Dynamic Modeling and Experiment Research on Twin Ball Screw Feed System Considering the Joint Stiffness


Abstract
1. Introduction
2. Dynamic Model of the TBS System
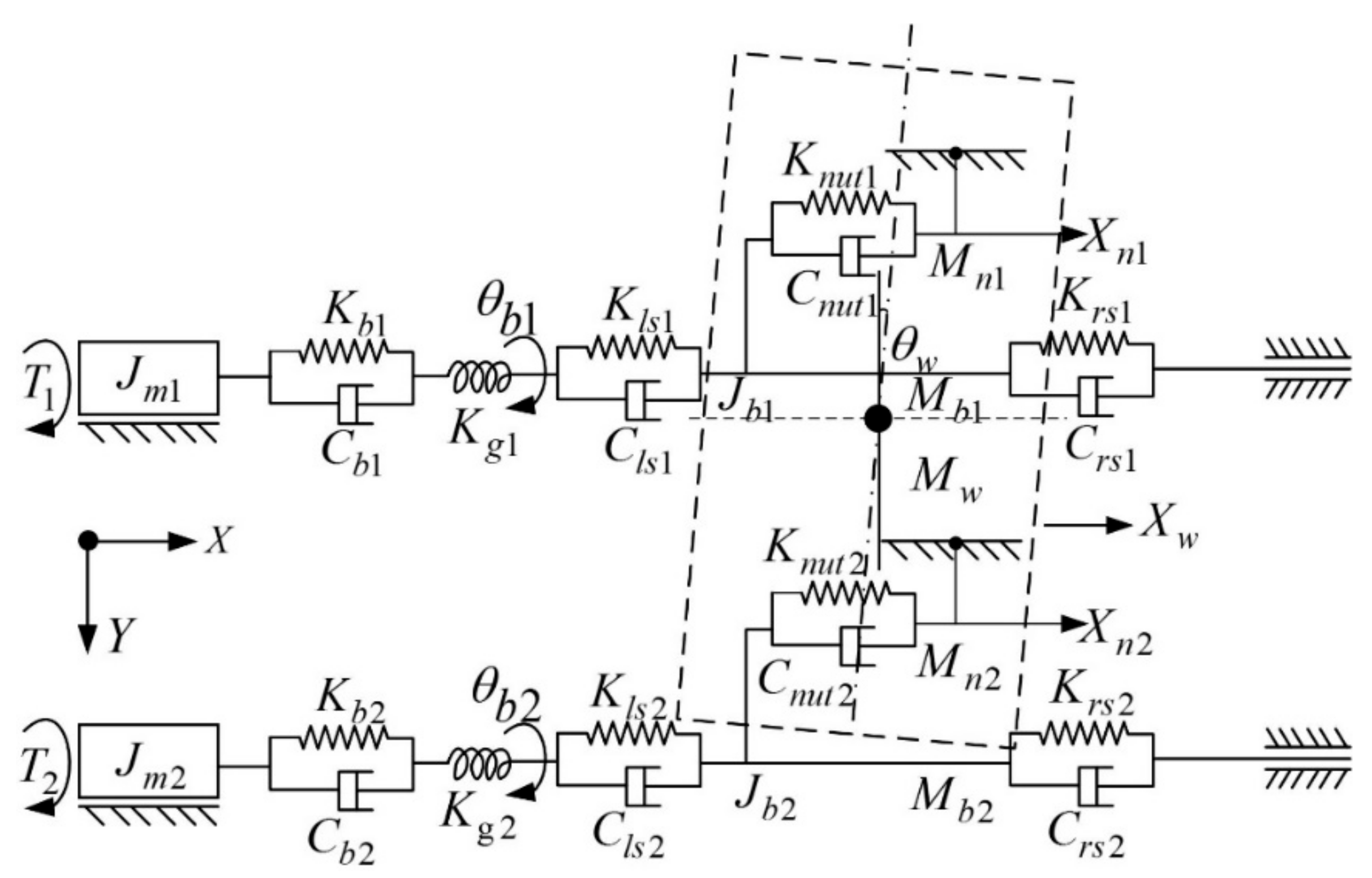
2.1. Dynamic Equivalent Model of the TBS System
2.2. Dynamic Modeling of the TBS System
3. Transmission Stiffness Modeling of the TBS System
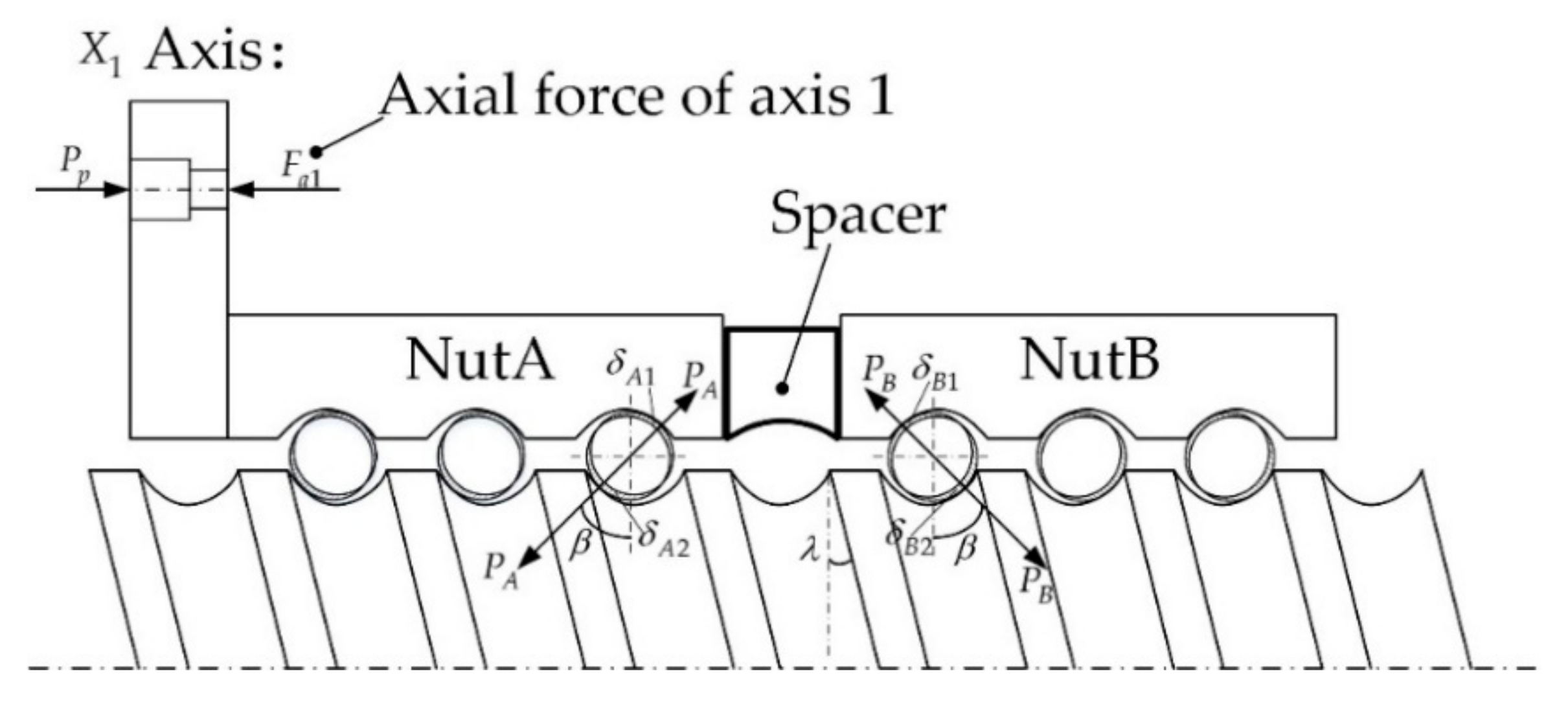
3.1. Calculating the Axial Stiffness of Screw-Nut Joints
3.1.1. Calculating the Stiffness of the Screw-Nut Joints
3.1.2. Calculating the Axial Stiffness of Screw-Nut Joints Caused by Friction Force
