1. Introduction
Classical target tracking is ordinarily conducted using limited data [
1,
2,
3,
4]. However, in low signal-to-noise ratio (SNR) environments, single frame threshold processing may discard the detection of weak targets, resulting in tracking performance degradation. Although a low threshold can guarantee sufficient detection probability, the increased false alarm rate will increase the difficulty of data association.
An effective method for detecting and tracking low SNR targets is track-before-detect (TBD) [
5,
6,
7,
8]. TBD is performed by simultaneously processing multiframe raw measurements [
9,
10,
11] or measurements preprocessed with a low threshold [
12,
13,
14,
15]. There are two types of TBD algorithms, i.e., single frame recursive TBD [
8,
16,
17] and multiframe (MF) or batch processing based TBD [
18,
19,
20]. The former TBD includes particle filtering based TBD [
21,
22,
23] and a random finite set approach based TBD [
8,
17,
24]. The latter TBD includes Hough transform based TBD [
12,
25,
26], dynamic programming (DP) based TBD [
10,
27,
28], and velocity filtering (VF) based TBD [
18,
20,
29].
MF-TBD can increase the target SNR through the integration of multiple frames. DP-TBD and VF-TBD are the two most commonly used multiframe TBD methods. In DP-TBD, the target energy is integrated by searching for the local maximum value. An advantage of DP-TBD is to manage low maneuvering targets, but it may suffer from envelope expansion [
10,
28,
30]. In VF-TBD, the target energy is integrated along the target trajectory by matching the target velocity. VF-TBD can obtain well-focused target envelope and have high integration efficiency. This can facilitate the improvement of target detection and parameter estimation. However, its performance is degraded when the assumed velocity is mismatched with the actual one [
31,
32].
MF-TBD was first proposed to detect moving targets in optical and infrared images [
26,
31,
33]. Recently, it was extended to radar and sonar systems [
25,
28,
34]. Conventional TBD methods use only the amplitude information of raw data for multiframe integration. However, in radar systems [
35], the raw measurements contain both amplitude and phase information. The discarding of the raw radar data phase will lead to performance degradation of TBD. In [
10,
36], the additional phase information is considered in multiframe integration. One challenge of the above TBD methods is model mismatch when used in radar systems. The motion approximation in the observed plane results in motion model mismatch. The use of an inaccurate model in multiframe integration may cause integration loss and performance degradation [
10,
37,
38,
39,
40]. In [
29,
34,
41], a mixed-coordinate approach and a speed square filter are proposed for accurate energy integration in radar systems. However, these methods discard the phase information of radar measurements. Meanwhile, radar and sonar systems often follow target amplitude fluctuation. Most TBD methods assume that the target amplitude is constant and multiframe integration is conducted based on the non-fluctuation assumption. The research on fluctuating target TBD in radar systems is insufficient. Thus, it is urgent to present appropriate methods for accurate TBD of fluctuating targets in radar systems.
In this paper, an improved TBD method is proposed for weak fluctuating target detection and tracking in the raw radar RD plane. The accurate target state evolution in RD plane is derived. To make full use of both amplitude and phase information of raw RD measurements, a matched filtering based TBD in RD plane is presented. To deal with target fluctuation in RD plane, we comprehensively consider different fluctuation models, including Rayleigh distributed model, distributed model, Log-Normal distributed model, Weibull distributed model, and K distributed model. The procedure for multiframe integration of proposed method is described in detail. The output envelope of a fluctuating target is derived, and the computational complexity is analyzed. Finally, the effectiveness of the proposed method is demonstrated by both numerical simulations and real data.
The specific contributions of the paper are summarized as: (1) The target state evolution in RD plane is derived accurately. (2) The additional phase information of complex-valued RD data is fully used for performance improvement of TBD. (3) Five common fluctuation models are considered and the multiframe integration procedure of fluctuating target is provided. (4) The theoretical output envelope of a fluctuating target is derived.
The rest of this paper is organized as follows. Section II provides the target motion and measurement models and the limitations of conventional TBD methods are described. In Section III, the proposed method is presented and analyzed in detail. Section IV provides the processing results of both numerical simulations and real data, and Section V concludes the paper.
2. Problem Formulation
The target is moving with a constant velocity, and the state evolution in Cartesian coordinates is given by
where
is the frame interval,
and
, respectively, denote the target initial position and position in frame
, and
denotes the constant target velocity.
The observed RD plane of a Doppler radar consists of cells, and the resolutions of range and Doppler cells are and , respectively. The complex-valued measurement recorded in cell in frame is .
In the absence and presence of a target, the measurement
is, respectively, given by
and
where
denotes the complex-valued Gaussian background noise and
denotes the target echo value in cell
in frame
. The energy spillover of a target is usually described by a point spread function as
where
is the minimum Doppler velocity,
is the target phase in frame
, which is uniformly distributed over (0, 2
), and
denotes the echo spread. The target amplitude
fluctuates independently over time. According to [
10,
28,
35], the most commonly used target fluctuation models in radar systems are the Rayleigh distributed model,
distributed model with four degrees of freedom, Log-Normal distributed model, Weibull distributed model, and K distributed model.
For a Rayleigh distributed model (i.e., Swerling I model in radar systems [
10,
28,
35]), the probability density function (PDF) of
is
where
is the mean square amplitude.
For
distributed model with four degrees of freedom (i.e., Swerling III model in radar systems [
10,
28,
35]), the PDF of
is
For Log-Normal distributed model, the PDF of
is
where
and
are the logarithmic mean and standard deviation, respectively. The mean square amplitude of Log-Normal distributed model is
.
For Weibull distributed model, the PDF of
is
where
and
are the scale parameter and shape parameter, respectively. The mean square amplitude of Weibull distributed model is
where is a Gamma function.
For K distributed model, the PDF of
is
where
and
are the scale parameter and shape parameter, and
is the modified
th order Bessel function of the second kind. The mean square amplitude of K distributed model is
.
For a non-fluctuating model, the parameter is constant over time.
The observed matrix in frame
is
The measurement set of all
frames is
This paper is devoted to the research on TBD of weak fluctuating targets in the complex-valued RD plane. Conventional TBD methods [
10,
37,
38,
39,
40] usually use approximate motion models for multiframe integration in the observed plane. The algorithm performance may be degraded due to the use of inaccurate motion model approximation. Although some TBD methods [
29,
34,
41] deal with the problem of model mismatch in multiframe integration, only amplitude is used and the phase information discarding of complex-valued RD measurements may result in integration loss. Meanwhile, most current TBD methods are conducted based on the assumption of constant amplitude, thus the research on TBD of fluctuating targets is limited.
3. TBD of Weak Fluctuating Target in Complex-Valued RD Plane
This section is devoted to the track-before-detect of weak fluctuating target in complex-valued RD plane.
3.1. Accurate RD Evolution
According to Equations (1) and (2), the target RD state in frame
is given by
where
is the target RD state in frame
. According to Equations (13) and (14), the RD state can be predicted accurately by matching the target speed value
. Thus, the target energy can be integrated effectively in RD plane according to the accurate RD model. Note that the derivation above ignores the process noise. It is a common assumption in MF-TBD [
26,
31,
32,
33]. In the case of large motion uncertainty, the ignorance of process noise in the above model may cause performance loss.
3.2. Multiframe Processing
It is assumed that the RD cell
contains the target spilled energy in frame
. The range and Doppler state corresponding to cell
is given by
In the case where there is no prior information about the target position, each RD cell may contain the target energy, i.e., and .
According to the accurate RD model in Equations (13) and (14), the RD state in frame
can be predicted to the last frame
as
where
is the assumed target speed.
The predicted range and Doppler state
are, respectively, quantified as
Considering the phase information of complex-valued RD measurement, a complex-valued pseudo-spectrum is constructed around the predicted
with the complex-valued measurement
. The complex-valued pseudo-spectrum is constructed according to the point spread function as
The complex-valued pseudo-spectrum has the same phase as the complex-valued measurement .
As illustrated in Equation (5), the target phase in each cell in a frame is the same, while the noise phase is random. By integrating the complex-valued pseudo-spectra from the same frame
, the intraframe integration result is given by
where
and
are, respectively, the sets of range and Doppler cells, which may contain the target energy.
As illustrated in Equation (22), the measurement phase is retained and the above integration can be considered as intraframe coherent integration. Due to the use of phase information, the integration efficiency can be improved and the algorithm performance is, in return, increased.
Finally, the interframe integration is conducted incoherently by accumulating the amplitudes of the above intraframe integration results from
frames.
where
is the modulo operator.
The procedure for accurate multiframe integration in complex-valued RD plane is provided in Algorithm 1, where
is the zero matrix. The procedure in Algorithm 1 can be summarized as: accurate RD prediction according to accurate RD model, intraframe coherent integration, and interframe non-coherent integration. The use of additional phase information in intraframe coherent integration increases the integration efficiency and is beneficial to algorithm performance improvement.
| Algorithm 1: Accurate integration in complex-valued RD plane |
| Input: |
Initialize the integration matrix:
Assume target speed:
Fordo
Fordo
Fordo
RD state:,
RD prediction:,
Quantification:,
Complex-valued pseudo-spectrum construction in RD plane:
Intraframe integration:
Interframe integration:
End
End
End
Output: |
3.3. Output Envelope of Fluctuating Target
In this section, the output envelope of a fluctuating target in RD plane is derived theoretically.
As described above, the proposed method is actually a matched filtering based approach, whose characteristic is determined by the filter transfer function. According to [
31,
32], the filter transfer function with assumed target speed
in RD plane is given by
where
and
are, respectively, the target range and Doppler predicted with assumed target speed
,
. The above filter transfer function is used to obtain RD prediction for multiframe integration.
For convenience, the target echo in Equation (5) can be rewritten as
where
denotes the echo envelope of a fluctuating target, and
and
are, respectively, the fluctuating target amplitude and random target phase in frame
. As illustrated in Equations (24) and (25), the filter transfer function can be obtained by flipping the target echo envelope.
The target complex-valued pseudo-spectrum in frame
in RD plane is given by
where
represents the distance from target position to pseudo-spectrum peak, and
,
. The intraframe integration result of complex-valued pseudo-spectra in frame
is given by
where
is the intraframe integration result of frame
.
By convolving the amplitude of intraframe integration result and the filter transfer function, the interframe integration result with assumed target speed
is given by
where
represents the convolution, and
is the theoretical output envelope of a fluctuating target in RD plane. The filter bank consists of the maximum output values in each filter in the target position
, which is given by
When the assumed target speed is matched with the actual speed, the output reaches the maximum. The filter bank width is designed as the 3 dB width of filter bank in Equation (29).
3.4. Computational Complexity
As derived above, the integration in the proposed method mainly consists of two steps, i.e., intraframe integration and interframe integration. It is assumed that the number of filters is and the number of cells occupied by pseudo-spectrum is . The computational complexity of interframe non-coherent integration is . For intraframe coherent integration, the complexity of complex number addition is twice that of the real number addition, meanwhile the computational complexity of intraframe coherent integration is twice that of interframe non-coherent integration. In the case of , the proposed method is degraded to single frame detection.
4. Experimental Results
In this section, both numerical simulations and real data are used to demonstrate the effectiveness of the proposed complex-valued pseudo-spectrum based VF-TBD (CPS-VF-TBD) in the complex-valued RD plane. For comparison, three methods, i.e., real pseudo-spectrum based VF-TBD (RPS-VF-TBD) [
34], log complex-value likelihood ratio based DP-TBD (LCLR-DP-TBD) [
28], and log real-value likelihood ratio based DP-TBD (LELR-DP-TBD) [
10] are considered. RPS-VF-TBD considers the spilled target energy for multiframe integration, LELR-DP-TBD uses log real-value likelihood ratio as DP merit function, and LCLR-DP-TBD uses log complex-value likelihood ratio for DP integration. In current multiframe integration methods, RPS-VF-TBD can obtain the best VF integration, while LCLR-DP-TBD demonstrates the best DP integration.
