
Ensemble Machine-Learning-Based Framework for Estimating Surface Soil Moisture Using Sentinel-1/2 Data: A Case Study of an Arid Oasis in China

 ,
, 
Abstract
1. Introduction
2. Study Area and Data
2.1. Study Area
2.2. Data
3. Methods
3.1. Sentinel-1 Feature Parameters
3.2. Sentinel-2 Feature Parameters
3.3. ASTER-GDEM Feature Parameters
3.4. Modeling Framework for Soil Moisture Content
3.4.1. Parameter Sorting
3.4.2. Building Models
3.4.3. Accuracy Evaluation
4. Results
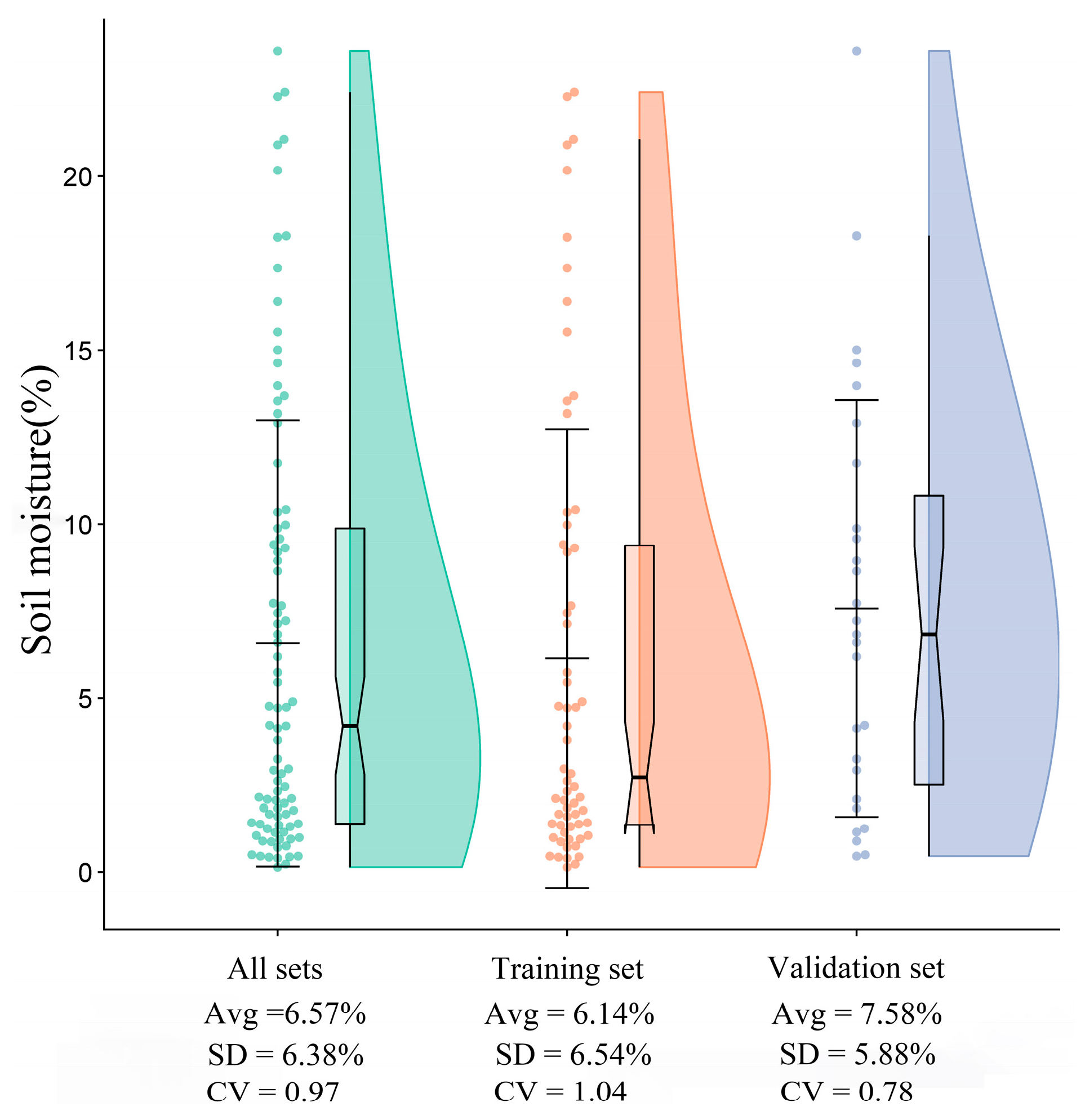
4.1. Statistical Description of Soil Samples
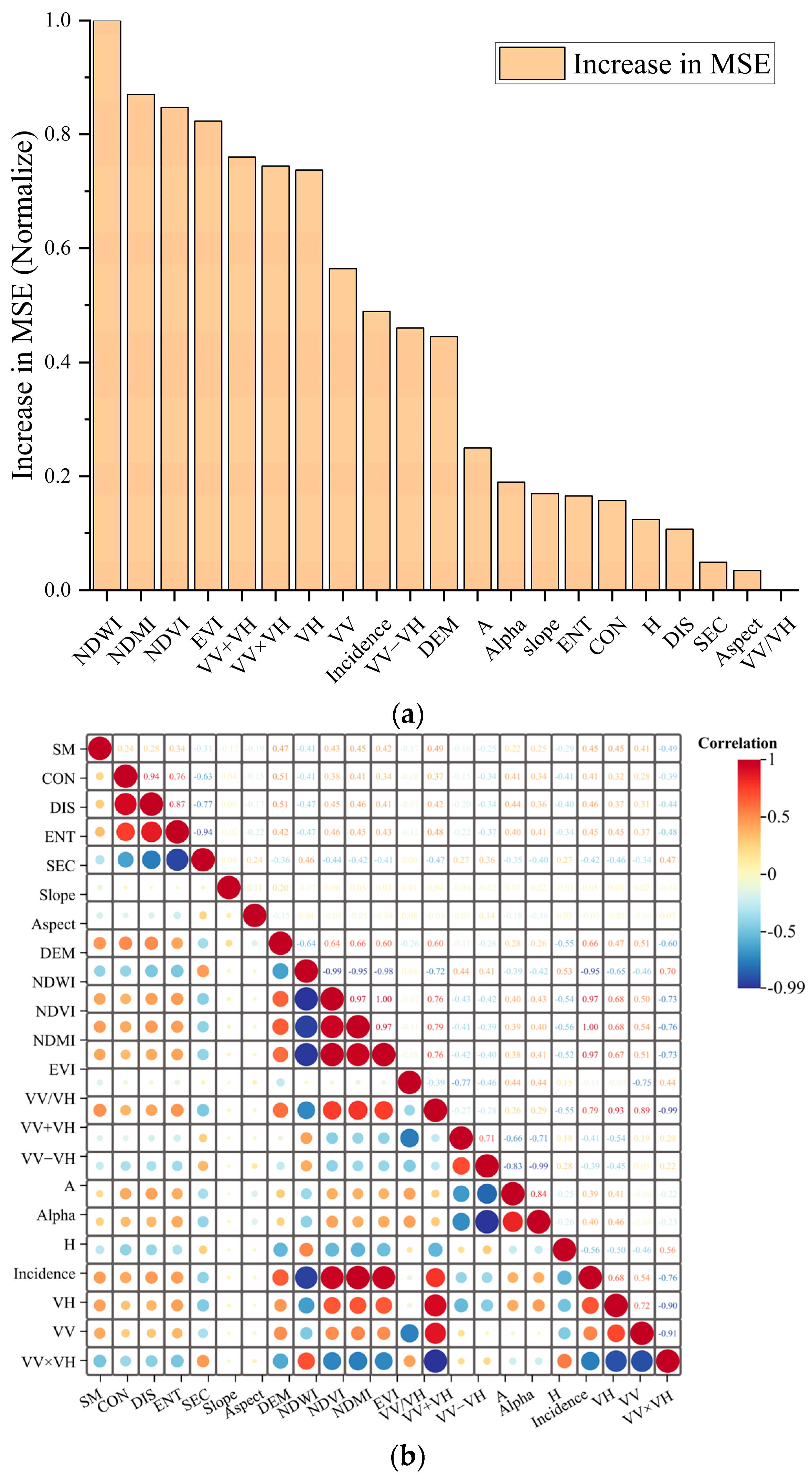
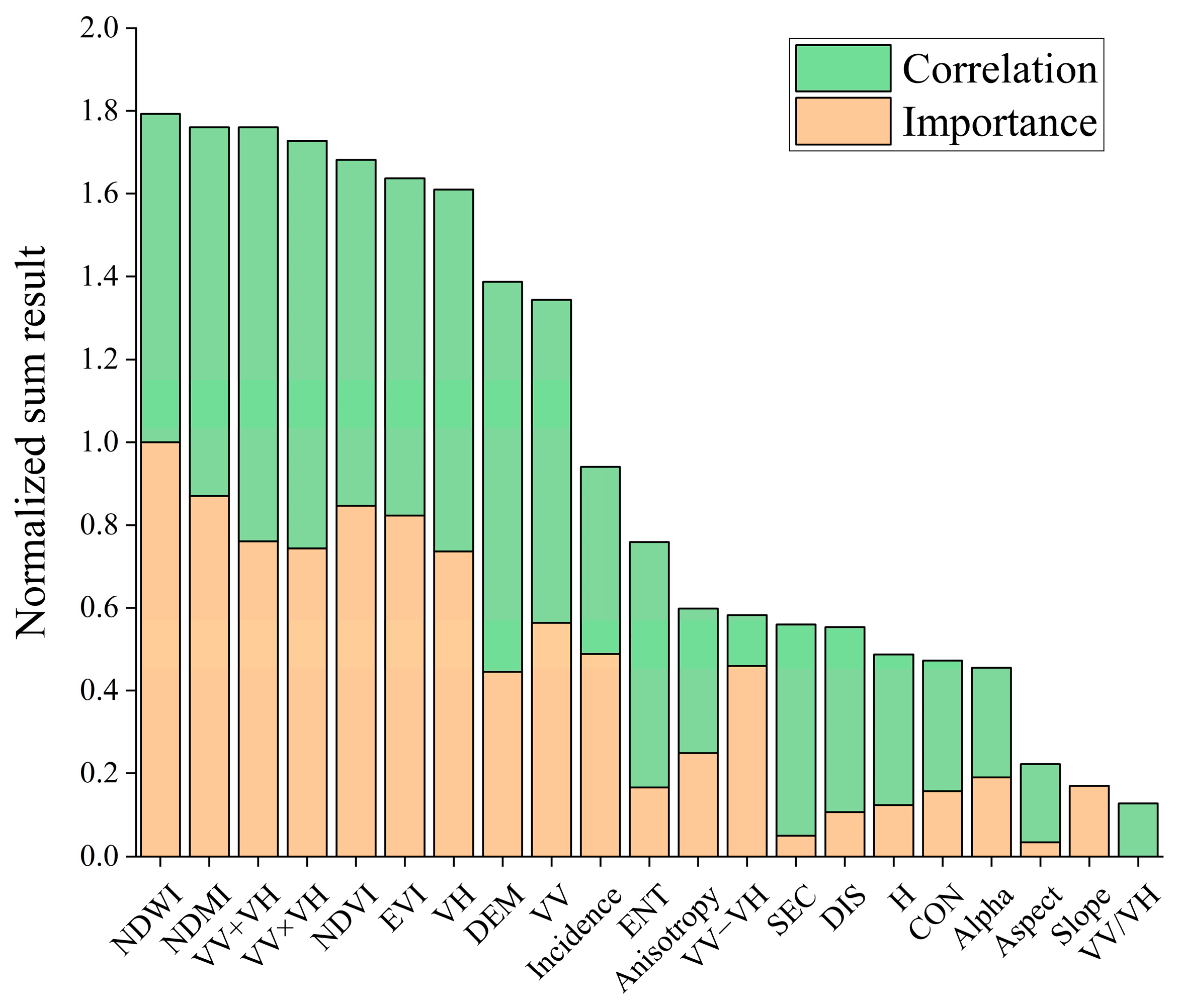
4.2. Characteristic Variable Analysis