3.1.3. Calculating the Axial Stiffness of the Bearing Joints
3.1.4. Calculating the Transmission Stiffness of the Overall TBS System
4. FE Analysis of the TBS Worktable
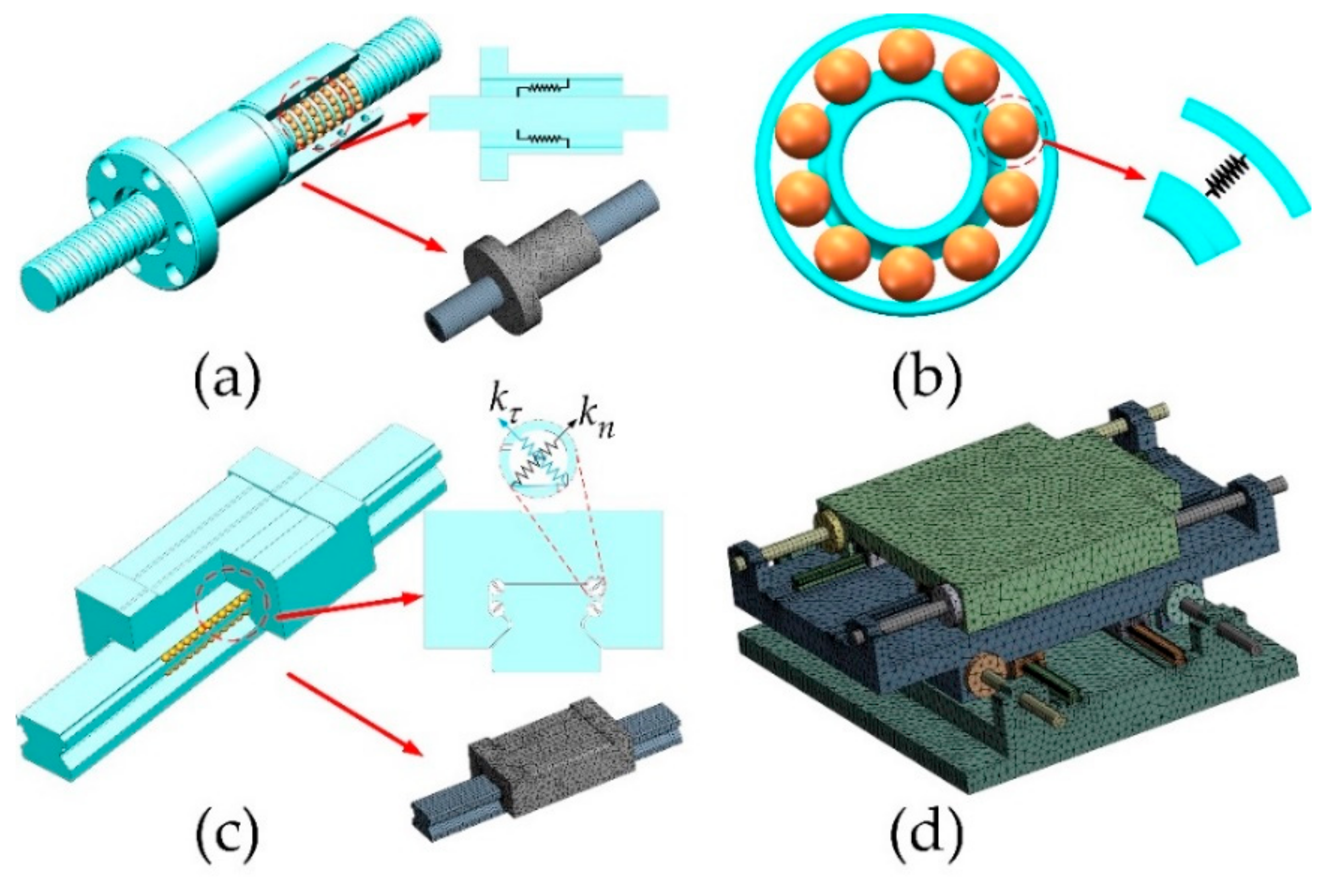
4.1. Modeling of the FEM
4.1.1. FEM of the Screw-Nut Joints
4.1.2. FEM of the Bearing Joints
4.1.3. FEM of the Guide-Slider Joints
4.1.4. FEM of the TBS Worktable
4.2. Finite Element Analysis of the TBS Worktable
5. Dynamic Experiments
5.1. The Dynamic Characteristics of the Worktable at Different Positions
5.2. The Dynamic Characteristics of the Worktable at Different Velocities
6. Conclusions
- The lumped mass method and FE method were employed to establish the dynamic model of the TBS feed system considering the stiffness of screw-nut and bearing joints, and to build the stiffness model of the transmission chain. Furthermore, the calculation formulas of the static overall stiffness of the two-dimensional TBS system were deduced. It also gives the mapping relation between the overall stiffness and the position of the nut in the X and Y direction.
