; Mendis, P. Effect of spiral spacing and concrete strength on behavior of gfrp-reinforced hollow concrete columns. J. Compos. Constr. 2020, 24, 04019054. [Google Scholar] [CrossRef]
- Khedr, A.M.; Osamy, W.; Salim, A.; Agrawal, D.P. Sensor network node scheduling for preserving coverage of wireless multimedia networks. IET Wirel. Sens. Syst. 2019, 9, 295–305. [Google Scholar]
- Van Vugt, D.C.; Kamp, L.P.J.; Huijsmans, G.T.A. Closed-Form solutions for the trajectories of charged particles in an exponentially varying magnetostatic field. IEEE Trans. Plasma Sci. 2019, 47, 296–299. [Google Scholar] [CrossRef] [Green Version]
- Thai, P.V.; Abe, S.; Kosugi, K.; Saito, N.; Takahashi, K.; Sasaki, T.; Kikuchi, T. Interaction and transfer of charged particles from an alternating current glow discharge in liquids: Application to silver nanoparticle synthesis. J. Appl. Phys. 2019, 125, 633–645. [Google Scholar] [CrossRef]
- Mcnamee, C.E.; Kawakami, H. Effect of the surfactant charge and concentration on the change in the forces between two charged surfaces in surfactant solutions by a liquid flow. Langmuir 2020, 36, 1887–1897. [Google Scholar] [CrossRef] [PubMed]
- Medvedeva, M.A.; Simos, T.E.; Tsitouras, C. Exponential Integrators for Linear Inhomogeneous Problems. Math. Methods Appl. Sci. 2021, 44, 937–944. [Google Scholar] [CrossRef]
- Abedini, M.; Mutalib, A.A.; Zhang, C.; Mehrmashhadi, J.; Raman, S.N.; Alipour, R.; Momeni, T.; Mussa, M.H. Large deflection behavior effect in reinforced concrete columns exposed to extreme dynamic loads. Front. Struct. Civ. Eng. 2020, 14, 532–553. [Google Scholar] [CrossRef] [Green Version]
- Zhang, C.; Abedini, M. Development of P-I model for FRP composite retrofitted RC columns subjected to high strain rate loads using LBE function. Eng. Struct. 2022, 252, 113580. [Google Scholar] [CrossRef]
- Zhu, L.M.; Zhang, C.W.; Guan, X.M.; Uy, B.; Sun, L.; Wang, B. The multi-axial strength performance of composite structural b-c-w members subjected to shear forces. Steel Compos. Struct. 2018, 27, 75–87. [Google Scholar]
- Zhang, W.; Tang, Z.; Yang, Y.; Wei, J.; Stanislav, P. Mixed-Mode debonding behavior between CFRP plates and concrete under fatigue loading. J. Struct. Eng. 2021, 147, 04021055. [Google Scholar] [CrossRef]
- Luo, Y.; Zheng, H.; Zhang, H.; Liu, Y. Fatigue reliability evaluation of aging prestressed concrete bridge accounting for stochastic traffic loading and resistance degradation. Adv. Struct. Eng. 2021, 24, 3021–3029. [Google Scholar] [CrossRef]
- Rahman, A.; Oldford, R.W. Euclidean distance matrix completion and point configurations from the minimal spanning tree. Siam J. Optim. 2018, 28, 528–550. [Google Scholar] [CrossRef] [Green Version]
- Ding, J.; Ke, Y.; Cheng, L.; Zheng, C.; Li, X. Joint estimation of binaural distance and azimuth by exploiting deep neural networks. J. Acoust. Soc. Am. 2020, 147, 2625–2635. [Google Scholar] [CrossRef]
- Yamamoto, T.; Hanabusa, M.; Kimura, S.; Momoi, Y.; Hayakawa, T. Changes in polymerization stress and elastic modulus of bulk-fill resin composites for 24 hours after irradiation. Dent. Mater. J. 2018, 37, 87–94. [Google Scholar] [CrossRef] [Green Version]
- Hamasha, M.M.; Al-Rabayah, M.; Aqlan, F. Standard tables of truncated standard normal distribution using a new summarizing method. Mil. Oper. Res. 2018, 15, 216–247. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location. | Inner Tube Core Concrete | Outer Tube Core Concrete | Steel Cylinder | Mortar Protective Course | ||||
|---|---|---|---|---|---|---|---|---|
