Modeling Geospatial Distribution of Peat Layer Thickness Using Machine Learning and Aerial Laser Scanning Data


Abstract
1. Introduction
2. Materials and Methods
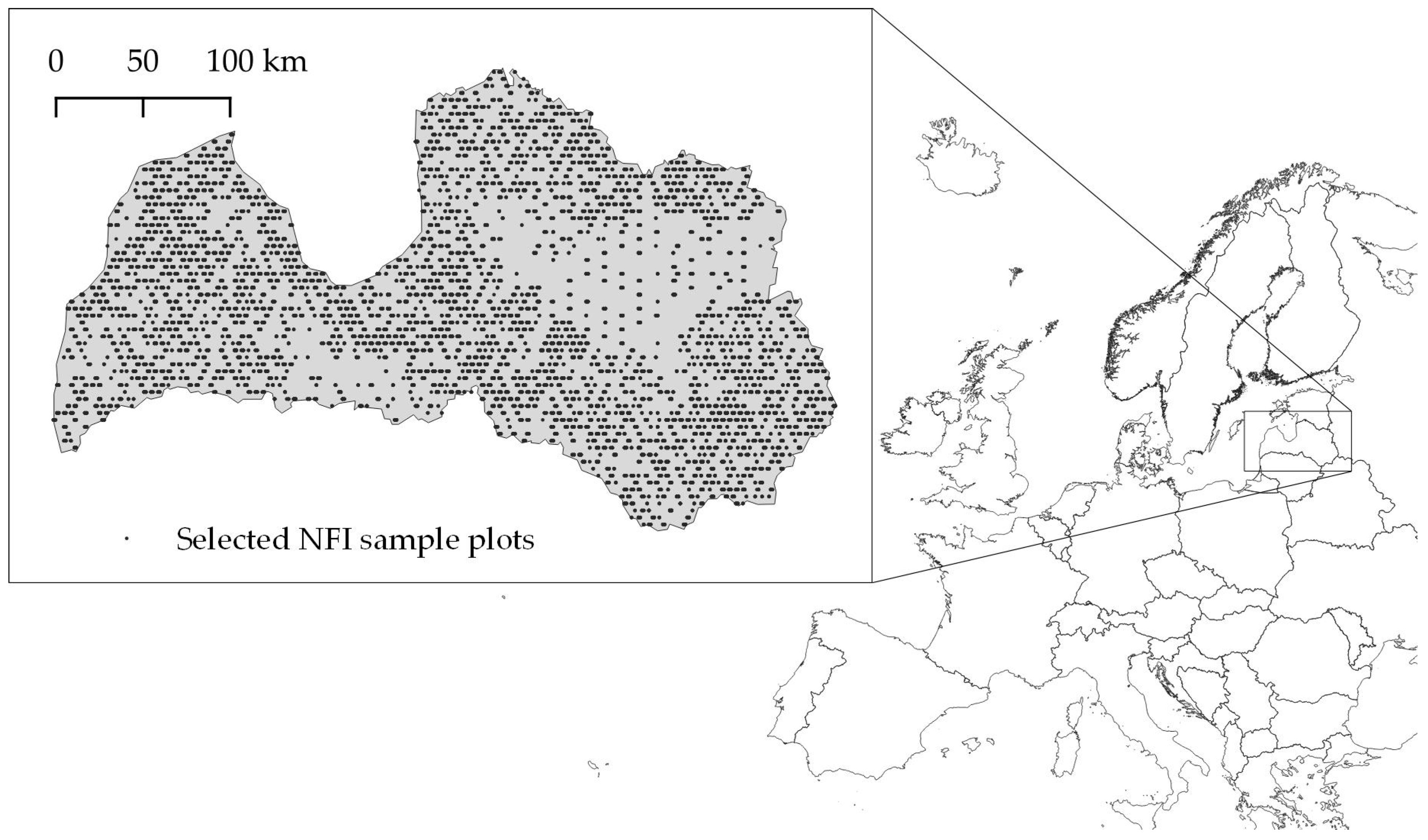