- The equivalent stiffness model of the joints is established by using Hertz contact theory, and the stiffness of the screw-nut joints, bearing joints and guide-slider joints were calculated by it. Then, the calculation results of the joints’ stiffness were applied to the FEM. Compared with theoretical calculation and FE analysis, the maximum error is up to 19.2% because the stiffness of the fixed joints was neglected.
- The dynamic characteristics of the worktable at different positions were studied, and the maximum error of the nature frequency of the system was 11.1%. Thus, the correctness of the theoretical model is verified by experiments. The overall stiffness of the TBS system decreases with the increase of the nut positions of X and Y direction. In actual machining process, the furthermost right side of the worktable should be avoided.
- The dynamic characteristics of the worktable at different velocities are studied. Due to the friction force variations with the velocities, a friction model was proposed, and the parameters of the model were obtained through nonlinear system identification. The experiment showed that the maximum critical speed of the system is 35 m/min. When the velocity exceeds it, , the bearing will fail. When the velocity is 30 m/min, the stiffness of the bearing is minimum and the same as the overall TBS system. By comparing Figure 10 and Figure 13, it shows the dynamic nature frequency is larger than the static nature frequency.
Author Contributions
Funding
Conflicts of Interest
References
- Hsieh, M.F.; Yao, W.S.; Chiang, C.R. Modeling and synchronous control of a single-axis stage driven by dual mechanically-coupled parallel ball screws. Int. J. Adv. Manuf. Technol. 2007, 34, 933–943. [Google Scholar] [CrossRef]
- Altintas, Y.; Verl, A.; Brecher, C. Machine tool feed drives. CIRP Ann.-Manuf. Technol. 2011, 60, 779–796. [Google Scholar] [CrossRef]
- Li, F.; Jiang, Y.; Li, T. An improved dynamic model of preloaded ball screw drives considering torque transmission and its application to frequency analysis. J. Adv. Mech. Eng. 2017, 9. [Google Scholar] [CrossRef]
- Zhang, H. Dynamic analysis of the machine drive system. J. Mech. Sci. Technol. 2015, 29, 5205–5215. [Google Scholar] [CrossRef]
- Mi, L.; Sun, M.N.; Wang, X.H. Effects of preloads on joints on dynamic stiffness of a whole machine tool structure. J. Mech. Sci. Technol. 2012, 26, 495–508. [Google Scholar] [CrossRef]
- Hung, J.P. Load effect on the vibration characteristics of a stage with rolling guides. J. Mech. Sci. Technol. 2009, 23, 89–99. [Google Scholar] [CrossRef]
- García-Herreros, I.; Kestelyn, X.; Gomand, J. Model-based decoupling control method for dual-drive gantry stages: A case study with experimental validations. Contr. Eng. Pract. 2013, 21, 298–307. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, J.; Zhao, T. Stiffness model for a ball screw drive system. J. Tsinghua Univ. 2011, 51, 601–606. [Google Scholar]
- John, E.H.; Peter, P.G. Mechanical testing machine stiffness: Part I—Theory and calculations. Int. J. Adv. Manuf. Technol. 1971, 13, 251–264. [Google Scholar]