| Buried Depth | Maximum Stress | Minimum Stress | Maximum Stress | Minimum Stress | Maximum Stress | Minimum Stress | Maximum Stress | Minimum Stress |
| 3 m | −1.56 | −11.1 | −1.82 | −8.05 | −24.5 | −48.2 | 0.230 | −7.53 |
| 5 m | 0.583 | −14.3 | −0.234 | −10.0 | −20.6 | −57.4 | 0.813 | −9.58 |
| 6 m | 1.66 | −16.0 | 0.564 | −11.0 | −18.6 | −61.9 | 1.68 | −10.6 |
| 7 m | * | −17.6 | 1.36 | −12.0 | −16.7 | −66.5 | * | −11.6 |
| Location | Inner Tube Core Concrete | Outer Tube Core Concrete | Steel Cylinder | Mortar Protective Course | ||||
|---|---|---|---|---|---|---|---|---|
| Inner Pressure | Maximum Stress | Minimum Stress | Maximum Stress | Minimum Stress | Maximum Stress | Minimum Stress | Maximum Stress | Minimum Stress |
| 0.6 MPa | 0.583 | −14.3 | −0.234 | −10.0 | −20.6 | −57.4 | 0.813 | −9.58 |
| 0.7 MPa | 1.35 | −13.6 | 0.416 | −9.42 | −12.8 | −52.7 | 1.41 | −9.01 |
| 0.8 MPa | 2.01 | −12.9 | 1.07 | −8.80 | −11.1 | −48.1 | 2.11 | −8.45 |
| 0.84 MPa | * | −12.7 | 1.33 | −8.56 | −9.19 | −46.2 | * | −8.22 |
| Location | Inner Tube Core Concrete | Outer Tube Core Concrete | Steel Cylinder | Mortar Protective Course | ||||
|---|---|---|---|---|---|---|---|---|
| Wall Thickness | Maximum Stress | Minimum Stress | Maximum Stress | Minimum Stress | Maximum Stress | Minimum Stress | Maximum Stress | Minimum Stress |
| 260 mm | 0.981 | −16.8 | 0.0844 | −11.7 | −19.6 | −71.2 | 1.41 | −11.3 |
| 280 mm | 0.749 | −15.5 | 0.0978 | −10.8 | −19.8 | −64.3 | 1.07 | −10.4 |
| 300 mm | 0.583 | −14.3 | −0.234 | −10.0 | −20.6 | −57.4 | 0.813 | −9.58 |
| 320 mm | 0.430 | −13.4 | −0.350 | −9.35 | −19.5 | −53.6 | 0.607 | −8.81 |
| Location | Inner Tube Core Concrete | Outer Tube Core Concrete | Steel Cylinder | Mortar Protective Course | Prestressed Wire | ||||
|---|---|---|---|---|---|---|---|---|---|
| Inner Pressure | Maximum Stress | Minimum Stress | Maximum Stress | Minimum Stress | Maximum Stress | Minimum Stress | Maximum Stress | Minimum Stress | |
| C40 | 0.583 | −14.3 | −0.234 | −10.0 | −20.6 | −57.4 | 0.813 | −9.58 | 1110 |
| C50 | 0.824 | −15.6 | 0.017 | −11.0 | −18.7 | −61.1 | 1.13 | −9.96 | 1150 |
| C60 | 0.880 | −15.8 | 0.101 | −11.1 | −18.0 | −58.9 | 1.16 | −9.67 | 1150 |
| Serial Number of Strain Gage | Numerical Reading (με) | Check 0 (με) | After Validation (με) | Stress (MPa) |
|---|---|---|---|---|
| 40-1 | −10.987 | 18 | −28.987 | −5.971 |
| 40-2 | −7.178 | 6.5 | −13.678 | −2.818 |
| 40-3 | −5.939 | 6.1 | −12.039 | −2.48 |
| 40-4 | −27.521 | −11.4 | −17.121 | −3.527 |
| 95-1 | −51.455 | −30.38 | −21.075 | −4.341 |
| 95-2 | −17.476 | −15.65 | −1.826 | −0.376 |
| 95-3 | −37.176 | −13.5 | −23.676 | −4.877 |
| 95-4 | −5.502 | −11.1 | 8.1 | 1.669 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, H.; Jiang, S. Stress Point Monitoring Algorithm for Structure of Steel Cylinder Concrete Pipes in Large Buildings. Symmetry 2022, 14, 1261. https://doi.org/10.3390/sym14061261
Yang H, Jiang S. Stress Point Monitoring Algorithm for Structure of Steel Cylinder Concrete Pipes in Large Buildings. Symmetry. 2022; 14(6):1261. https://doi.org/10.3390/sym14061261
Chicago/Turabian StyleYang, Huabin, and Suo Jiang. 2022. "Stress Point Monitoring Algorithm for Structure of Steel Cylinder Concrete Pipes in Large Buildings" Symmetry 14, no. 6: 1261. https://doi.org/10.3390/sym14061261
APA StyleYang, H., & Jiang, S. (2022). Stress Point Monitoring Algorithm for Structure of Steel Cylinder Concrete Pipes in Large Buildings. Symmetry, 14(6), 1261. https://doi.org/10.3390/sym14061261