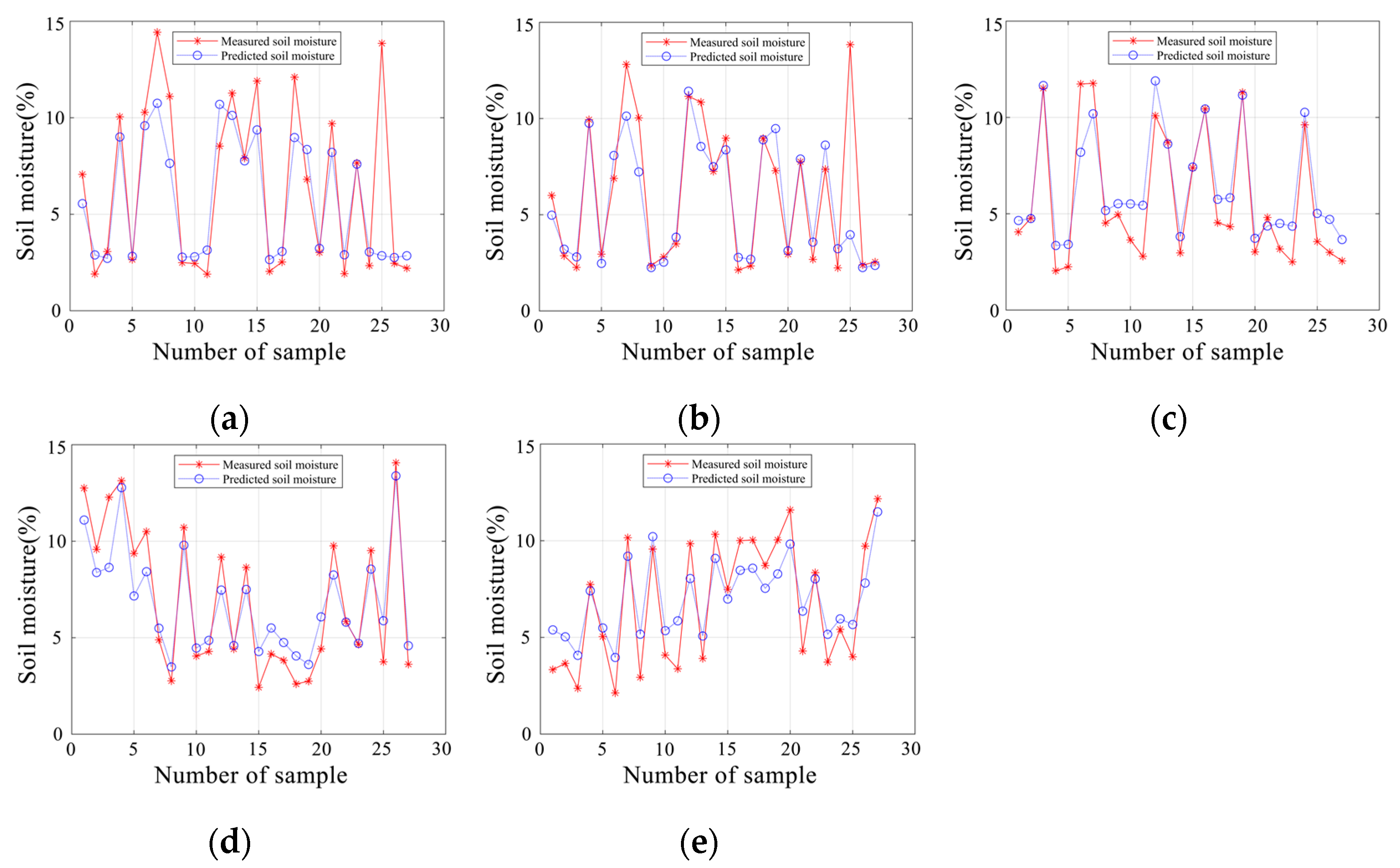
4.3. Comparison and Evaluation of Multiple Models
4.4. Inversion Results
5. Discussion
5.1. Determine Model Input Parameters through Feature Selection
5.2. Estimating Soil Moisture through Ensemble Learning