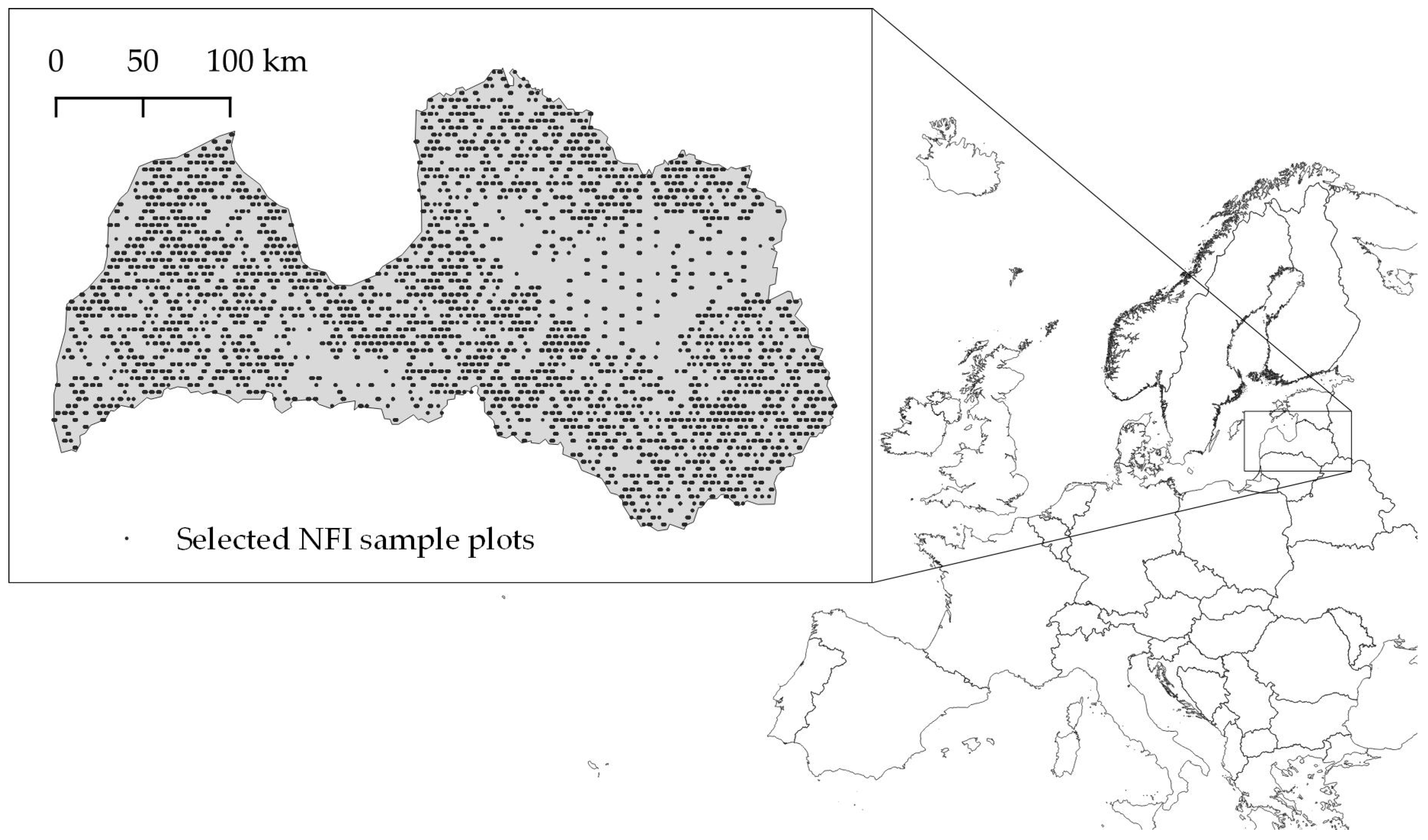
2.1. Study Site
2.2. Field Data
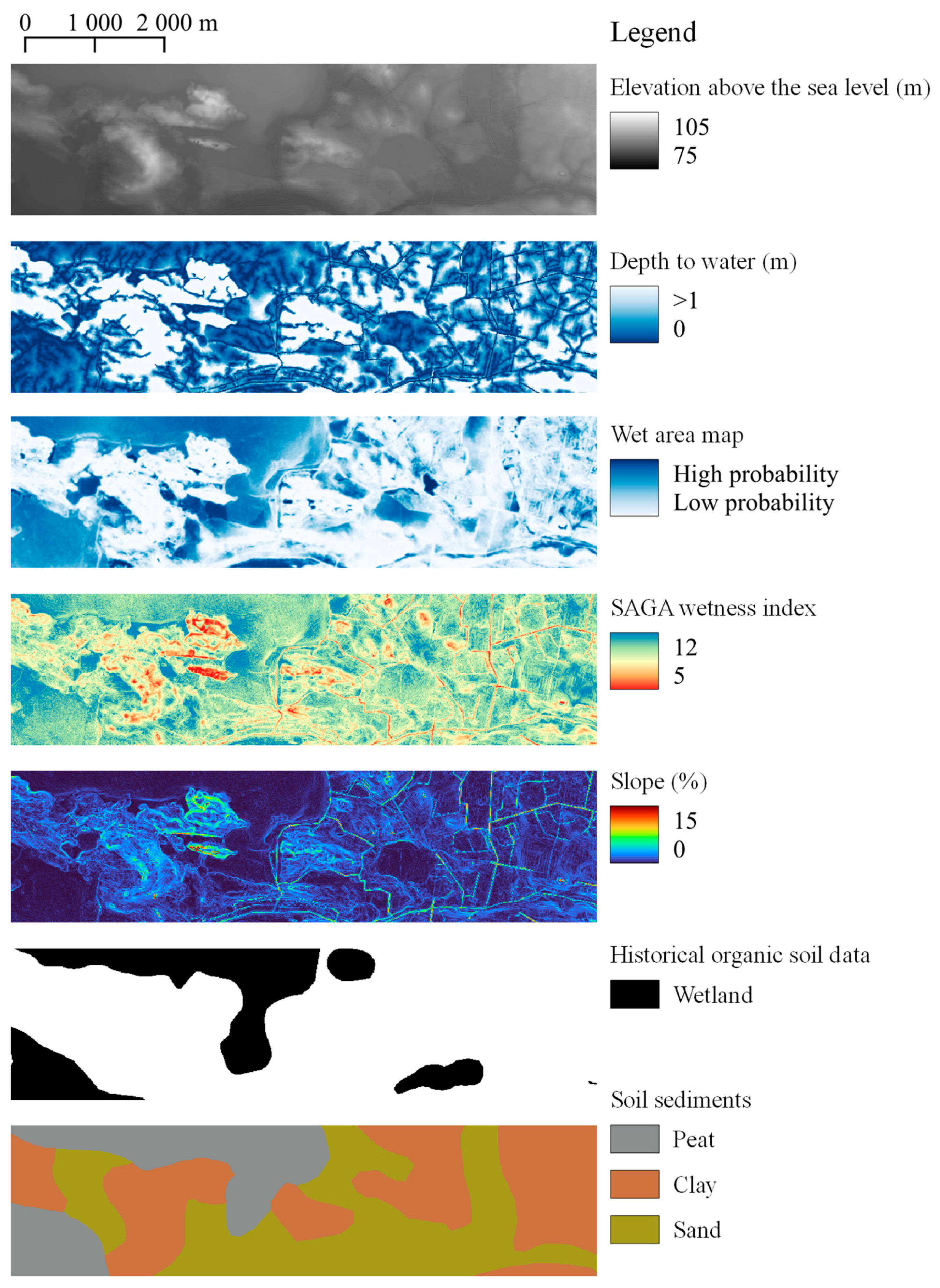
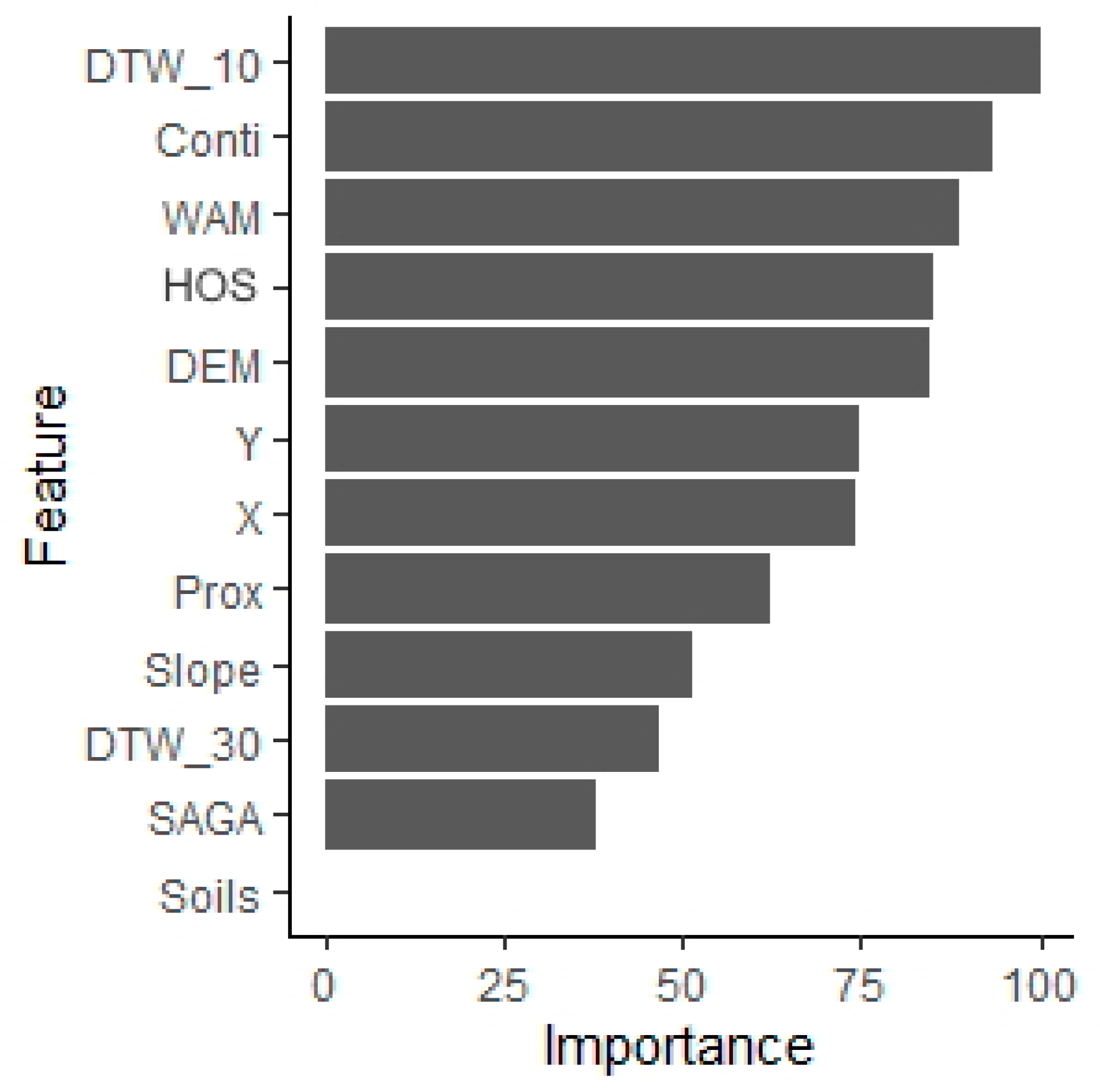
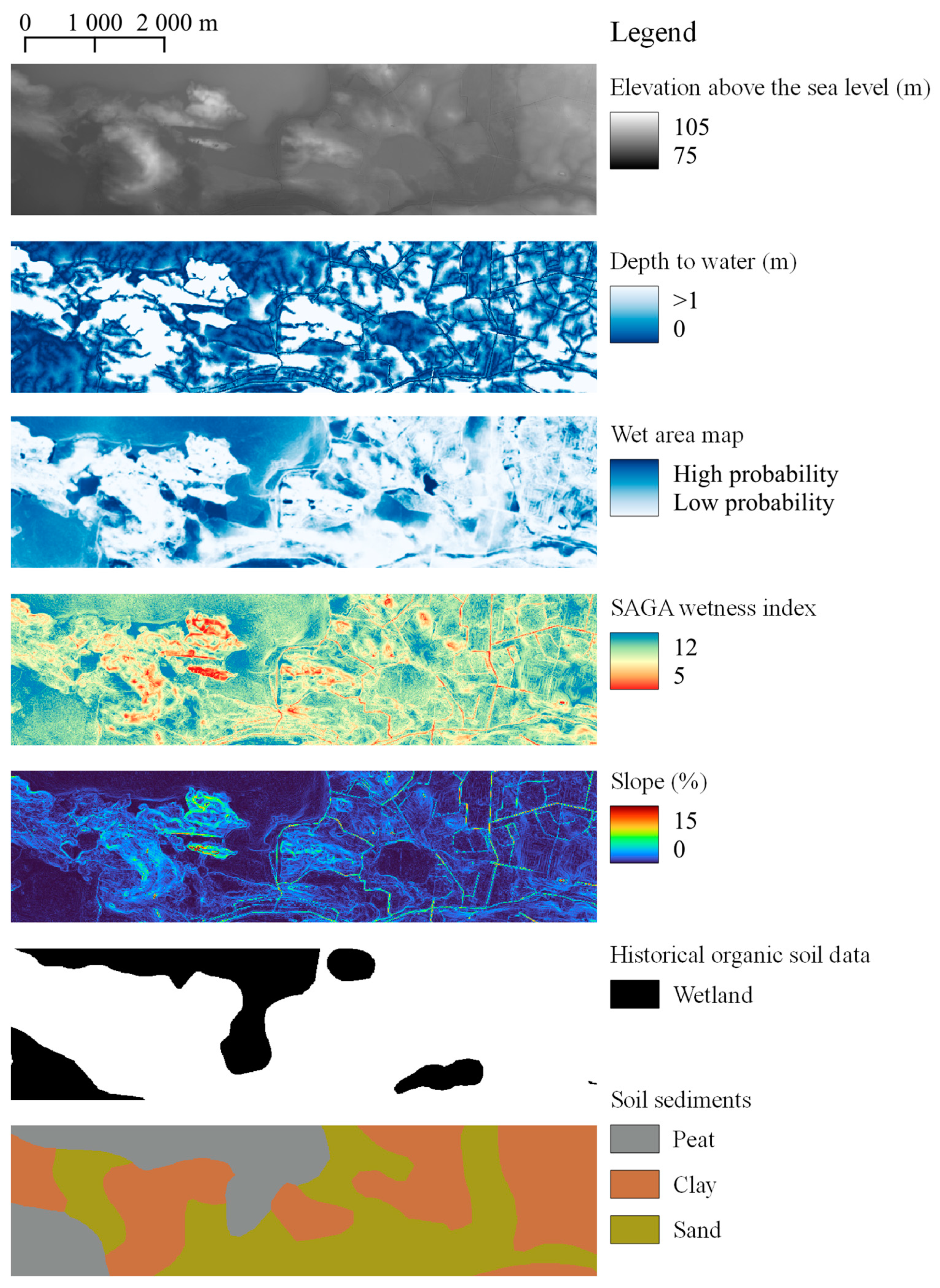
