
Integrability and Limit Cycles via First Integrals


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction to the Darboux Theory of Integrability
1.1. Polynomial Differential Systems
1.2. First Integrals
1.3. Integrating Factors
1.4. Invariant Algebraic Curves
1.5. Exponential Factors
1.6. The Method of Darboux
- (i)
- The function:is a first integral of system (1) if, and only if, there are , not all zero, such that: .
- (ii)
- When , there are , not all zero, satisfying .
- (iii)
- If , all orbits of the differential system (1) are contained in invariant algebraic curves, because the system has a rational first integral.
- (iv)
- (v)
- We defined . Since are invariant algebraic curves with cofactors, and and are exponential factors with cofactors , we have , and . Therefore, the statement (i) follows from the equality:
- (i)
- We obtained that is a first integral of system (9).
- (ii)
- Since the degree of the polynomial cofactors and is at most , we obtained that , the space of all polynomials of of a degree of at most . We observed that the vector space over has a dimension .
- (iii)
- Under the hypotheses of this statement, we applied statement (ii) to the two following subsets of functions formed by the invariant algebraic curves and the exponential factors. In this way, we obtained two linear dependencies between their corresponding cofactors, with which, after some relabeling and linear algebra, we could obtain:
- (iv)
- Since equality is equivalent to the equality:Therefore, statement (iv) was proved.
2. Limit Cycles in Piecewise Differential Systems via First Integrals
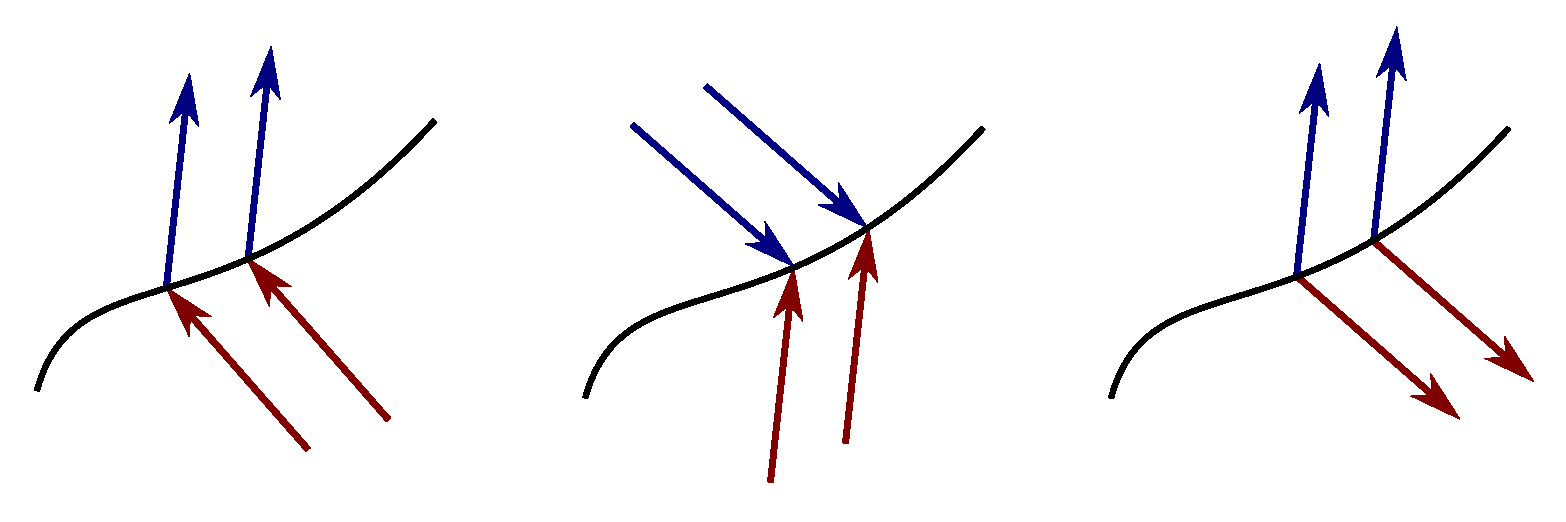
2.1. Discontinuous Piecewise Differential Systems
- (a)
- , the Crossing set.
