
End Effect Analysis of a Slot-Less Long-Stator Permanent Magnet Linear Synchronous Motor



Abstract
:1. Introduction
2. Magnetic Field Analysis Considering the End Effect
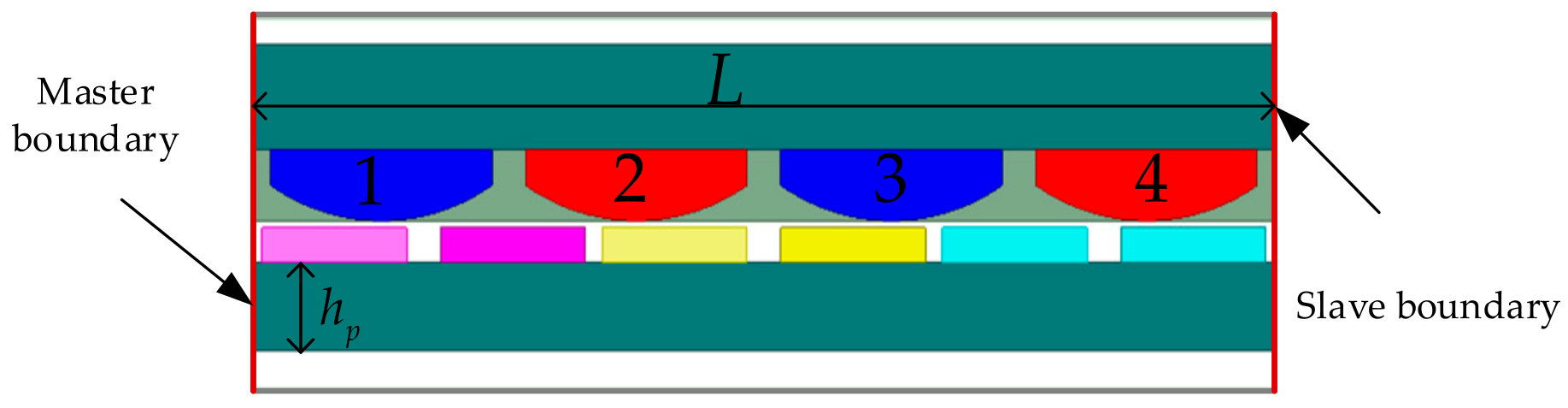
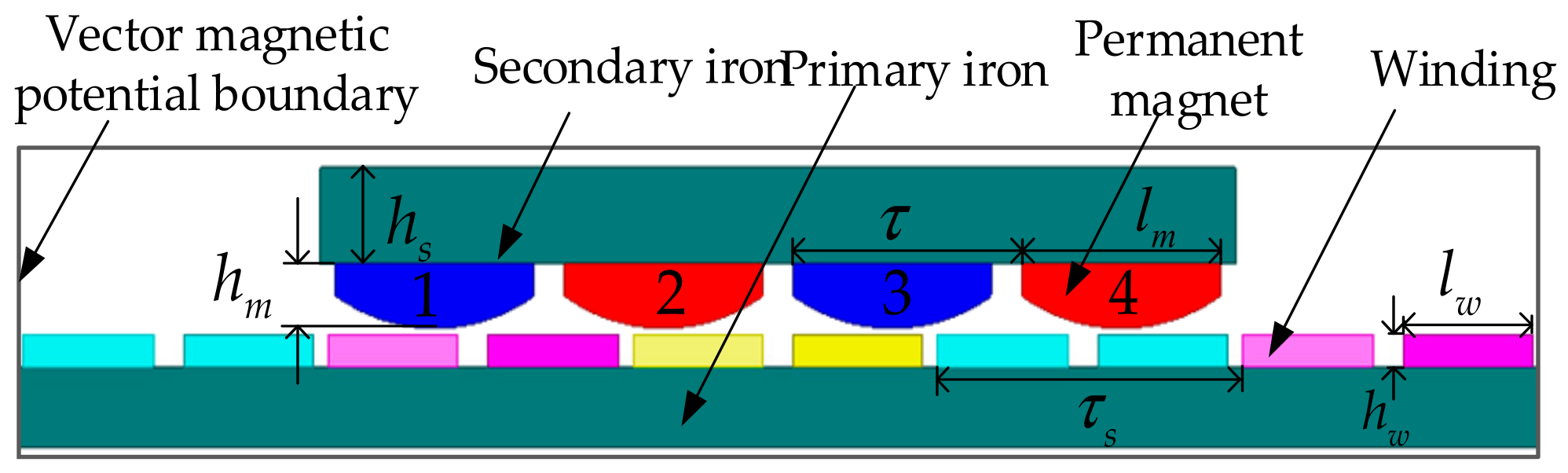
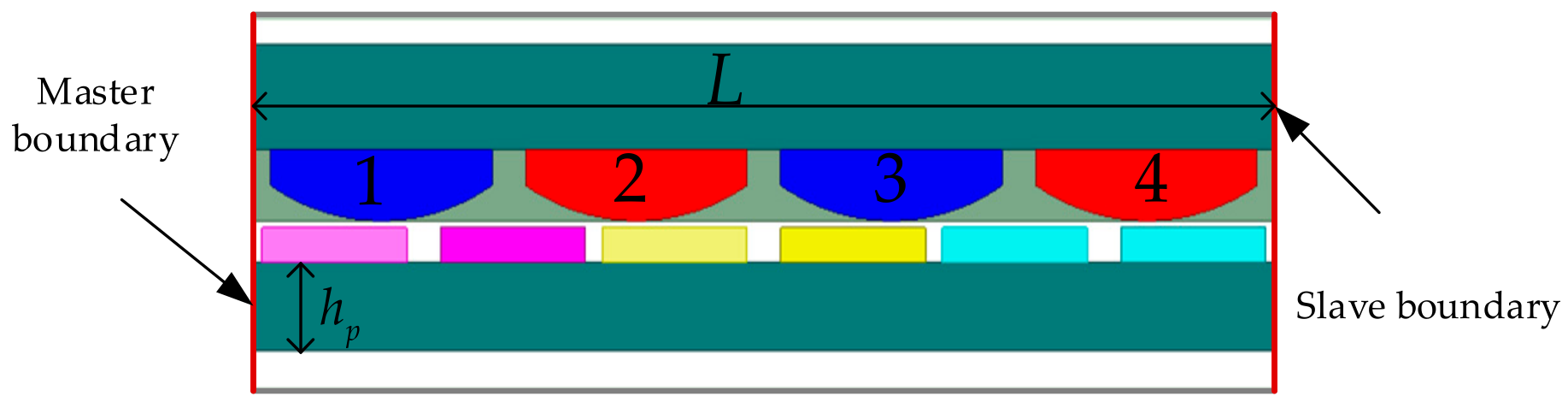
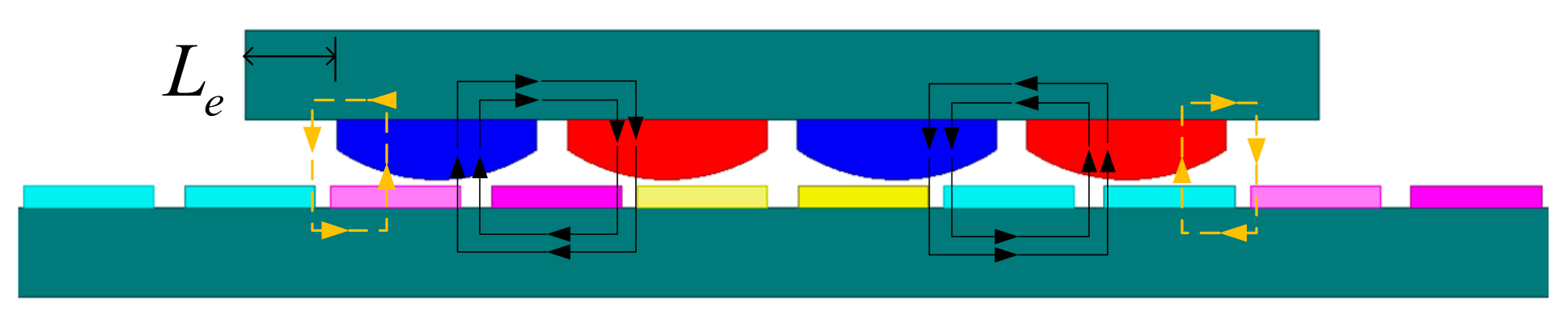
2.1. Structure of the Motor
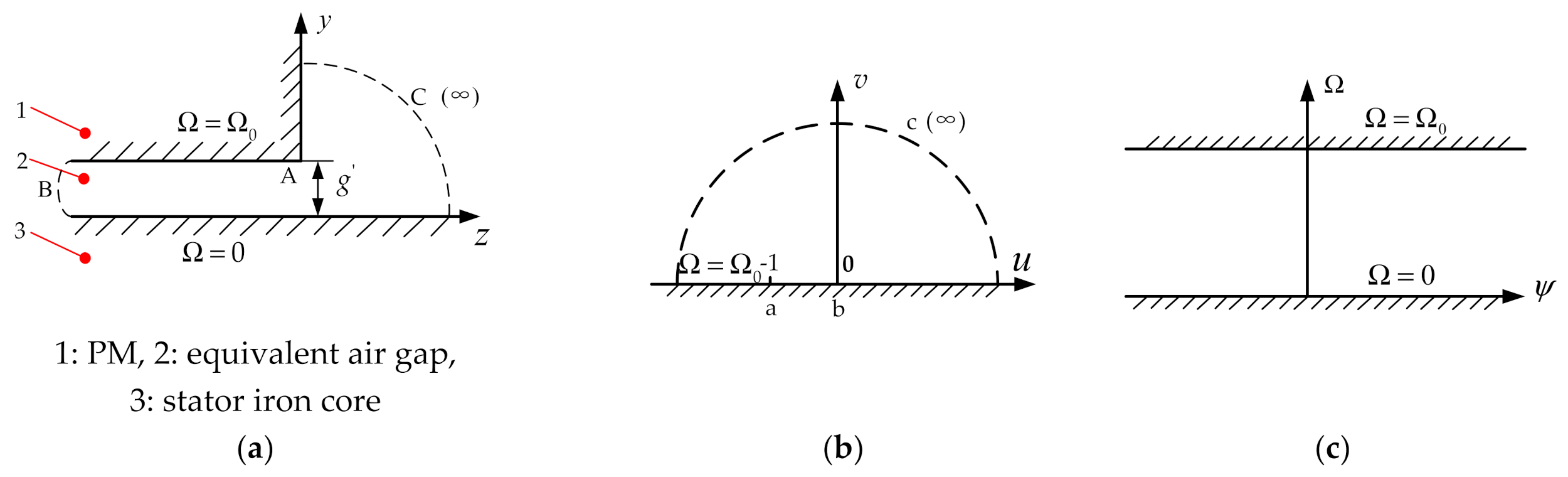
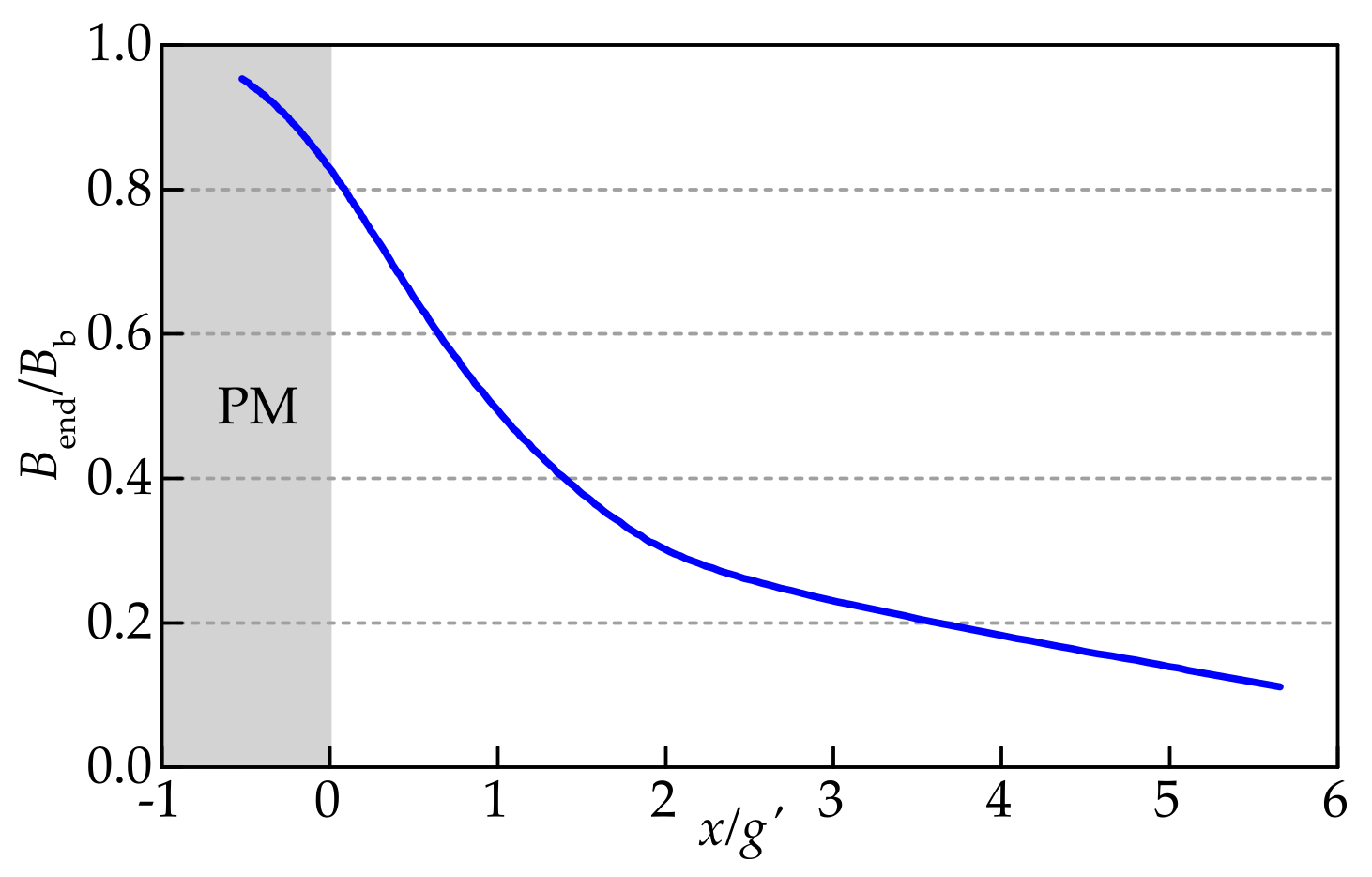
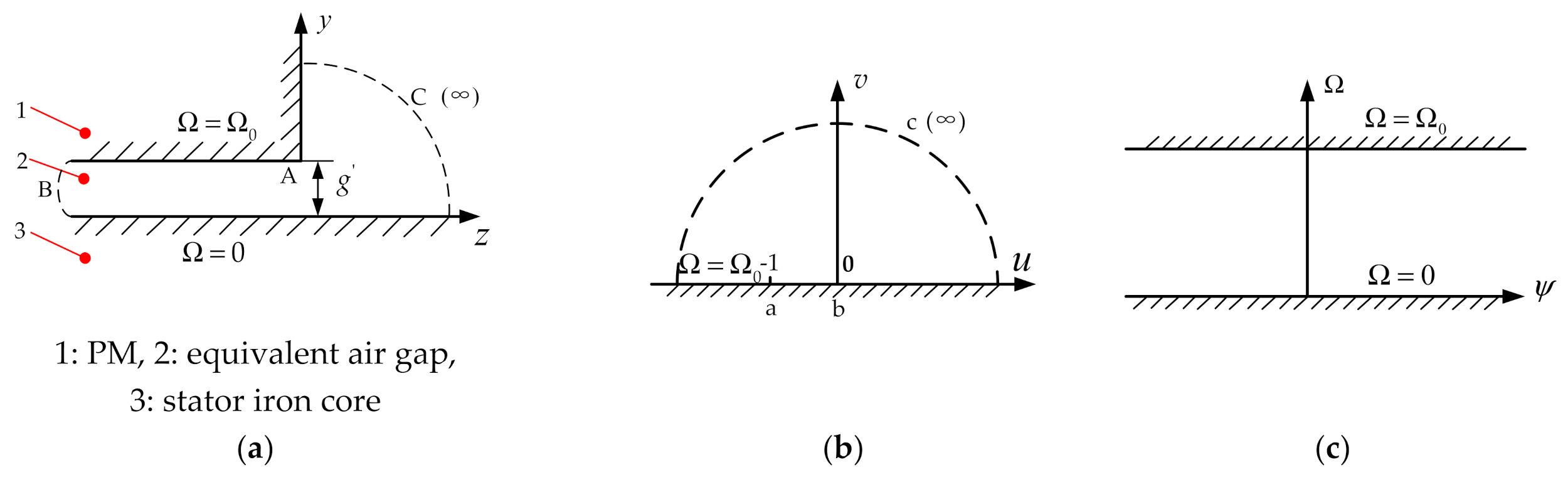
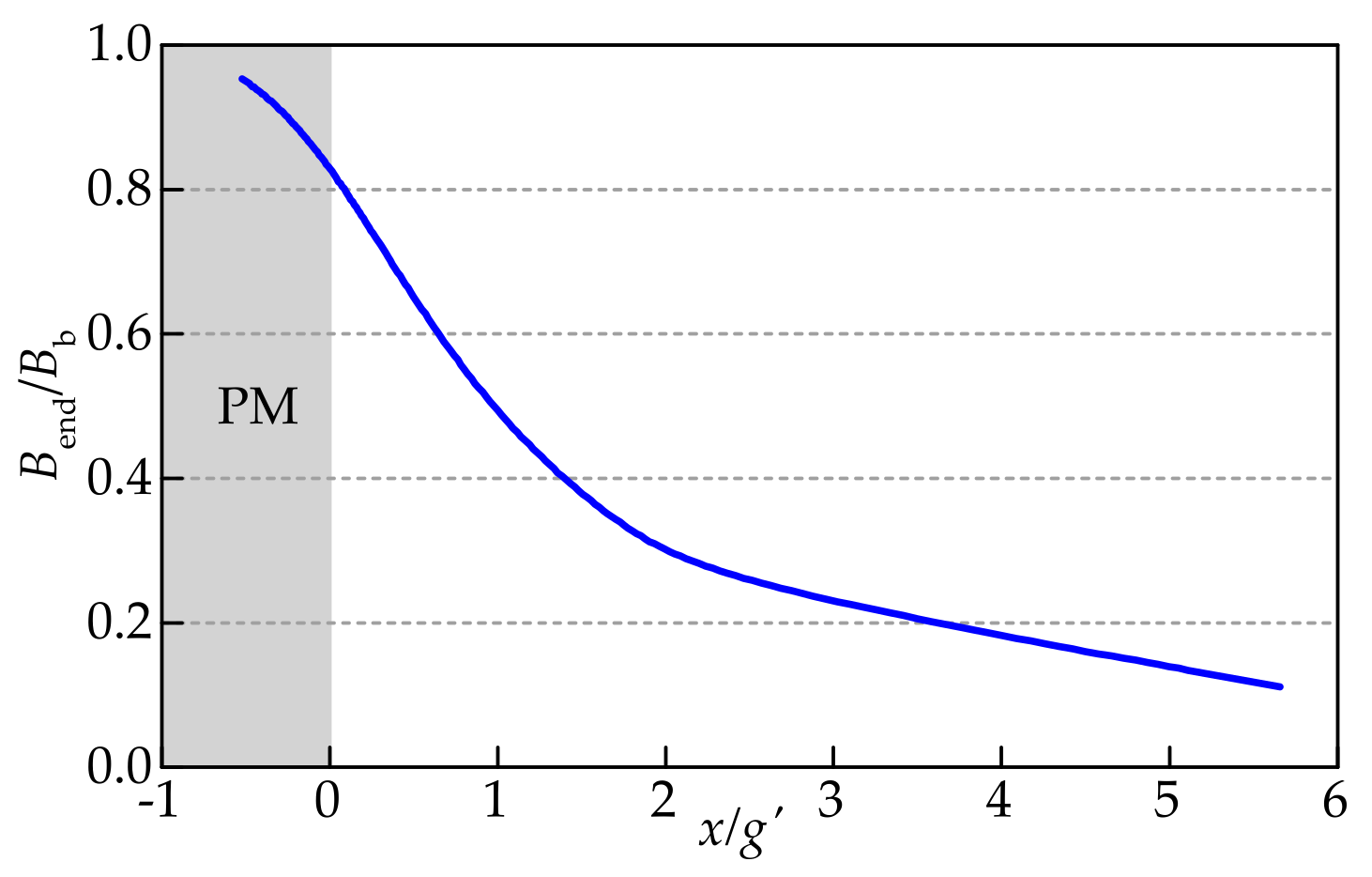
2.2. Model of End Magnetic Field
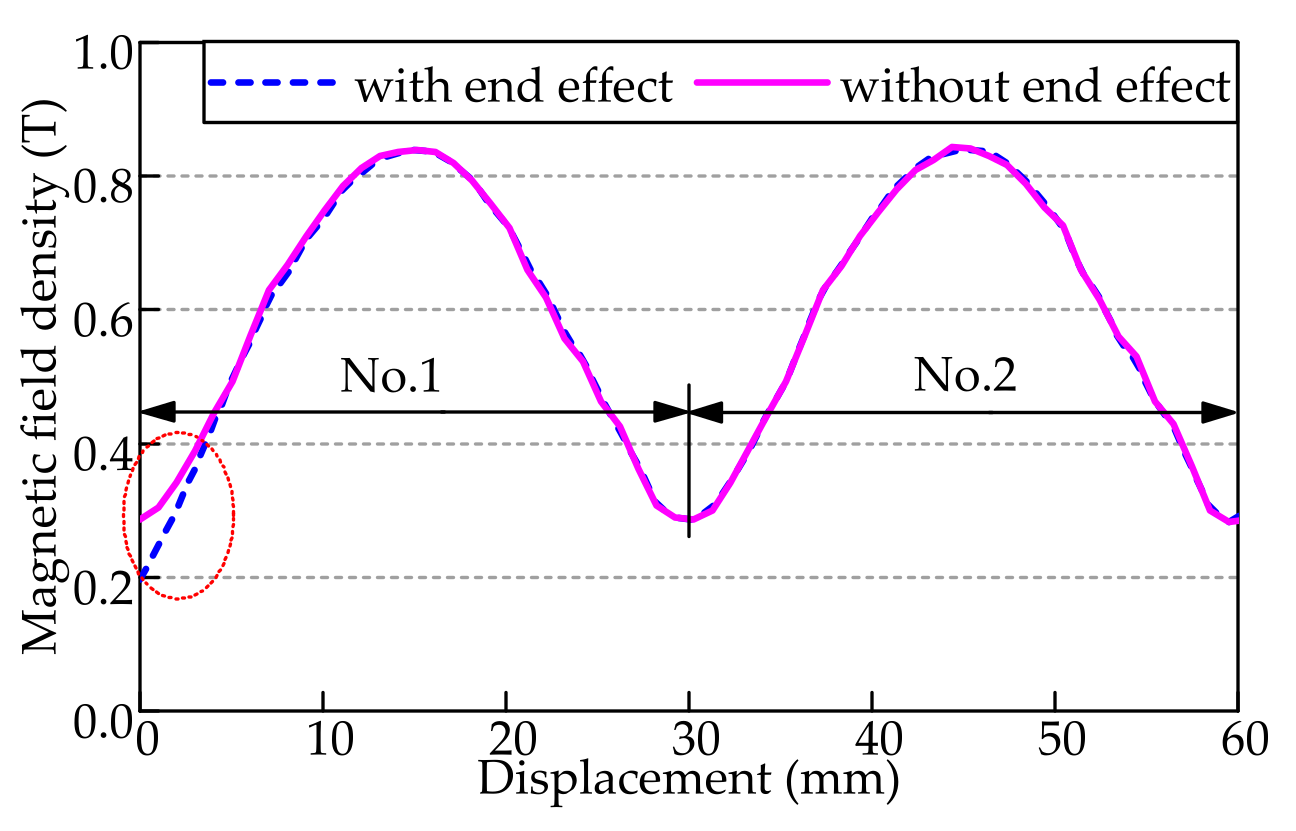
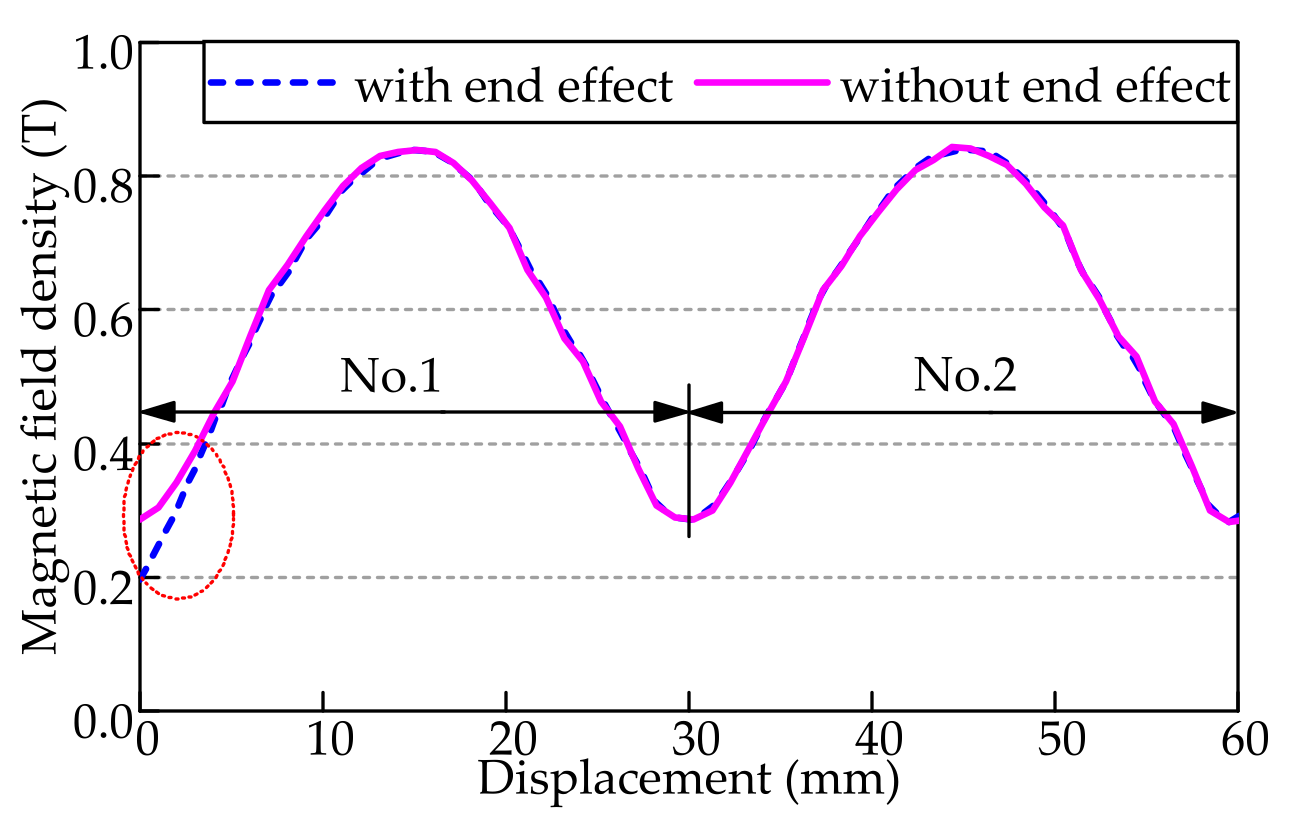
2.3. Simulation Verification
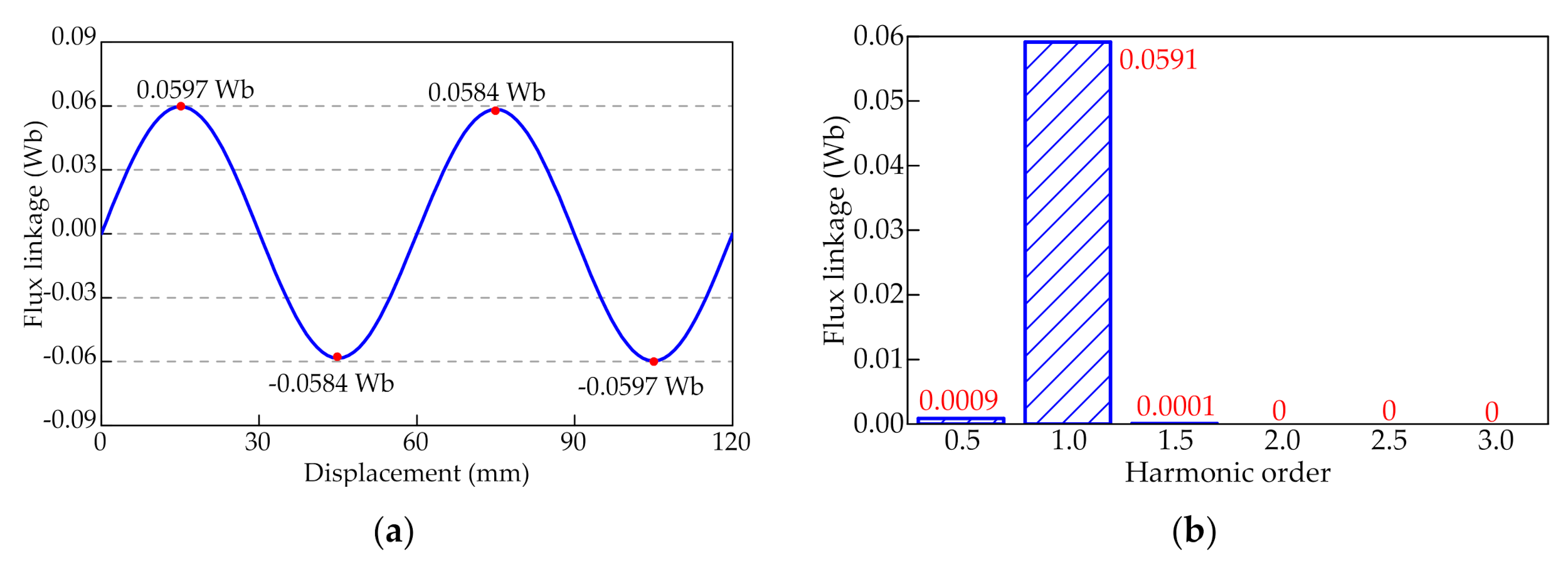
3. Influence of the End Effect on the Flux Linkage
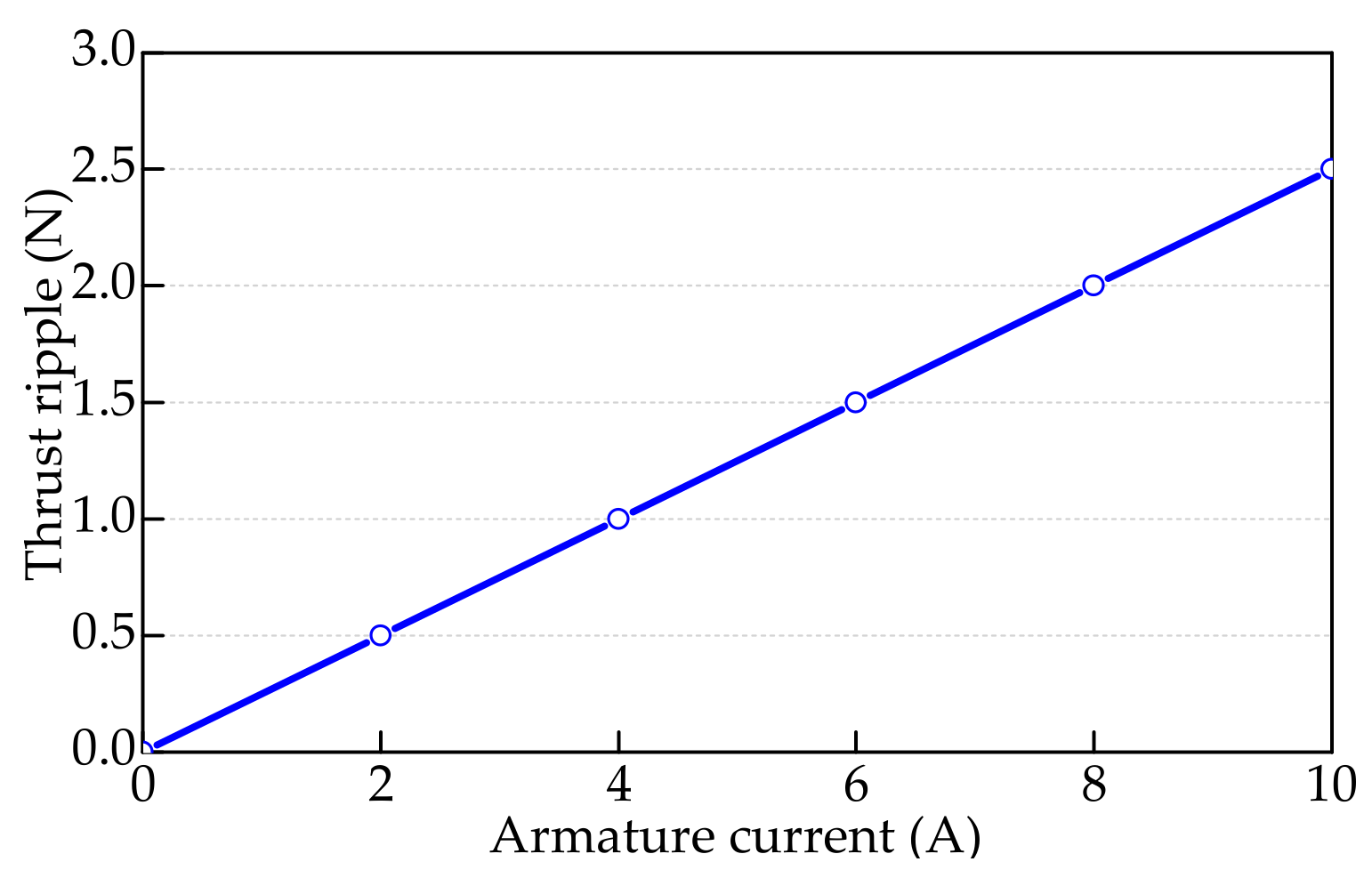
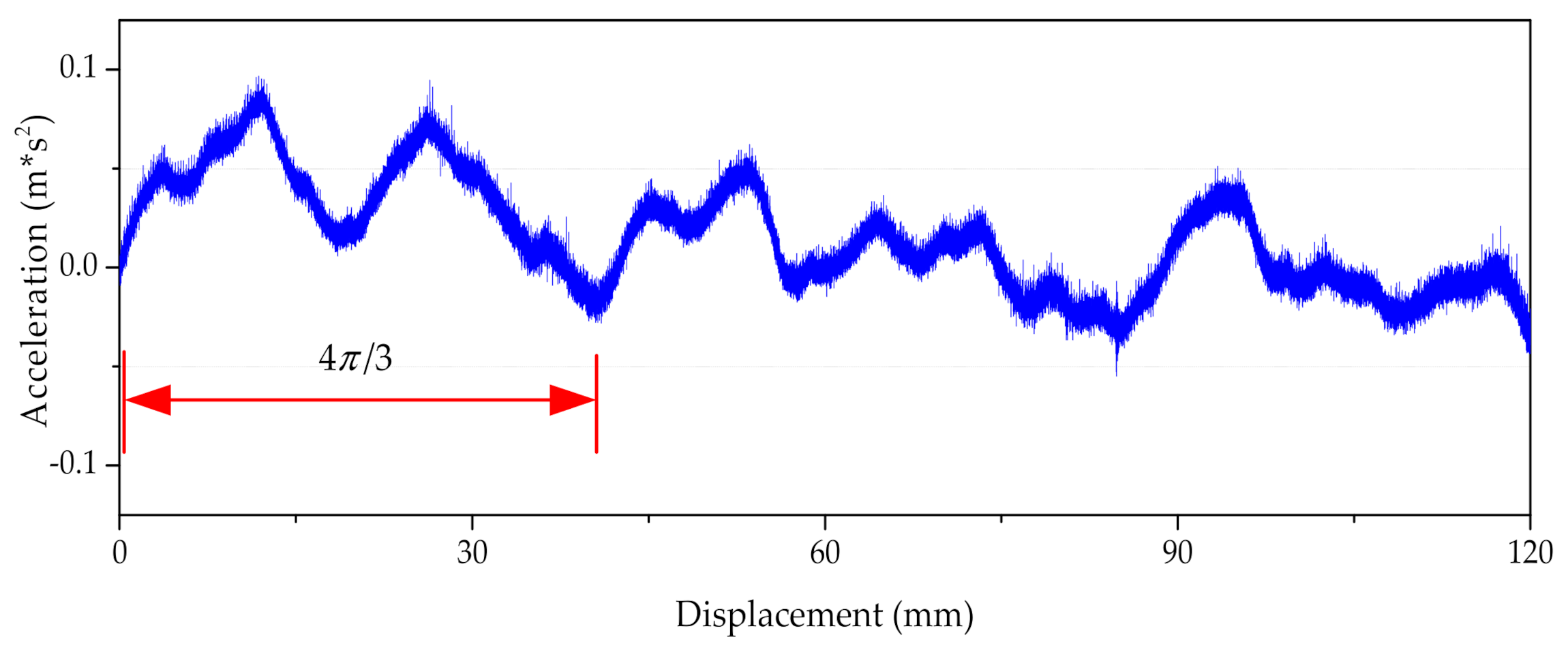
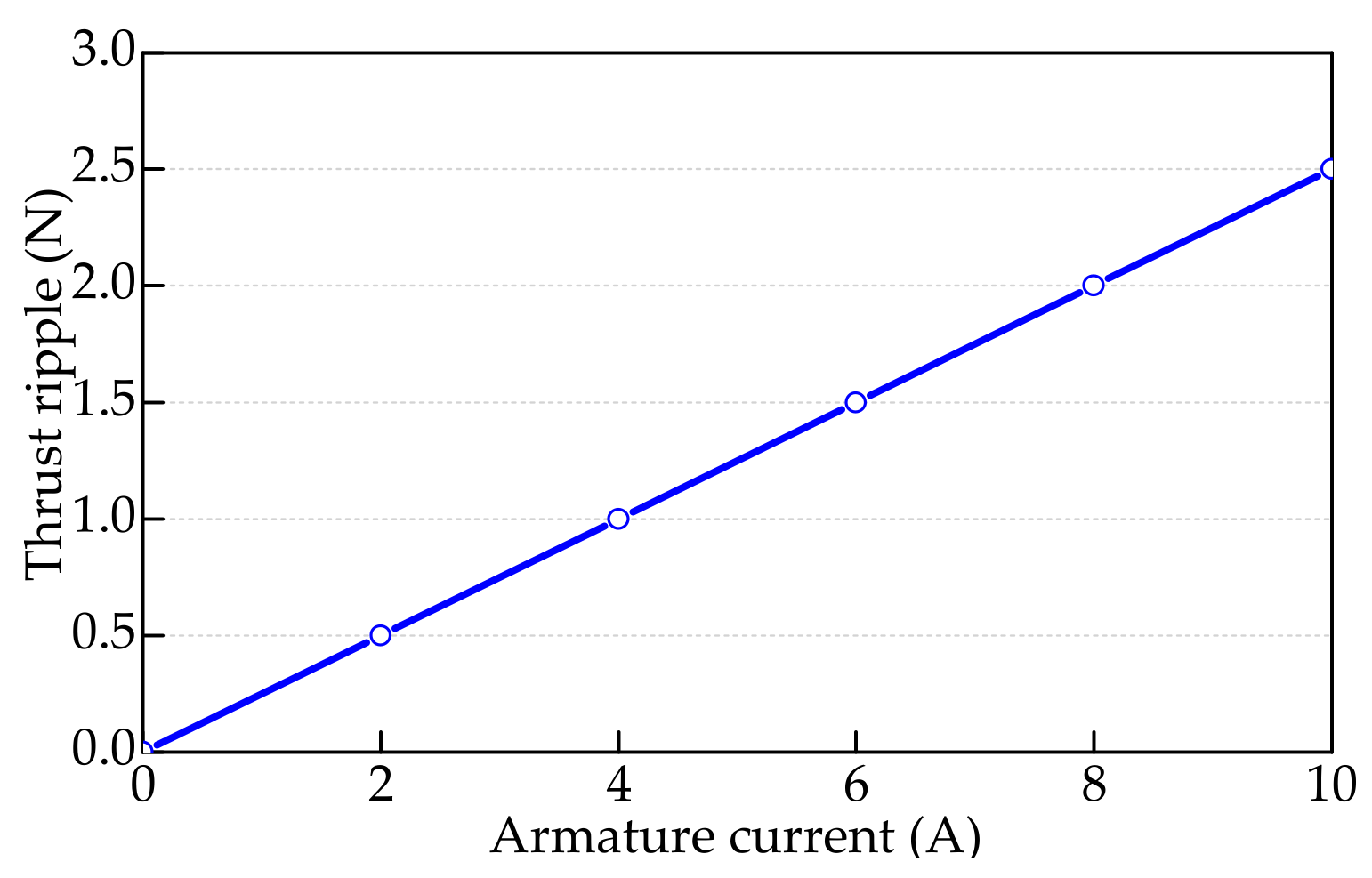
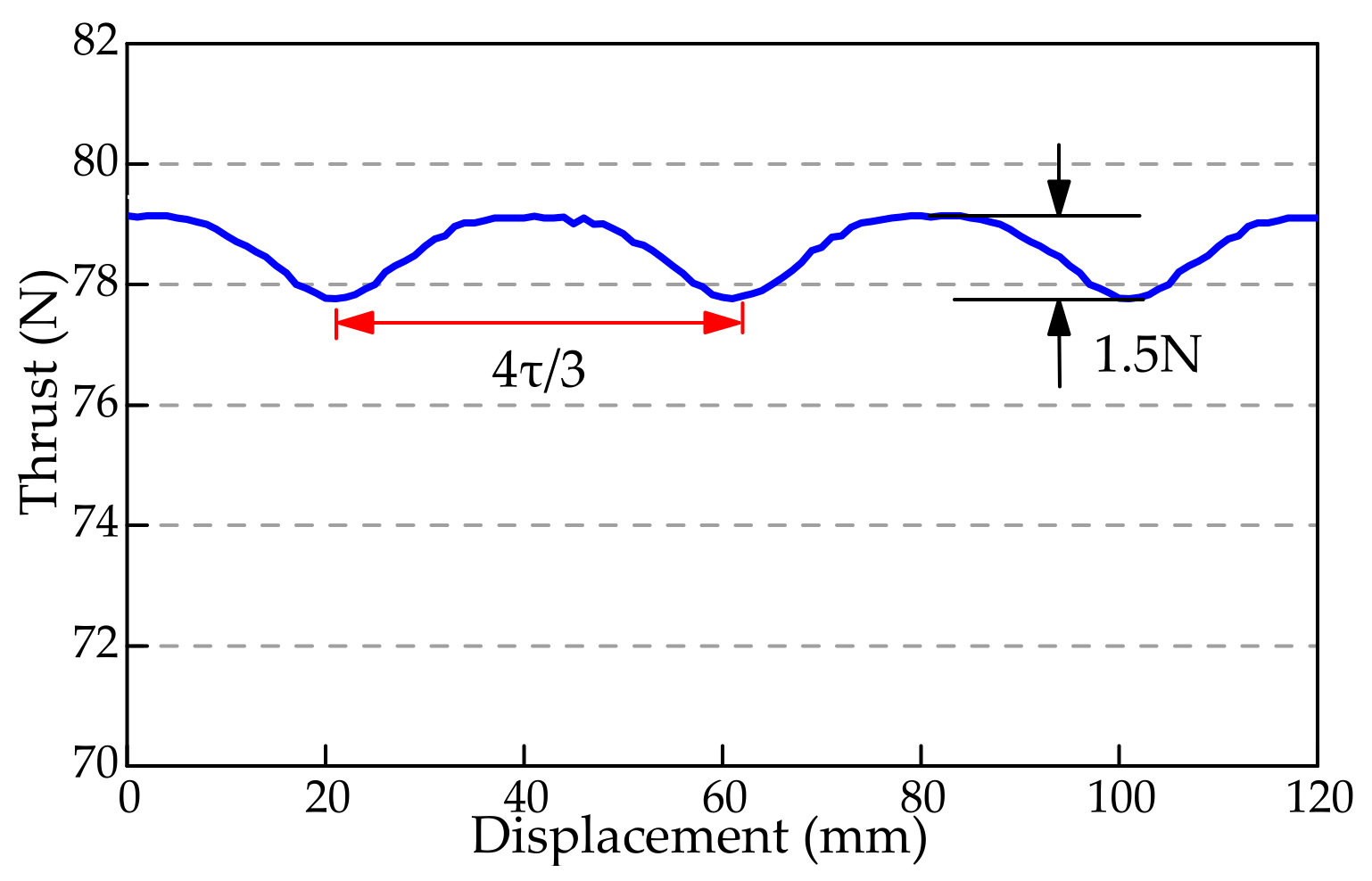
4. Influence of the End Effect on the Thrust Ripple
4.1. Thrust Model Considering the End Effect
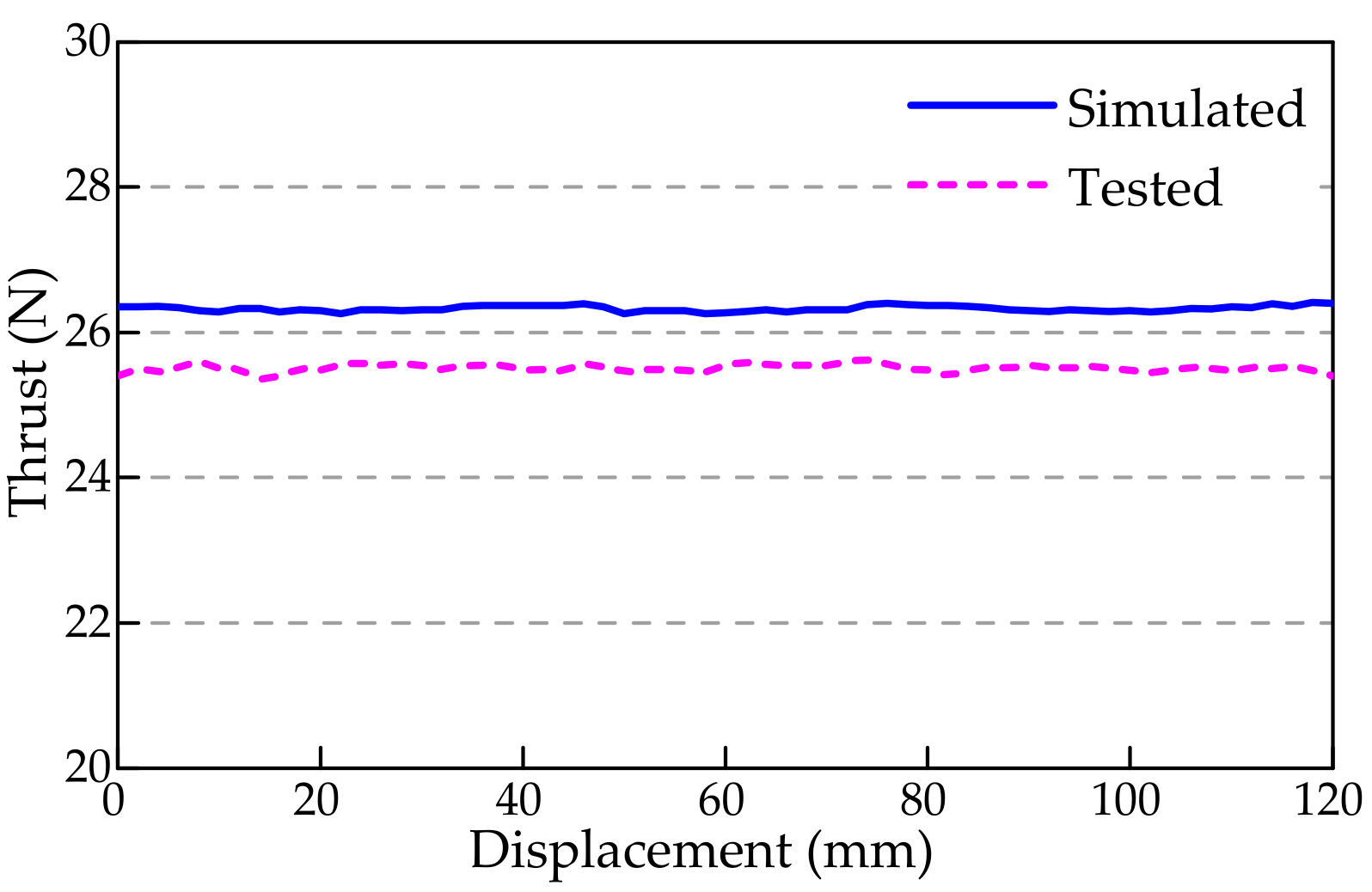
