Hybrid Image-Retrieval Method for Image-Splicing Validation



Abstract
1. Introduction
2. Related Work
3. Image-Splicing Localization
4. Image-Splicing Retrieval
4.1. Bag-of-Features-Based Image-Retrieval Using Hamming Embedding
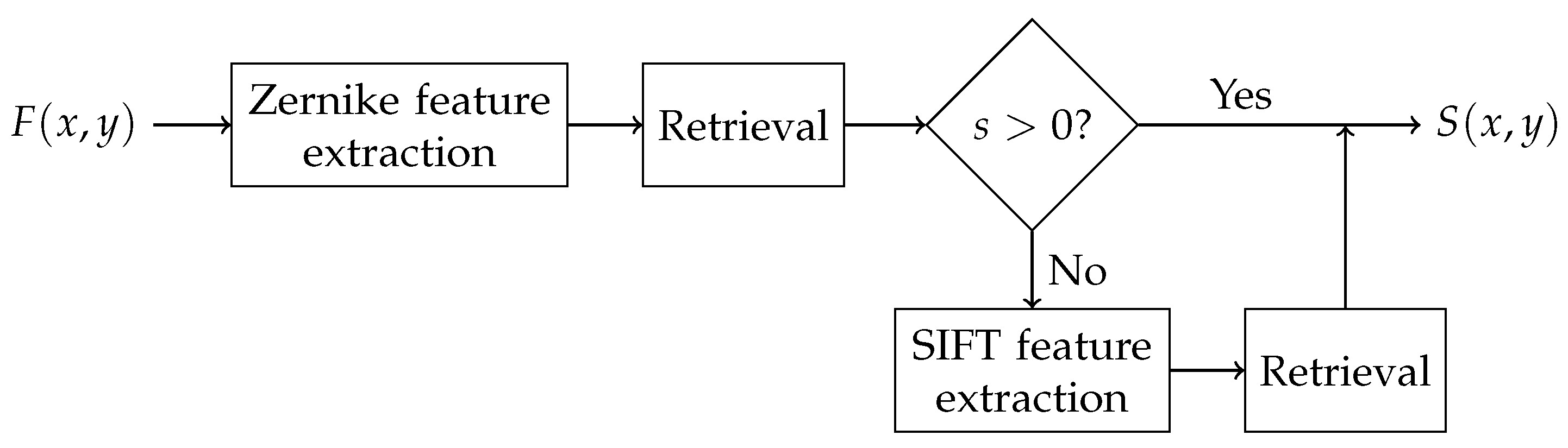
4.2. Hybrid Features-Based Image Retrieval
5. Experimental Evaluation
5.1. Dataset and Experimental Setup
5.2. Evaluation Measures
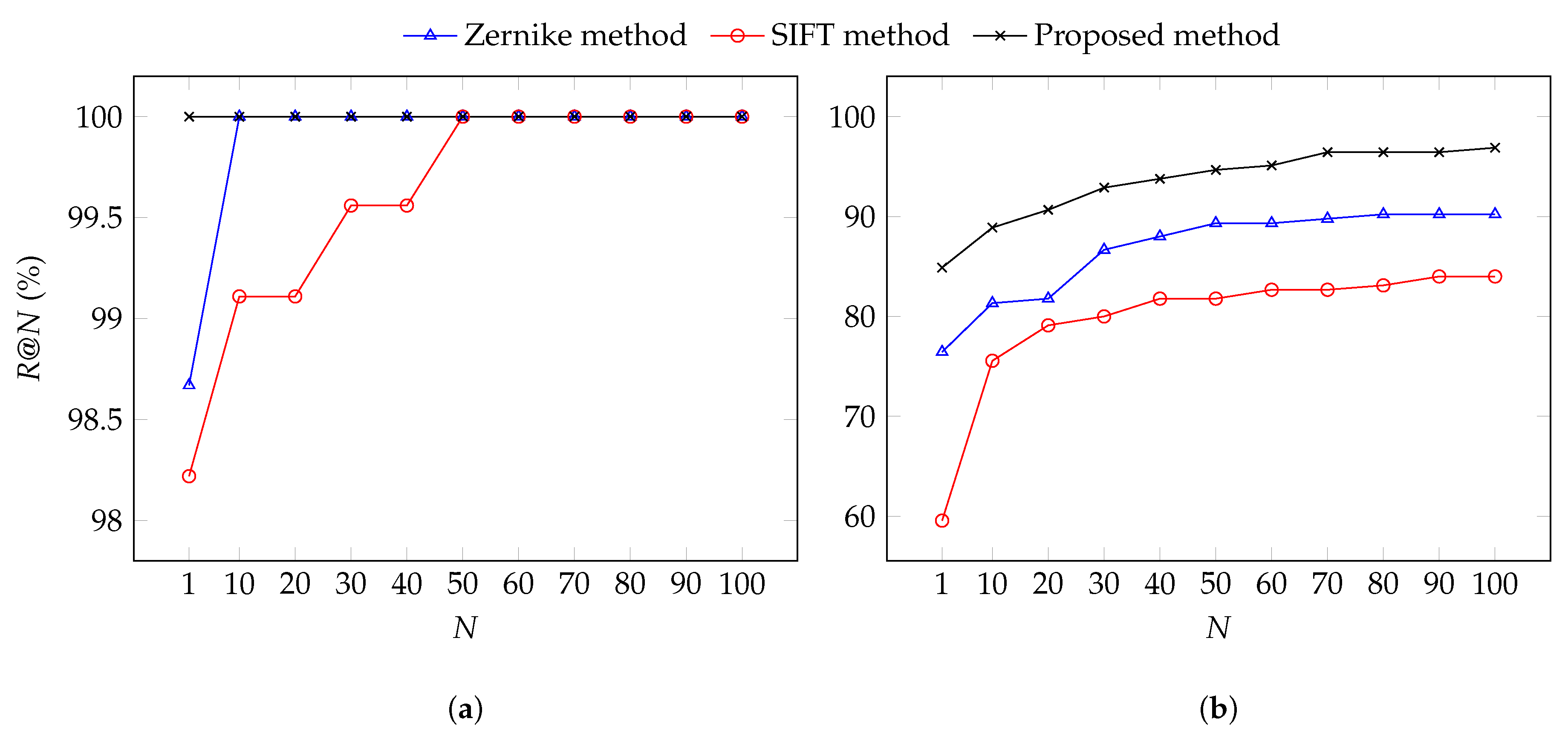
5.3. Image-Splicing Retrieval Results
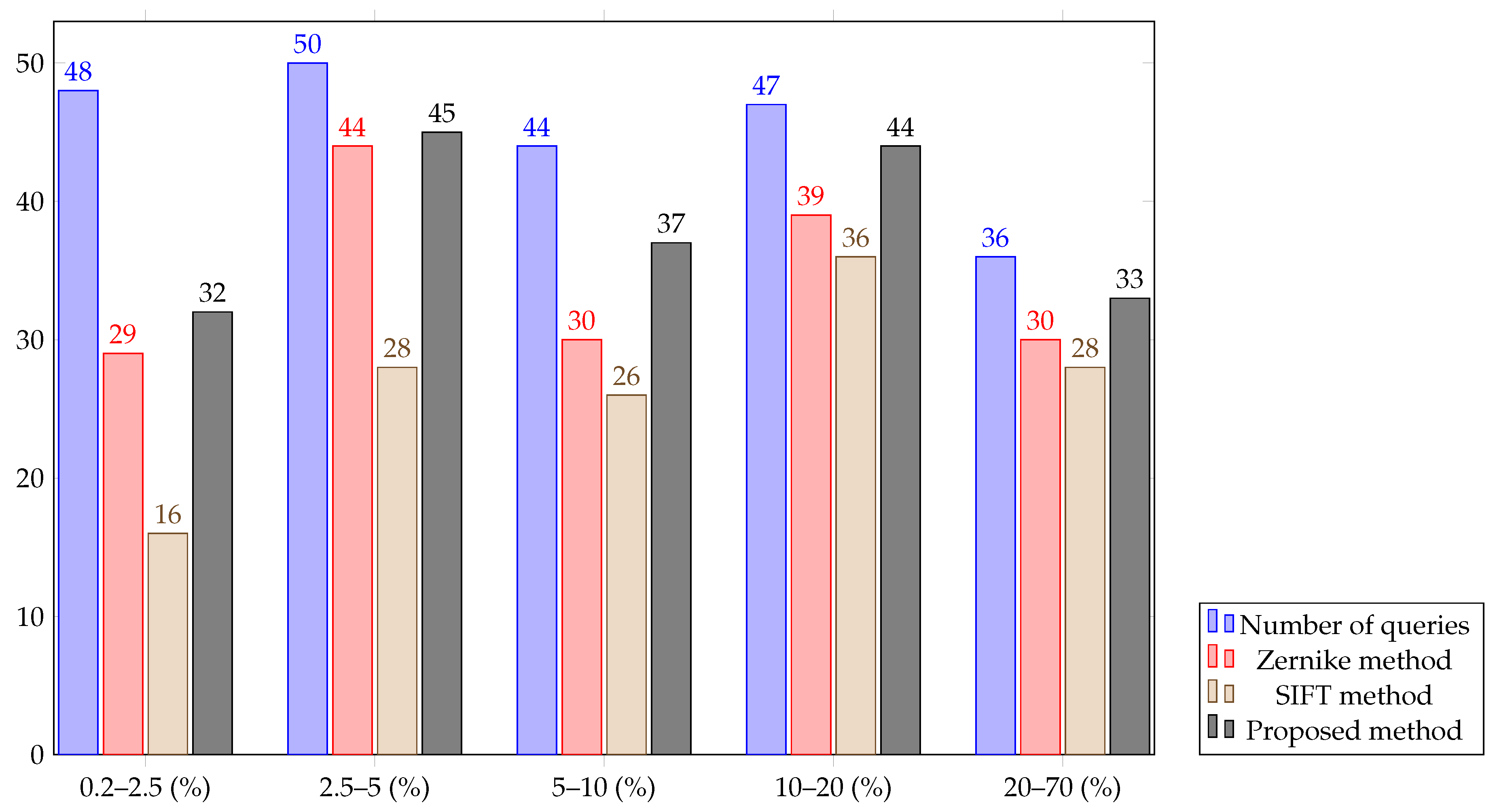
5.4. Analysis of Top-Hit Retrieved Source Image
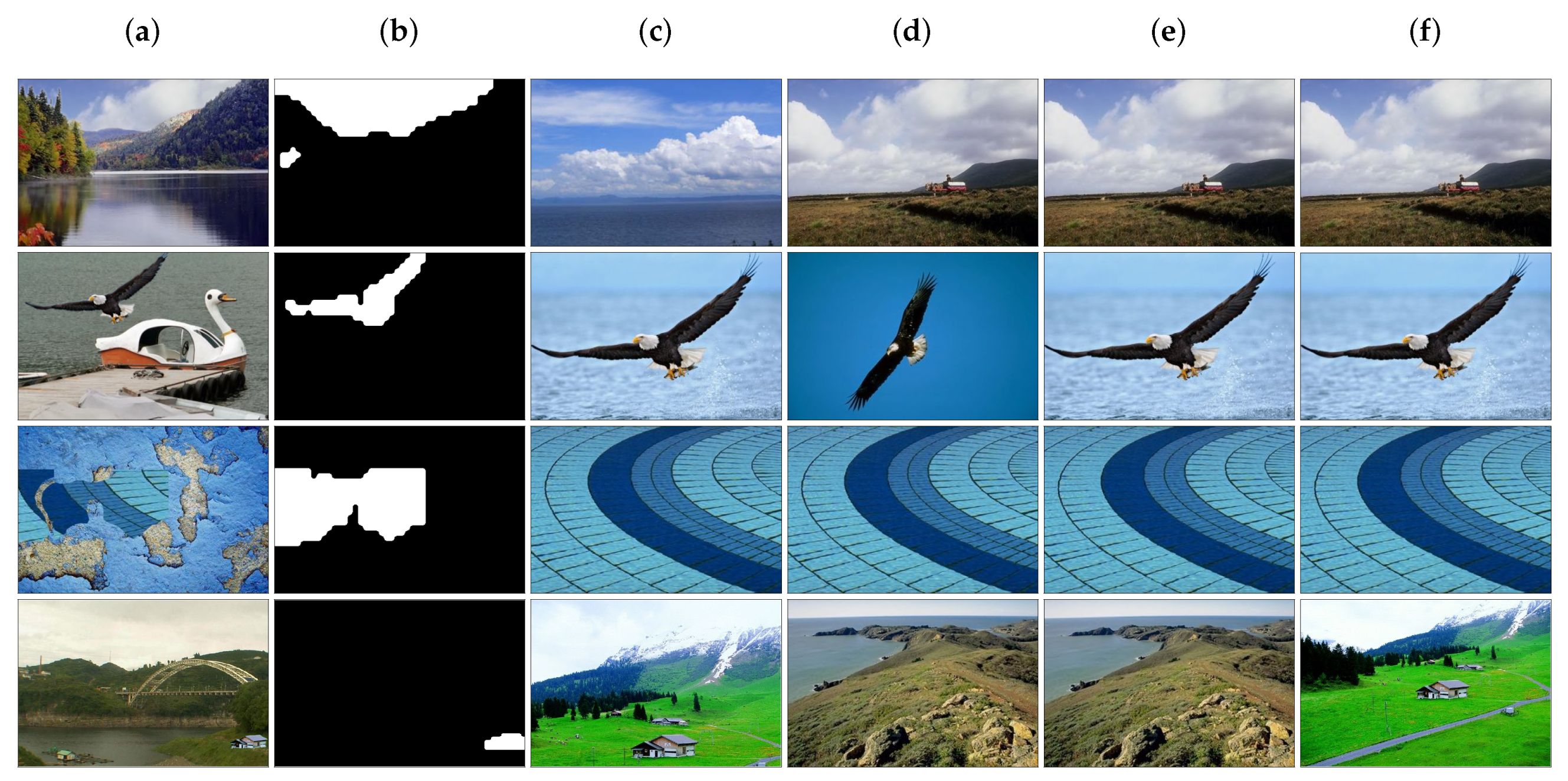
5.5. Image-Splicing Validation
6. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- He, Z.; Lu, W.; Sun, W.; Huang, J. Digital image splicing detection based on Markov features in DCT and DWT domain. Pattern Recognit. 2012, 45, 4292–4299. [Google Scholar] [CrossRef]
- Sheng, H.; Shen, X.; Shi, Z. Image Splicing Detection Based on the Q-Markov Features. In Proceedings of the Pacific-Rim Conference on Multimedia, Hefei, China, 21–22 September 2018; pp. 453–464. [Google Scholar]
- Chen, B.; Qi, X.; Sun, X.; Shi, Y.Q. Quaternion pseudo-Zernike moments combining both of RGB information and depth information for color image splicing detection. J. Vis. Commun. Image Represent. 2017, 49, 283–290. [Google Scholar] [CrossRef]
- Han, J.G.; Park, T.H.; Moon, Y.H.; Eom, I.K. Efficient Markov feature extraction method for image splicing detection using maximization and threshold expansion. J. Electron. Imaging 2016, 25, 023031. [Google Scholar] [CrossRef]
- Pham, N.T.; Lee, J.W.; Kwon, G.R.; Park, C.S. Efficient image splicing detection algorithm based on Markov features. Multimed. Tools Appl. 2018, 77. [Google Scholar] [CrossRef]
- Bondi, L.; Lameri, S.; Guera, D.; Bestagini, P.; Delp, E.J.; Tubaro, S. Tampering Detection and Localization through Clustering of Camera-Based CNN Features. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Honolulu, HI, USA, 21–26 July 2017; pp. 453–464. [Google Scholar]