2.3. Variables Derived from ALS Data and Other Cartographic Materials
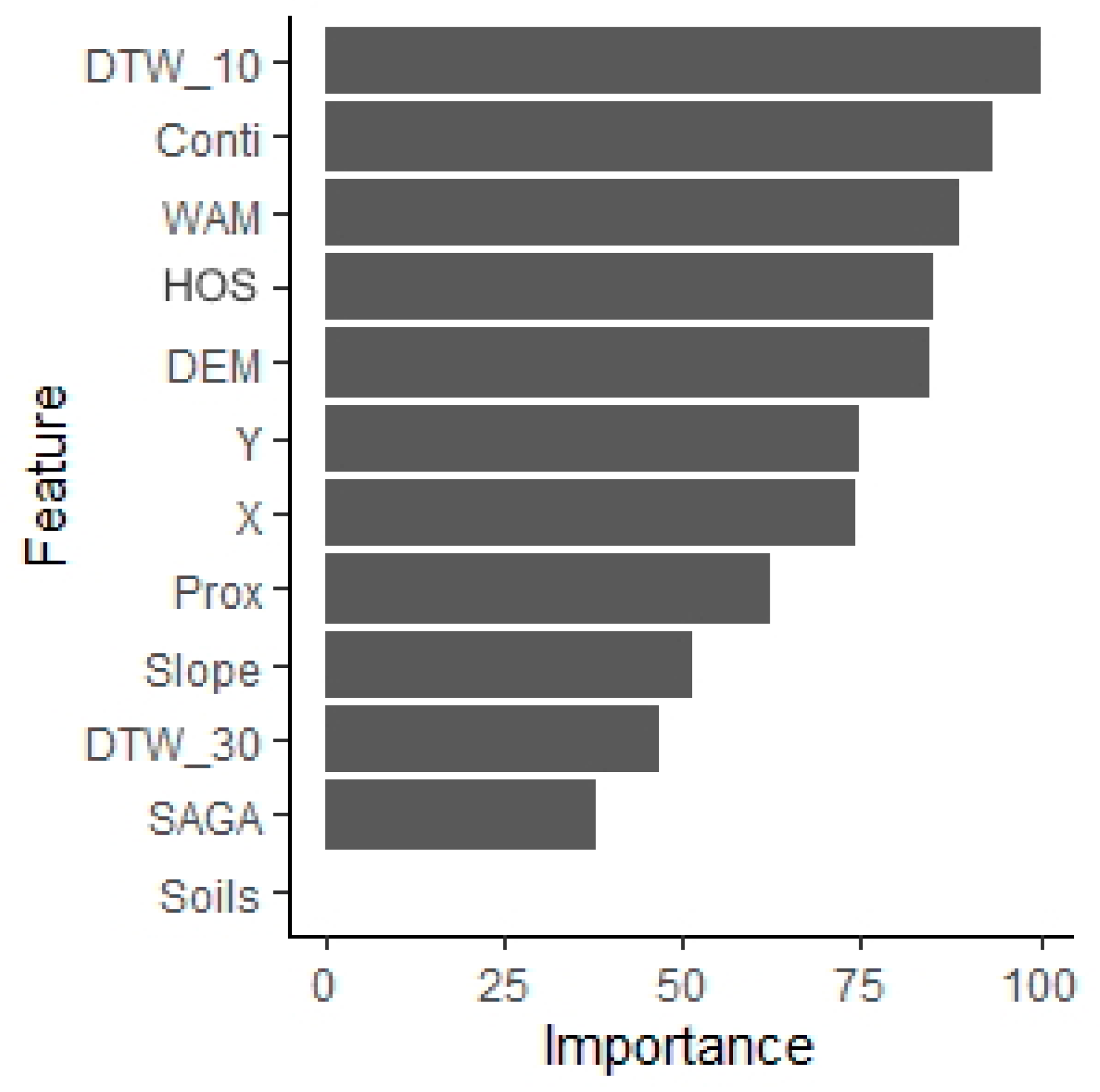
- Digital elevation model (DEM)
- Depth to water (DTW_10 and DTW_30)
- Wet area maps (WAM)
- SAGA Wetness index (SAGA_TWI)