The detection probability and root mean square error (RMSE) are the two most commonly used performance measures in most TBD methods [
10,
28,
31,
32,
33,
34]. The detection probability is defined as the probability that the declared target is within 2 cells of the actual one, and the detection threshold is chosen according to false alarm rate
. The RMSE of estimation is defined as [
42]
where the actual target parameter and the
th estimated one are, respectively,
and
, and the number of simulations is
. Meanwhile, the computational time of different TBD methods are compared.
4.1. Numerical Simulations
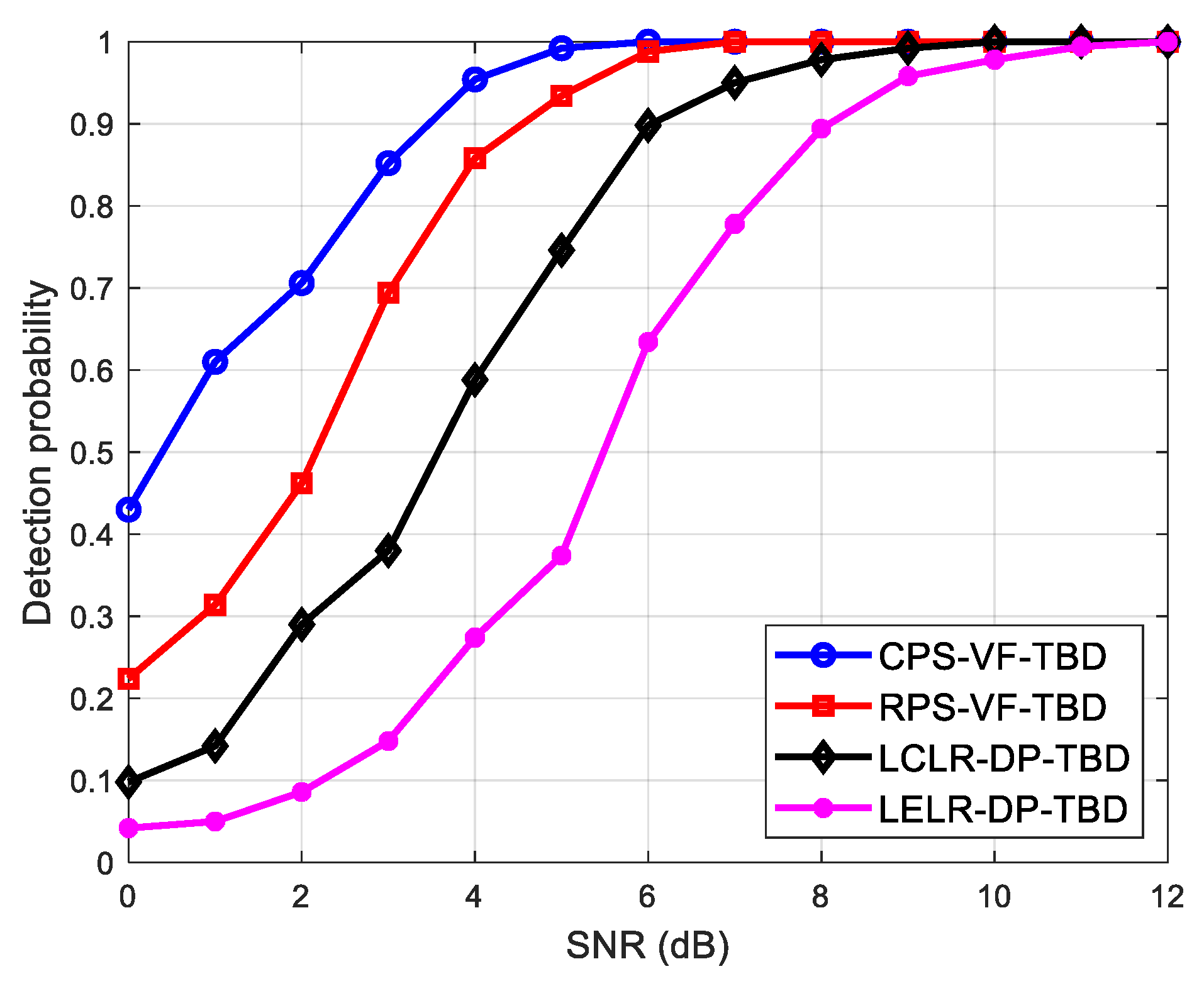
The range and Doppler resolution of each cell is 1 km and 1 m/s, and the initial target state is (160 km, 10 m/s, 150 km, 8 m/s). The envelope extents and are equal to 1. In some high-frequency ground wave radars, the frame interval for sea observation is larger than 100 s; in this simulation, the frame interval is set as 100 s. The target fluctuation is modeled as Rayleigh distribution, distribution with four degrees of freedom, Log-Normal distribution, Weibull distribution, and K distribution. The non-fluctuating target is also considered.
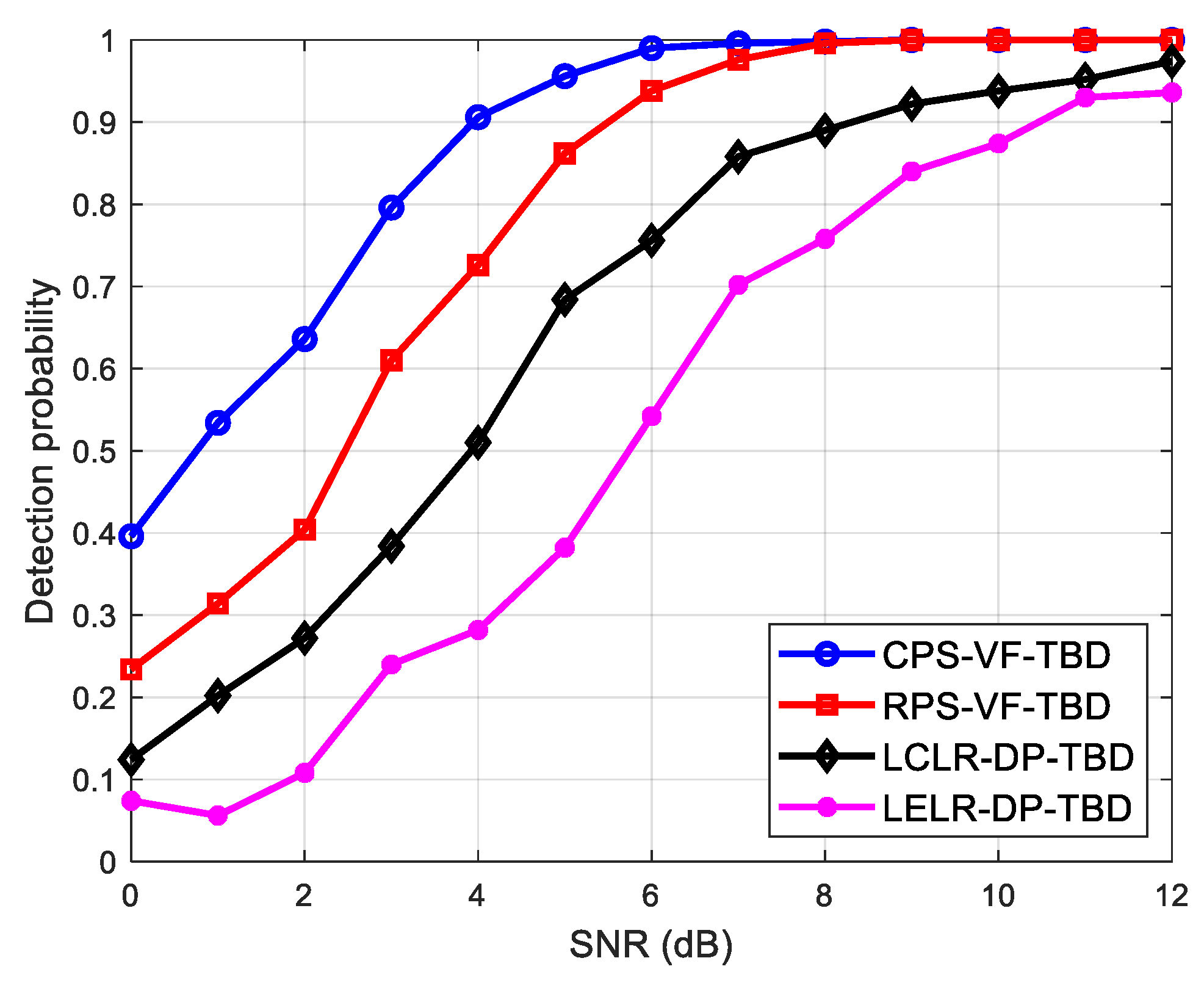
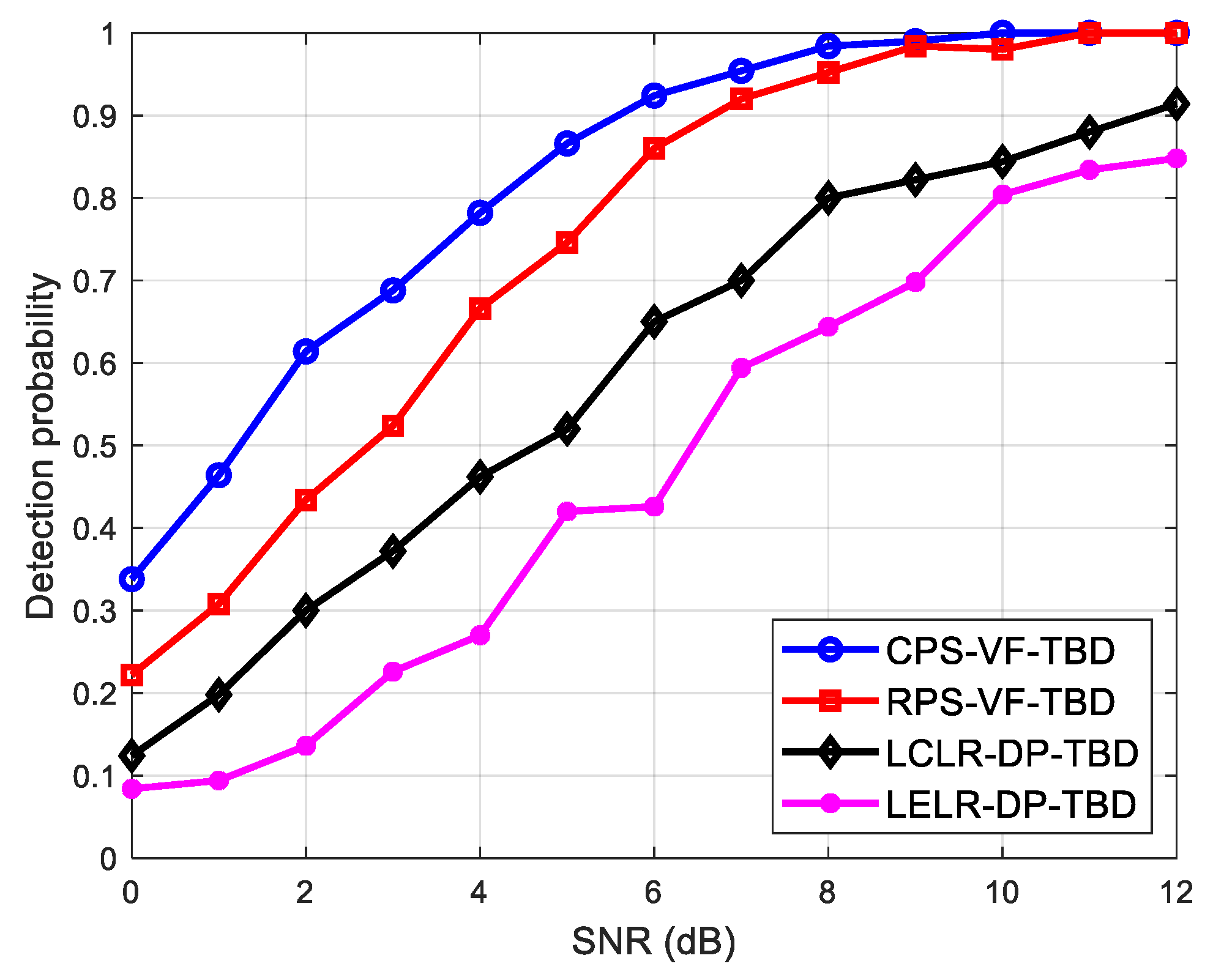
Figure 1 shows the comparison of detection probability among the proposed method and conventional RPS-VF-TBD, LCLR-DP-TBD, and LELR-DP-TBD in the case of non-fluctuation.