5.3. Uncertainty Analysis of Research
6. Conclusions
- (1)
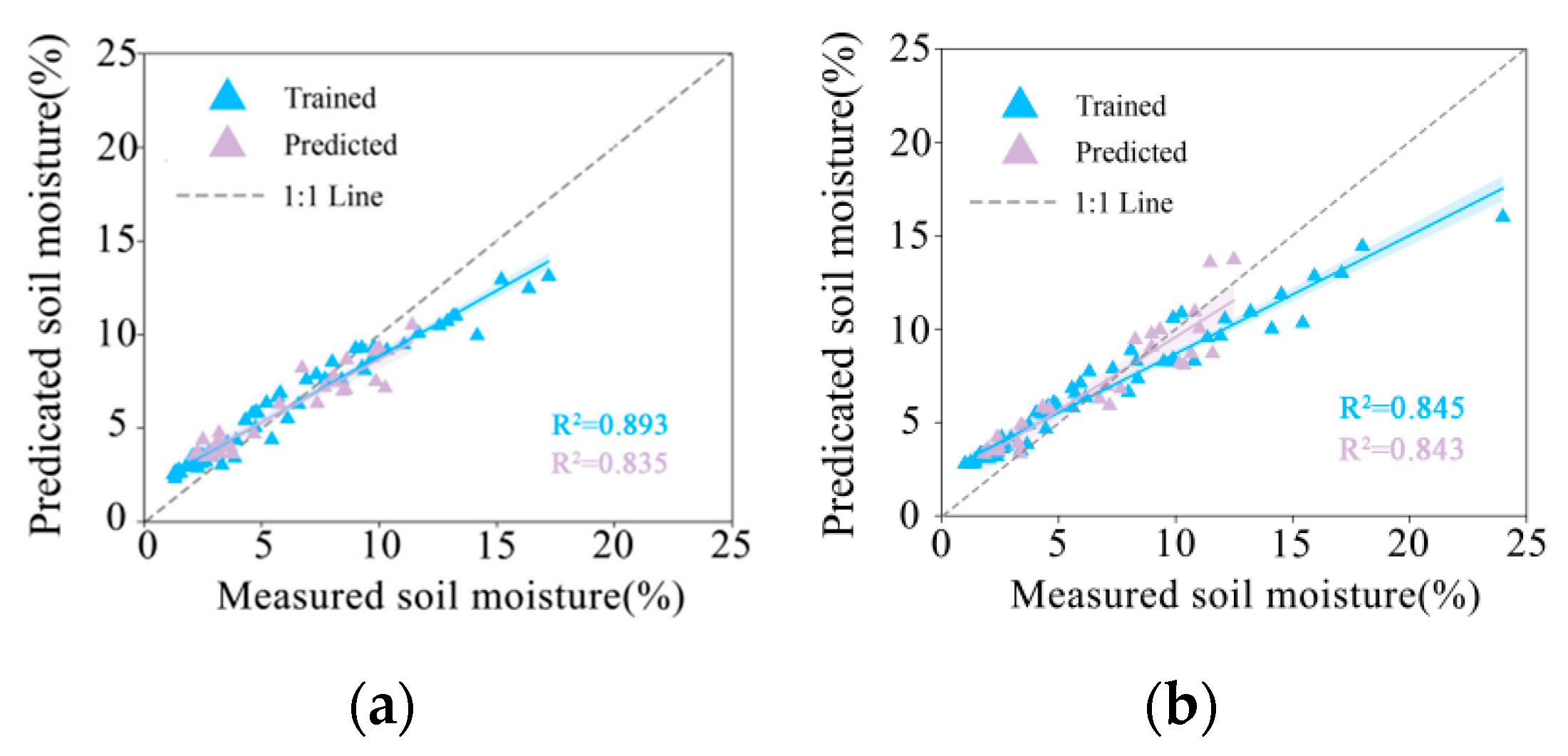
- The analysis indicates a tendency to overestimate soil moisture at lower humidity levels and underestimate it at higher humidity levels.