- Slope
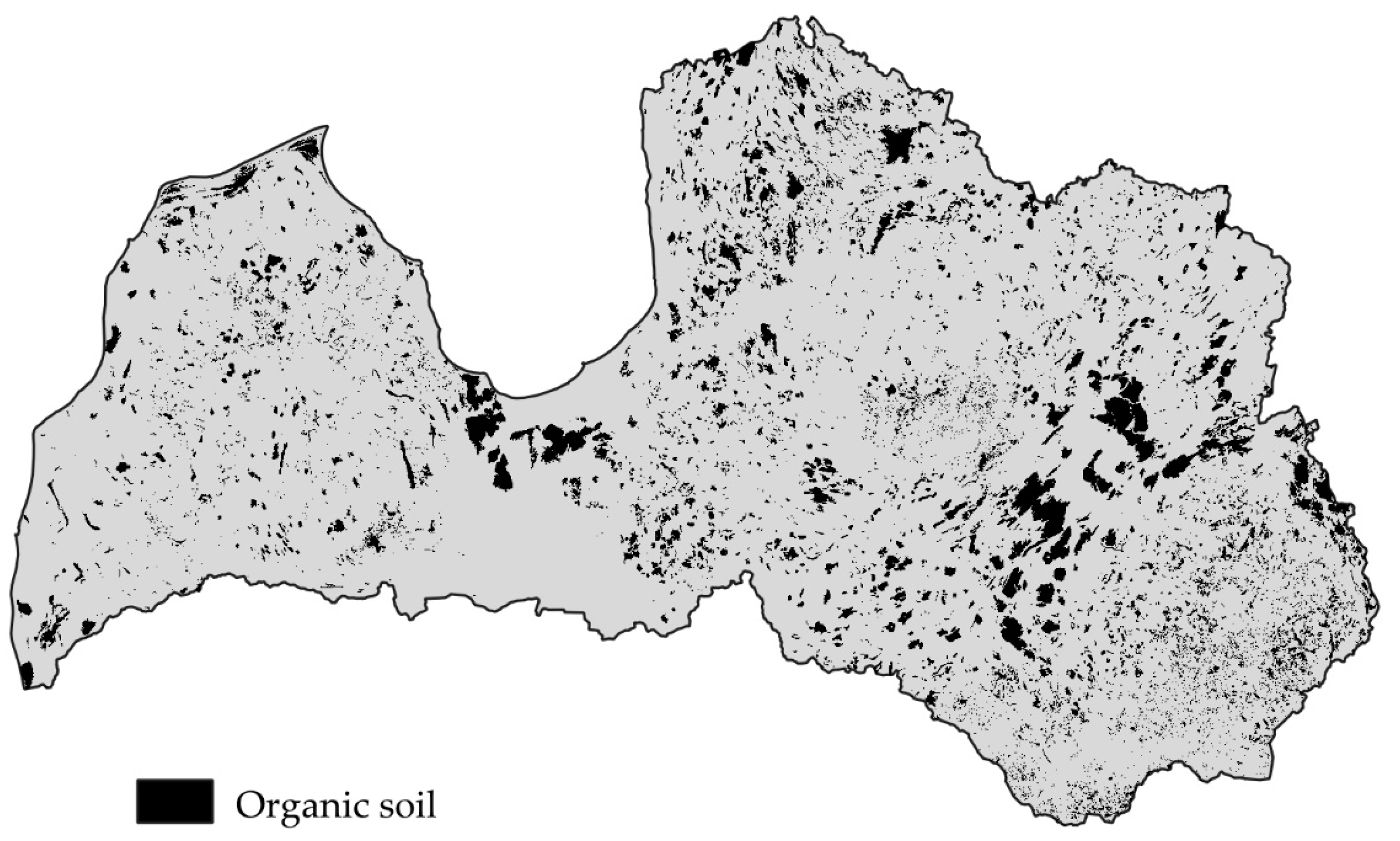
- Historical organic soil data (HOS)
- Soil data
- Proximity to water
- Continentality, X and Y coordinates
2.4. Machine Learning Classification of Peat Layer Thickness