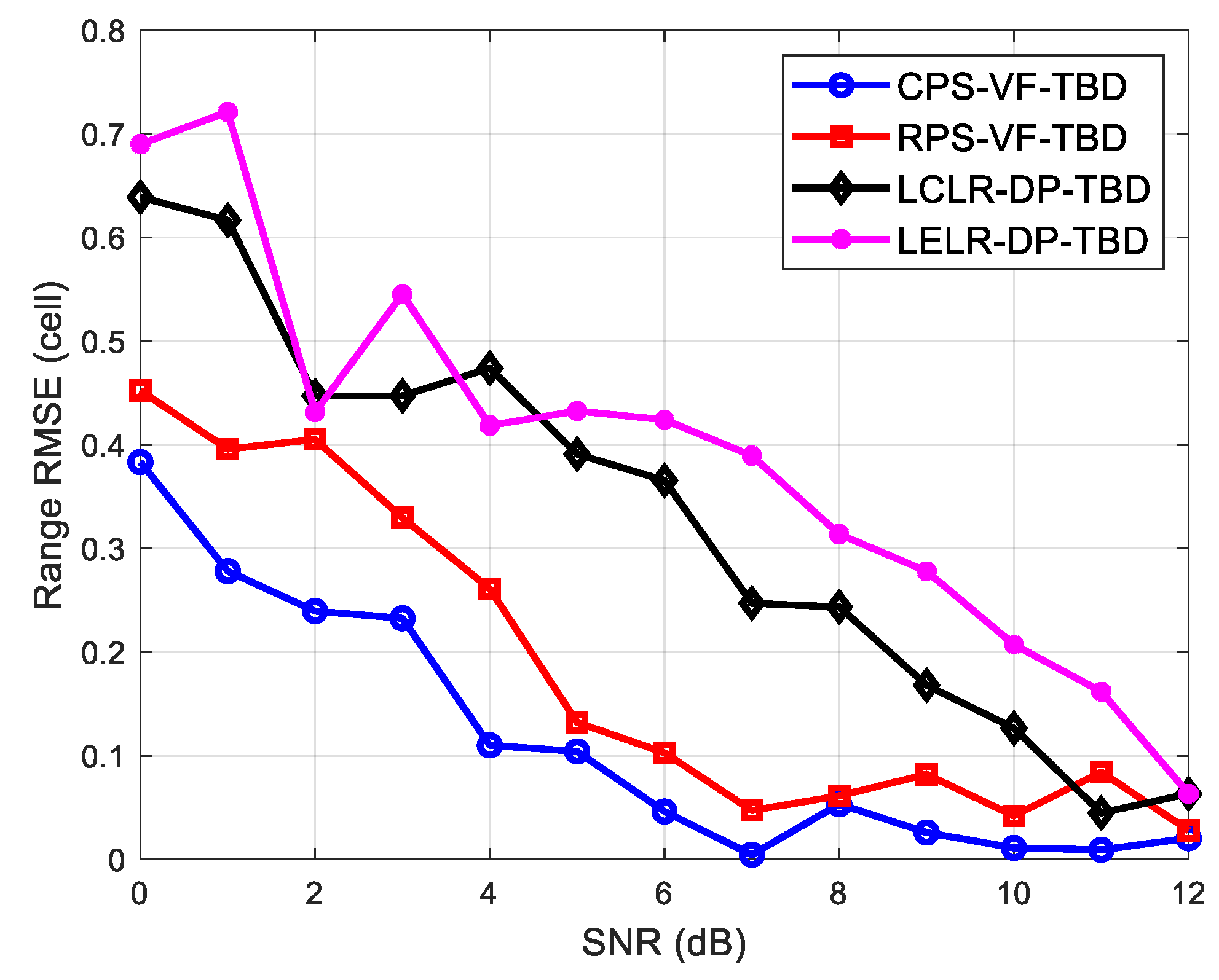
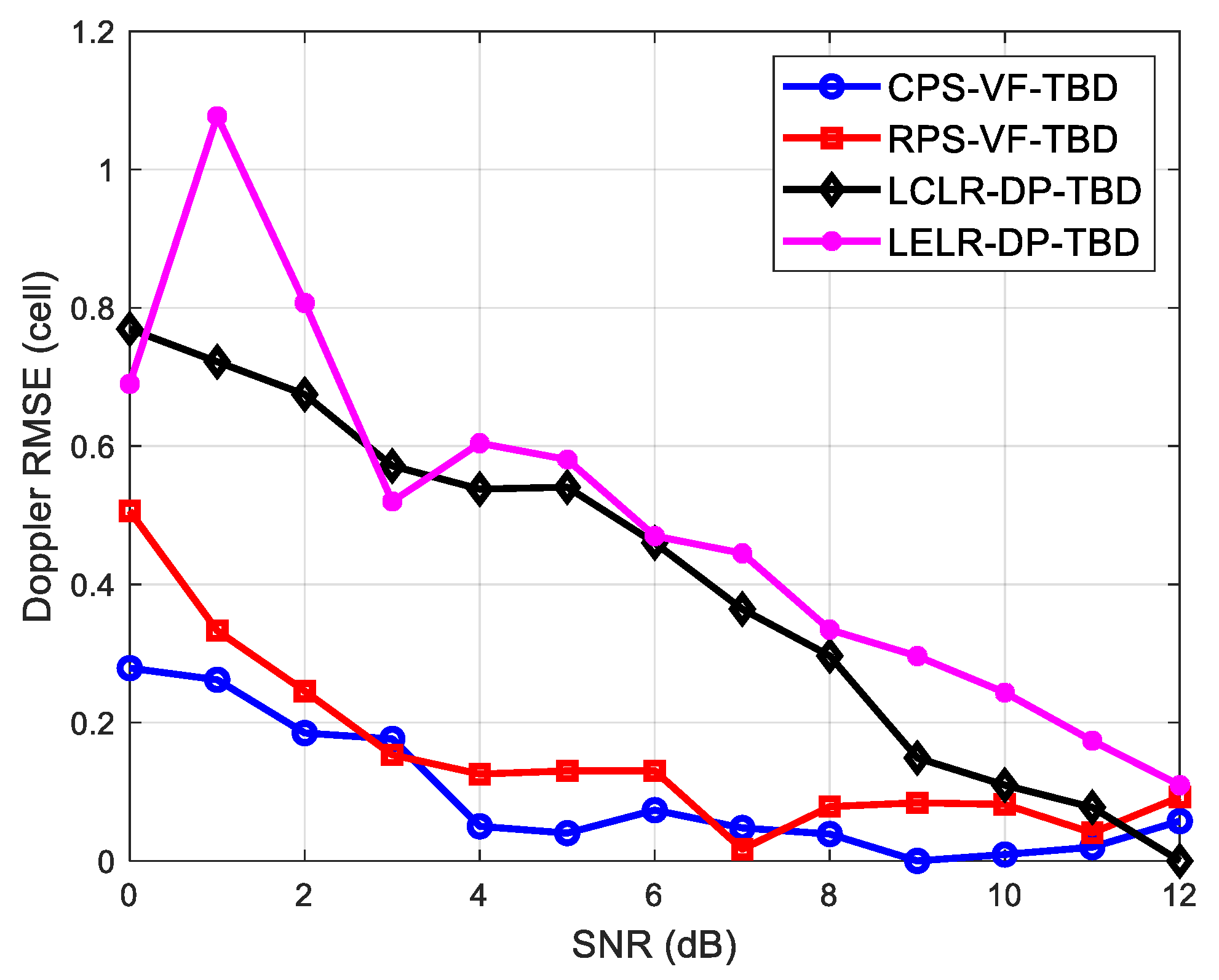
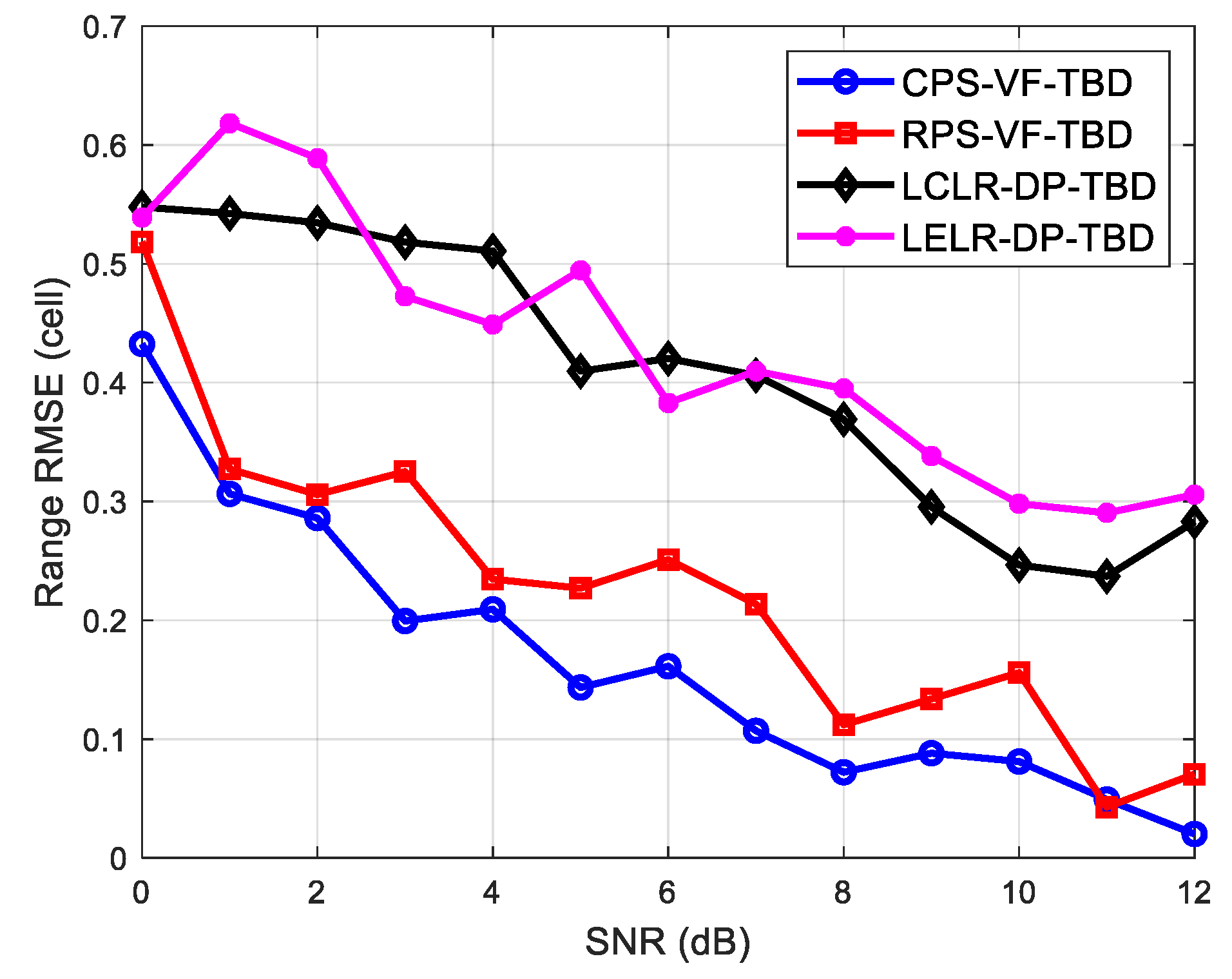
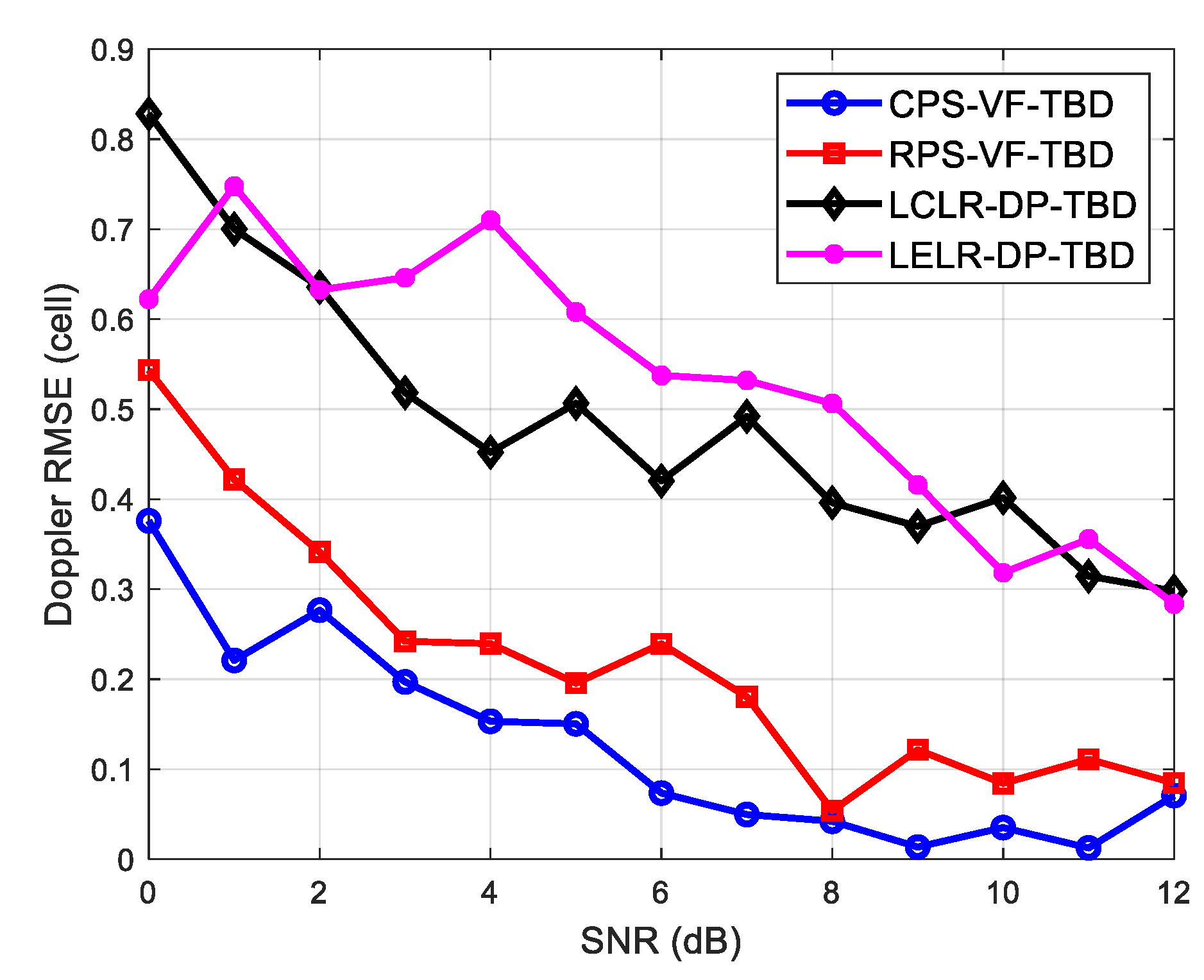
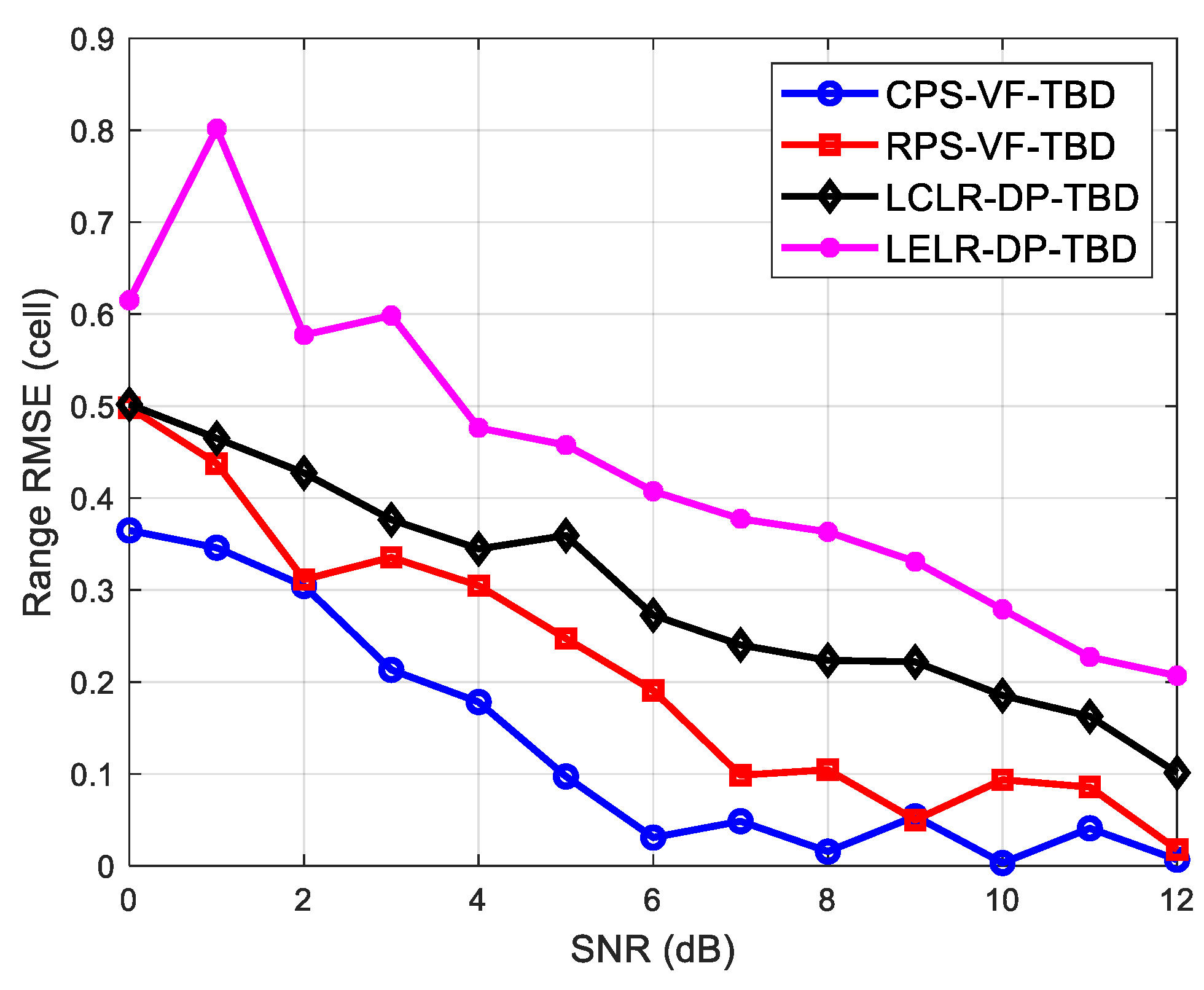
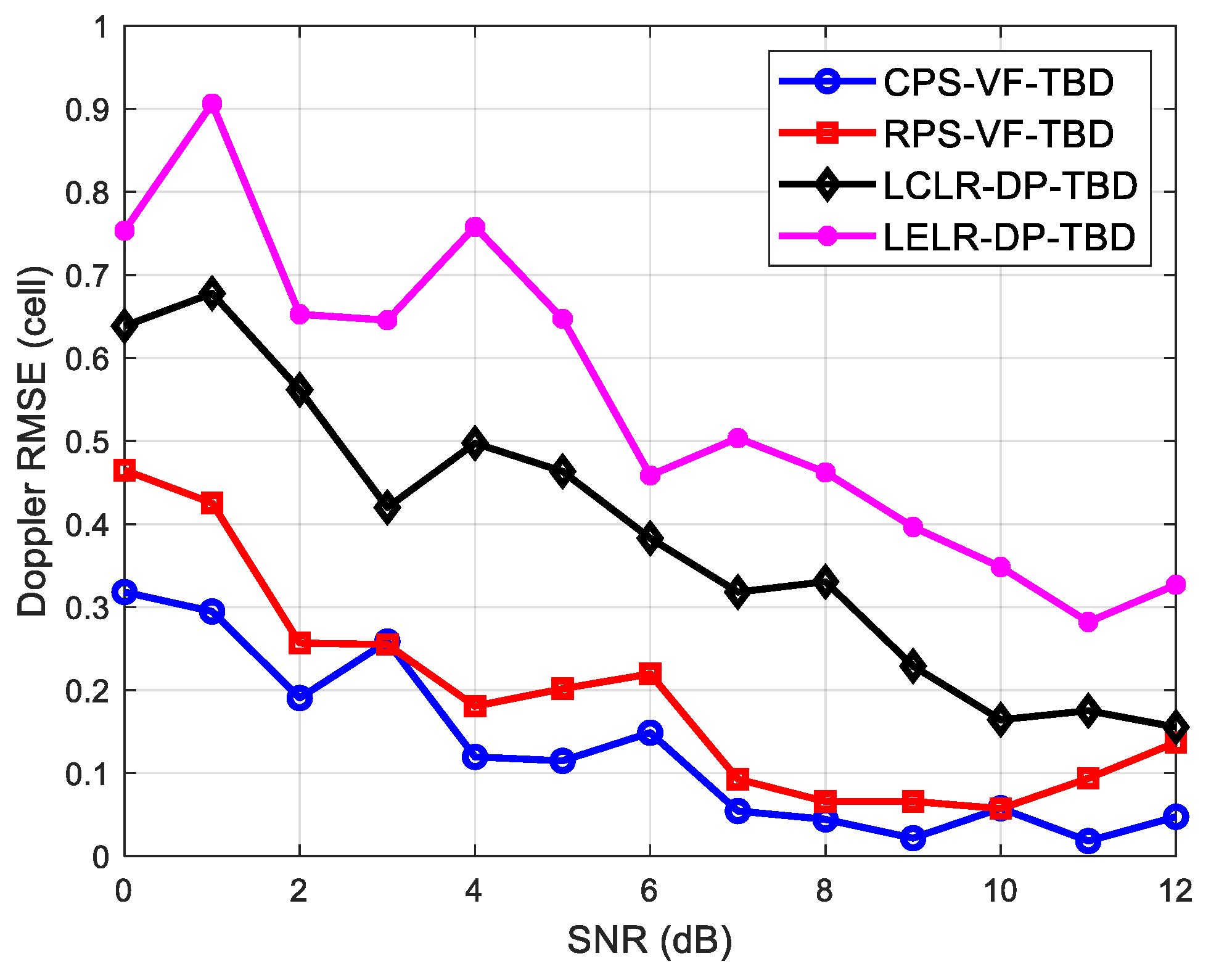
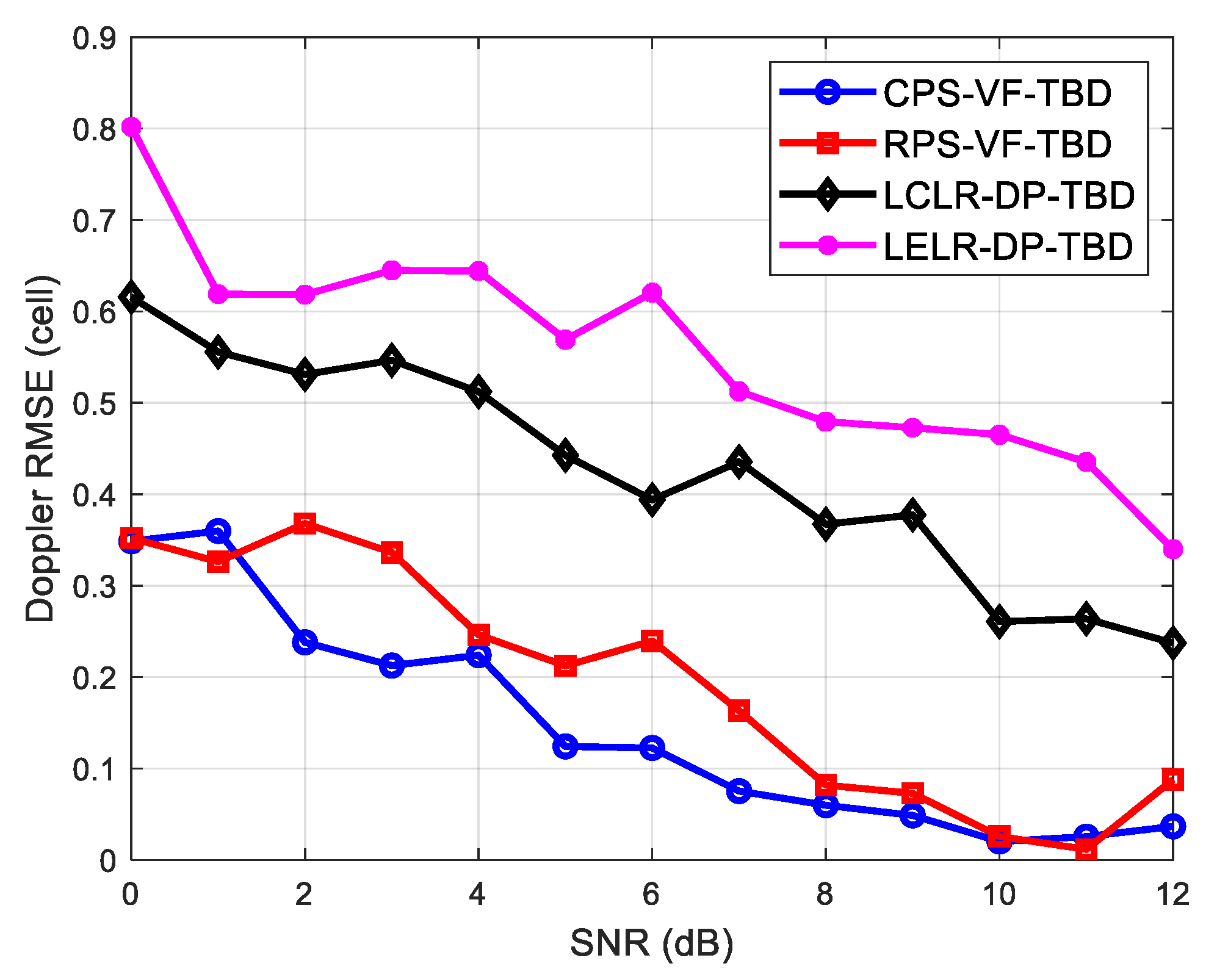
Figure 2 and
Figure 3 illustrate the comparison of range RMSE and Doppler RMSE among different TBD methods.
As illustrated in
Figure 1, VF-TBD methods demonstrate superior detection performance to DP-TBD methods. In DP-TBD methods, a