- (2)
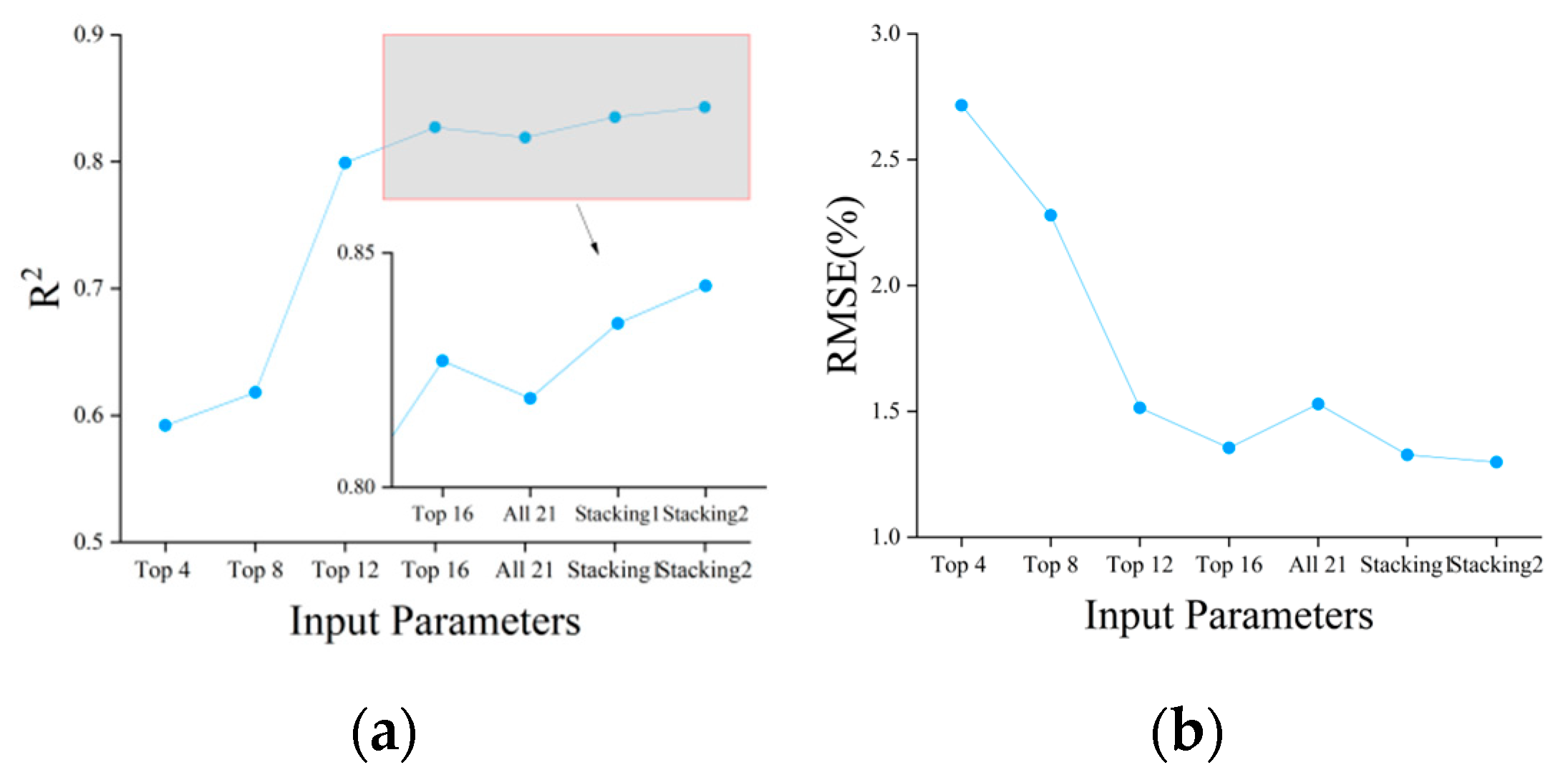
- Among the machine learning models evaluated, CatBoost outperformed RF and LightGBM, achieving the highest prediction accuracy with an R2 of 0.827 and RMSE of 1.355%. This confirms the superiority of CatBoost for small sample datasets and complex soil moisture estimation tasks.
