Fault Diagnosis of High-Speed Brushless Permanent-Magnet DC Motor Based on Support Vector Machine Optimized by Modified Grey Wolf Optimization Algorithm


Abstract
1. Introduction
2. Literature Review
3. Method
3.1. Gray Wolf Optimization
- Step1:
- Calculate the fitness of individual in the population. The best fitness of three wolves in the population were marked as , and . The rest was marked as . In other words, the optimization process of GWO is guided by three optimal solutions () in each generation population.
- Step2:
- Surround the prey. When the wolf group is close to its prey, it will slowly approach and surround the prey. The mathematical expressions are as follows.where, is the prey position; is the position of the t-generation gray wolf; C is the swing coefficient; A is the convergence coefficient; r1 and r2 are the random vector in [0, 1]; a is the convergence factor which determines the convergence coefficient A, the mathematical expression of a is as follows:where, Tmax is the maximum number of iterations.
- Step3:
- Prey. When wolf which would lead the pack to attack the prey finds its prey. In this case, the wolf , and would attack the prey together, and their positions with the prey can be expressed by the Formulas (6)–(12).where, D represents the distance between the wolf and its prey. C1 represents the random disturbance value of the wolf ; X1 represents position of the wolf at iteration t. In the same way, C2 and C3 represent respectively the random disturbance value of the wolf and the wolf ; X2 and X3 represent position of the wolf and the wolf at iteration t respectively.
3.2. Modified Gray Wolf Optimization
3.2.1. Chaotic Sequences Based on Tent Map
3.2.2. Sine Wave Dynamic Adaptive Factor
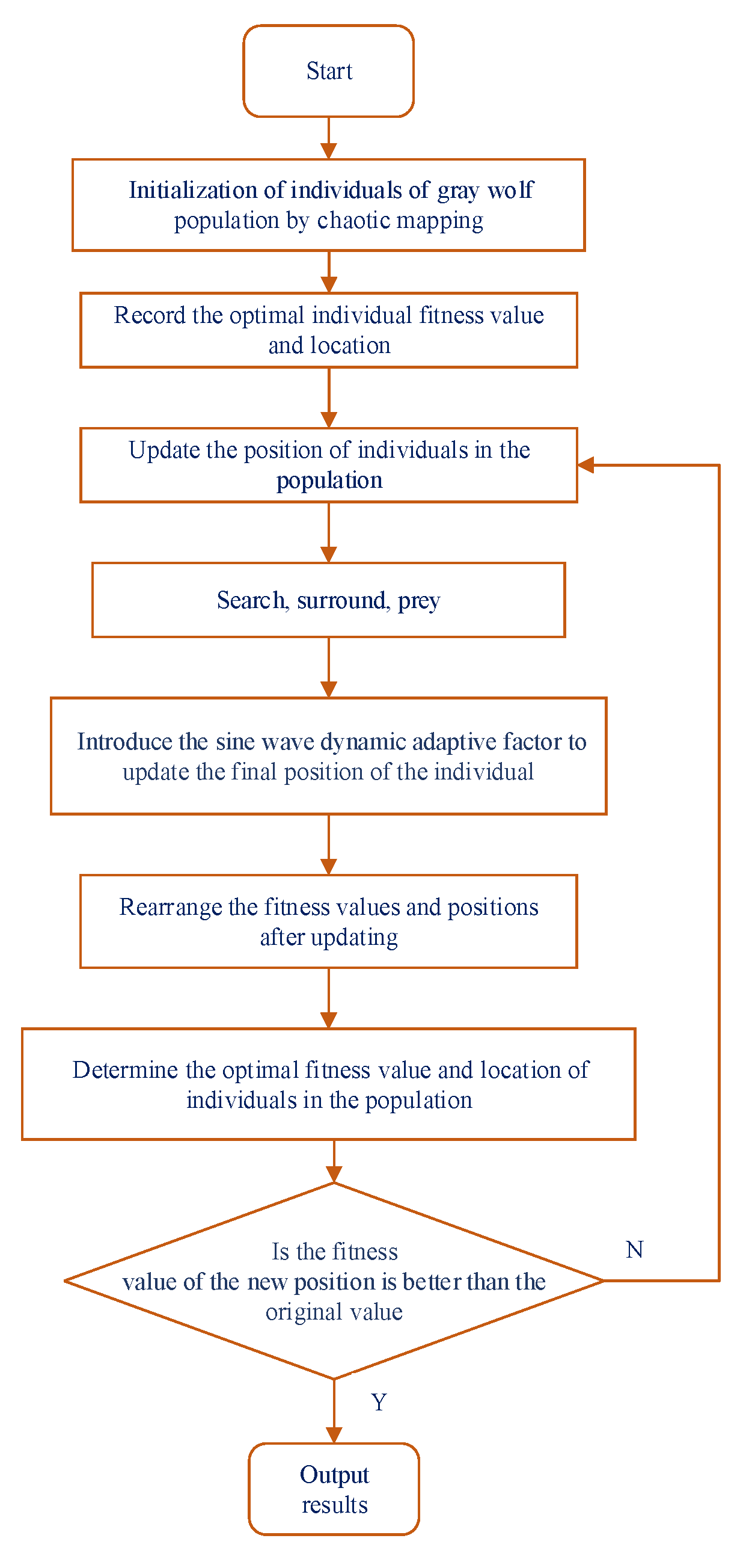
3.3. Steps of Modified Gray Wolf Optimization Algorithm
- (1)
- Initialize the parameters of GWO: set the population number of N; the maximum number of iterations Tmax; candidate solution dimension D, etc.
- (2)
- The chaotic sequences based on tent map was used to the initialization of the GWO, and the fitness value was calculated. According to the fitness value, the gray wolf population was classified into the wolf , , and .
- (3)
- Update parameters a, A and C of GWO.
- (4)
- Update the positions of each wolf and add sine wave dynamic adaptive factor into the final position update formula of each individual.
- (5)
- Rearrange the fitness value and the position of population after update. If the fitness value of the updated position is better, the updated position is retained. Otherwise, the new position is ignored.
- (6)
- Determine whether better convergence accuracy is achieved. If reached, end the search and output the position of . Otherwise, go back to step 2.