- Zampoglou, M.; Papadopoulos, S.; Kompatsiaris, Y. Large-scale evaluation of splicing localization algorithms for web images. Multimed. Tools Appl. 2017, 76, 4801–4834. [Google Scholar] [CrossRef]
- Yao, H.; Wang, S.; Zhang, X.; Qin, C.; Wang, J. Detecting Image Splicing Based on Noise Level Inconsistency. Multimed. Tools Appl. 2017, 76, 12457–12479. [Google Scholar] [CrossRef]
- Wu, Y.; Abd-Almageed, W.; Natarajan, P. Deep Matching and Validation Network: An End-to-End Solution to Constrained Image Splicing Localization and Detection. In Proceedings of the 2017 ACM International Conference on Multimedia Conference, Mountain View, CA, USA, 23–27 October 2017; pp. 1480–1502. [Google Scholar]
- Zheng, L.; Yang, Y.; Tian, Q. SIFT Meets CNN: A Decade Survey of Instance Retrieval. IEEE Trans. Pattern Anal. Mach. Intell. 2018, 40, 1224–1244. [Google Scholar] [CrossRef]
- Hong, W.; Chen, M.; Chen, T.S. An efficient reversible image authentication method using improved PVO and LSB substitution techniques. Signal Process. Image Commun. 2017, 58, 111–122. [Google Scholar] [CrossRef]
- Hong, W.; Chen, M.; Chen, T.S.; Huang, C.C. An efficient authentication method for AMBTC compressed images using adaptive pixel pair matching. Multimed. Tools Appl. 2018, 77, 4677–4695. [Google Scholar] [CrossRef]
- Zeng, H.; Zhan, Y.; Kang, X.; Lin, X. Image splicing localization using PCA-based noise level estimation. Multimed. Tools Appl. 2017, 76, 4783–4799. [Google Scholar] [CrossRef]
- Chen, C.; McCloskey, S.; Yu, J. Image Splicing Detection via Camera Response Function Analysis. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 1876–1885. [Google Scholar]