basic assumption for integration is that the local maximum value originates from the target. However, in low SNR conditions, the noise value can be larger than the target echo value, leading to inaccurate integration. Meanwhile, existing DP-TBD methods are conducted based on the assumption of linear motion in the observed plane. However, a target with constant Cartesian velocity may behave nonlinearly in RD plane. The model mismatch in DP-TBD may lead to integration degradation. In VF-TBD methods, multiframe integration is conducted by matching the constant target velocity, the target energy can be integrated to the maximum when the assumed velocity is matched with the actual one, and the accurate RD model used in the proposed method is beneficial to multiframe integration. In addition, the proposed method performs better than RPS-VF-TBD. This owes to the use of additional phase information contained in complex-valued RD data. As illustrated in
Figure 2 and
Figure 3, the proposed method demonstrates the best estimation performance. In addition to the improvement of output SNR, the well-focused target output envelope is beneficial to parameter estimation.
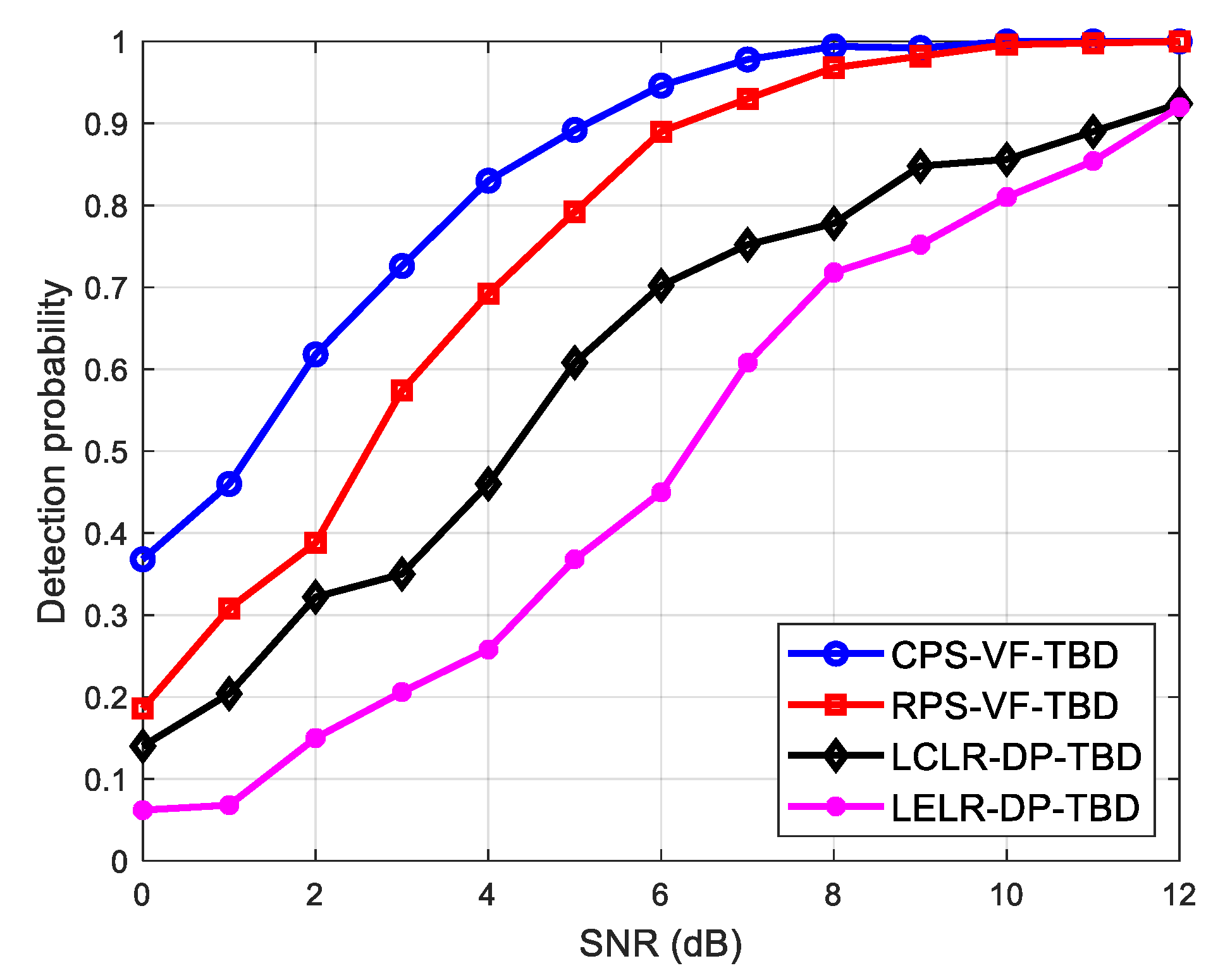
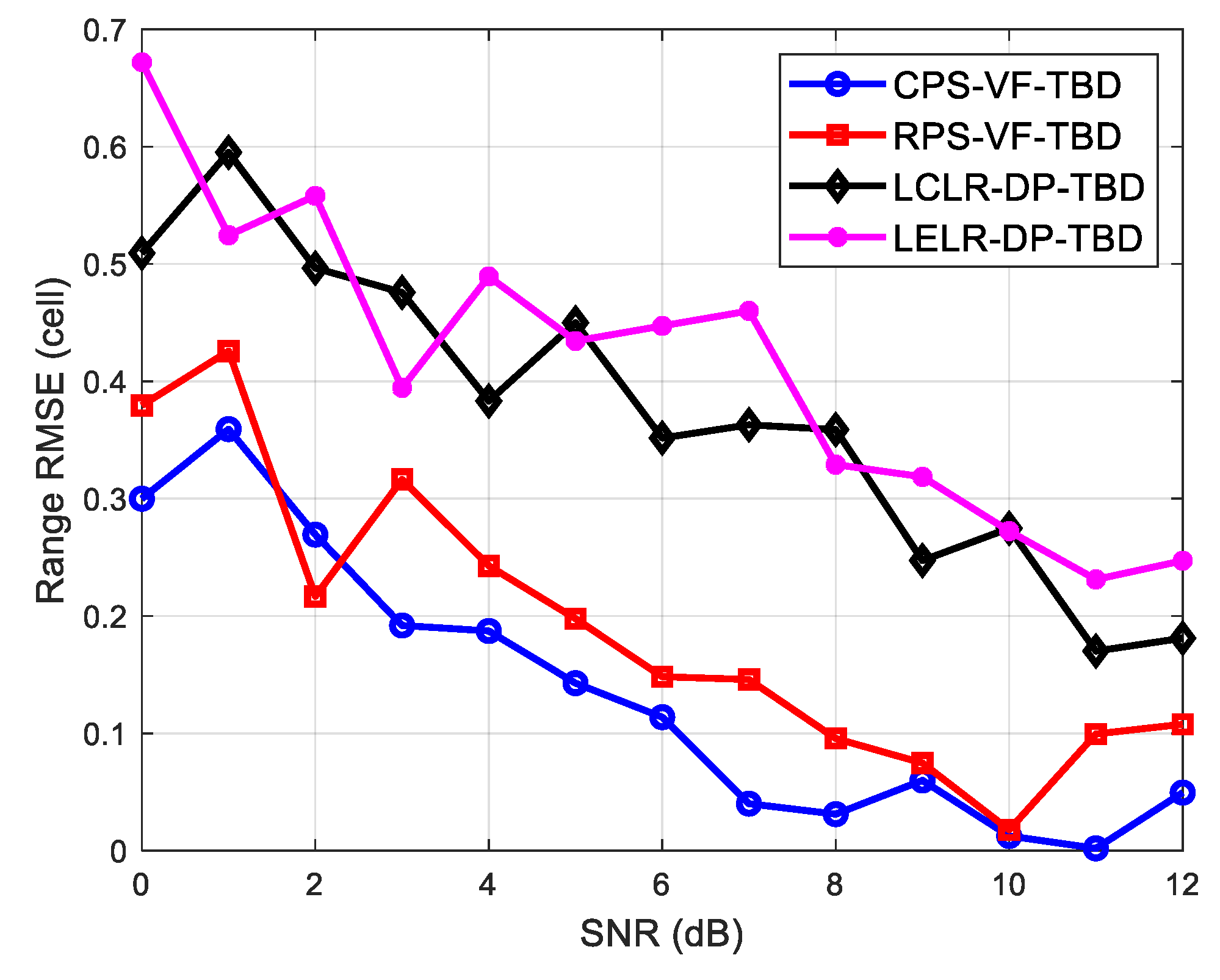
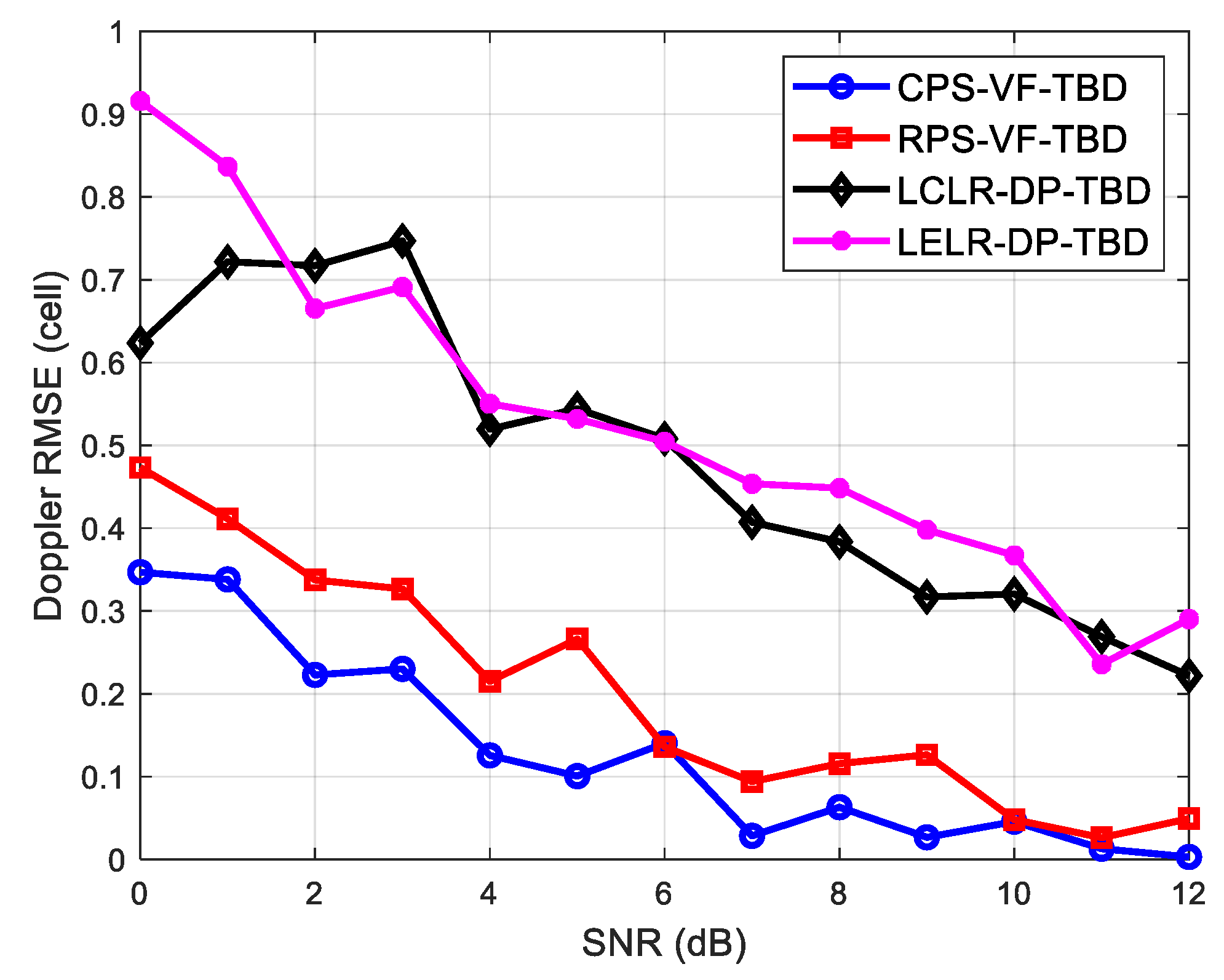
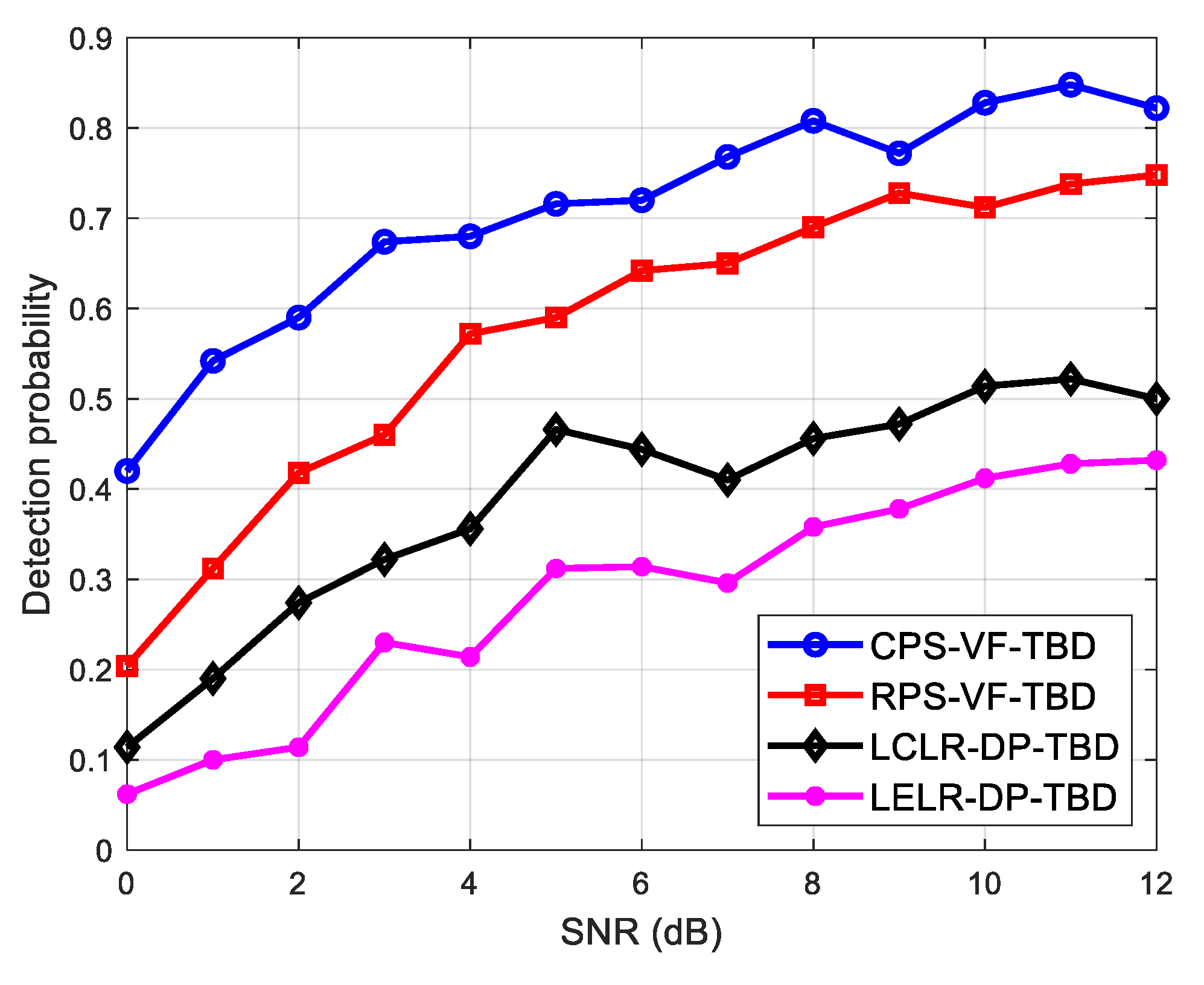
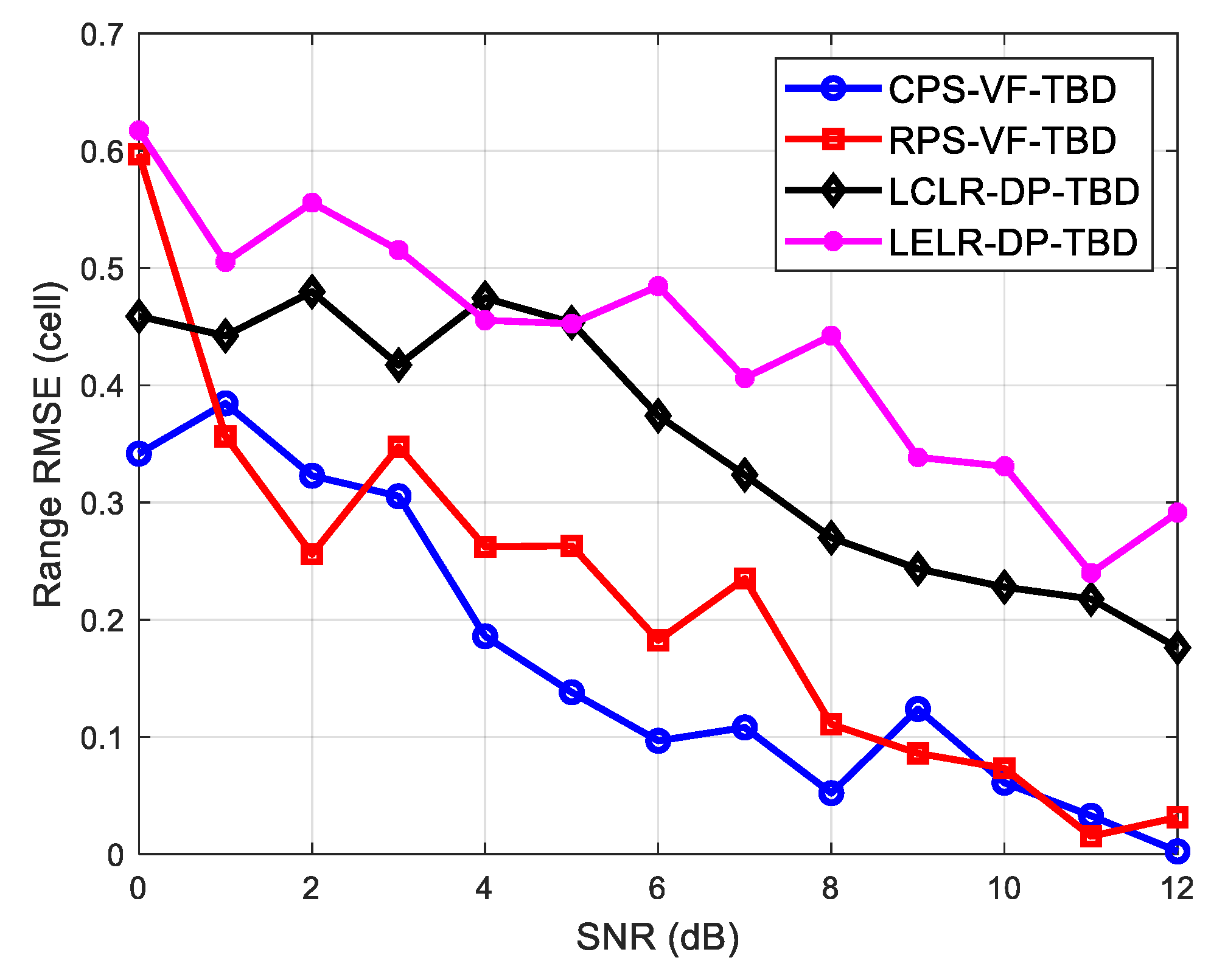
Figure 4 shows the comparison of detection probability among the proposed method and conventional RPS-VF-TBD, LCLR-DP-TBD, and LELR-DP-TBD in the case of Rayleigh distributed fluctuation.