3.4. Algorithm Testing
4. Construction of MGWO-SVM Fault Diagnosis Model
4.1. Support Vector Machine
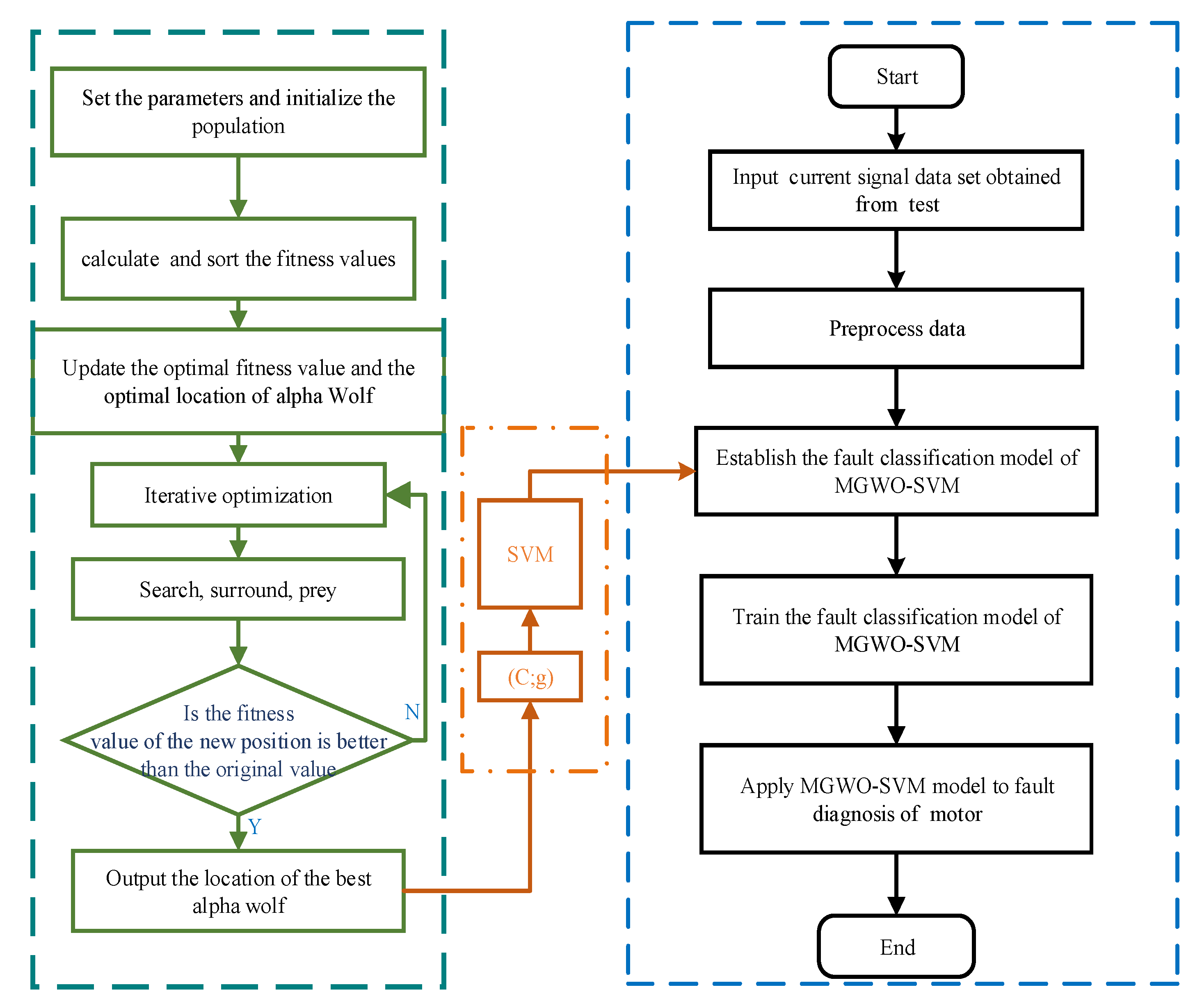
4.2. Model of MGWO-SVM
- Step1:
- Test the “normal” and the other 6 fault states of motor bearing respectively, extract the current signal data of 7 states, and build the current signal data set of the input model accordingly.
- Step2:
- Process the current signal data set of the input model.
- Step3:
- Randomly confuse the data by groups, divide the training data set and the test data set, in order to prepare for better training and testing of SVM model.
- Step4:
- Set the gray wolf population size and iteration times, initialize the gray wolf population, and set the punishment factor C and radial basis kernel function g in SVM as the individual positions of gray Wolf, .
- Step5:
- Take the SVM classification accuracy as the fitness value of the algorithm, calculate the fitness value, and sort the population individual according to the fitness value.
- Step6:
- As the number of iterations of the MGWO is superposition, determine whether the optimal fitness value is reached and determine whether the maximum number of iterations is reached. If not, return step 5.
- Step7:
- The optimal penalty factor C and the radial basis function parameter g obtained from the optimization of the MGWO algorithm were inserted into the SVM model, based on which the fault diagnosis model of the MGWO-SVM was constructed.
- Step8:
- The training data set trained the MGWO-SVM model, and after the training, the model tests the remaining data set.
- Step9:
- Analyze the fault diagnosis results of MGWO-SVM model for motor.
5. Case Studies
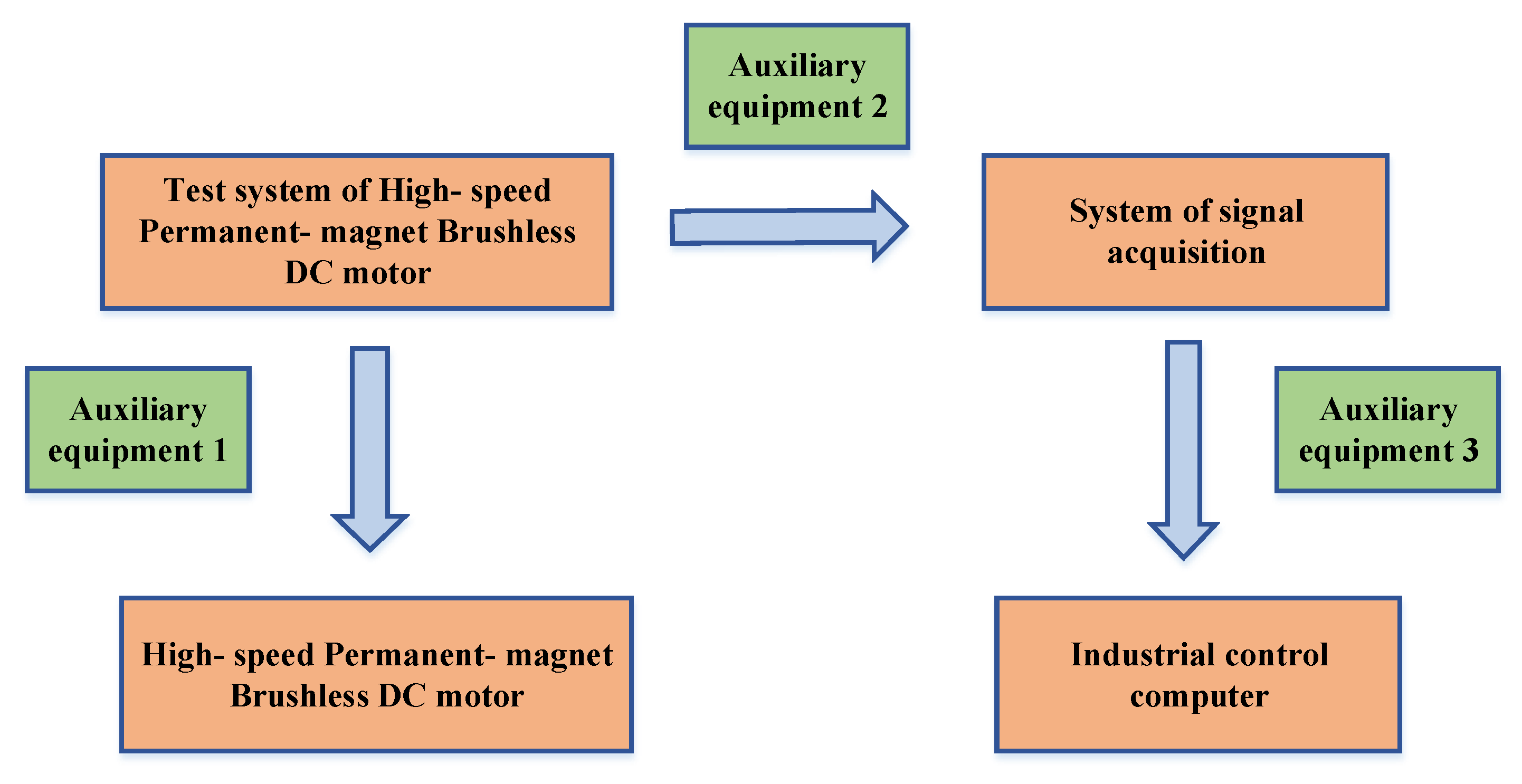
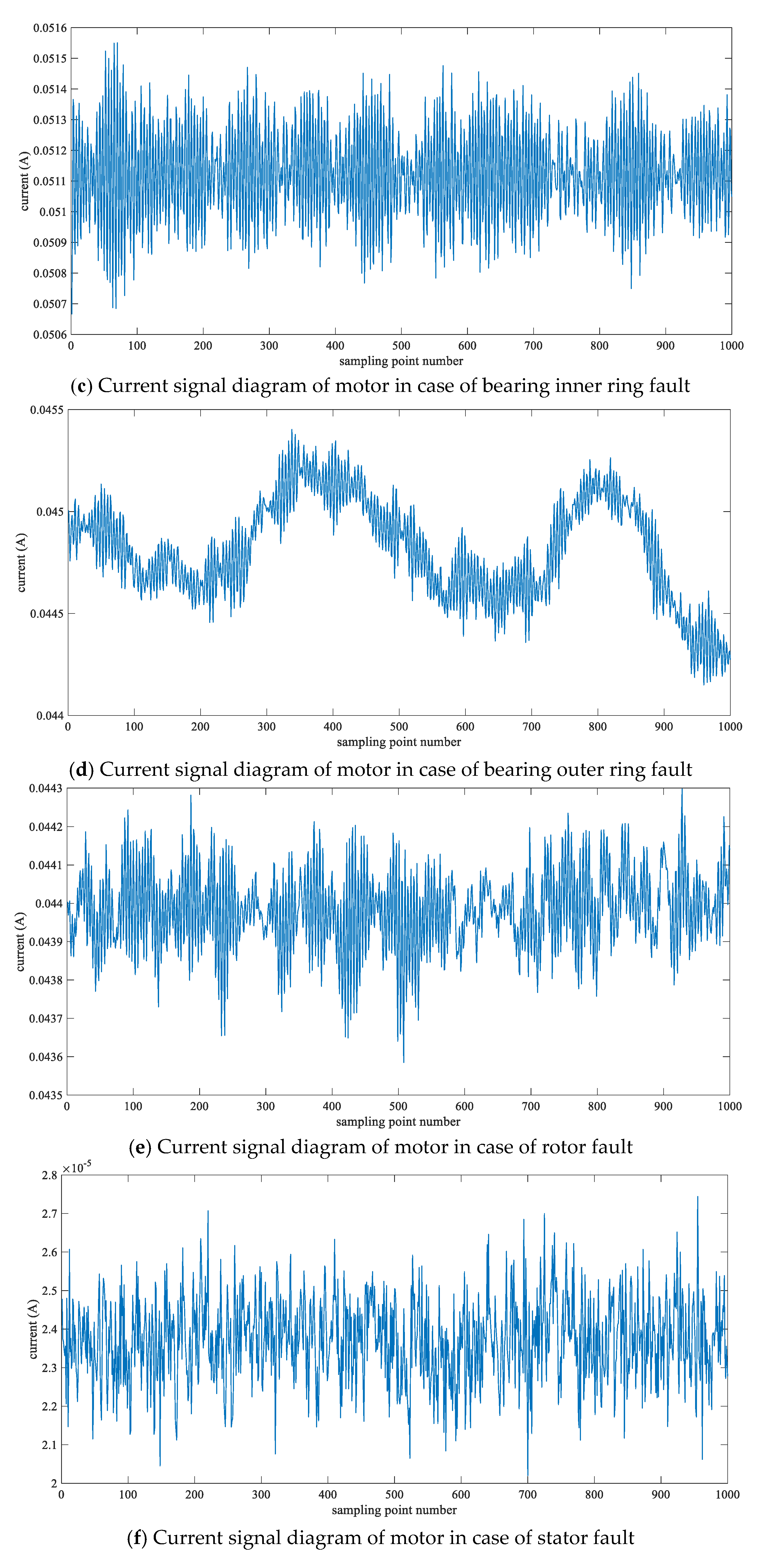
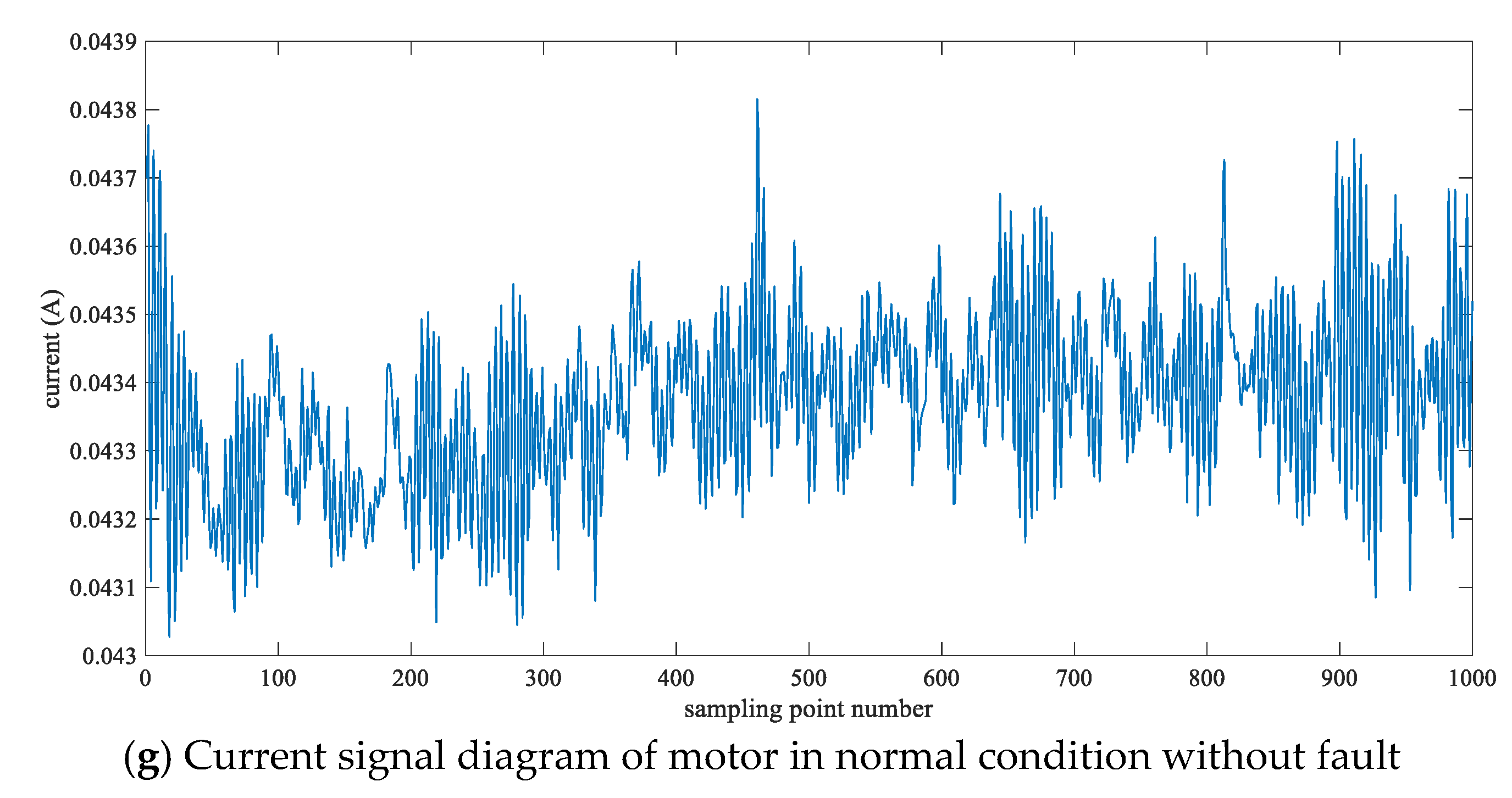
5.1. Experimental Data Extraction
- Step1:
- Select 2 qualified motors, 4 qualified motor bearings and fault parts required for testing different states, and clean them with filtered gasoline for standby;
- Step2:
- Test the qualified motor, and extract the current signal;