- Li, Y.X.; Zhao, W.H.; Cheng, Y. Synchronous Control System Modeling of Gantry-Type Machine Tools. J Xi’an Jiao Tong Univ. 2012, 46, 119–124. [Google Scholar]
- Cheng, Y.; Liang, T.; Zhao, W.H. Non-synchronous Error and Modeling of Dual-drive System in Gantry-type Machine Tools with Travelling Bridge. J. Mech. Eng. 2013, 49, 174–182. [Google Scholar] [CrossRef]
- Xie, L.M.; Yang, X.Y. Non-synchronous error analysis of dual-driving feed system considering the change of the center of gravity of the load. Mod. Manuf. Eng. 2016, 1, 82–87. [Google Scholar]
- Wang, R.C. Research on Performance Analysis and Test of Twin Ball Screw Feed Machine Tool for Structural Dynamic Error. Ph.D. Thesis, Tsinghua University, Beijing, China, 2013. [Google Scholar]
- Zhu, J.M.; Zhang, T.C.; Wang, J. Axial dynamic characteristic parameters identification of rolling joints in a ball screw feed drive system. Proc IMechE, Part C J. Eng. Manuf. 2015, 220, 203–210. [Google Scholar] [CrossRef]
- Wang, D.Z.; Lu, Y.; Zhang, T.C. Effect of Stiffness of Rolling Joints on the Dynamic Characteristic of Ball Screw Feed Systems in a Milling Machine. Shock Vib. 2015, 2015, 1–11. [Google Scholar] [CrossRef]
- Zhang, H.J.; Zhang, J.; Liu, H. Dynamic modeling and analysis of the high-speed ball screw feed system. Proc. IMechE Part B J. En. Manuf. 2014, 229. [Google Scholar] [CrossRef]
- Chen, Y.; Tang, W. Determination of contact stiffness in ball screws considering variable contact angles. Proc. IMechE Part C J. Eng. Manuf. 2015, 228, 2193–2203. [Google Scholar] [CrossRef]
- Zhu, J.M.; Zhang, T.C.; Li, X.R. Dynamic Characteristic Analysis of Ball Screw Feed System Based on Stiffness Characteristic of Mechanical Joints. J. Mech. Eng. 2015, 2015, 51–17. [Google Scholar] [CrossRef]
- Yao, W.S.; Yang, F.Y.; Tsai, M.C. Modeling and Control of Twin Parallel-Axis Linear Servo Mechanisms for High-Speed Machine Tools. Int. J. Auto Smart Technol. 2011, 1, 77–85. [Google Scholar] [CrossRef]
- Altintas, Y.; Brecher, C.; Weck, M. Virtual Machine Tool. CIRP Ann. Manuf. Technol. 2005, 54, 115–138. [Google Scholar] [CrossRef]
- Brussel, H.V.; Sas, P.; Nemeth, I. Towards a mechatronic compiler. IEEE/ASME Trans. Mechatron. 2001, 6, 90–105. [Google Scholar] [CrossRef]
- Erkorkmaz, K.; Kamalzadeh, A. High bandwidth control of ball screw drives. CIRP Ann. Manuf. Technol. 2006, 55, 393–398. [Google Scholar] [CrossRef]
- Montgomery-Smith, S.; Huang, W. A Numerical Method to Model Dynamic Behavior of Thin Inextensible Elastic Rods in Three Dimensions. ASME J. Comput. Nonlinear Dyn. 2014, 9, 011015. [Google Scholar] [CrossRef]
- Fan, W.; Lu, H.; Zhang, X.B. Two-Degree-Of-Freedom Dynamic Model-Based Terminal Sliding Mode Control with Observer for Dual-Driving Feed Stage. Symmetry 2018, 10, 488. [Google Scholar] [CrossRef]
- Wang, N.G.; Cao, G.H. Modeling and Control for a Multi-Rope Parallel Suspension Lifting System under Spatial Distributed Tensions and Multiple Constraints. Symmetry 2018, 10, 412. [Google Scholar] [CrossRef]
- Peasgood, M.; Kubica, E.; McPhee, J. Stabilization of a Dynamic Walking Gait Simulation. ASME J. Comput. Nonlinear Dyn. 2007, 2, 65–72. [Google Scholar] [CrossRef]