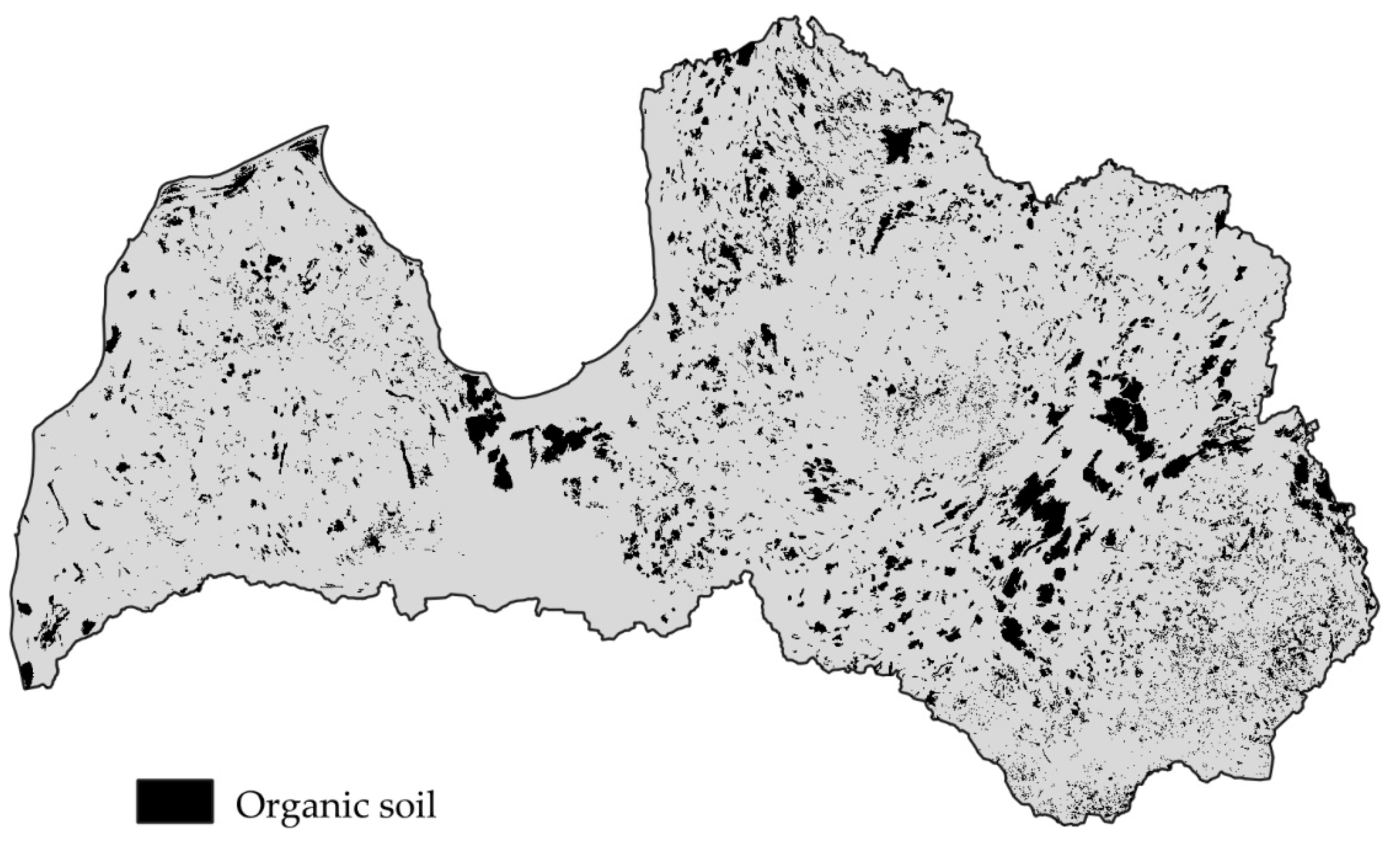
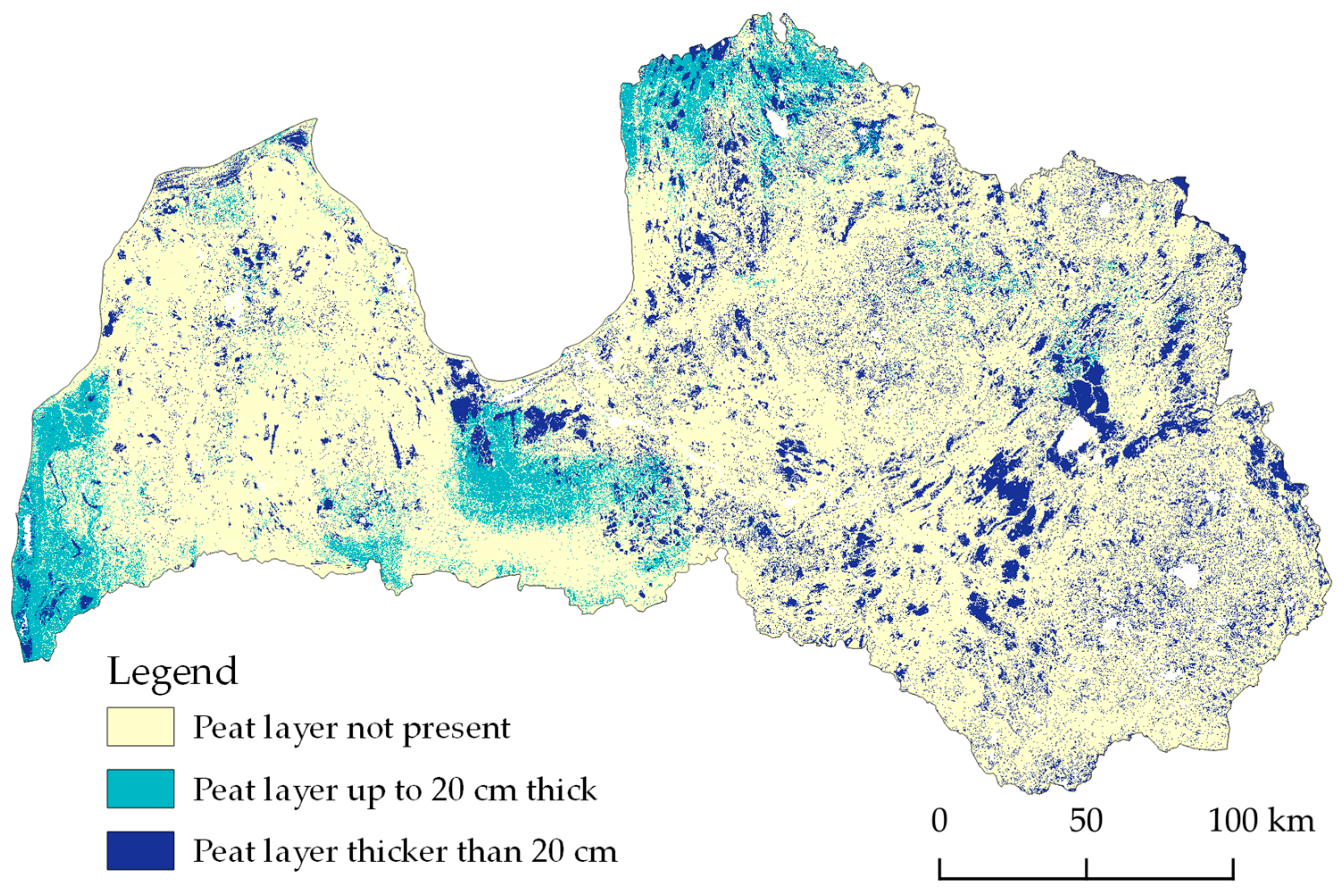
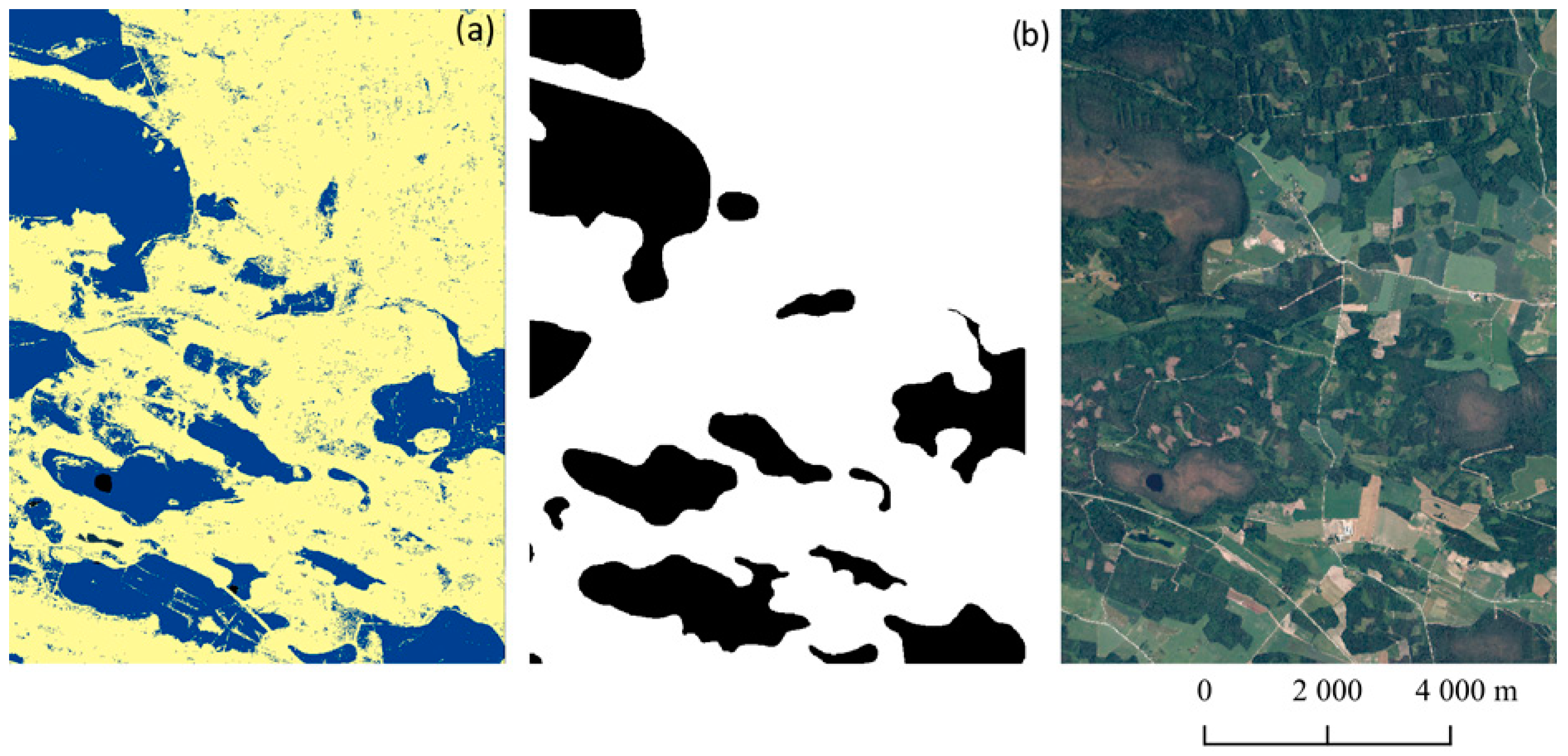
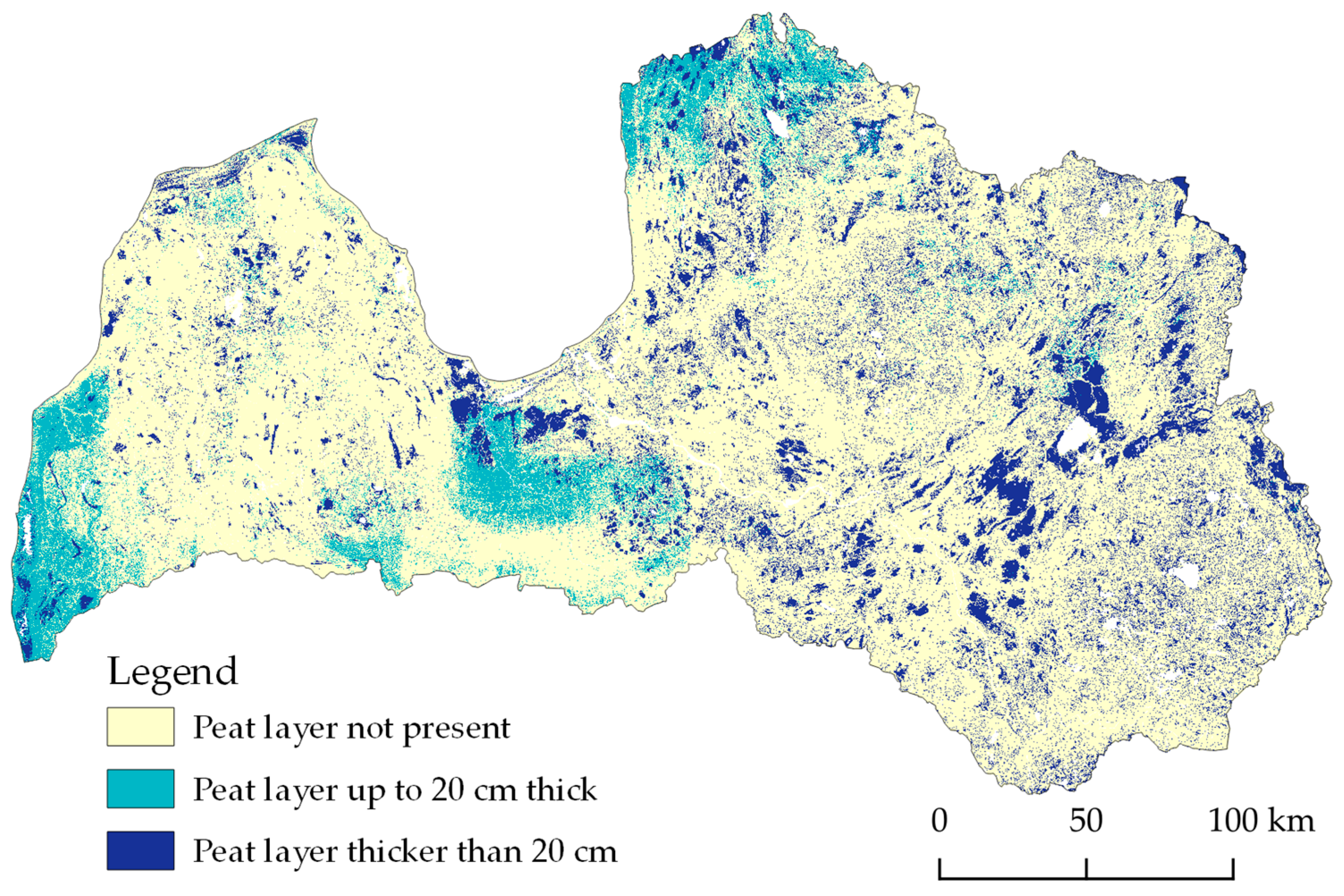
3. Results
- Soils without organic horizon—0.95 (sensitivity), 0.80 (specificity);
- Soils with peat layer up to 20 cm—0.62 (sensitivity), 0.97 (specificity);
- Soils with peat layer thicker than 20 cm—0.82 (sensitivity), 0.96 (specificity).