- (b)
- , the Escaping set.
- (c)
- , the Sliding set.
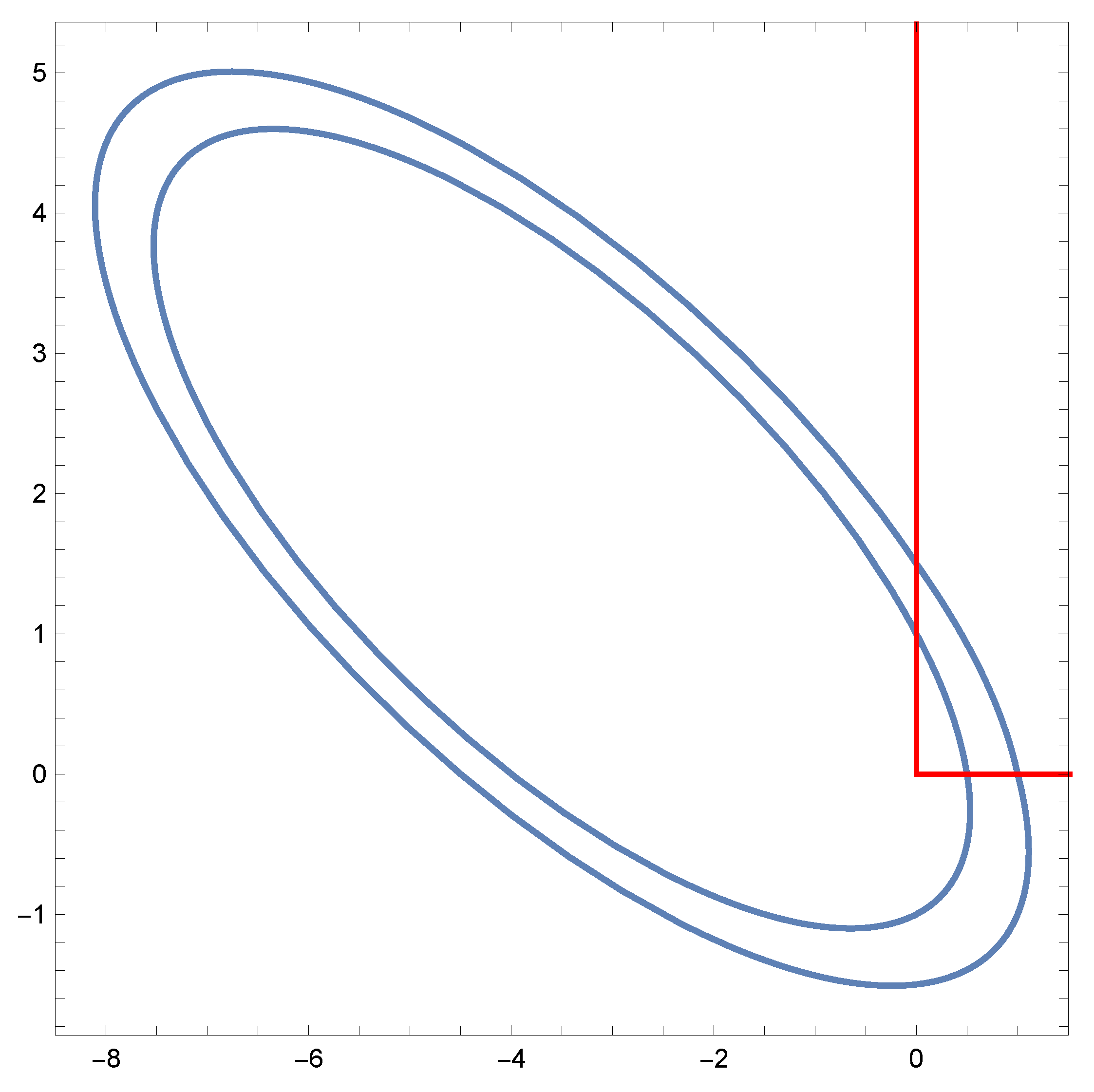
2.2. Limit Cycles of a Piecewise Differential System Formed by a Linear Differential System and a Quadratic Polynomial Differential System Separated by the Straight Line