- Kong, F.; Huang, W.; Jiang, Y. A Vibration Model of Ball Bearings with a Localized Defect Based on the Hertzian Contact Stress Distribution. Shock Vib. 2018, 2018, 1–14. [Google Scholar] [CrossRef]
- Cheng, G.R.; Shi, Z.K.; Zhang, C.P. Design Basis of Ball Screw Transmission; Machinery Industry Press: Beijing, China, 1987; pp. 79–80. [Google Scholar]
- Canudas, W.C.; Olsson, H.; Astrom, K.J. A new model for control of systems with friction. IEEE Trans. Automat. Contr. 1995, 40, 419–425. [Google Scholar] [CrossRef]
- Olvera, D.; Lacalle, L.N.L.D.; Fz-Valdivielso, A. Analysis of the tool tip radial stiffness of turn-milling centers. Int. J. Adv. Manuf. Technol. 2012, 60, 883–891. [Google Scholar] [CrossRef]
- Ball Screws’ Technical Information of HIWIN; Hiwin Technologies Corp.: Taichung, Taiwan, 2013.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Num. of Bearing Balls | Ball Diameter | Contact Angle | Preload | Helix Angle | Crowns | Nominal Diameter |
|---|---|---|---|---|---|---|
| 98 | 3.175 | 45 | 1.115 | 4.5499 | 0.52 | 20 |
| Coefficient | ||||||||
|---|---|---|---|---|---|---|---|---|
| Axis 1 | Axis 2 | Axis 1 | Axis 2 | Axis 1 | Axis 2 | Axis 1 | Axis 2 | |
| Value | 280.90 | 431.40 | 425.80 | 1225.00 | 3.49 | 5.10 | 0.42 | 0.30 |
| Num. of Bearing Balls Z | ||||
|---|---|---|---|---|
| 10 | 6.6 | 40 | 1.0 | 0.52 |
| Parameters | Given Value |
|---|---|
| : worktable mass | 24.43 kg |
| , : nut 1 and nut 2 mass | 0.575 kg |
| p: the lead of the ball screw | 5 × 10−3 m |
| , : inertial moment of the motor 1 and 2 | 1.76 × 10−4 kgm2 |
| , : inertial moment of the ball screw 1 and 2 | 7.85 × 10−5 kgm2 |
| : inertial moment of the worktable | 0.505 kgm2 |
| : axial displacement of the nut 1 | state variable |
| : axial displacement of the nut 2 | state variable |
| : displacement of the worktable | state variable |
| : rotating angle of the screw 1 | state variable |
| : rotating angle of the screw 2 | state variable |
| : twist angle of the worktable | state variable |
| Error % | Error % | ||||
|---|---|---|---|---|---|
| 0 | 51.4 | 49.7 | 3.4 | 58.4 | 17.5 |
| 0.25 | 50.9 | 48.3 | 5.4 | 57.6 | 19.2 |
| 0.5 | 50.3 | 47.6 | 5.7 | 56.0 | 17.6 |
| 0.75 | 49.7 | 45.1 | 10.2 | 53.2 | 17.9 |
| 1 | 48.9 | 44.0 | 11.1 | 50.1 | 13.8 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Duan, M.; Lu, H.; Zhang, X.; Zhang, Y.; Li, Z.; Liu, Q. Dynamic Modeling and Experiment Research on Twin Ball Screw Feed System Considering the Joint Stiffness. Symmetry 2018, 10, 686. https://doi.org/10.3390/sym10120686
Duan M, Lu H, Zhang X, Zhang Y, Li Z, Liu Q. Dynamic Modeling and Experiment Research on Twin Ball Screw Feed System Considering the Joint Stiffness. Symmetry. 2018; 10(12):686. https://doi.org/10.3390/sym10120686
Chicago/Turabian StyleDuan, Meng, Hong Lu, Xinbao Zhang, Yongquan Zhang, Zhangjie Li, and Qi Liu. 2018. "Dynamic Modeling and Experiment Research on Twin Ball Screw Feed System Considering the Joint Stiffness" Symmetry 10, no. 12: 686. https://doi.org/10.3390/sym10120686
APA StyleDuan, M., Lu, H., Zhang, X., Zhang, Y., Li, Z., & Liu, Q. (2018). Dynamic Modeling and Experiment Research on Twin Ball Screw Feed System Considering the Joint Stiffness. Symmetry, 10(12), 686. https://doi.org/10.3390/sym10120686