- Step3:
- Install qualified fault-free bearing on the motor with stator fault for test, and collect stator fault current signal;
- Step4:
- Install qualified fault-free bearing on the motor with rotor fault for test, and collect rotor fault current signal;
- Step5:
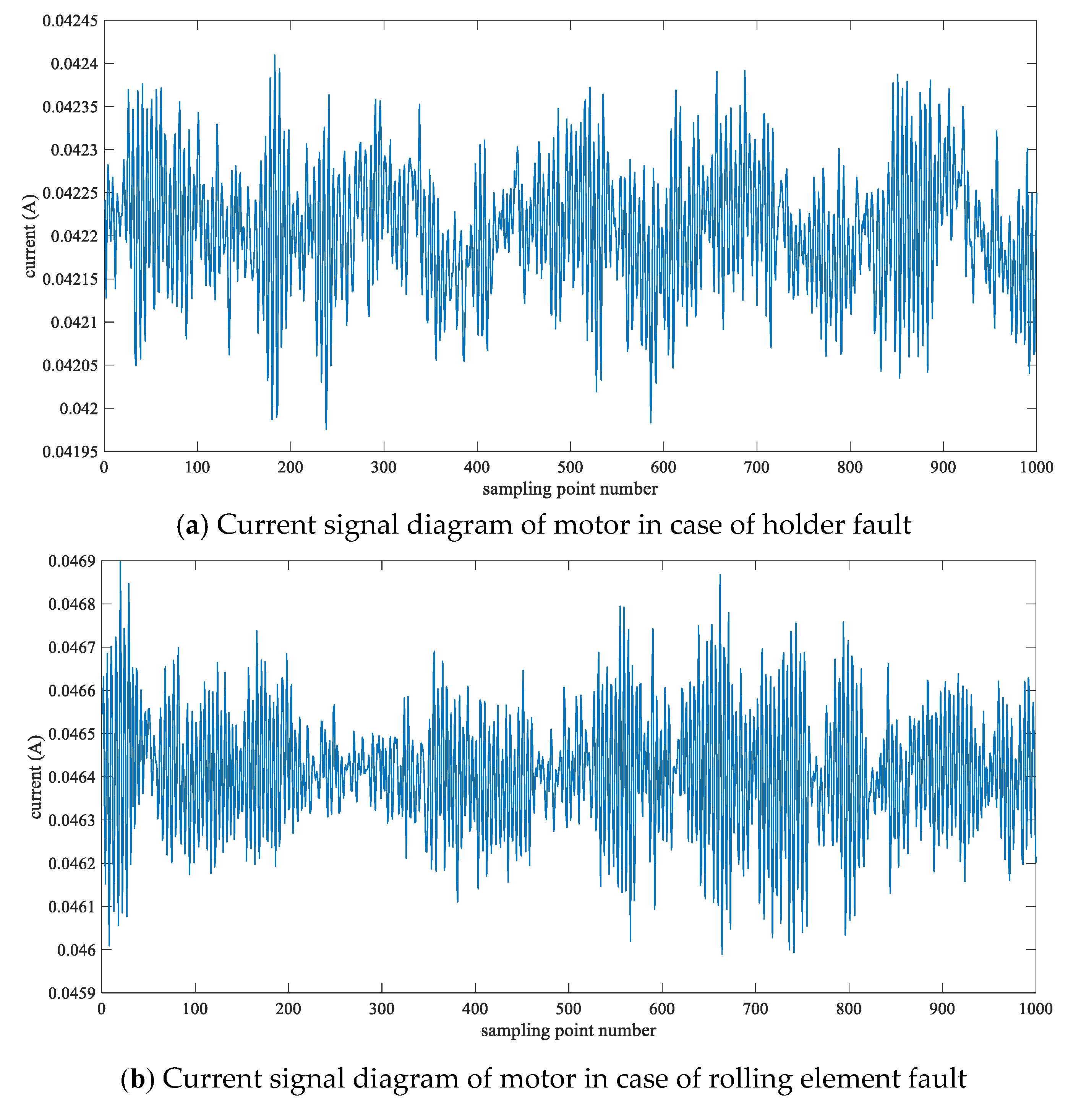
- Replace the qualified bearing with a bearing with only holder fault on the qualified motor, and extract the current signal;
- Step6:
- Replace the qualified bearing with a bearing with only rolling element fault on the qualified motor, and extract the current signal;
- Step7:
- Replace the qualified bearing with a bearing with only bearing inner ring fault on the qualified motor, and extract the current signal;
- Step8:
- Replace the qualified bearing with a bearing with only bearing outer ring fault on the qualified motor, and extract the current signal;
- Step9:
- Sort out the extracted current signal, complete the current signal acquisition and test under different states of the motor.