- Wang, P.; Liu, F.; Yang, C.; Luo, X. Blind forensics of image gamma transformation and its application in splicing detection. J. Vis. Commun. Image Represent. 2018, 55, 80–90. [Google Scholar] [CrossRef]
- Bappy, J.H.; Roy-Chowdhury, A.K.; Bunk, J.; Nataraj, L.; Manjunath, B.S. Exploiting Spatial Structure for Localizing Manipulated Image Regions. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Venice, Italy, 22–29 Octobor 2017; pp. 4970–4979. [Google Scholar]
- Brogan, J.; Bestagini, P.; Bharati, A.; Pinto, A.; Moreira, D.; Bowyer, K.; Flynn, P.; Rocha, A.; Scheirer, W. Spotting the Difference: Context Retrieval and Analysis for Improved Forgery Detection and Localization. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017; pp. 4078–4082. [Google Scholar]
- Maigrot, C.; Kijak, E.; Claveau, V. Context-aware forgery localization in social-media images: A feature-based approach evaluation. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Athens, Greece, 7–10 October 2018; pp. 545–549. [Google Scholar]
- Lin, Z.; He, J.; Tang, X.; Tang, C.K. Fast, automatic and fine-grained tampered JPEG image detection via DCT coefficient analysis. Pattern Recognit. 2009, 42, 2492–2501. [Google Scholar] [CrossRef]
- Khotanzad, A.; Hong, Y.H. Invariant Image Recognition by Zernike Moments. IEEE Trans. Pattern Anal. Mach. Intell. 1990, 12, 489–497. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Pinto, A.; Moreira, D.; Bharati, A.; Brogan, J.; Bowyer, K.; Flynn, P.; Scheirer, W.; Rocha, A. Provenance filtering for multimedia phylogeny. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017; pp. 1502–1506. [Google Scholar]
- Bharati, A.; Moreira, D.; Pinto, A.; Brogan, J.; Bowyer, K.; Flynn, P.; Scheirer, W.; Rocha, A. U-phylogeny: Undirected provenance graph construction in the wild. In Proceedings of the IEEE International Conference on Image Processing (ICIP), Beijing, China, 17–20 September 2017; pp. 1517–1521. [Google Scholar]