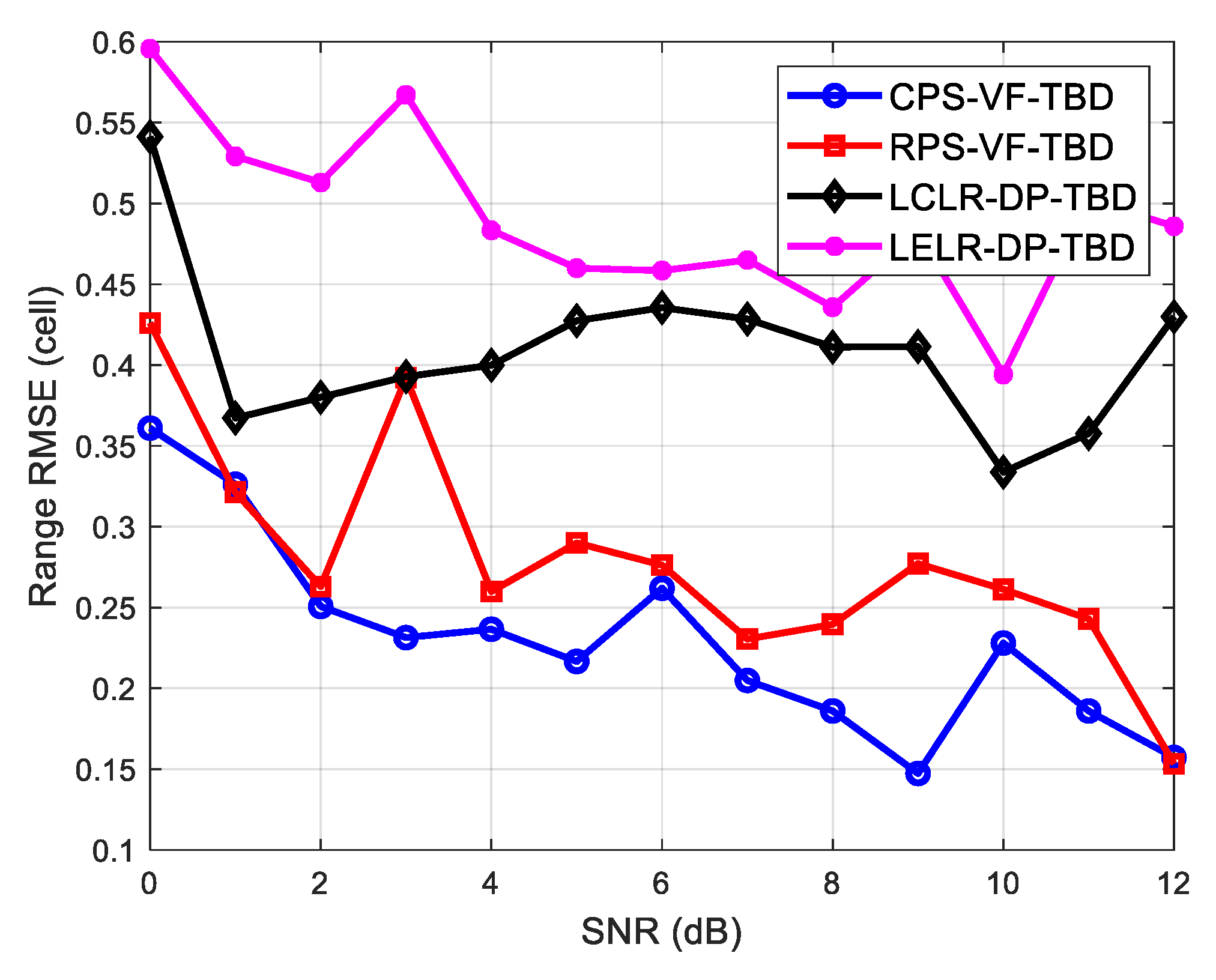
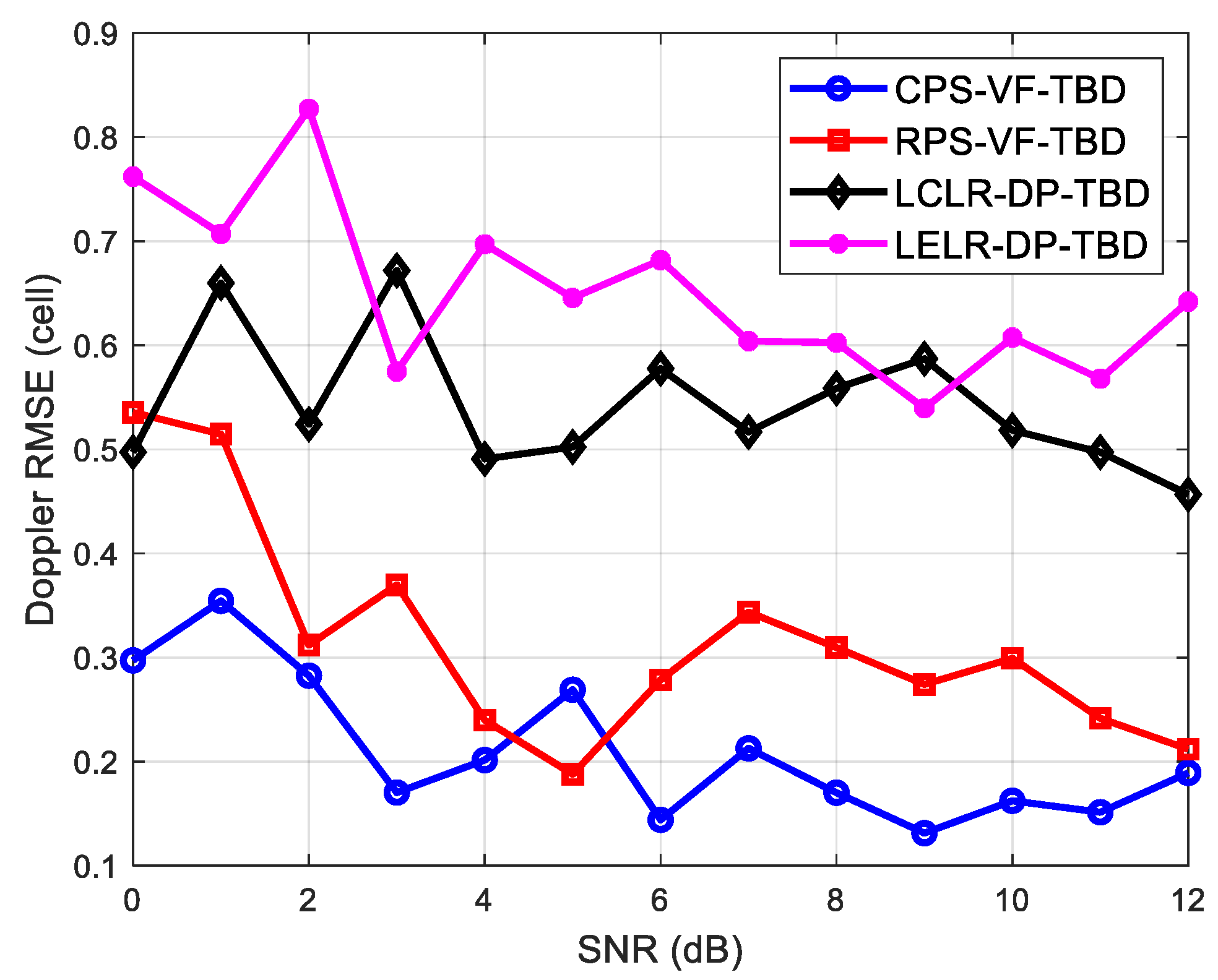
Figure 5 and
Figure 6 illustrate the comparison of range RMSE and Doppler RMSE among different TBD methods. As illustrated in these figures, due to the use of additional phase information and accurate RD evolution equation, the proposed method can obtain the superior performance in the case of the Rayleigh fluctuation.
Figure 7 shows the comparison of detection probability among the proposed method and conventional RPS-VF-TBD, LCLR-DP-TBD, and LELR-DP-TBD in the case of
distributed fluctuation with four degrees of freedom.
Figure 8 and
Figure 9 show the comparison of range RMSE and Doppler RMSE among different TBD methods. It can also be found in these figures that the proposed method performs best in the case of
fluctuation with four degrees of freedom.
Figure 10 shows the comparison of detection probability among the proposed method and conventional RPS-VF-TBD, LCLR-DP-TBD, and LELR-DP-TBD in the case of Log-Normal distributed fluctuation.
Figure 11 and
Figure 12 illustrate the comparison of range RMSE and Doppler RMSE among different TBD methods. Similarly, among these TBD methods, the proposed method can obtain the best detection and estimation performance in the case of Log-Normal fluctuation.
Figure 13 shows the comparison of detection probability among the proposed method and conventional RPS-VF-TBD, LCLR-DP-TBD, and LELR-DP-TBD in the case of Weibull distributed fluctuation.
Figure 14 and
Figure 15 illustrate the comparison of range RMSE and Doppler RMSE among different TBD methods. As discussed above, the proposed method enables full use of data information and accurate integration according to correct RD model. The proposed method demonstrates the best performance among the four TBD methods in the case of Weibull fluctuation.
Figure 16 shows the comparison of detection probability among the proposed method and conventional RPS-VF-TBD, LCLR-DP-TBD, and LELR-DP-TBD in the case of K distributed fluctuation.
Figure 17 and
Figure 18 illustrates the comparison of range RMSE and Doppler RMSE among different TBD methods. Similar to the discussion above, the detection and estimation performance of the proposed method is excellent in the case of K fluctuation.
The computational time of different TBD methods is compared in
Table 1. The second column of
Table 1 is the average computational time of 6 frames, according to 500 Monte Carlo simulations, while the third column is the average computational time of each frame. As illustrated in
Table 1, LCLR-DP-TBD has higher computational complexity than LELR-DP-TBD, since the computational complexity of complex-value addition is higher than that of the real-value addition. The same conclusion can be obtained from the comparison of CPS-VF-TBD and RPS-VF-TBD. It can be found that the proposed CPS-VF-TBD has the highest computational complexity. In addition to complex-value addition, the use of a filter bank for multiframe integration is another reason for increased complexity of CPS-VF-TBD.
4.2. Real Data
In this subsection, real data received from a ground-based radar is used to verify the performance of the proposed method.