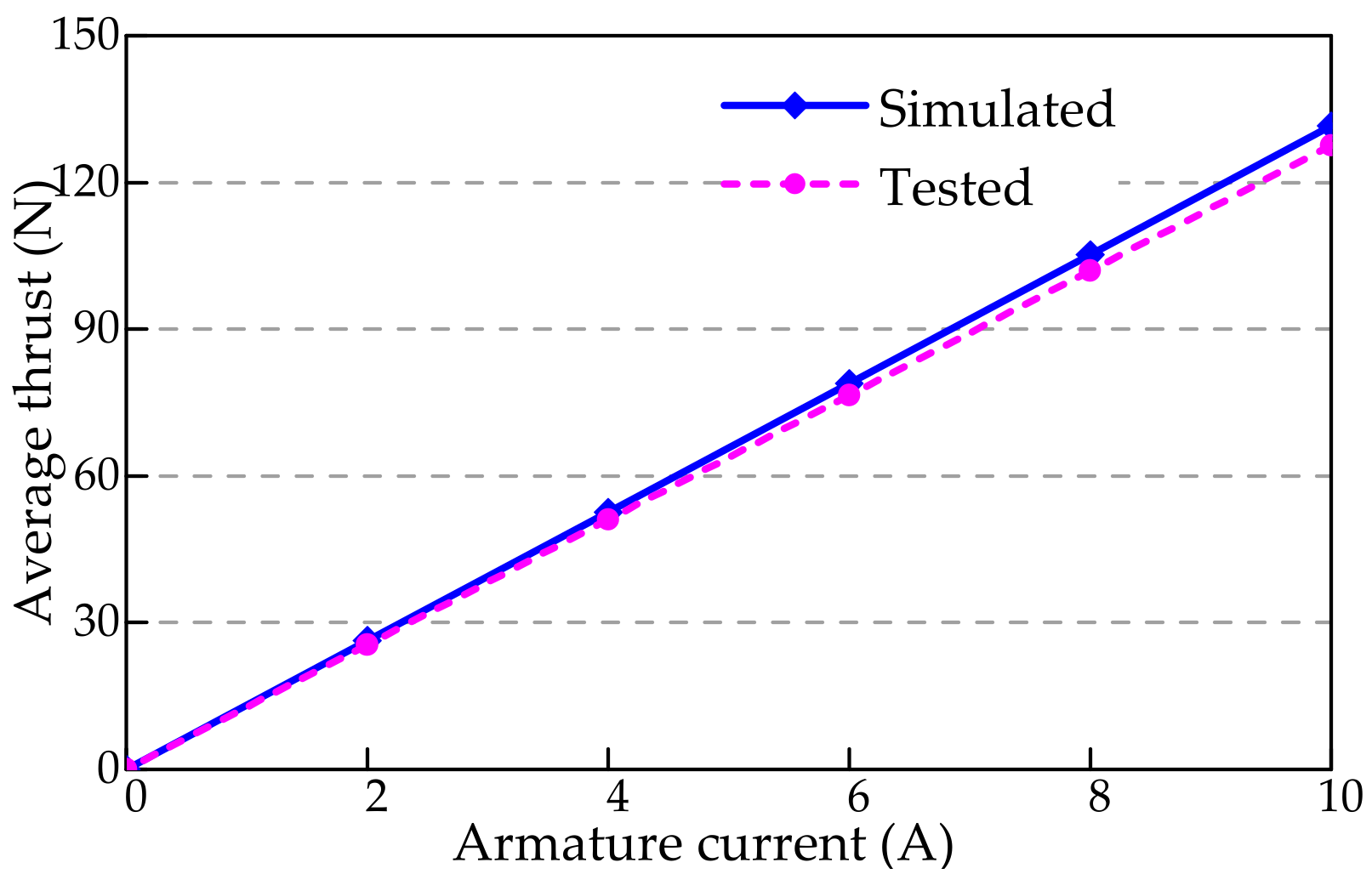
4.2. Simulation Verification
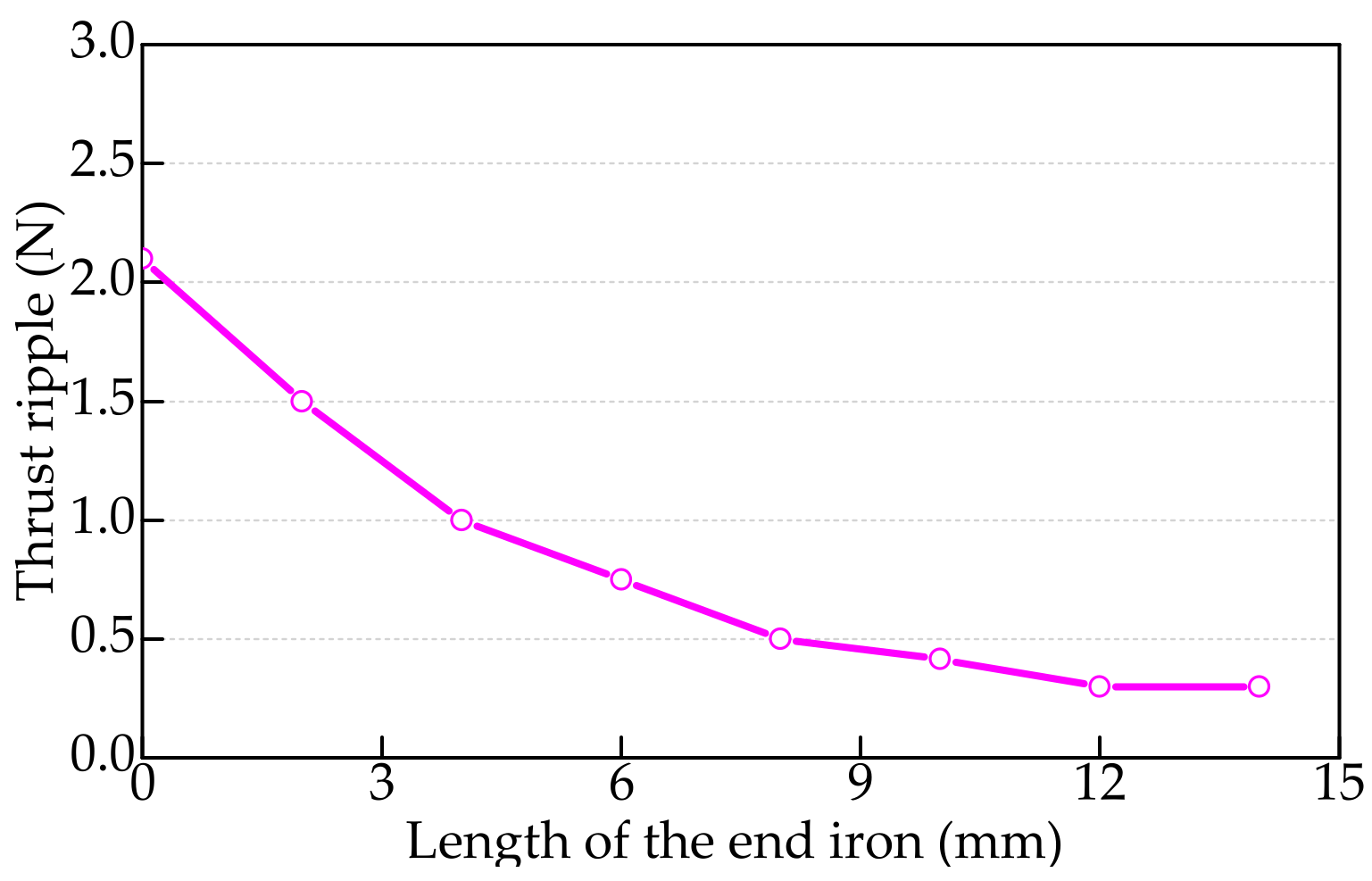
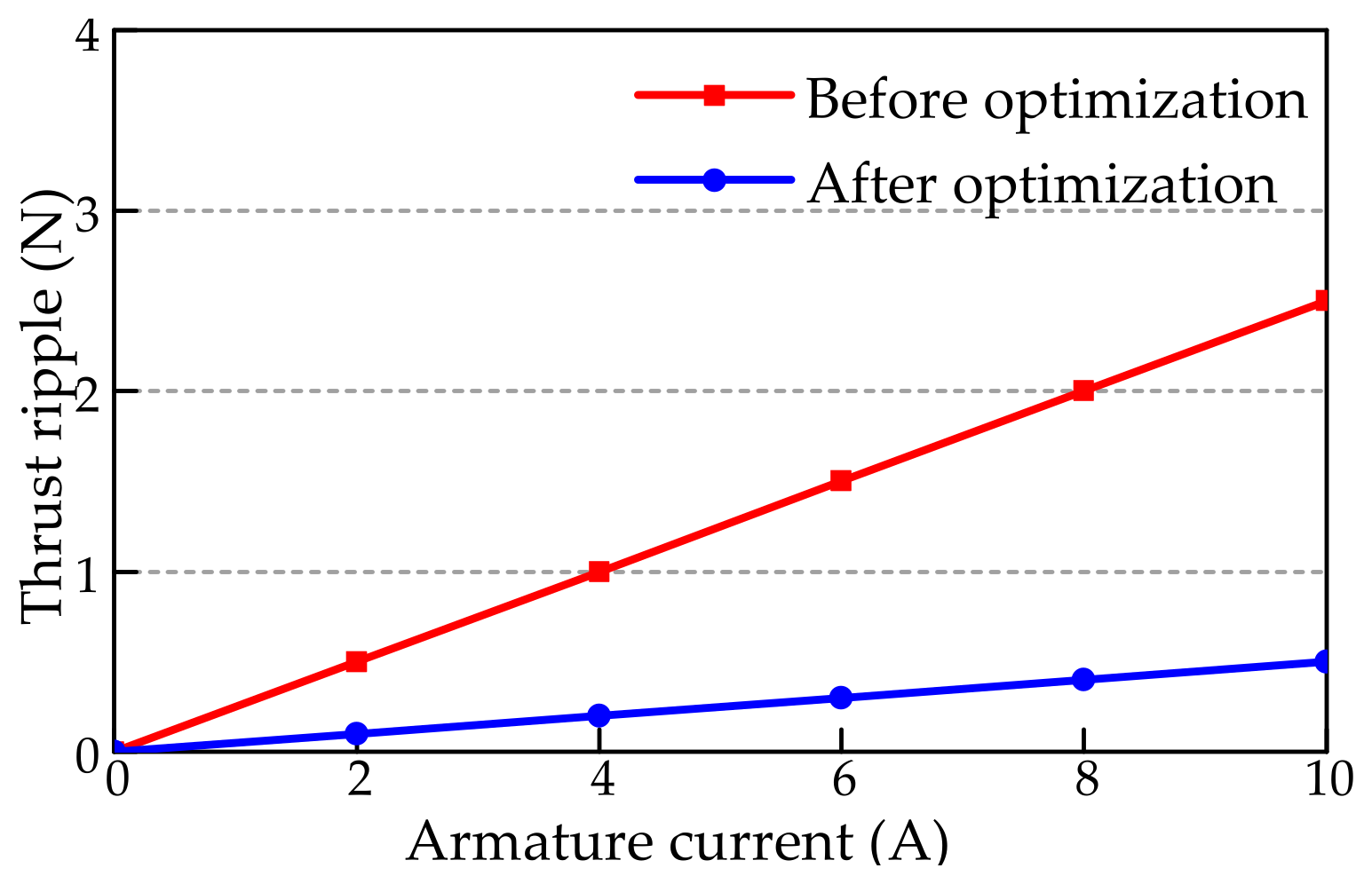
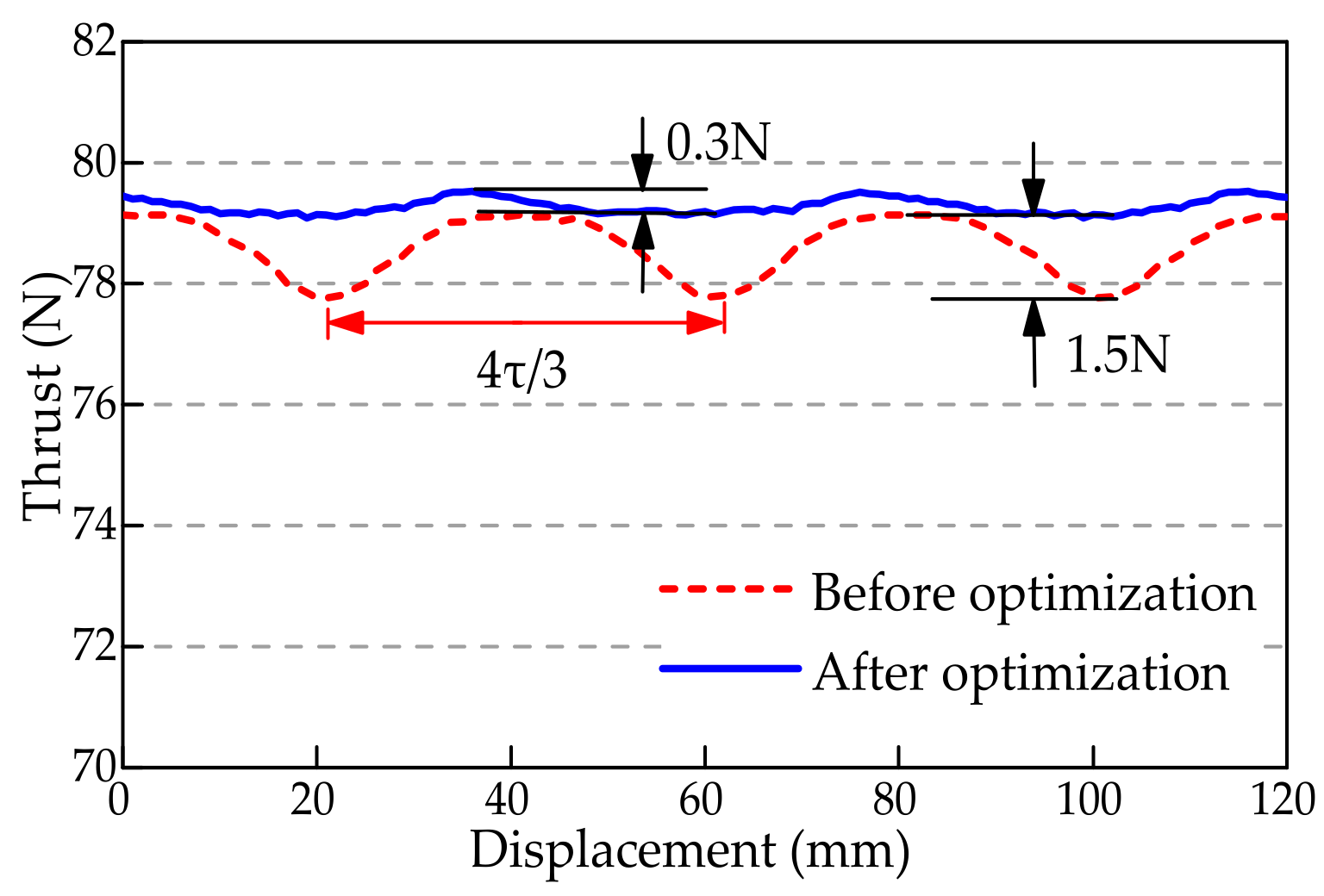
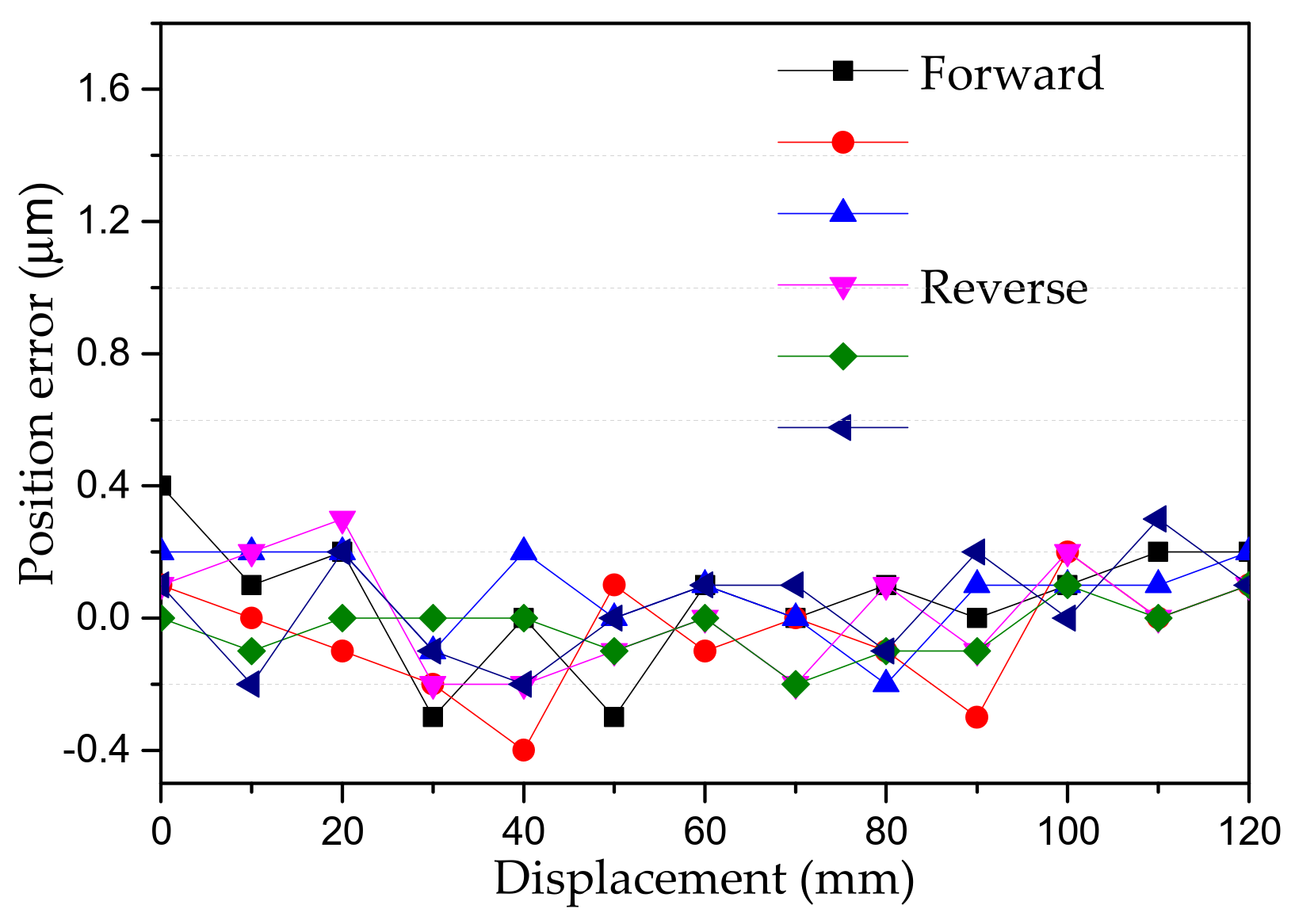
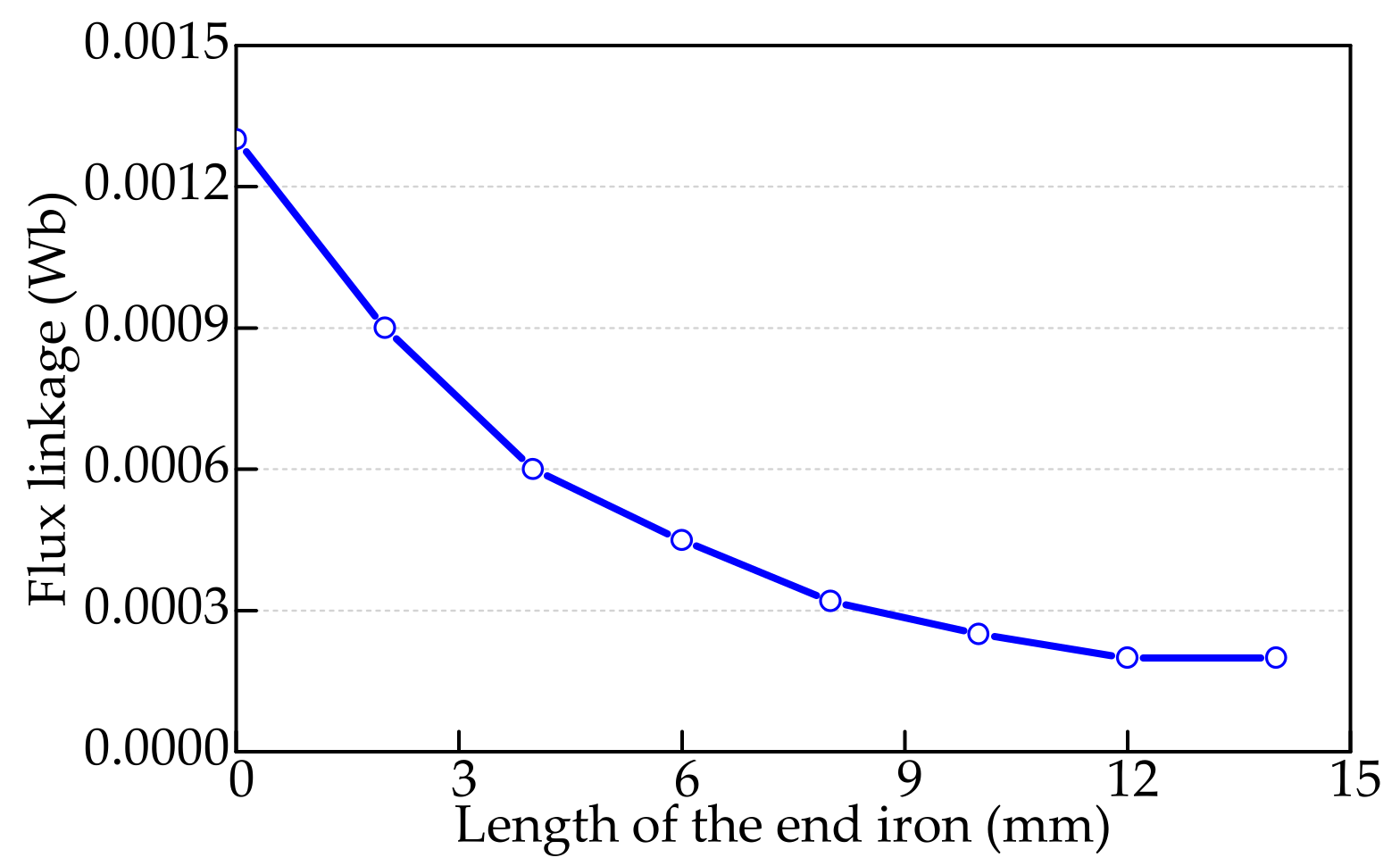
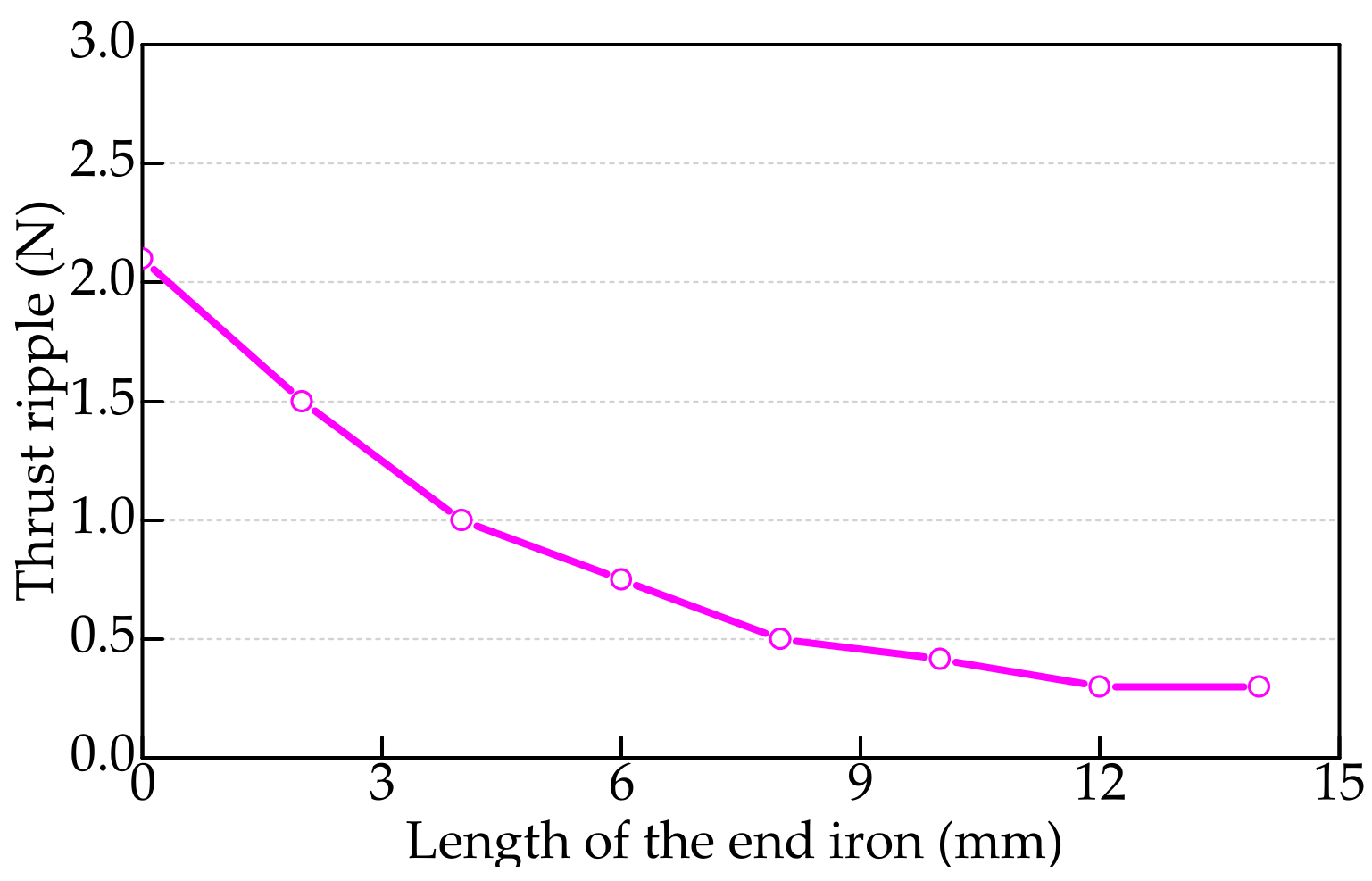
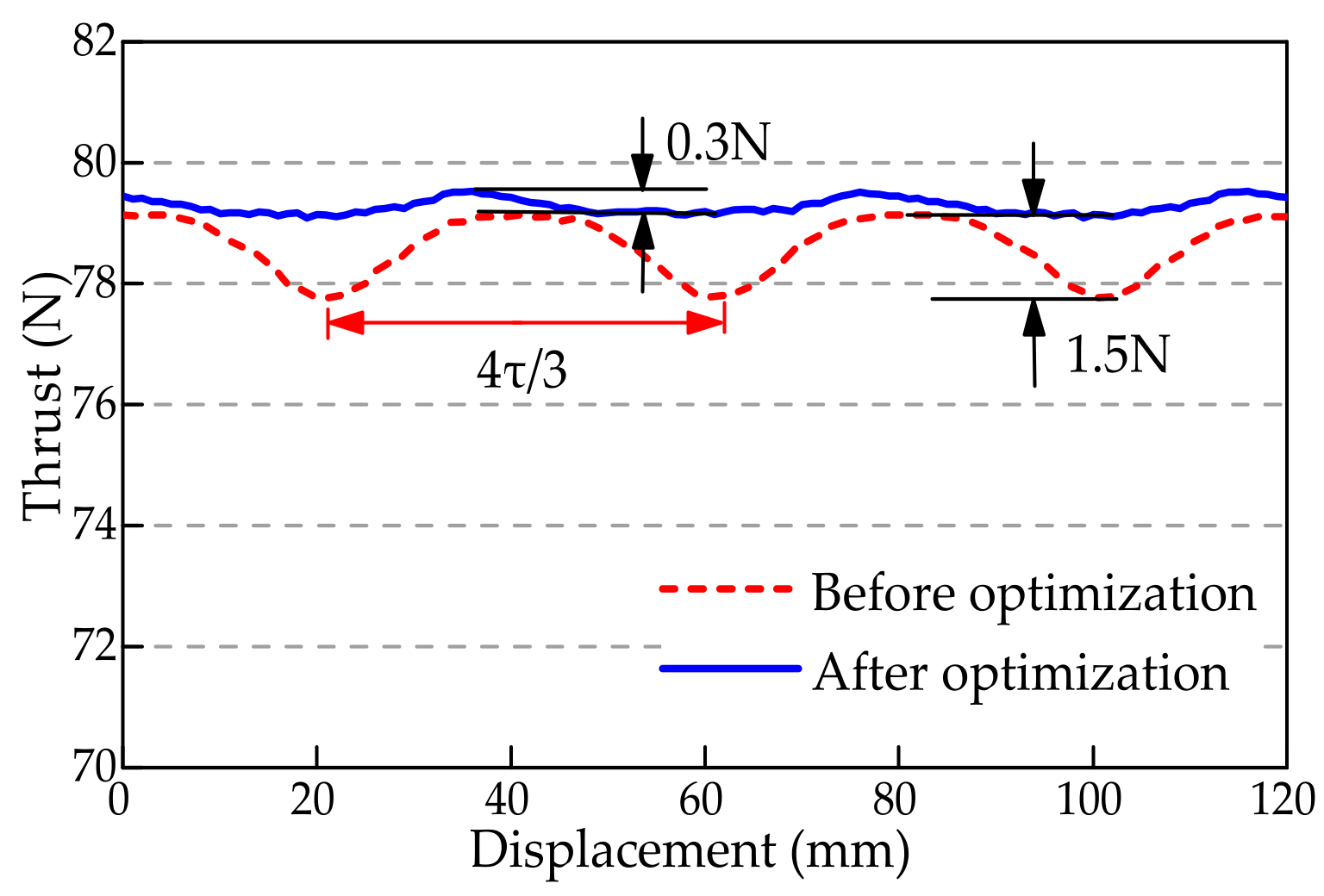
5. Suppression of the End Effect
5.1. End Effect Suppression by Increasing the End Iron Length
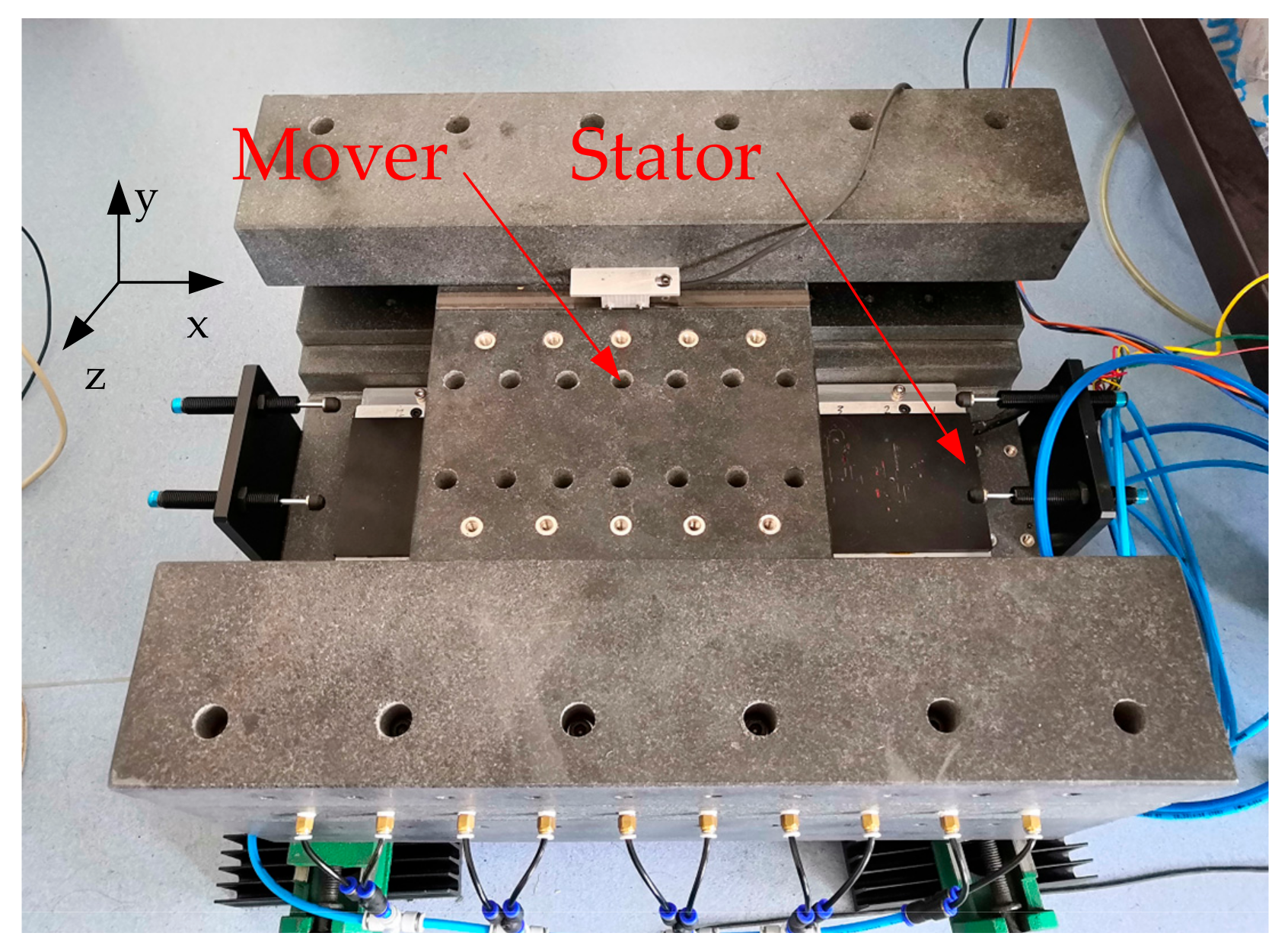
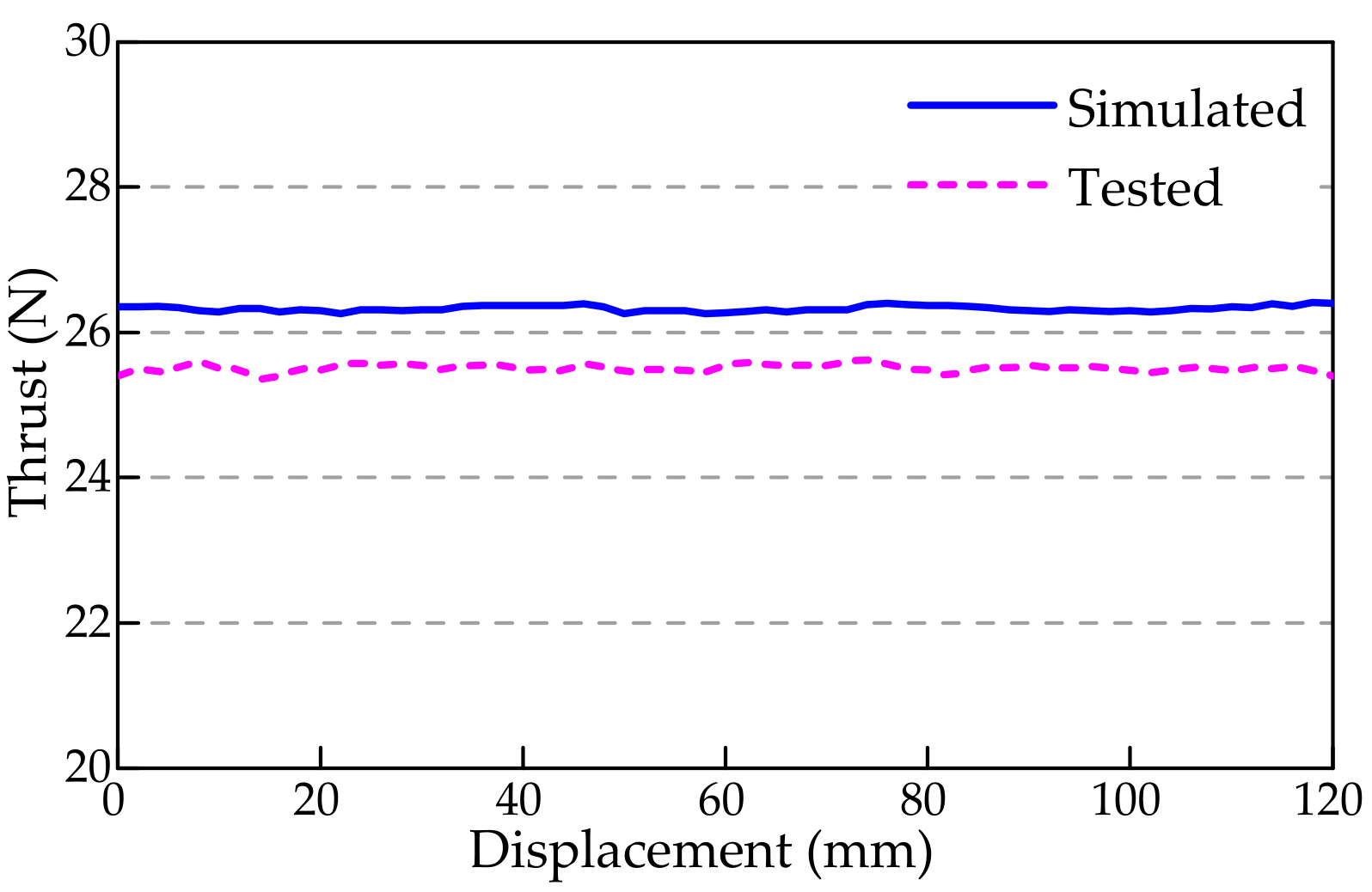
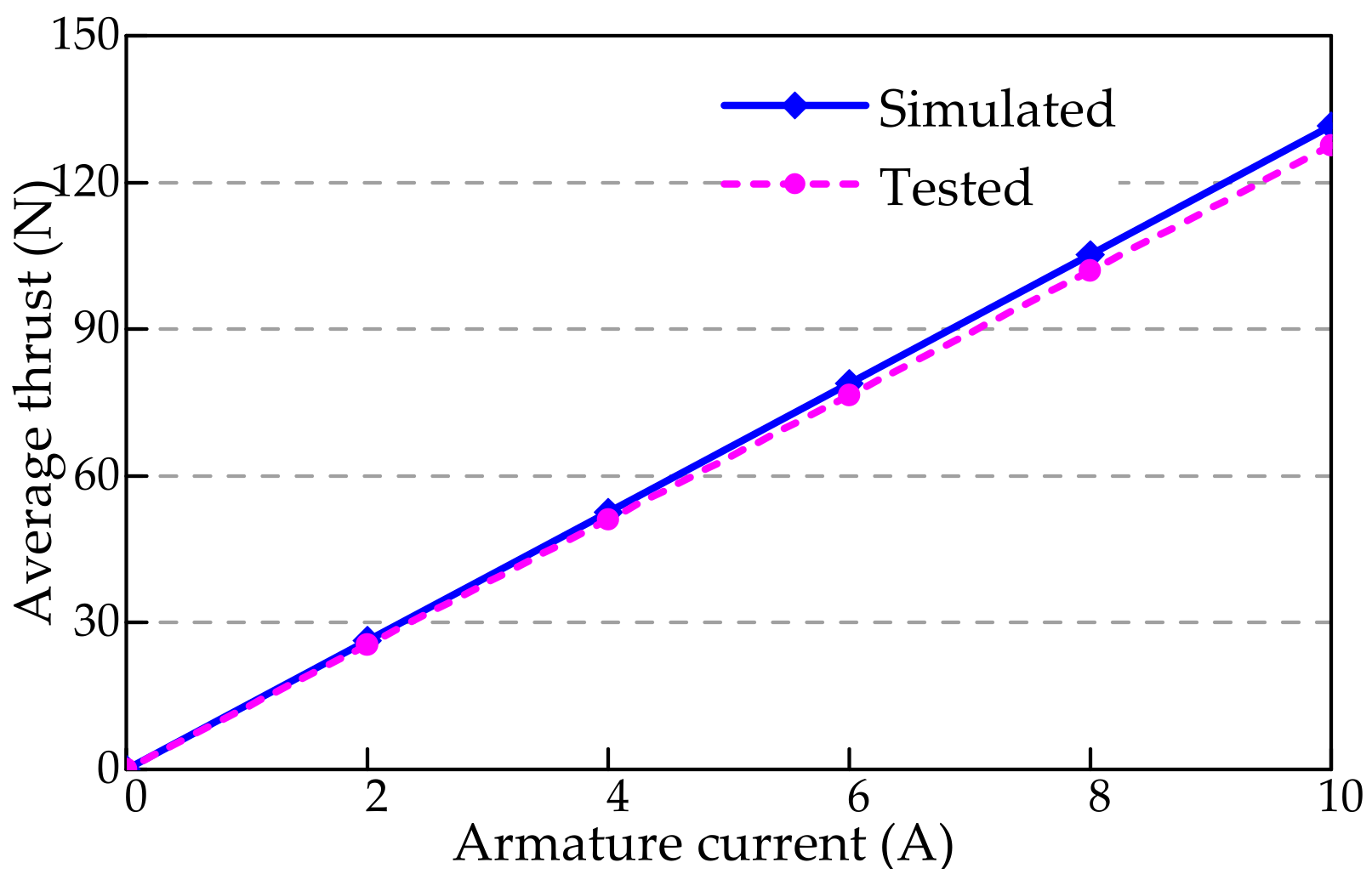
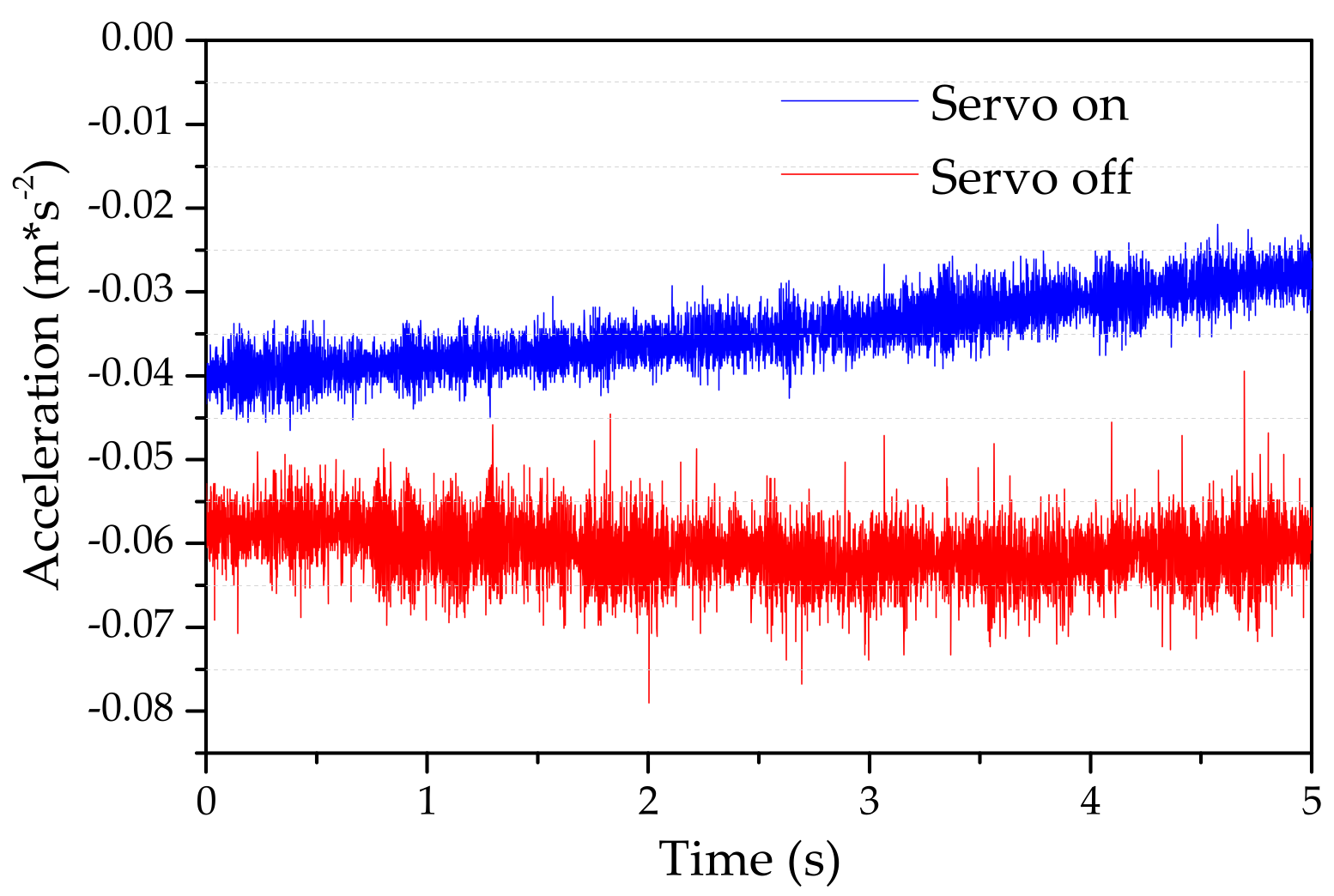
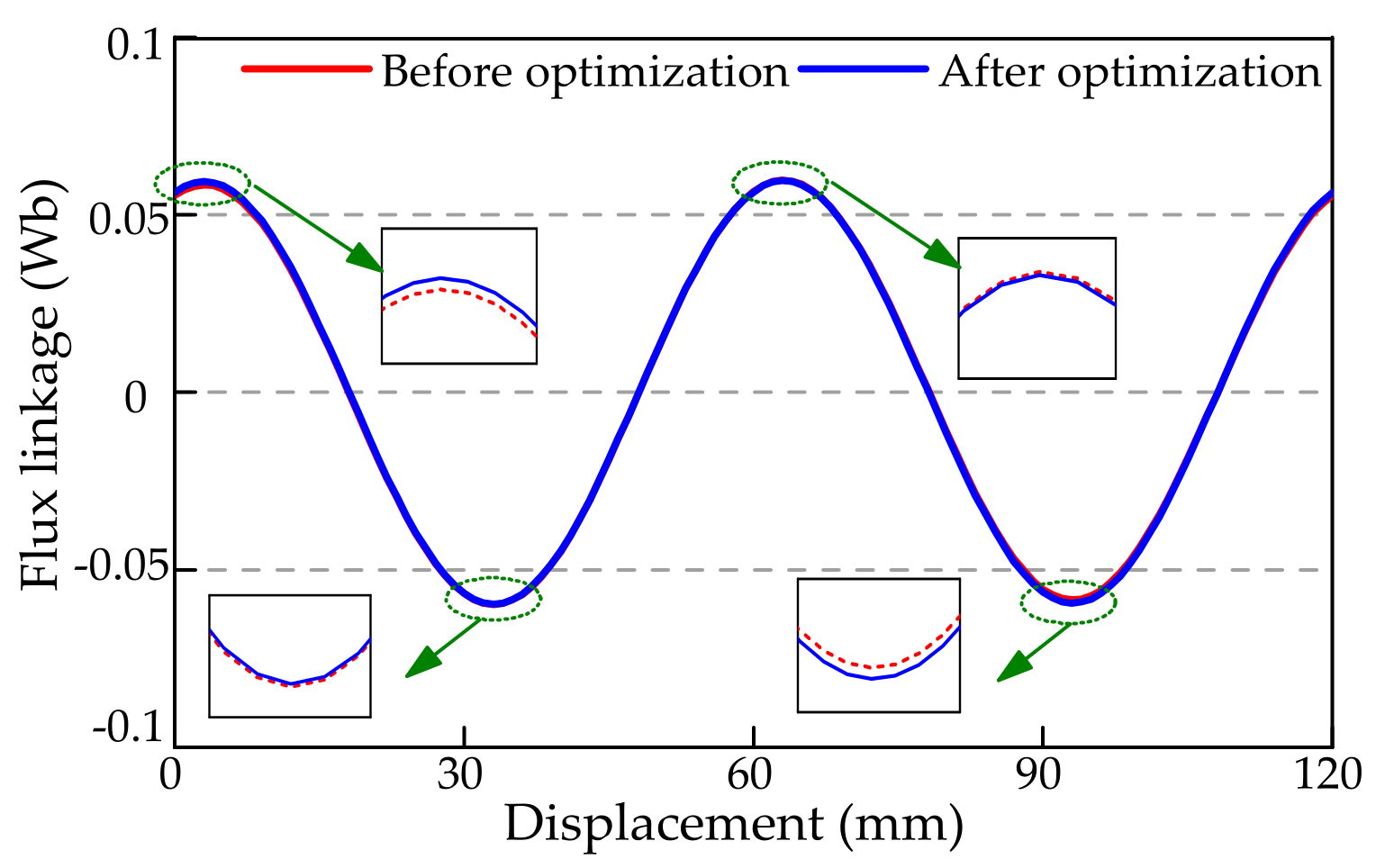
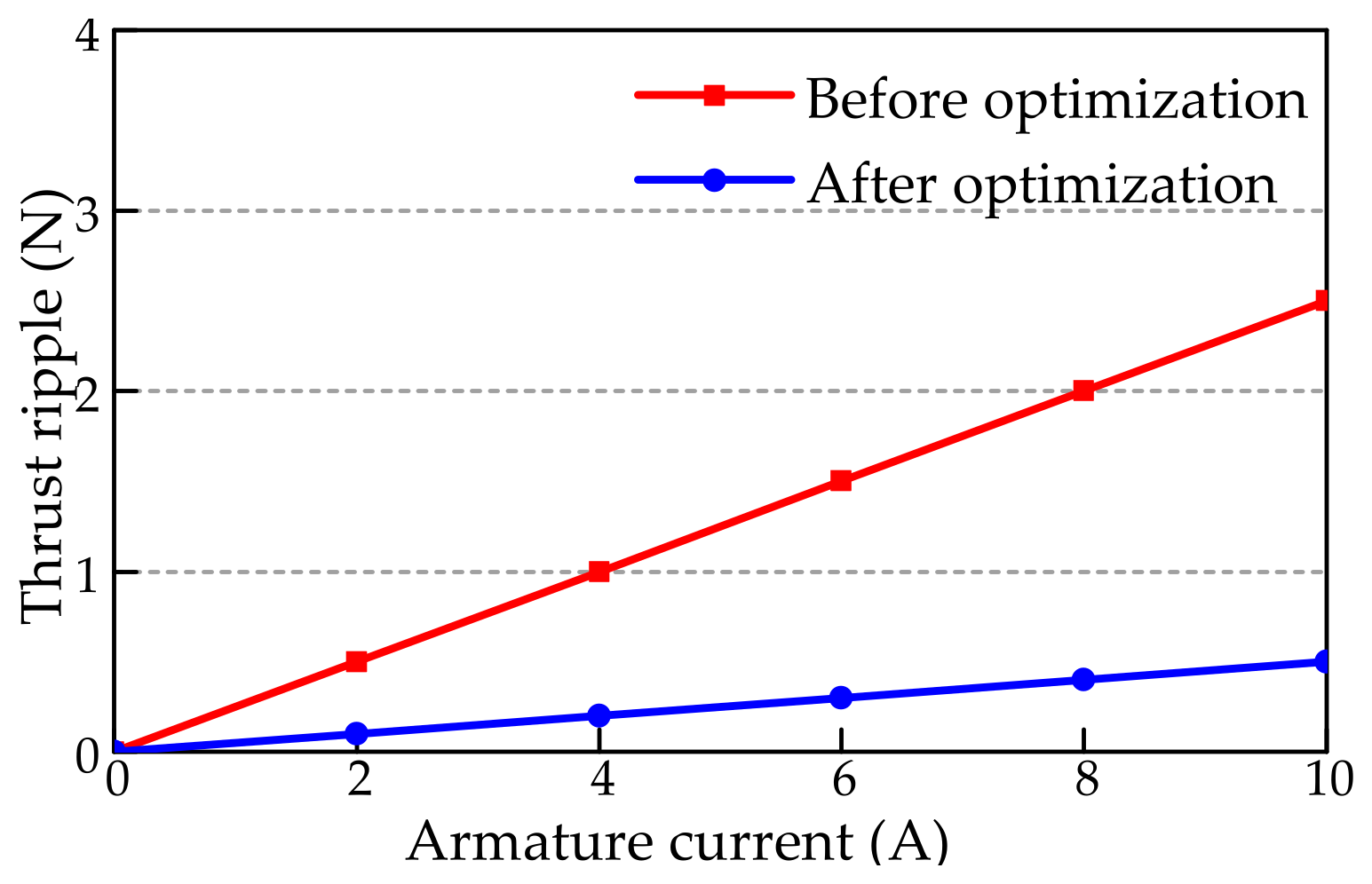
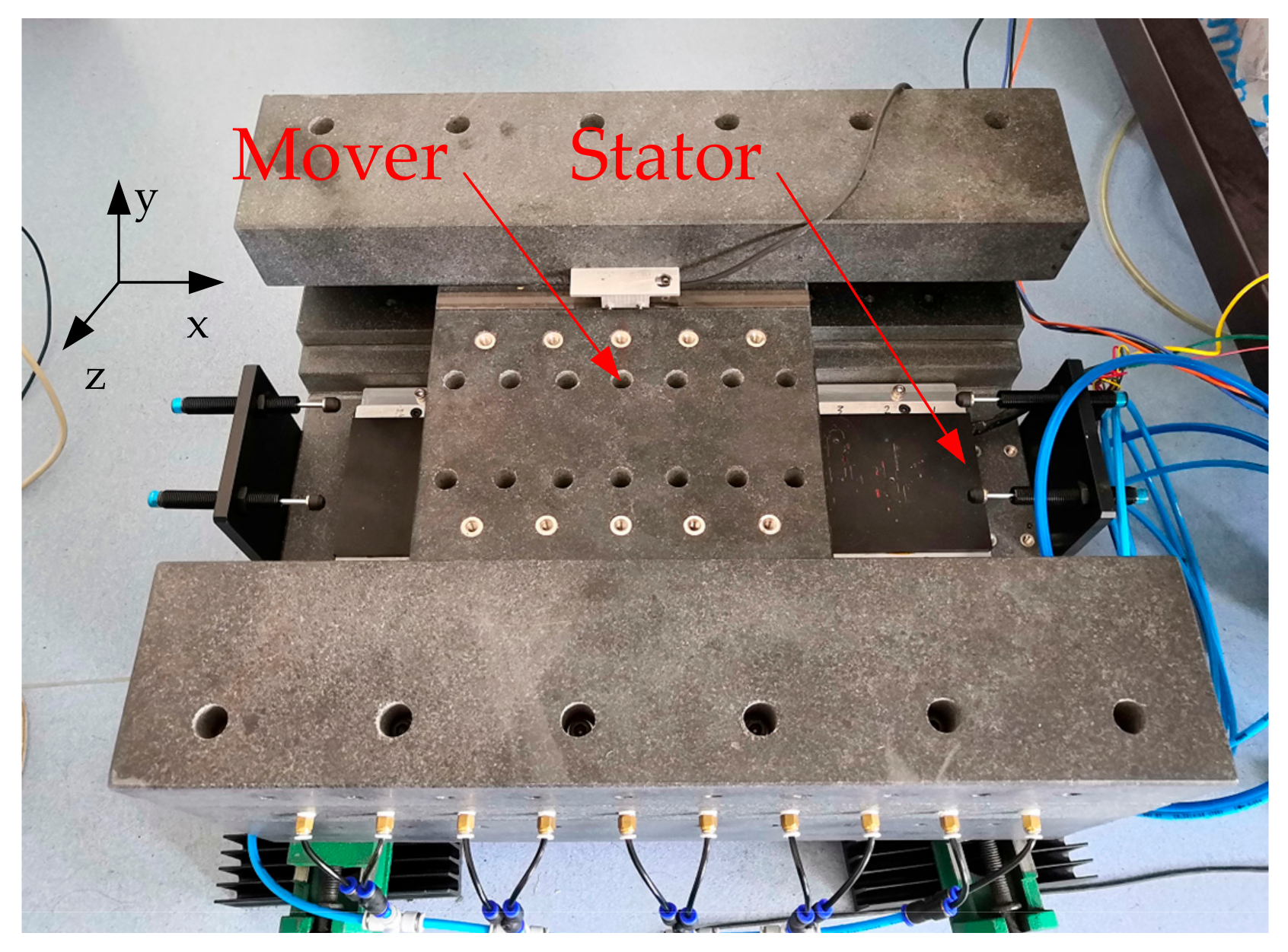
5.2. Experimental Verification
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Li, L.Y.; Tang, Y.B.; Liu, J.X. Multiobjective Design Optimization of Ironless Permanent Magnet Linear Synchronous Motors for Improved Thrust and Reduced Thrust Ripple. Appl. Mech. Mater. 2013, 416–417, 395–400. [Google Scholar]