- Moreira, D.; Bharati, A.; Brogan, J.; Pinto, A.; Parowski, M.; Bowyer, K.W.; Flynn, P.J.; Rocha, A.; Scheirer, W.J. Image Provenance Analysis at Scale. IEEE Trans. Image Process. 2018, 27, 6109–6123. [Google Scholar]
- Khotanzad, A.; Lu, J.H. Classification of invariant image representations using a neural network. IEEE Trans. Acoust. 1990, 38, 1028–1038. [Google Scholar] [CrossRef]
- Hwang, S.K.; Kim, W.Y. A novel approach to the fast computation of Zernike moments. Pattern Recognit. 2006, 39, 2065–2076. [Google Scholar] [CrossRef]
- Papakostas, G.A.; Boutalis, Y.S.; Karras, D.A.; Mertzios, B.G. A new class of Zernike moments for computer vision applications. Inf. Sci. 2007, 177, 2802–2819. [Google Scholar] [CrossRef]
- Papakostas, G.A.; Boutalis, Y.S.; Karras, D.A.; Mertzios, B.G. Pattern classification by using improved wavelet compressed Zernike moments. Appl. Math. Comput. 2009, 212, 162–176. [Google Scholar] [CrossRef]
- Ryu, S.J.; Lee, M.J.; Lee, H.K. Detection of Copy-Rotate-Move Forgery Using Zernike Moments. In Proceedings of the International Workshop on Information Hiding, Calgary, AB, Canada, 28–30 June 2010; pp. 51–65. [Google Scholar]
- Christlein, V.; Riess, C.; Jordan, J.; Riess, C.; Angelopoulou, E. An Evaluation of Popular Copy-Move Forgery Detection Approaches. IEEE Trans. Inf. Forensic Secur. 2012, 7, 1841–1854. [Google Scholar] [CrossRef]
- Park, C.S.; Kim, C.; Lee, J.; Kwon, G.R. Rotation and scale invariant upsampled log-polar fourier descriptor for copy-move forgery detection. Multimed. Tools Appl. 2016, 75, 16577–16595. [Google Scholar] [CrossRef]
- Zheng, J.; Liu, Y.; Ren, J.; Zhu, T.; Yan, Y.; Yang, H. Fusion of block and keypoints based approaches for effective copy-move image forgery detection. Multidimens. Syst. Signal Process. 2016, 27, 989–1005. [Google Scholar] [CrossRef]