5.2. Data Processing
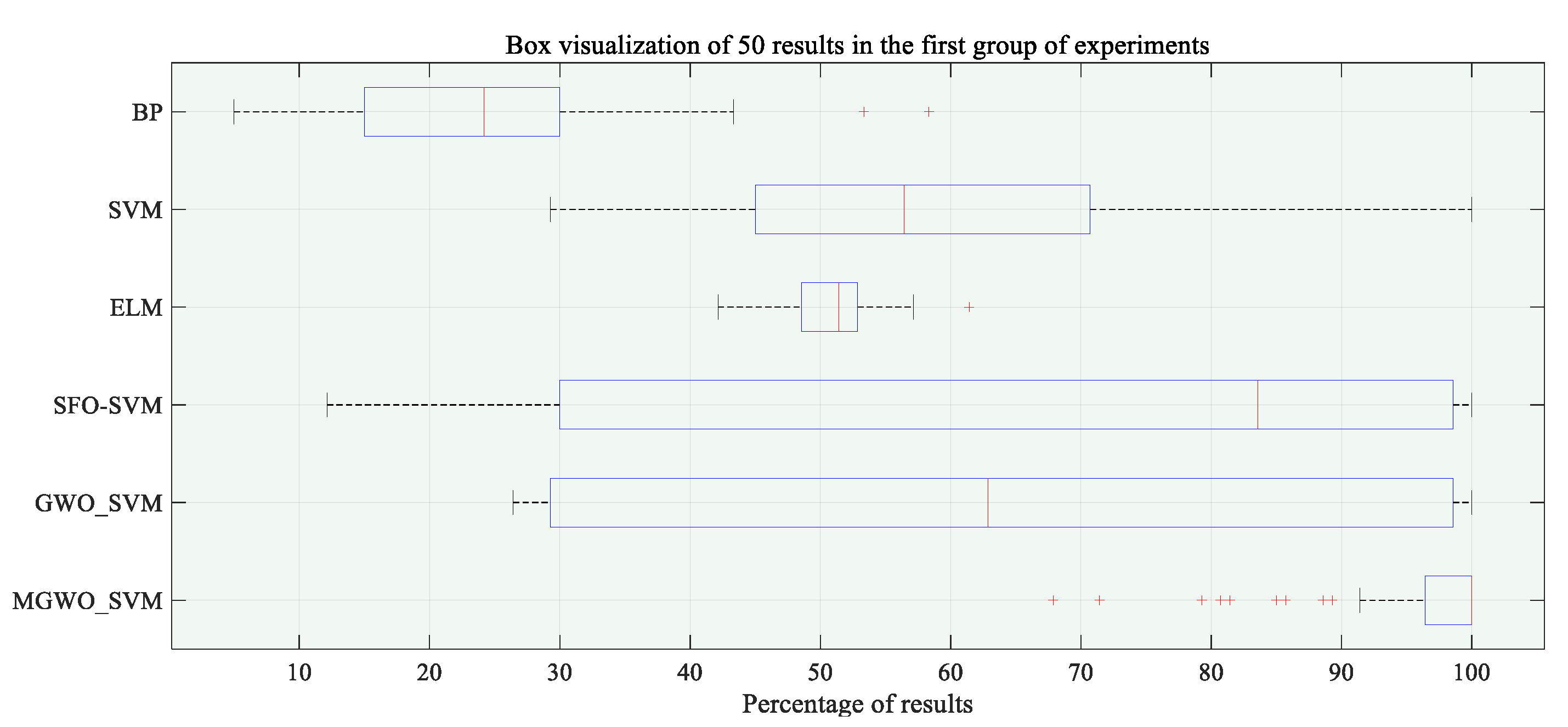
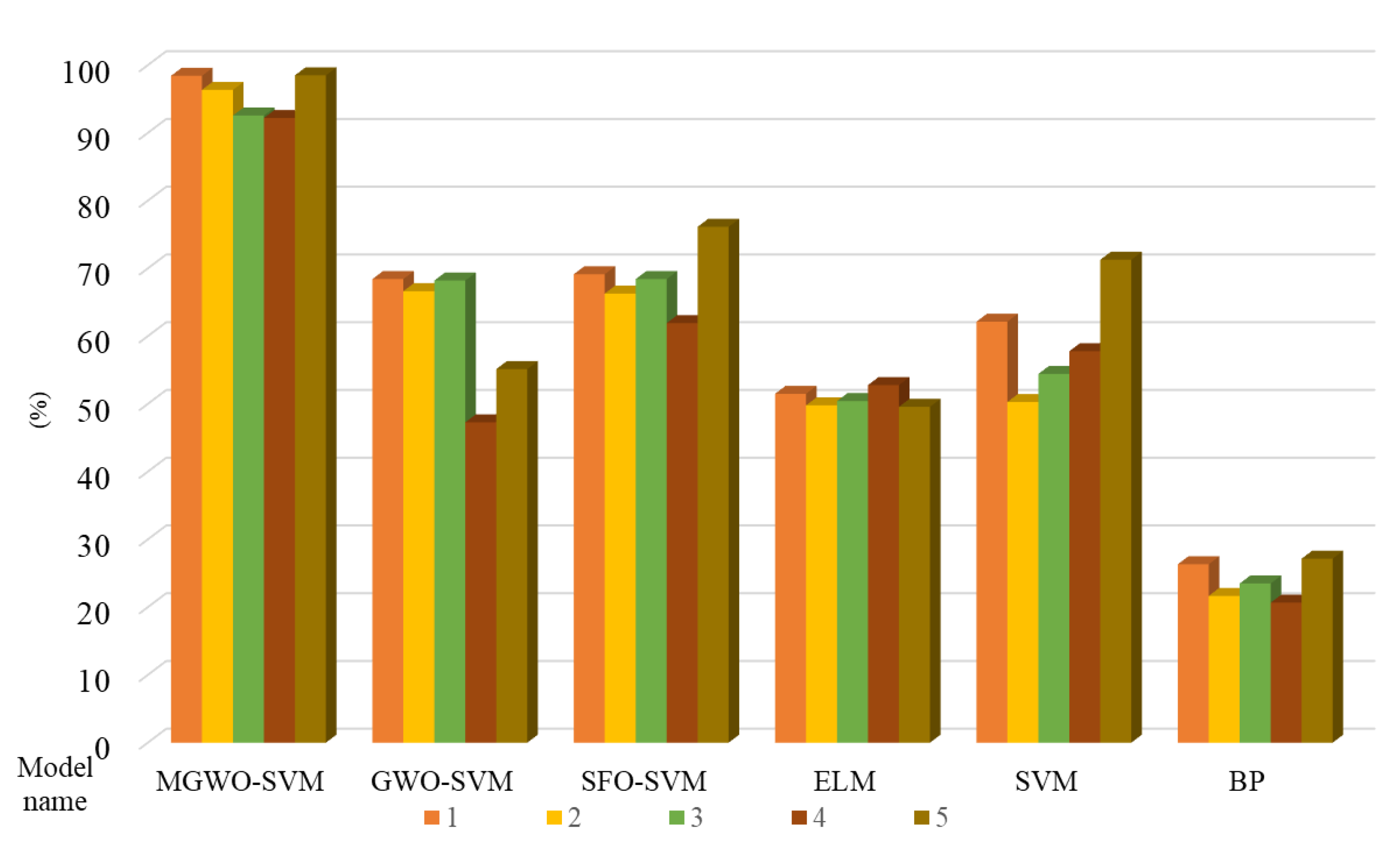
5.3. Experimental Analysis
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Dong, L.; Li, W.-M.; Wang, C.-H.; Lin, K.-P. Gyro motor fault classification model based on a coupled hidden Markov model with a minimum intra-class distance algorithm. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2020, 234, 646–661. [Google Scholar] [CrossRef]
- Zhao, R.J.; Xie, X.L.; Yu, W.Z. Repair equipment allocation problem for a support-and-repair ship on a deep sea: A hybrid multi-criteria decision making and optimization approach. Expert Syst. Appl. 2020, 160, 113658. [Google Scholar] [CrossRef]
- Zhou, A.M.; Yu, D.J.; Zhang, W.Y. A research on intelligent fault diagnosis of wind turbines based on ontology and FMECA. Adv. Eng. Inform. 2015, 29, 115–125. [Google Scholar] [CrossRef]
- Lu, C.; Wang, Z.-Y.; Qin, W.-L.; Ma, J. Fault diagnosis of rotary machinery components using a stacked denoising autoencoder-based health state identification. Signal Process. 2017, 130, 377–388. [Google Scholar] [CrossRef]
- Liu, H.; Zhou, J.; Zheng, Y.; Jiang, W.; Zhang, Y. Fault diagnosis of rolling bearings with recurrent neural network-based autoencoders. ISA Trans. 2018, 77, 167–178. [Google Scholar] [CrossRef] [PubMed]
- Zhu, Z.; Peng, G.; Chen, Y.; Peng, G. A convolutional neural network based on a capsule network with strong generalization for bearing fault diagnosis. Neurocomputing 2019, 323, 62–75. [Google Scholar] [CrossRef]
- Gangsar, P.; Tiwari, R. A support vector machine based fault diagnostics of Induction motors for practical situation of multi-sensor limited data case. Measurement 2019, 135, 694–711. [Google Scholar] [CrossRef]
- Saucedo-Dorantes, J.J.; Prieto, M.D.; Ortega, J.A.; Osornio-Rios, R.A.; Romero-Troncoso, R.D.J. Multiple-Fault Detection Methodology Based on Vibration and Current Analysis Applied to Bearings in Induction Motors and Gearboxes on the Kinematic Chain. Shock. Vib. 2016, 2016, 5467643. [Google Scholar] [CrossRef]
- Chen, H.; Sun, H.; Junejo, N.U.R.; Yang, G.; Qi, J. Whale Vocalization Classification Using Feature Extraction With Resonance Sparse Signal Decomposition and Ridge Extraction. IEEE Access 2019, 7, 136358–136368. [Google Scholar] [CrossRef]
- Zhou, Y.; Lin, L.; Wang, D.; He, M.; He, D. A new method to classify railway vehicle axle fatigue crack AE signal. Appl. Acoust. 2018, 131, 174–185. [Google Scholar] [CrossRef]
- Stetco, A.; Dinmohammadi, F.; Zhao, X.; Robu, V.; Flynn, D.; Barnes, M.; Keane, J.; Nenadic, G. Machine learning methods for wind turbine condition monitoring: A review. Renew. Energy 2019, 133, 620–635. [Google Scholar] [CrossRef]
- Ali, M.Z.; Shabbir, N.S.K.; Liang, X.; Zhang, Y.; Hu, T. Machine Learning-Based Fault Diagnosis for Single- and Multi-Faults in Induction Motors Using Measured Stator Currents and Vibration Signals. IEEE Trans. Ind. Appl. 2019, 55, 2378–2391. [Google Scholar] [CrossRef]
- Zhang, J.; Zhang, J.; Zhong, M.; Zheng, J.; Yao, L. A GOA-MSVM based strategy to achieve high fault identification accuracy for rotating machinery under different load conditions. Measurement 2020, 163, 108067. [Google Scholar] [CrossRef]
- Zhao, H.; Gao, Y.; Liu, H.; Li, L. Fault diagnosis of wind turbine bearing based on stochastic subspace identification and multi-kernel support vector machine. J. Mod. Power Syst. Clean Energy 2019, 7, 350–356. [Google Scholar] [CrossRef]
- Keskes, H.; Braham, A. Recursive Undecimated Wavelet Packet Transform and DAG SVM for Induction Motor Diagnosis. IEEE Trans. Ind. Inform. 2015, 11, 1059–1066. [Google Scholar] [CrossRef]
- Qiu, G.; Huang, S.; Gu, Y. Experimental investigation and multi-conditions identification method of centrifugal pump using Fisher discriminant ratio and support vector machine. Adv. Mech. Eng. 2019, 11, 1687814019878041. [Google Scholar] [CrossRef]
- Zeng, B.; Guo, J.; Zhu, W.; Xiao, Z.; Yuan, F.; Huang, S. A Transformer Fault Diagnosis Model Based On Hybrid Grey Wolf Optimizer and LS-SVM. Energies 2019, 12, 4170. [Google Scholar] [CrossRef]