- Kang, G.H.; Hong, J.P.; Kim, G.T. A novel design of an air-core type permanent magnet linear brushless motor by space harmonics field analysis. IEEE Trans. Magn. 2001, 37, 3732–3736. [Google Scholar] [CrossRef]
- Zhi, F.; Zhang, M.; Zhu, Y.; Li, X. Analysis and Elimination of Harmonics in Force of Ironless Permanent Magnet Linear Synchronous Motor. Proc. Chin. Soc. Electr. Eng. 2017, 37, 2101–2109. [Google Scholar]
- Lee, S.; Kim, S.; Saha, S.; Zhu, Y.; Cho, Y. Optimal structure design for minimizing detent force of PMLSM for a rope-less elevator. IEEE Trans. Magn. 2014, 16, 64. [Google Scholar]
- Ma, M.; Li, L.; He, Z.; Chan, C. Influence of longitudinal end effects on electromagnetic performance of a permanent magnet slot less linear launcher. IEEE Trans. Plasma Sci. 2013, 41, 1161–1166. [Google Scholar] [CrossRef]
- Zhu, Y.W.; Lee, S.G.; Chung, K.S.; Cho, Y.H. Investigation of Auxiliary Poles Design Criteria on Reduction of End Effect of Detent Force for PMLSM. IEEE Trans. Magn. 2009, 45, 2863–2866. [Google Scholar] [CrossRef]