- Fahmy, O.M. A new Zernike moments based technique for camera identification and forgery detection. Signal Image Video Process. 2017, 11, 785–792. [Google Scholar] [CrossRef]
- Liu, Y.; Huang, T. Exposing video inter frame forgery by Zernike opponent chromaticity moments and coarseness analysis. Multimed. Syst. 2017, 23, 223–238. [Google Scholar] [CrossRef]
- Kim, H.S.; Lee, H.K. Invariant Image Watermark Using Zernike Moments. IEEE Trans. Circuits Syst. Video Technol. 2003, 13, 766–775. [Google Scholar]
- Lutovac, B.; Daković, M.; Stanković, S.; Orović, I. An algorithm for robust image watermarking based on the DCT and Zernike moments. Multimed. Tools Appl. 2017, 76, 23333–23352. [Google Scholar] [CrossRef]
- Tsougenis, E.D.; Papakostas, G.A.; Koulouriotis, D.E.; Tourassis, V.D. Performance evaluation of moment-based watermarking methods: A review. J. Syst. Softw. 2012, 85, 1864–1884. [Google Scholar] [CrossRef]
- Kumar, Y.; Aggarwal, A.; Tiwari, S.; Singh, K. An efficient and robust approach for biomedical image retrieval using Zernike moments. Biomed. Signal Process. Control 2018, 39, 459–473. [Google Scholar] [CrossRef]
- Zhou, W.; Li, H.; Tian, Q. Recent Advance in Content-based Image Retrieval: A Literature Survey. arXiv, 2017; arXiv:1706.06064. [Google Scholar]
- Jegou, H.; Douze, M.; Schmid, C. Hamming Embedding and Weak Geometric Consistency for Large Scale Image Search. In Proceedings of the European Conference on Computer Vision (ECCV), Marseille, France, 12–18 October 2008; pp. 304–317. [Google Scholar]
- Gordo, A.; Almazán, J.; Revaud, J.; Larlus, D. Deep Image Retrieval: Learning Global Representations for Image Search. In Proceedings of the European Conference on Computer Vision (ECCV), Amsterdam, The Netherlands, 11–14 October 2016; pp. 241–257. [Google Scholar]
- Gordo, A.; Almazan, J.; Revaud, J.; Larlus, D. End-to-end Learning of Deep Visual Representations for Image Retrieval. Int. J. Comput. Vis. 2017, 124, 237–254. [Google Scholar] [CrossRef]