2.3. Limit Cycles of Piecewise Differential Systems Formed by Three Linear Centers
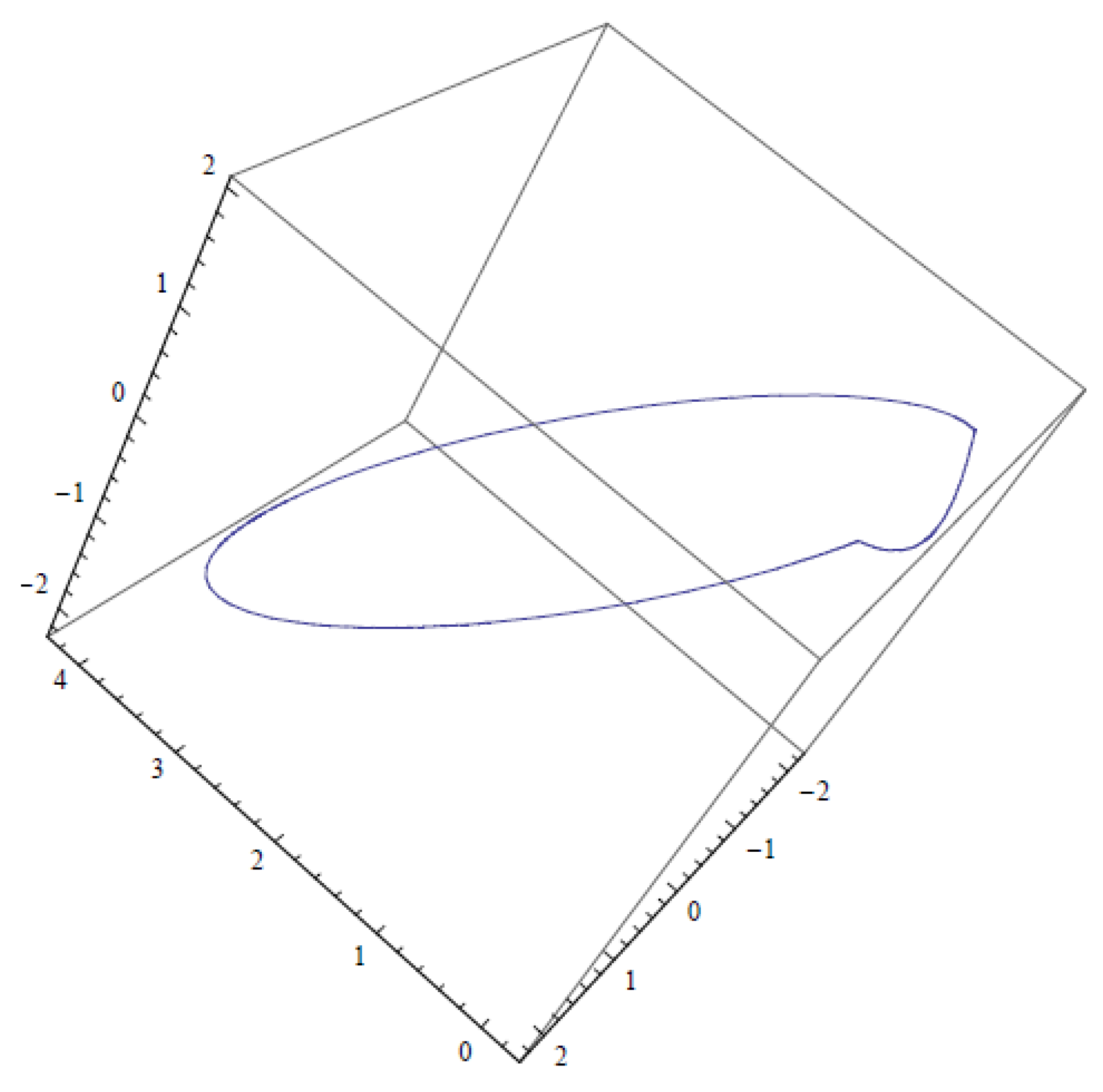
2.4. Periodic Orbits of a Relay System in
- (a)
- (b)
- For every pair of points and with and , the discontinuous piecewise linear differential system (19) has a periodic orbit γ intersecting in these two points.