- Li, J.; Huang, X.; Zhou, B.; Yu, H.; Huang, Q. Design principle of a 16-pole 18-slot two-sectional modular permanent magnet linear synchronous motor with optimisation of its end tooth. IET Electr. Power Appl. 2020, 14, 441–447. [Google Scholar] [CrossRef]
- Li, A.L.; Ma, B.M.; Chen, C.Q. Detent force analysis in permanent magnet linear synchronous motor considering longitudinal end effects. In Proceedings of the 2012 15th International Conference on Electrical Machines and Systems (ICEMS), Sapporo, Japan, 21–24 October 2012; pp. 1–5. [Google Scholar]
- Jin, H.; Zhao, X.; Wang, T. Modified complementary sliding mode control with disturbance compensation for permanent magnet linear synchronous motor servo system. IET Electr. Power Appl. 2020, 14, 2128–2135. [Google Scholar] [CrossRef]
- Danielsson, O.; Leijon, M. Flux distribution in linear permanent-magnet synchronous machines including longitudinal end effects. IEEE Trans. Magn. 2007, 43, 3197–3201. [Google Scholar]
- Wang, X.; Yi, P.; Zhou, Z.; Sun, Z.; Ruan, W. Improvements in the permanent magnet synchronous motor torque model using incremental inductance. IET Electr. Power Appl. 2020, 14, 109–118. [Google Scholar] [CrossRef]
- Jung, I.S.; Yoon, S.B.; Shim, J.H.; Hyun, D.S. Analysis of forces in a short primary type and a short secondary type permanent magnet linear synchronous motor. . IEEE Trans. Energy Convers 1999, 14, 1265–1270. [Google Scholar] [CrossRef]
- Ma, M.; Li, L.; Zhang, J.; Yu, J.; Zhang, H.; Jin, Y. Analytical Methods for Minimizing Detent Force in Long-stator PM Linear Motor Including Longitudinal End Effects. IEEE Trans. Magn. 2015, 51, 1–4. [Google Scholar] [CrossRef]
- Luo, H.-H.; Wu, J.; Chang, W.-S. Minimizing Thrust Fluctuation in Moving-Magnet Permanent-Magnet Brushless Linear DC Motors. IEEE Trans. Magn. 2007, 43, 1968–1972. [Google Scholar] [CrossRef]
- Li, H.; Li, X.; Zhao, K.; Li, Z. Influence of Magnetic Structure on Electromagnetic and Dynamic Properties for LPMBLDCM. IEEE Trans. Plasma Sci. 2015, 43, 1277–1282. [Google Scholar] [CrossRef]
- Bewley, L.V. Two-dimensional fields in electrical engineering. Stud. Q. J. 1948, 20, 91–92. [Google Scholar]