- Huang, X.; Huang, X.; Wang, B.; Xie, Z. Fault diagnosis of transformer based on modified grey wolf optimization algorithm and support vector machine. IEEJ Trans. Electr. Electron. Eng. 2020, 15, 409–417. [Google Scholar] [CrossRef]
- Yu, J.; Zhang, C.; Wang, S. Multichannel one-dimensional convolutional neural network-based feature learning for fault diagnosis of industrial processes. Neural Comput. Appl. 2020. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, T.; Zhang, X.; Zhang, C. Artificial intelligence-based fault detection and diagnosis methods for building energy systems: Advantages, challenges and the future. Renew. Sustain. Energy Rev. 2019, 109, 85–101. [Google Scholar] [CrossRef]
- Shao, S.; Wheeler, P.W.; Clare, J.C.; Watson, A.J. Fault Detection for Modular Multilevel Converters Based on Sliding Mode Observer. IEEE Trans. Power Electron. 2013, 28, 4867–4872. [Google Scholar] [CrossRef]
- Wan, X.-J.; Liu, L.; Xu, Z.; Xu, Z.; Li, Q.; Xu, F. Fault diagnosis of rolling bearing based on optimized soft competitive learning Fuzzy ART and similarity evaluation technique. Adv. Eng. Inform. 2018, 38, 91–100. [Google Scholar] [CrossRef]
- Bellini, A.; Filippetti, F.; Tassoni, C.; Capolino, G.-A. Advances in Diagnostic Techniques for Induction Machines. IEEE Trans. Ind. Electron. 2008, 55, 4109–4126. [Google Scholar] [CrossRef]
- Wu, X.; Tian, R.; Cheng, S.; Chen, T.; Tong, L. A Nonintrusive Diagnostic Method for Open-Circuit Faults of Locomotive Inverters Based on Output Current Trajectory. IEEE Trans. Power Electron. 2017, 33, 4328–4341. [Google Scholar] [CrossRef]
- Ben Youssef, A.; El Khil, S.K.; Slama-Belkhodja, I. State Observer-Based Sensor Fault Detection and Isolation, and Fault Tolerant Control of a Single-Phase PWM Rectifier for Electric Railway Traction. IEEE Trans. Power Electron. 2013, 28, 5842–5853. [Google Scholar] [CrossRef]
- Huang, Z.J.; Wang, Z.S.A. Multiswitch Open-Circuit Fault Diagnosis of Microgrid Inverter Based on Slidable Triangu-larization Processing. IEEE Trans. Power Electron. 2021, 36, 922–930. [Google Scholar] [CrossRef]
- Kumar, A.; Shankar, R.; Thakur, L.S. A big data driven sustainable manufacturing framework for condition-based maintenance prediction. J. Comput. Sci. 2018, 27, 428–439. [Google Scholar] [CrossRef]
- Wu, X.; Ye, Q. Fault diagnosis and prognostic of solid oxide fuel cells. J. Power Sources 2016, 321, 47–56. [Google Scholar] [CrossRef]
- An, H.; Liang, W.; Zhang, Y.; Tan, J. Hidden Markov model based rotate vector reducer fault detection using acoustic emissions. Int. J. Sens. Netw. 2020, 32, 116–125. [Google Scholar] [CrossRef]
- Duan, L.; Hu, J.; Zhao, G.; Chen, K.; Wang, S.X.; He, J. Method of inter-turn fault detection for next-generation smart transformers based on deep learning algorithm. High Volt. 2019, 4, 282–291. [Google Scholar] [CrossRef]
- Chen, X.; Zhang, B.; Gao, D. Bearing fault diagnosis base on multi-scale CNN and LSTM model. J. Intell. Manuf. 2020. [Google Scholar] [CrossRef]
- Cho, K.-H.; Jo, H.-C.; Kim, E.-S.; Park, H.-A.; Park, J.H. Failure Diagnosis Method of Photovoltaic Generator Using Support Vector Machine. J. Electr. Eng. Technol. 2020, 15, 1669–1680. [Google Scholar] [CrossRef]
- Guedes, A.S.; Silva, S.M.; Filho, B.D.J.C.; Conceição, C.A. Evaluation of electrical insulation in three-phase induction motors and classification of failures using neural networks. Electr. Power Syst. Res. 2016, 140, 263–273. [Google Scholar] [CrossRef]
- Zhou, L.; Lin, T.; Zhou, X.; Gao, S.; Wu, Z.; Zhang, C. Detection of Winding Faults Using Image Features and Binary Tree Support Vector Machine for Autotransformer. IEEE Trans. Transp. Electrif. 2020, 6, 625–634. [Google Scholar] [CrossRef]
- Neffati, S.; Ben Abdellafou, K.; Taouali, O.; Bouzrara, K. Enhanced SVM–KPCA Method for Brain MR Image Classification. Comput. J. 2019, 63, 383–394. [Google Scholar] [CrossRef]
- Ge, J.; Niu, T.; Xu, D.; Yin, G.; Wang, Y. A Rolling Bearing Fault Diagnosis Method Based on EEMD-WSST Signal Reconstruction and Multi-Scale En-tropy. Entropy 2020, 22, 290. [Google Scholar] [CrossRef]