- Nguyen, N.B.; Nguyen, K.M.; Van, C.M.; Le, D.D. Graph-based visual instance mining with geometric matching and nearest candidates selection. In Proceedings of the International Conference on Knowledge and Systems Engineering (KSE), Hue, Vietnam, 19–21 October 2017; pp. 263–268. [Google Scholar]
- Park, C.S.; Choeh, J.Y. Fast and robust copy-move forgery detection based on scale-space representation. Multimed. Tools Appl. 2018, 77, 16795–16811. [Google Scholar] [CrossRef]
- Amerini, I.; Ballan, L.; Caldelli, R.; Del Bimbo, A.; Serra, G. A SIFT-Based Forensic Method for Copy–Move Attack Detection and Transformation Recovery. IEEE Trans. Inf. Forensic Secur. 2011, 6, 1099–1110. [Google Scholar] [CrossRef]
- Zheng, L.; Wang, S.; Liu, Z.; Tian, Q. Packing and Padding: Coupled Multi-index for Accurate Image Retrieval. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Columbus, OH, USA, 23–28 June 2014; pp. 1939–1946. [Google Scholar]
- Zhou, W.; Li, H.; Hong, R.; Lu, Y.; Tian, Q. BSIFT: Toward Data-Independent Codebook for Large Scale Image Search. IEEE Trans. Image Process. 2015, 24, 967–979. [Google Scholar] [CrossRef] [PubMed]
- Sattler, T.; Havlena, M.; Schindler, K.; Pollefeys, M. Large-Scale Location Recognition and the Geometric Burstiness Problem. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 27–30 June 2016; pp. 1582–1590. [Google Scholar]
- Tolias, G.; Avrithis, Y.; Jégou, H. To Aggregate or Not to aggregate: Selective Match Kernels for Image Search. In Proceedings of the IEEE International Conference on Computer Vision (ICCV), Sydney, Australia, 1–8 December 2013; pp. 1401–1408. [Google Scholar]
- Arandjelović, R.; Zisserman, A. DisLocation: Scalable Descriptor Distinctiveness for Location Recognition. In Proceedings of the Asian Conference on Computer Vision (ACCV), Singapore, 1–5 November 2014; pp. 188–204. [Google Scholar]