- Cullen, A.L. Analysis and computation of electric and magnetic field problems. Proc. IEEE 2005, 52, 1086. [Google Scholar] [CrossRef]
- Zarko, D.; Ban, D.; Lipo, T.A. Analytical Calculation of Magnetic Field Distribution in the Slotted Air Gap of a Surface Permanent-Magnet Motor Using Complex Relative Air-Gap Permeance. IEEE Trans. Magn. 2006, 42, 1828–1837. [Google Scholar] [CrossRef]
- Baudart, F.; Matagne, E.; Dehez, B.; Labrique, F. Analytical prediction of cogging torque in surface mounted permanent magnet motors. Math. Comput. Simul. 2013, 90, 205–217. [Google Scholar] [CrossRef]
- Sakellaris, J.; Meunier, G.; Raizer, A.; Darcherif, A. The impedance boundary condition applied to the finite element method using the magnetic vector potential as state variable: A rigorous solution for high frequency axisymmetric problems. IEEE Trans. Magn. 1992, 28, 1643–1646. [Google Scholar] [CrossRef]
- Youn, S.W.; Lee, J.J.; Yoon, H.S.; Koh, C.S. A New Cogging-Free Permanent-Magnet Linear Motor. IEEE Trans. Magn. 2008, 44, 1785–1790. [Google Scholar] [CrossRef]