- Ren, H.; Liu, W.; Shan, M.; Wang, X. A new wind turbine health condition monitoring method based on VMD-MPE and feature-based transfer learning. Measurement 2019, 148, 106906. [Google Scholar] [CrossRef]
- Bazan, G.H.; Scalassara, P.R.; Endo, W.; Goedtel, A. Information Theoretical Measurements From Induction Motors Under Several Load and Voltage Conditions for Bearing Faults Classification. IEEE Trans. Ind. Inform. 2019, 16, 3640–3650. [Google Scholar] [CrossRef]
- Chen, P.; Zhao, X.; Zhu, Q. A novel classification method based on ICGOA-KELM for fault diagnosis of rolling bearing. Appl. Intell. 2020, 50, 2833–2847. [Google Scholar] [CrossRef]
- Zhang, J.; Sun, H.; Sun, Z.; Dong, Y.; Dong, W. Open-Circuit Fault Diagnosis of Wind Power Converter Using Variational Mode Decomposition, Trend Feature Analysis and Deep Belief Network. Appl. Sci. 2020, 10, 2146. [Google Scholar] [CrossRef]
- Wu, J.; Guo, P.; Cheng, Y.; Zhu, H.; Wang, X.B.; Shao, X. Ensemble generalized multiclass support-vector-machine-based health evaluation of complex degradation systems. IEEE/ASME Trans. Mechatron. 2020, 25, 2230–2240. [Google Scholar] [CrossRef]
- Huachun, W.; Jian, Z.; Chunhu, X.; Jiyang, Z.; Yiming, H. Two-dimensional time series sample entropy algorithm: Applications to rotor axis orbit feature identification. Mech. Syst. Signal Process. 2021, 147, 107123. [Google Scholar] [CrossRef]
- Yuan, X.; Liu, Z.; Miao, Z.; Zhao, Z.; Zhou, F.; Song, Y. Fault Diagnosis of Analog Circuits Based on IH-PSO Optimized Support Vector Machine. IEEE Access 2019, 7, 137945–137958. [Google Scholar] [CrossRef]
- Zhou, Z.; Li, G.; Wang, J.; Chen, H.; Zhong, H.; Cao, Z. A comparison study of basic data-driven fault diagnosis methods for variable refrigerant flow system. Energy Build. 2020, 224, 110232. [Google Scholar] [CrossRef]
- Qin, A.; Hu, Q.; Zhang, Q.; Lv, Y.; Sun, G. Application of sensitive dimensionless parameters and PSO–SVM for fault classification in rotating machinery. Assem. Autom. 2019, 40, 175–187. [Google Scholar] [CrossRef]
- Hu, H.; Tian, S.; Guo, Q.; Ouyang, A. The Application of HIWO–SVM in Analog Circuit Fault Diagnosis. Int. J. Pattern Recognit. Artif. Intell. 2015, 29, 1550019. [Google Scholar] [CrossRef]
- Guo, K.; Cui, L.; Mao, M.; Zhou, L.; Zhang, Q. An Improved Gray Wolf Optimizer MPPT Algorithm for PV System With BFBIC Converter Under Partial Shading. IEEE Access 2020, 8, 103476–103490. [Google Scholar] [CrossRef]
- Gölcük, I.; Ozsoydan, F.B. Evolutionary and adaptive inheritance enhanced Grey Wolf Optimization algorithm for binary domains. Knowledge-Based Syst. 2020, 194, 105586. [Google Scholar] [CrossRef]
- Heidari, A.A.; Pahlavani, P. An efficient modified grey wolf optimizer with Lévy flight for optimization tasks. Appl. Soft Comput. 2017, 60, 115–134. [Google Scholar] [CrossRef]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey wolf optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef]
- Cui, Y. Application of the Improved Chaotic Self-Adapting Monkey Algorithm into Radar Systems of Internet of Things. IEEE Access 2018, 6, 54270–54281. [Google Scholar] [CrossRef]
- Singh, N.J.; Dhillon, J.; Kothari, D. Non-interactive approach to solve multi-objective thermal power dispatch problem using composite search algorithm. Appl. Soft Comput. 2018, 65, 644–658. [Google Scholar] [CrossRef]
- Li, L.-L.; Wen, S.-Y.; Tseng, M.-L.; Wang, C.-S. Renewable energy prediction: A novel short-term prediction model of photovoltaic output power. J. Clean. Prod. 2019, 228, 359–375. [Google Scholar] [CrossRef]
- Li, Z.; Outbib, R.; Giurgea, S.; Hissel, D.; Jemei, S.; Giraud, A.; Rosini, S. Online implementation of SVM based fault diagnosis strategy for PEMFC systems. Appl. Energy 2016, 164, 284–293. [Google Scholar] [CrossRef]
- Glowacz, A.; Glowacz, W.; Glowacz, Z. Recognition of armature current of DC generator depending on rotor speed using FFT, MSAF-1 and LDA. Ekspolatacja Niezawodn. Maint. Reliab. 2015, 17, 64–69. [Google Scholar] [CrossRef]
- Glowacz, A.; Kozik, J.; Gutten, M.; Korenciak, D.; Khan, Z.F.; Irfan, M.; Carletti, E. Fault Diagnosis of Three Phase Induction Motor Using Current Signal, MSAF-Ratio15 and Selected Classifiers. Arch. Met. Mater. 2017, 62, 2413–2419. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Function | Lower | Upper | Global Minimum | Function Type |