- if , each trajectory has one endpoint in ;
- if either or and , each trajectory has one endpoint in ;
- andif and , the first trajectory has its two endpoints at the points in , and the second trajectory has its endpoints at infinity.
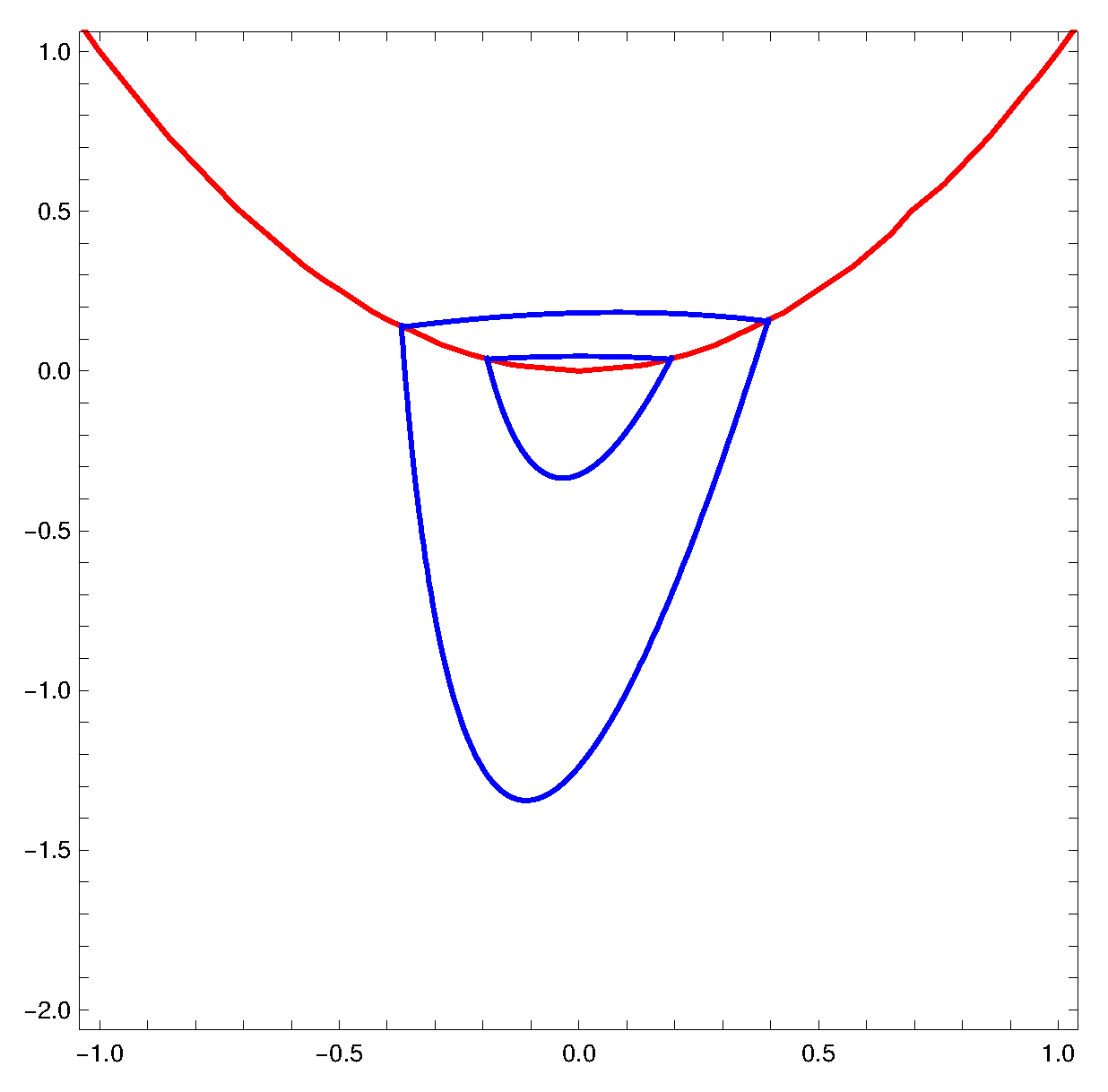
2.5. Limit Cycles of a Class of Piecewise Differential Systems Separated by a Parabola
2.6. Piecewise Differential System with a Non-Regular Discontinuity Line
3. Discussion
4. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Whittaker, E.T. A Treatise on the Analytical Dynamics of Particles and Rigid Bodies; Cambridge Mathematical Library, Cambridge University Press: Cambridge, UK, 1988. [Google Scholar]
- Dumortier, F.; Llibre, J.; Artés, J.C. Qualitative Theory of Planar Differential Systems; UniversiText; Springer: New York, NY, USA, 2006. [Google Scholar]
- Olver, P.J. Applications of Lie Groups to Differential Equations, 2nd ed.; Graduate Texts in Mathematics; Springer: New York, NY, USA, 1993; Volume 107. [Google Scholar]
- di Bernardo, M.; Budd, C.J.; Champneys, A.R.; Kowalczyk, P. Piecewise-Smooth Dynamical Systems: Theory and Applications; Applied Mathematical Sciences; Springer: London, UK, 2008; Volume 163. [Google Scholar]
- Leine, R.I.; Nijmeijer, H. Dynamics and Bifurcations of Non-Smooth Mechanical Systems; Lecture Notes in Applied and Computational Mechanics; Springer: Berlin/Heidelberg, Germany, 2004; Volume 18. [Google Scholar]
- Liberzon, D. Switching in Systems and Control: Foundations and Applications; Birkhäuse: Boston, MA, USA, 2003. [Google Scholar]
- Simpson, D.J.W. Bifurcations in Piecewise-Smooth Continuous Systems; World Scientific Series on Nonlinear Science Series A; World Scientific: Singapore, 2010; Volume 69. [Google Scholar]
- Makarenkov, O.; Lamb, J.S.W. Dynamics and bifurcations of nonsmooth systems: A survey. Physica D 2012, 241, 1826–1844. [Google Scholar] [CrossRef] [Green Version]
- Filippov, A.F. Differential Equations with Discontinuous Right-Hand Sides; Kluwer Academic: Dordrecht, The Netherlands, 1988. [Google Scholar]