- Huang, X.Z.; Li, J.; Zhang, C.; Qian, Z.Y.; Li, L.; Gerada, D. Electromagnetic and Thrust Characteristics of Double-sided Permanent Magnet Linear Synchronous Motor Adopting Staggering Primaries Structure. IEEE Trans. Ind. Electron. 2018, 66, 4826–4836. [Google Scholar] [CrossRef]
- Tan, Q.; Huang, X.; Li, L.; Wang, M. Analysis of Flux Linkage and Detent Force for a Modular Tubular Permanent Magnet Synchronous Linear Motor with Large Slots. IEEE Trans. Energy Convers. 2019, 34, 1532–1541. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Item | Value |
|---|---|---|
| hp | Height of the primary iron core | 10 mm |
| Height of the winding coil | 4 mm | |
| Virtual slot pitch | 40 mm | |
| Length of the winding coil | 17 mm | |
| L | Length of the secondary iron core | 120 mm |
| w | Width of the primary component | 80 mm |
| hs | Height of the secondary iron core | 12 mm |
| g | Length of the air gap | 0.5 mm |
| τ | Pole pitch | 30 mm |
| Length of the permanent magnet | 26 mm | |
| hm | Height of the permanent magnet | 13 mm |
| Np | Number of poles | 4 |
| Ns | Number of slots | 3 |
| Rated speed of the motor | 0.1 m/s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhou, Y.; Zong, W.; Tan, Q.; Hu, Z.; Sun, T.; Li, L. End Effect Analysis of a Slot-Less Long-Stator Permanent Magnet Linear Synchronous Motor. Symmetry 2021, 13, 1939. https://doi.org/10.3390/sym13101939
Zhou Y, Zong W, Tan Q, Hu Z, Sun T, Li L. End Effect Analysis of a Slot-Less Long-Stator Permanent Magnet Linear Synchronous Motor. Symmetry. 2021; 13(10):1939. https://doi.org/10.3390/sym13101939
Chicago/Turabian StyleZhou, Yue, Wenjun Zong, Qiang Tan, Zhenjiang Hu, Tao Sun, and Liyi Li. 2021. "End Effect Analysis of a Slot-Less Long-Stator Permanent Magnet Linear Synchronous Motor" Symmetry 13, no. 10: 1939. https://doi.org/10.3390/sym13101939
APA StyleZhou, Y., Zong, W., Tan, Q., Hu, Z., Sun, T., & Li, L. (2021). End Effect Analysis of a Slot-Less Long-Stator Permanent Magnet Linear Synchronous Motor. Symmetry, 13(10), 1939. https://doi.org/10.3390/sym13101939