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Minasny, B.; Berglund, Ö.; Connolly, J.; Hedley, C.; de Vries, F.; Gimona, A.; Kempen, B.; Kidd, D.; Lilja, H.; Malone, B.; et al. Digital Mapping of Peatlands—A Critical Review. Earth-Sci. Rev. 2019, 196, 102870. [Google Scholar] [CrossRef]
- IPCC. 2013 Supplement to the 2006 IPCC Guidelines for National Greenhouse Gas Inventories: Wetlands; Hiraishi, T., Krug, T., Tanabe, K., Srivastava, N., Baasansuren, J., Fukuda, M., Troxler, T.G., Eds.; IPCC: Geneva, Switzerland, 2014; ISBN 978-92-9169-139-5. [Google Scholar]
- Couwenberg, J. Greenhouse Gas Emissions from Managed Peat Soils: Is the IPCC Reporting Guidance Realistic? Mires Peat 2011, 8, 2. [Google Scholar]
- Kurz, W.A.; Shaw, C.H.; Boisvenue, C.; Stinson, G.; Metsaranta, J.; Leckie, D.; Dyk, A.; Smyth, C.; Neilson, E.T. Carbon in Canada’s Boreal Forest-A Synthesis. Environ. Rev. 2013, 21, 260–292. [Google Scholar] [CrossRef]
- Beucher, A.; Koganti, T.; Iversen, B.V.; Greve, M.H. Mapping of Peat Thickness Using a Multi-Receiver Electromagnetic Induction Instrument. Remote Sens. 2020, 12, 2458. [Google Scholar] [CrossRef]
- Pouladi, N.; Møller, A.B.; Tabatabai, S.; Greve, M.H. Mapping Soil Organic Matter Contents at Field Level with Cubist, Random Forest and Kriging. Geoderma 2019, 342, 85–92. [Google Scholar] [CrossRef]
- Kalambukattu, J.G.; Kumar, S.; Arya Raj, R. Digital Soil Mapping in a Himalayan Watershed Using Remote Sensing and Terrain Parameters Employing Artificial Neural Network Model. Environ. Earth Sci. 2018, 77, 203. [Google Scholar] [CrossRef]
- Ramcharan, A.; Hengl, T.; Nauman, T.; Brungard, C.; Waltman, S.; Wills, S.; Thompson, J. Soil Property and Class Maps of the Conterminous United States at 100-Meter Spatial Resolution. Soil Sci. Soc. Am. J. 2018, 82, 186–201. [Google Scholar] [CrossRef]
- Hengl, T.; De Jesus, J.M.; Heuvelink, G.B.M.; Gonzalez, M.R.; Kilibarda, M.; Blagotić, A.; Shangguan, W.; Wright, M.N.; Geng, X.; Bauer-Marschallinger, B.; et al. SoilGrids250m: Global Gridded Soil Information Based on Machine Learning. PLoS ONE 2017, 12, e0169748. [Google Scholar] [CrossRef]
- Lacoste, M.; Minasny, B.; McBratney, A.; Michot, D.; Viaud, V.; Walter, C. High Resolution 3D Mapping of Soil Organic Carbon in a Heterogeneous Agricultural Landscape. Geoderma 2014, 213, 296–311. [Google Scholar] [CrossRef]
- Cahyono, B.K.; Aditya, T. Istarno The Least Square Adjustment for Estimating the Tropical Peat Depth Using LiDAR Data. Remote Sens. 2020, 12, 875. [Google Scholar] [CrossRef]
- Gatis, N.; Luscombe, D.J.; Carless, D.; Parry, L.E.; Fyfe, R.M.; Harrod, T.R.; Brazier, R.E.; Anderson, K. Mapping Upland Peat Depth Using Airborne Radiometric and Lidar Survey Data. Geoderma 2019, 335, 78–87. [Google Scholar] [CrossRef]
- Crooks, S.; Herr, D.; Tamelander, J.; Laffoley, D.; Vandever, J. Mitigating Climate Change through Restoration and Management of Coastal Wetlands and Near-Shore Marine Ecosystems: Challenges and Opportunities; World Bank: Washington, DC, USA, 2011. [Google Scholar]
- Anderson, R.L.; Foster, D.R.; Motzkin, G. Integrating Lateral Expansion into Models of Peatland Development in Temperate New England. J. Ecol. 2003, 91, 68–76. [Google Scholar] [CrossRef]
- Draveniece, A. Oceanic and Continental Air Masses over Latvia. Latvijas Veģetācija; Laivins, M., Ed.; SIA PIK: Riga, Latvia, 2007. [Google Scholar]
- Meirons, Z. Kvartāra Nogulumi. M.:1:200 000; Valsts Ģeoloģijas Dienests: Riga, Latvia, 2002. [Google Scholar]
- Piirimäe, K.; Salm, J.-O.; Ivanovs, J.; Stivrins, N.; Greimas, E.; Jarašius, L.; Zabeckis, N.; Haberl, A. Paludiculture in the Baltics-GIS Study, Project Assessment Report; Estonian Fund for Nature & Succow Foundation partner in the Greifswald Mire Centre, 2020; 48p, Available online: https://media.voog.com/0000/0037/1265/files/GIS_EE_LV_LT_04.2020.pdf (accessed on 2 February 2024).
- FAO. Peatland Mapping and Monitoring–Recommendations and Technical Overview; FAO: Rome, Italy, 2020. [Google Scholar]
- Murphy, P.N.C.; Ogilvie, J.; Castonguay, M.; Zhang, C.; Meng, F.-R.; Arp, P.A. Improving Forest Operations Planning through High-Resolution Flow-Channel and Wet-Areas Mapping. For. Chron. 2008, 84, 568–574. [Google Scholar] [CrossRef]
- Ivanovs, J.; Lupikis, A. Identification of Wet Areas in Forest Using Remote Sensing Data. Agron. Res. 2018, 16, 2049–2055. [Google Scholar] [CrossRef]
- Böhner, J.; Selige, T. Spatial Prediction of Soil Attributes Using Terrain Analysis and Climate Regionalisation. Gott. Geogr. Abh. 2006, 115, 13–28. [Google Scholar]
- Rudiyanto; Minasny, B.; Setiawan, B.I.; Arif, C.; Saptomo, S.K.; Chadirin, Y. Digital Mapping for Cost-Effective and Accurate Prediction of the Depth and Carbon Stocks in Indonesian Peatlands. Geoderma 2016, 272, 20–31. [Google Scholar] [CrossRef]
- Vasander, H.; Kettunen, A. Carbon in Boreal Peatlands. In Boreal Peatland Ecosystems; Kelman Wieder, R., Vitt, D.H., Eds.; Springer: Berlin/Heidelberg, Germany, 2006; Volume 188, pp. 165–194. ISBN 978-3-540-31912-2. [Google Scholar]
- Kuhn, M. Building Predictive Models in R Using the Caret Package. J. Stat. Softw. 2008, 28, 1–26. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. XGBoost: A Scalable Tree Boosting System. In Proceedings of the ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; Association for Computing Machinery: New York, NY, USA, 2016; pp. 785–794. [Google Scholar]
- Cordón, I.; García, S.; Fernández, A.; Herrera, F. Imbalance: Oversampling Algorithms for Imbalanced Classification in R. Knowl.-Based Syst. 2018, 15, 329–341. [Google Scholar] [CrossRef]
- Chawla, N.V.; Bowyer, K.W.; Hall, L.O.; Kegelmeyer, W.P. SMOTE: Synthetic Minority over-Sampling Technique. J. Artif. Intell. Res. 2002, 16, 321–357. [Google Scholar] [CrossRef]
- Ramezan, C.A.; Warner, T.A.; Maxwell, A.E. Evaluation of Sampling and Cross-Validation Tuning Strategies for Regional-Scale Machine Learning Classification. Remote Sens. 2019, 11, 185. [Google Scholar] [CrossRef]
- Cruickshank, M.M.; Tomlinson, R.W. Peatland in Northern Ireland: Inventory and Prospect. Irish Geogr. 1990, 23, 17–30. [Google Scholar] [CrossRef]
- Fuller, R.M.; Smith, G.M.; Sanderson, J.M.; Hill, R.A.; Thomson, A.G. The UK Land Cover Map 2000: Construction of a Parcel-Based Vector Map from Satellite Images. Cartogr. J. 2002, 39, 15–25. [Google Scholar] [CrossRef]