- Lum, R.; Chua, L.O. Global propierties of continuous piecewise-linear vector fields. Part I: Simplest case in ℝ2. Int. J. Circuit Theory Appl. 1991, 19, 251–307. [Google Scholar] [CrossRef]
- Huan, S.M.; Yang, X.S. Existence of limit cycles in general planar piecewise linear systems of saddle–saddle dynamics. Nonlinear Anal. 2013, 92, 82–95. [Google Scholar] [CrossRef]
- Braga, D.C.; Mello, L.F. Limit cycles in a family of discontinuous piecewise linear differential systems with two zones in the plane. Nonlinear Dynam. 2013, 73, 1283–1288. [Google Scholar] [CrossRef]
- Buzzi, C.; Gasull, A.; Torregrosa, J. Algebraic limit cycles in piecewise linear differential systems. Int. J. Bifurc. Chaos 2018, 28, 1850039. [Google Scholar] [CrossRef]
- Buzzi, C.; Pessoa, C.; Torregrosa, J. Piecewise linear perturbations of a linear center. Discret. Contin. Dyn. Syst. 2013, 33, 3915–3936. [Google Scholar] [CrossRef] [Green Version]
- Freire, E.; Ponce, E.; Rodrigo, F.; Torres, F. Bifurcation sets of continuous piecewise linear systems with two zones. Int. J. Bifurc. Chaos 1998, 8, 2073–2097. [Google Scholar] [CrossRef]
- Freire, E.; Ponce, E.; Torres, F. Canonical Discontinuous Planar Piecewise Linear Systems. SIAM J. Appl. Dyn. Syst. 2012, 11, 181–211. [Google Scholar] [CrossRef]
- Freire, E.; Ponce, E.; Torres, F. A general mechanism to generate three limit cycles in planar Filippov systems with two zones. Nonlinear Dyn. 2014, 78, 251–263. [Google Scholar] [CrossRef]
- Giannakopoulos, F.; Pliete, K. Planar systems of piecewise linear differential equations with a line of discontinuity. Nonlinearity 2001, 14, 1611–1632. [Google Scholar] [CrossRef]
- Han, M.; Zhang, W. On Hopf bifurcation in non—Smooth planar systems. J. Differ. Equ. 2010, 248, 2399–2416. [Google Scholar] [CrossRef] [Green Version]
- Huan, S.M.; Yang, X.S. On the number of limit cycles in general planar piecewise systems. Discret. Cont. Dyn. Syst. Ser. A 2012, 32, 2147–2164. [Google Scholar] [CrossRef]
- Li, L. Three crossing limit cycles in planar piecewise linear systems with saddle-focus type. Electron. J. Qual. Theory Differ. Equ. 2014, 70, 1–14. [Google Scholar] [CrossRef]