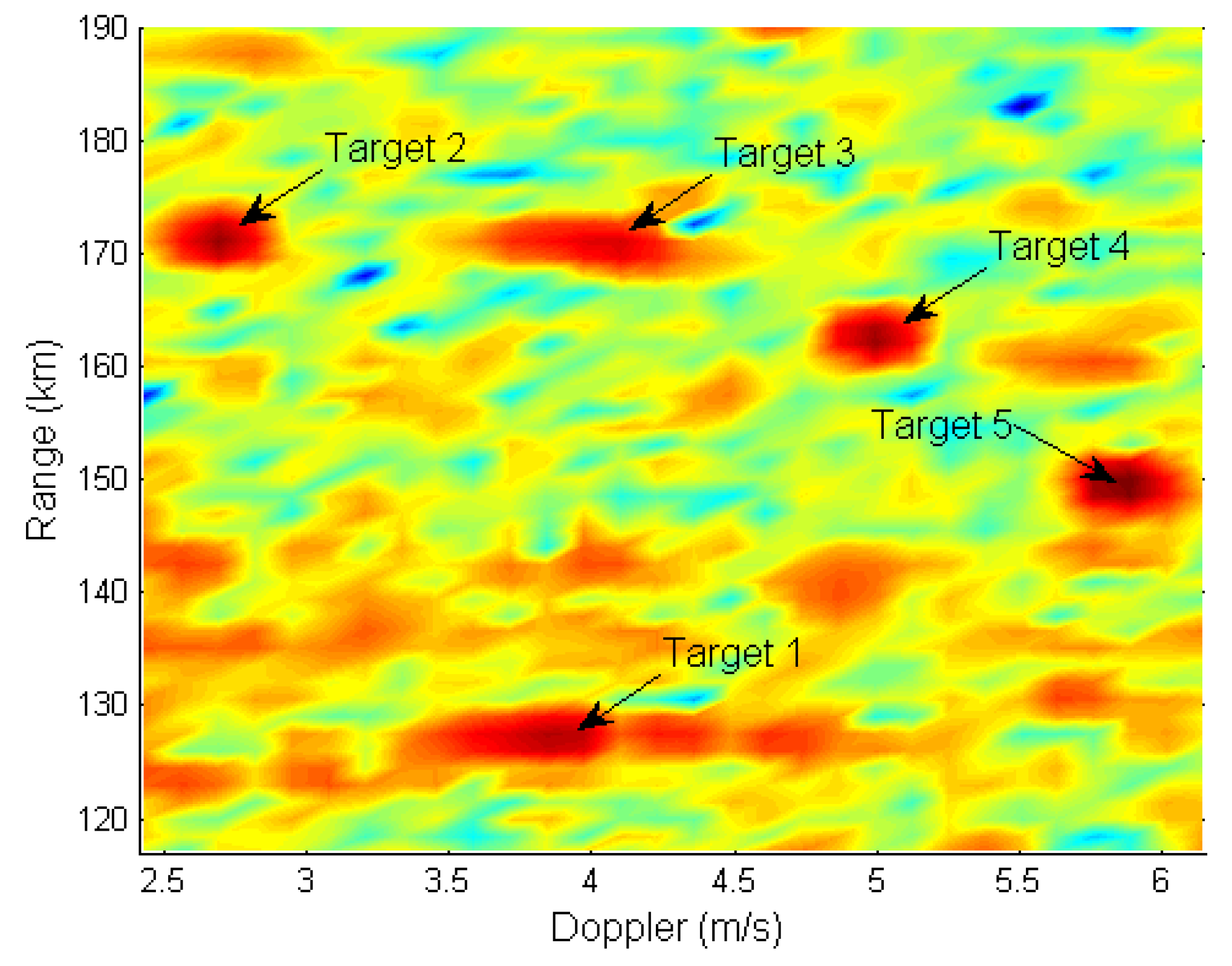
Figure 19 shows the single frame from real data, and there are five targets (i.e., Target 1, Target 2, Target 3, Target 4, and Target 5) in the observed region.
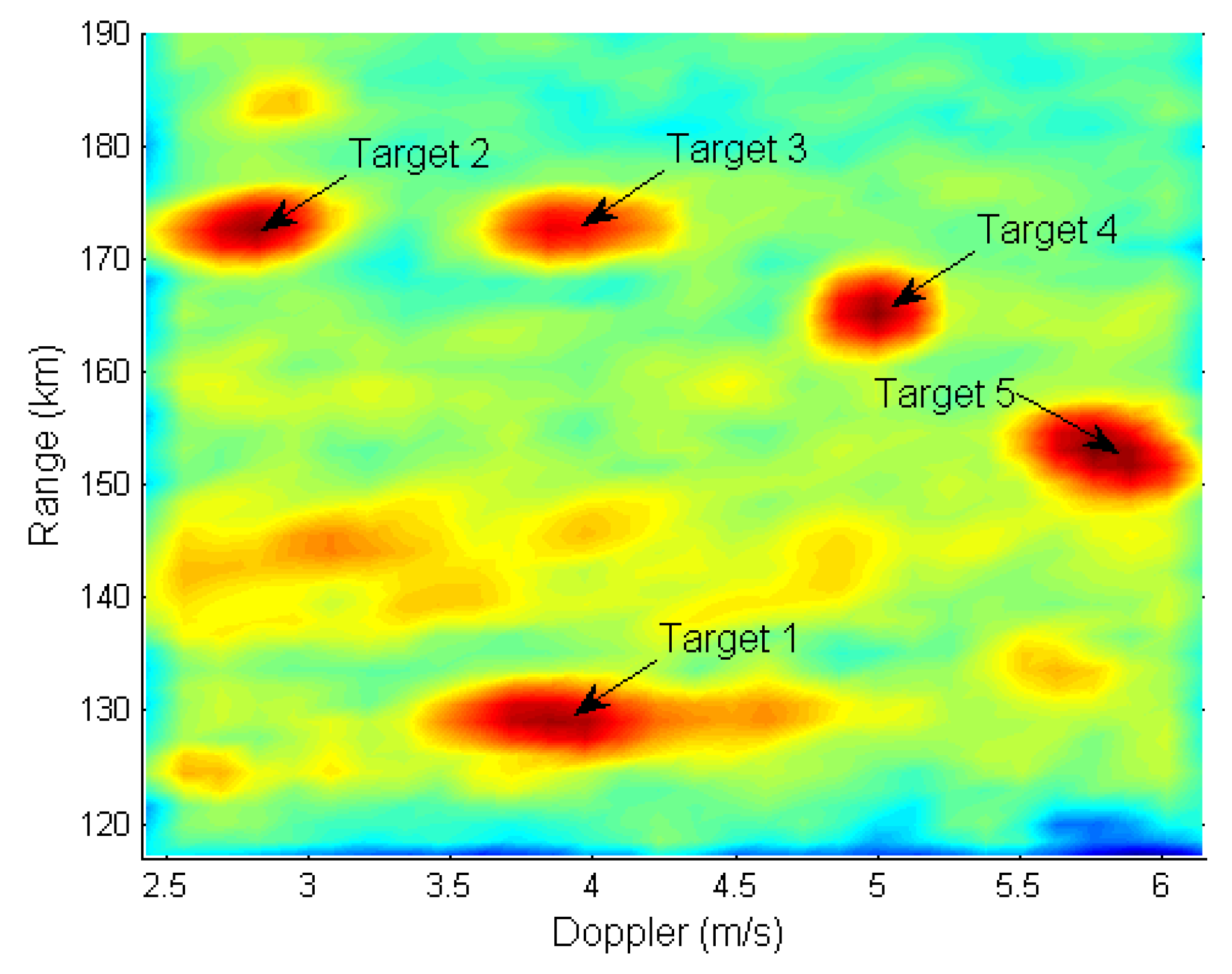
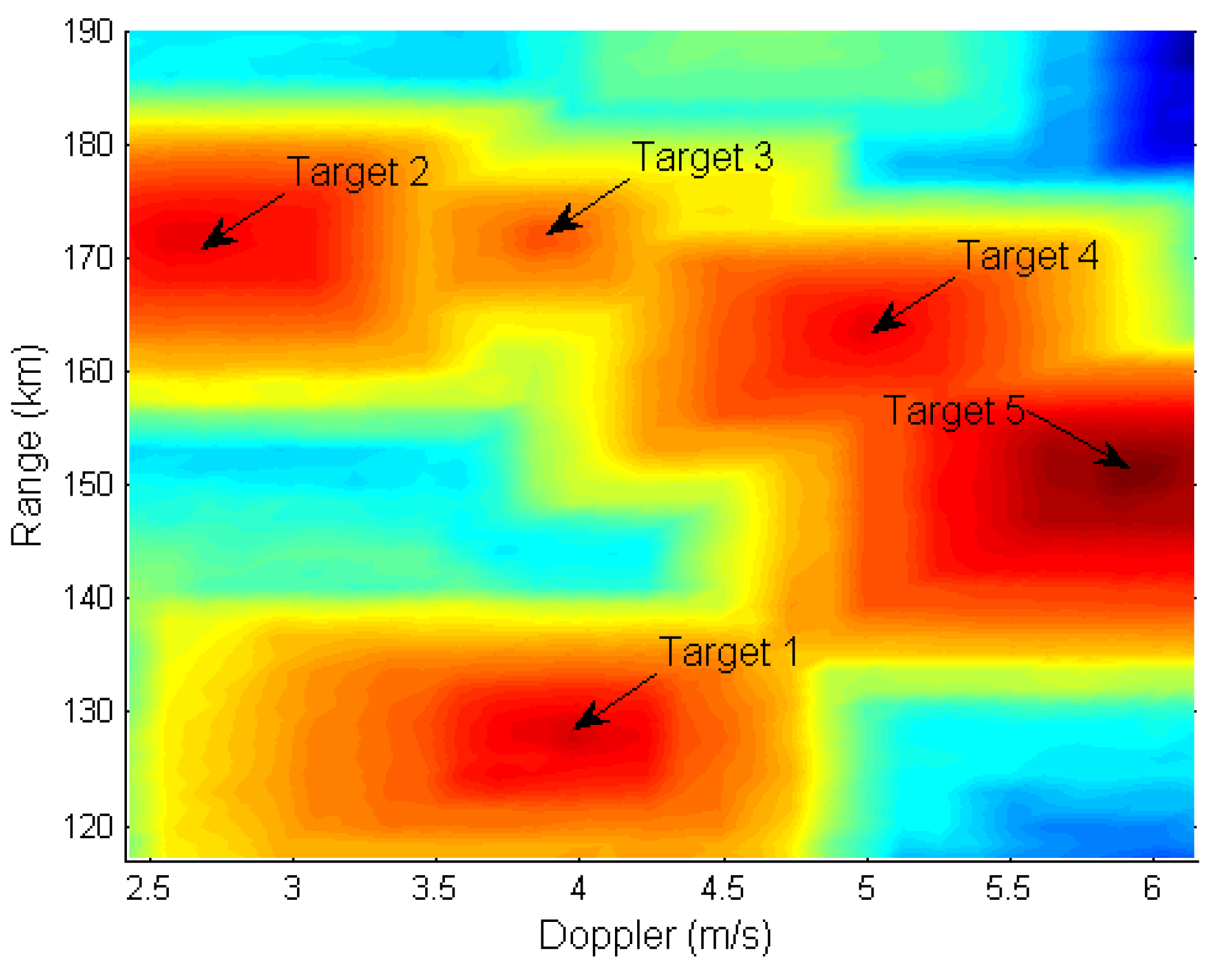
Figure 20 and
Figure 21 illustrate the integration results from the proposed method and DP based method, respectively, where the number of integration frames is 6. As illustrated in these two figures, the target SNR can be improved effectively, and the background noise and clutter can be suppressed after multiframe integration.
As illustrated in
Figure 21, the target envelope is extended to multiple cells due to the searching for the local maximum value. The extended target envelope is harmful for adjacent target detection and parameter estimation, since the extended envelopes of adjacent targets may be affected with each other negatively. In contrast, as illustrated in
Figure 20, the proposed method can focus well on the target envelope. In addition, due to the matching processing, the target speed can be estimated and the result is thus provided in
Table 2. The DP based method cannot obtain the target speed estimation. The additional speed estimation in the proposed method is beneficial to subsequent target tracking and data association.
5. Conclusions
In this paper, an improved TBD method was proposed for weak fluctuating targets in a complex-valued RD plane. The accurate RD model was derived, and a matched filtering based approach was proposed to make the best of both amplitude and phase information. Different fluctuation models were considered for track-before-detect in complex-valued RD plane. The pseudo-code for multiframe integration of the proposed method was described in detail. The target output envelope was derived theoretically, and the computational complexity was analyzed. Finally, both numerical simulations and real data were used to demonstrate the effectiveness of the proposed method. One potential application of the proposed method is to improve detection and estimation performance of weak targets in Doppler radars. In addition, the accurate RD evolution equation can be used for conventional target tracking with only range or range-Doppler measurements.
Although the proposed method in the paper has the advantages of high integration efficiency and output envelope focusing, it may suffer from performance degradation in the case of large motion uncertainty. In addition, due to the use of a filter bank, the computational complexity of the proposed method is high. Thus, the research on TBD of large motion uncertainty targets is one of our future studies. Reducing computational complexity of TBD is an urgent problem that will be considered in the future. Meanwhile, our future work might concern the study of TBD in realistic clutter backgrounds.



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}