- Mulder, V.L.; Lacoste, M.; Richer-de-Forges, A.C.; Martin, M.P.; Arrouays, D. National versus Global Modelling the 3D Distribution of Soil Organic Carbon in Mainland France. Geoderma 2016, 263, 16–34. [Google Scholar] [CrossRef]
- Adhikari, K.; Hartemink, A.E.; Minasny, B.; Bou Kheir, R.; Greve, M.B.; Greve, M.H. Digital Mapping of Soil Organic Carbon Contents and Stocks in Denmark. PLoS ONE 2014, 9, e105519. [Google Scholar] [CrossRef] [PubMed]
- Rimondini, L.; Gumbricht, T.; Ahlström, A.; Hugelius, G. Mapping of Peatlands in the Forested Landscape of Sweden Using LiDAR-Based Terrain Indices. Earth Syst. Sci. Data Discuss. 2023, 15, 3473–3482. [Google Scholar] [CrossRef]
- Aitkenhead, M.J. Mapping Peat in Scotland with Remote Sensing and Site Characteristics. Eur. J. Soil Sci. 2017, 68, 28–38. [Google Scholar] [CrossRef]
- Thabtah, F.; Hammoud, S.; Kamalov, F.; Gonsalves, A. Data Imbalance in Classification: Experimental Evaluation. Inf. Sci. 2020, 513, 429–441. [Google Scholar] [CrossRef]
- Naboureh, A.; Li, A.; Bian, J.; Lei, G.; Amani, M. A Hybrid Data Balancing Method for Classification of Imbalanced Training Data within Google Earth Engine: Case Studies from Mountainous Regions. Remote Sens. 2020, 12, 3301. [Google Scholar] [CrossRef]
- Choi, H.S.; Jung, D.; Kim, S.; Yoon, S. Imbalanced Data Classification via Cooperative Interaction Between Classifier and Generator. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 3343–3356. [Google Scholar] [CrossRef]
- Wadoux, A.M.J.C.; Minasny, B.; McBratney, A.B. Machine Learning for Digital Soil Mapping: Applications, Challenges and Suggested Solutions. Earth-Sci. Rev. 2020, 210, 103359. [Google Scholar] [CrossRef]
- Klotz, M.; Kemper, T.; Geiß, C.; Esch, T.; Taubenböck, H. How Good Is the Map? A Multi-Scale Cross-Comparison Framework for Global Settlement Layers: Evidence from Central Europe. Remote Sens. Environ. 2016, 178, 191–212. [Google Scholar] [CrossRef]
- Kettridge, N.; Comas, X.; Baird, A.; Slater, L.; Strack, M.; Thompson, D.; Jol, H.; Binley, A. Ecohydrologically Important Subsurface Structures in Peatlands Revealed by Ground-Penetrating Radar and Complex Conductivity Surveys. J. Geophys. Res. Biogeosciences 2008, 113, 1–15. [Google Scholar] [CrossRef]
- Comas, X.; Slater, L.; Reeve, A. Geophysical Evidence for Peat Basin Morphology and Stratigraphic Controls on Vegetation Observed in a Northern Peatland. J. Hydrol. 2004, 295, 173–184. [Google Scholar] [CrossRef]
- Deragon, R.; Saurette, D.D.; Heung, B.; Caron, J. Mapping the Maximum Peat Thickness of Cultivated Organic Soils in the Southwest Plain of Montreal. Can. J. Soil Sci. 2023, 103, 103–120. [Google Scholar] [CrossRef]
- Günther, A.; Barthelmes, A.; Huth, V.; Joosten, H.; Jurasinski, G.; Koebsch, F.; Couwenberg, J. Prompt Rewetting of Drained Peatlands Reduces Climate Warming despite Methane Emissions. Nat. Commun. 2020, 11, 1644. [Google Scholar] [CrossRef]
- Joosten, H.; Clarke, D. Wise Use of Mires: Background and Principles Including a Framework for Decision-Making; International Mire Conservation Group/International Peat Society; Saarijärvsen Offset Oy: Saarijärvi, Finland, 2002; ISBN 951-97744-8-3. Available online: https://www.researchgate.net/publication/293563126_Wise_use_of_mires_Background_and_principles (accessed on 2 February 2024).
- United Nations Environment Programme UNEP. The Global Peatland Map 2.0. Online Resource. 2021. Available online: https://wedocs.unep.org/20.500.11822/37571 (accessed on 2 February 2024).
- Wichtmann, W.; Schröder, C.; Joosten, H. Paludiculture-Productive Use of Wet Peatlands; Schweizerbart Science Publishers: Stuttgart, Germany, 2016; ISBN 978-3-510-65283-9. [Google Scholar]
- Tanneberger, F.; Schröder, C.; Hohlbein, M.; Lenschow, U.; Permien, T.; Wichmann, S.; Wichtmann, W. Climate Change Mitigation through Land Use on Rewetted Peatlands—Cross-Sectoral Spatial Planning for Paludiculture in Northeast Germany. Wetlands 2020, 40, 2309–2320. [Google Scholar] [CrossRef]
- Abel, S.; Kallweit, T. Potential Paludiculture Plans of the Holarctic; Proceedings of the Greifswald Mire Centre 04/2022 (self-published, ISSN 2627-910X); Greifswald Mire Centre: Greifswald, Germany, 2022; Available online: https://greifswaldmoor.de/files/dokumente/GMC%20Schriften/2022_Abel%20&%20Kallweit_2022_DPPP_Holarctis.pdf (accessed on 2 February 2024).
- FNR. Project: Central Coordination of Model and Demonstration Projects for Peatland Protection Including the Use of Renewable Raw Materials from Paludiculture—Pooling of Data from Accompanying Scientific Studies. Original in German. Available online: https://www.fnr.de/projektfoerderung/ausgewaehlte-projekte/projekte/paludi-zentrale (accessed on 2 February 2024).
- Horizon Europe Framework Programme. Paludiculture: Large-Scale Demonstrations. Available online: https://ec.europa.eu/info/funding-tenders/opportunities/portal/screen/opportunities/topic-details/horizon-cl6-2024-climate-01-3 (accessed on 2 February 2024).

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Reference | |||
|---|---|---|---|
| Prediction | No Peat | Shallow Peat | Deep Peat |
| No peat | 3118 | 168 | 137 |
| Shallow peat | 76 | 354 | 36 |
| Deep peat | 88 | 52 | 796 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ivanovs, J.; Haberl, A.; Melniks, R. Modeling Geospatial Distribution of Peat Layer Thickness Using Machine Learning and Aerial Laser Scanning Data. Land 2024, 13, 466. https://doi.org/10.3390/land13040466
Ivanovs J, Haberl A, Melniks R. Modeling Geospatial Distribution of Peat Layer Thickness Using Machine Learning and Aerial Laser Scanning Data. Land. 2024; 13(4):466. https://doi.org/10.3390/land13040466
Chicago/Turabian StyleIvanovs, Janis, Andreas Haberl, and Raitis Melniks. 2024. "Modeling Geospatial Distribution of Peat Layer Thickness Using Machine Learning and Aerial Laser Scanning Data" Land 13, no. 4: 466. https://doi.org/10.3390/land13040466
APA StyleIvanovs, J., Haberl, A., & Melniks, R. (2024). Modeling Geospatial Distribution of Peat Layer Thickness Using Machine Learning and Aerial Laser Scanning Data. Land, 13(4), 466. https://doi.org/10.3390/land13040466