- Wang, J.; Huang, C.; Huang, L. Discontinuity-induced limit cycles in a general planar piecewise linear system of saddle-focus type. Nonlinear Anal. Hybrid Syst. 2019, 33, 162–178. [Google Scholar] [CrossRef]
- Chen, H.; Li, D.; Xie, J.; Yue, Y. Limit cycles in planar continuous piecewise linear systems. Commun. Nonlinear Sci. Numer. Simul. 2017, 47, 438–454. [Google Scholar] [CrossRef]
- Falconi, M.; Llibre, J. n − 1 independent first integrals for Linear differential systems in ℝn and ℂn. Qual. Theory Dyn. Syst. 2004, 4, 233–254. [Google Scholar] [CrossRef]
- Schlomiuk, D. Algebraic particular integrals, integrability and the problem of the center. Trans. Am. Math. Soc. 1993, 338, 799–841. [Google Scholar] [CrossRef]
- Llibre, J.; Zhang, X. Limit cycles created by piecewise linear centers. Chaos 2019, 29, 053116. [Google Scholar] [CrossRef] [PubMed]
- Llibre, J.; Teixeira, M.A. Periodic orbits of continuous and discontinuous piecewise linear differential systems via first integrals. Sao Paulo J. Math. Sci. 2018, 12, 121–135. [Google Scholar] [CrossRef] [Green Version]
- Anosov, D.V. Stability of the equilibrium positions in relay systems. Avtomatika i Telemehanika 1959, 20, 135–149. [Google Scholar]
- Benterki, R.; Llibre, J. Crossing Limit cycles of planar piecewise linear Hamiltonian systems without equilibrium points. Mathematics 2020, 8, 755. [Google Scholar] [CrossRef]
- Esteban, M.; Llibre, J.; Valls, C. The extended 16-th Hilbert problem for discontinuous piecewise isochronous centers of degree one or two separated by a straight line. Int. J. Bifurc. Chaos 2021, 31, 043112. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Llibre, J. Integrability and Limit Cycles via First Integrals. Symmetry 2021, 13, 1736. https://doi.org/10.3390/sym13091736
Llibre J. Integrability and Limit Cycles via First Integrals. Symmetry. 2021; 13(9):1736. https://doi.org/10.3390/sym13091736
Chicago/Turabian StyleLlibre, Jaume. 2021. "Integrability and Limit Cycles via First Integrals" Symmetry 13, no. 9: 1736. https://doi.org/10.3390/sym13091736
APA StyleLlibre, J. (2021). Integrability and Limit Cycles via First Integrals. Symmetry, 13(9), 1736. https://doi.org/10.3390/sym13091736