- Jégou, H.; Douze, M.; Schmid, C. On the burstiness of visual elements. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Miami, FL, USA, 20–25 June 2009; pp. 1169–1176. [Google Scholar]
- Robertson, S. Understanding inverse document frequency: On theoretical arguments for IDF. J. Doc. 2004, 60, 503–520. [Google Scholar] [CrossRef]
- Dong, J.; Wang, W.; Tan, T. CASIA Image Tampering Detection Evaluation Database. In Proceedings of the IEEE China Summit & International Conference on Signal and Information Processing (ChinaSIP), Beijing, China, 6–10 July 2013; pp. 422–426. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| N | |||||
| 4 | 0 | 1.4 | 1.25 | 1.2 | 1.15 |
| 6.4 | 6.5 | 11.5 | 18.5 | 30.5 | 1000.5 |
| Query Region | Features | |||||
|---|---|---|---|---|---|---|
| Foreground (Spliced region) | Zernike | 172 | 183 | 201 | 203 | 76.44% |
| SIFT | 134 | 170 | 184 | 189 | 59.56% | |
| Hybrid | 191 | 200 | 213 | 218 | 84.89% | |
| Background | Zernike | 222 | 225 | 225 | 225 | 98.67% |
| SIFT | 221 | 223 | 225 | 225 | 98.22% | |
| Hybrid | 225 | 225 | 225 | 225 | 100% |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pham, N.T.; Lee, J.-W.; Kwon, G.-R.; Park, C.-S. Hybrid Image-Retrieval Method for Image-Splicing Validation. Symmetry 2019, 11, 83. https://doi.org/10.3390/sym11010083
Pham NT, Lee J-W, Kwon G-R, Park C-S. Hybrid Image-Retrieval Method for Image-Splicing Validation. Symmetry. 2019; 11(1):83. https://doi.org/10.3390/sym11010083
Chicago/Turabian StylePham, Nam Thanh, Jong-Weon Lee, Goo-Rak Kwon, and Chun-Su Park. 2019. "Hybrid Image-Retrieval Method for Image-Splicing Validation" Symmetry 11, no. 1: 83. https://doi.org/10.3390/sym11010083
APA StylePham, N. T., Lee, J.-W., Kwon, G.-R., & Park, C.-S. (2019). Hybrid Image-Retrieval Method for Image-Splicing Validation. Symmetry, 11(1), 83. https://doi.org/10.3390/sym11010083