|---|---|---|---|---|
| −100 | 100 | 0 | Unimodal | |
| −10 | 10 | 0 | Unimodal | |
| −100 | 100 | 0 | Unimodal | |
| −100 | 100 | 0 | Multimodal | |
| −5.12 | 5.12 | 0 | Multimodal | |
| −32 | 32 | 0 | Multimodal |
| Function | MGWO | GWO | SFO | PSO | ||||
|---|---|---|---|---|---|---|---|---|
| Optimum | Average | Optimum | Average | Optimum | Average | Optimum | Average | |
| F1 | 0 | 0 | 2..00 × 10−29 | 2.19 × 10−27 | 2.58 × 10−12 | 3.63 × 10−10 | 1.48 × 10−5 | 3.44 × 10−4 |
| F2 | 0 | 0 | 2.19 × 10−17 | 9.47 × 10−17 | 4.28 × 10−6 | 8.74 × 10−5 | 1.44 × 10−2 | 4.13 × 10−2 |
| F3 | 0 | 0 | 3.05 × 10−9 | 4.72 × 10−6 | 1.22 × 10−12 | 5.31 × 10−8 | 44.80 | 103 |
| F4 | 1.87 × 10−6 | 1.07 × 10−4 | 3.55 × 10−4 | 2.32 × 10−3 | 8.75 × 10−5 | 7.00 × 10−4 | 3.90 × 10−2 | 9.47 × 10−2 |
| F5 | 0 | 0 | 5.68 × 10−14 | 1.89 × 10−13 | 1.73 × 10−7 | 2.10 × 10−5 | 29.60 | 55.50 |
| F6 | 8.88 × 10−16 | 8.88 × 10−16 | 7.55 × 10−14 | 1.08 × 10−13 | 1.34 × 10−7 | 1.23 × 10−5 | 1.59 × 10−3 | 1.63 × 10−2 |
| SVM Parameters | Maximum Iterations | Population Number | Dimension | Parameter Range of Penalty Factor | Parameter Range of Kernel Function |
| 100 | 50 | 2 | [0.1, 1200] | [0.001, 100] | |
| SFO-SVM | SF percent | Attack coefficient | Attack coefficient | ||
| 0.4 | 4 | 0.0001 | |||
| ELM | Number of neurons in hidden layer | ||||
| 250 | |||||
| BP | Maximum convergence times | Rate of learning | Convergen-ce objective | ||
| 100 | 0.01 | 0 | |||
| Model | Accuracy of Different Optimization Number (%) | Average | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | ||
| MGWO-SVM | 88.57 | 100.0 | 98.57 | 100.0 | 100.0 | 100.0 | 100.0 | 100.0 | 99.29 | 97.86 | 98.430 |
| GWO-SVM | 32.14 | 97.86 | 56.43 | 28.57 | 100.0 | 72.86 | 75.00 | 94.29 | 98.57 | 28.57 | 68.430 |
| SFO-SVM | 90.00 | 97.14 | 29.29 | 98.57 | 26.42 | 84.29 | 52.86 | 83.57 | 34.29 | 95.00 | 69.143 |
| SVM | 72.14 | 43.57 | 70.00 | 57.86 | 54.29 | 100.0 | 57.14 | 69.29 | 41.43 | 55.71 | 62.143 |
| ELM | 54.29 | 50.00 | 47.14 | 53.57 | 51.43 | 52.14 | 52.86 | 51.43 | 50.71 | 45.71 | 50.928 |
| BP | 33.33 | 30.00 | 10.00 | 16.67 | 26.67 | 16.67 | 58.33 | 10.00 | 33.33 | 28.33 | 26.333 |
| Model | Accuracy of Different Optimization Number (%) | Average | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | ||
| MGWO-SVM | 100.0 | 95.00 | 100.0 | 99.29 | 100.0 | 100.0 | 100.0 | 71.43 | 100.0 | 99.29 | 96.500 |
| GWO-SVM | 99.29 | 28.57 | 100.0 | 27.86 | 74.29 | 85.00 | 70.00 | 100.0 | 20.00 | 83.57 | 68.857 |
| SFO-SVM | 100.0 | 27.14 | 26.43 | 100 | 27.14 | 60.00 | 75.71 | 87.14 | 77.86 | 71.43 | 65.285 |
| SVM | 91.43 | 57.86 | 72.14 | 84.29 | 59.29 | 61.43 | 30.71 | 55.71 | 71.43 | 57.14 | 64.143 |
| ELM | 52.14 | 54.29 | 56.43 | 60.00 | 55.71 | 50.00 | 50.71 | 52.86 | 50.00 | 54.29 | 53.643 |
| BP | 20.00 | 15.00 | 33.33 | 33.33 | 3.33 | 13.33 | 28.33 | 31.67 | 38.33 | 10.00 | 22.665 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, L.-L.; Liu, J.-Q.; Zhao, W.-B.; Dong, L. Fault Diagnosis of High-Speed Brushless Permanent-Magnet DC Motor Based on Support Vector Machine Optimized by Modified Grey Wolf Optimization Algorithm. Symmetry 2021, 13, 163. https://doi.org/10.3390/sym13020163
Li L-L, Liu J-Q, Zhao W-B, Dong L. Fault Diagnosis of High-Speed Brushless Permanent-Magnet DC Motor Based on Support Vector Machine Optimized by Modified Grey Wolf Optimization Algorithm. Symmetry. 2021; 13(2):163. https://doi.org/10.3390/sym13020163
Chicago/Turabian StyleLi, Ling-Ling, Jia-Qi Liu, Wei-Bing Zhao, and Lei Dong. 2021. "Fault Diagnosis of High-Speed Brushless Permanent-Magnet DC Motor Based on Support Vector Machine Optimized by Modified Grey Wolf Optimization Algorithm" Symmetry 13, no. 2: 163. https://doi.org/10.3390/sym13020163
APA StyleLi, L.-L., Liu, J.-Q., Zhao, W.-B., & Dong, L. (2021). Fault Diagnosis of High-Speed Brushless Permanent-Magnet DC Motor Based on Support Vector Machine Optimized by Modified Grey Wolf Optimization Algorithm. Symmetry, 13(2), 163. https://doi.org/10.3390/sym13020163