- (3)
- The Stacking ensemble models, Stacking1 and Stacking2, demonstrated enhanced predictive capabilities compared to individual models, with increases in R2 by 0.008 and 0.016, respectively. This underscores the potential of ensemble learning to improve soil moisture inversion accuracy and generalization.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zhu, L.; Yuan, S.; Liu, Y.; Chen, C.; Walker, J.P. Time Series Soil Moisture Retrieval from SAR Data: Multi-Temporal Constraints and a Global Validation. Remote Sens. Environ. 2023, 287, 113466. [Google Scholar] [CrossRef]
- Peng, J.; Albergel, C.; Balenzano, A.; Brocca, L.; Cartus, O.; Cosh, M.H.; Crow, W.T.; Dabrowska-Zielinska, K.; Dadson, S.; Davidson, M.W.J.; et al. A Roadmap for High-Resolution Satellite Soil Moisture Applications—Confronting Product Characteristics with User Requirements. Remote Sens. Environ. 2021, 252, 112162. [Google Scholar] [CrossRef]
- Sadeghi, M.; Ebtehaj, A.; Crow, W.T.; Gao, L.; Purdy, A.J.; Fisher, J.B.; Jones, S.B.; Babaeian, E.; Tuller, M. Global Estimates of Land Surface Water Fluxes from SMOS and SMAP Satellite Soil Moisture Data. J. Hydrometeorol. 2020, 21, 241–253. [Google Scholar] [CrossRef]
- Ye, L.; Xu, Y.; Zhu, G.; Zhang, W.; Jiao, Y. Effects of Different Mulch Types on Farmland Soil Moisture in an Artificial Oasis Area. Land 2024, 13, 34. [Google Scholar] [CrossRef]
- Zhang, Y.; Bu, J.; Zuo, X.; Yu, K.; Wang, Q.; Huang, W. Vegetation Water Content Retrieval from Spaceborne GNSS-R and Multi-Source Remote Sensing Data Using Ensemble Machine Learning Methods. Remote Sens. 2024, 16, 2793. [Google Scholar] [CrossRef]
- Li, Z.-L.; Leng, P.; Zhou, C.; Chen, K.-S.; Zhou, F.-C.; Shang, G.-F. Soil Moisture Retrieval from Remote Sensing Measurements: Current Knowledge and Directions for the Future. Earth-Sci. Rev. 2021, 218, 103673. [Google Scholar] [CrossRef]
- Ge, X.; Ding, J.; Jin, X.; Wang, J.; Chen, X.; Li, X.; Liu, J.; Xie, B. Estimating Agricultural Soil Moisture Content through UAV-Based Hyperspectral Images in the Arid Region. Remote Sens. 2021, 13, 1562. [Google Scholar] [CrossRef]
- Yang, Z.; He, Q.; Miao, S.; Wei, F.; Yu, M. Surface Soil Moisture Retrieval of China Using Multi-Source Data and Ensemble Learning. Remote Sens. 2023, 15, 2786. [Google Scholar] [CrossRef]
- Shokati, H.; Mashal, M.; Noroozi, A.; Abkar, A.A.; Mirzaei, S.; Mohammadi-Doqozloo, Z.; Taghizadeh-Mehrjardi, R.; Khosravani, P.; Nabiollahi, K.; Scholten, T. Random Forest-Based Soil Moisture Estimation Using Sentinel-2, Landsat-8/9, and UAV-Based Hyperspectral Data. Remote Sens. 2024, 16, 1962. [Google Scholar] [CrossRef]
- Cashion, J.; Lakshmi, V.; Bosch, D.; Jackson, T.J. Microwave Remote Sensing of Soil Moisture: Evaluation of the TRMM Microwave Imager (TMI) Satellite for the Little River Watershed Tifton, Georgia. J. Hydrol. 2005, 307, 242–253. [Google Scholar] [CrossRef]
- Chen, K.-S.; Wu, T.-D.; Tsang, L.; Li, Q.; Shi, J.; Fung, A.K. Emission of Rough Surfaces Calculated by the Integral Equation Method with Comparison to Three-Dimensional Moment Method Simulations. IEEE Trans. Geosci. Remote Sens. 2003, 41, 90–101. [Google Scholar] [CrossRef]
- Oh, Y. Quantitative Retrieval of Soil Moisture Content and Surface Roughness from Multipolarized Radar Observations of Bare Soil Surfaces. IEEE Trans. Geosci. Remote Sens. 2004, 42, 596–601. [Google Scholar] [CrossRef]
- Shi, J.; Wang, J.; Hsu, A.Y.; O’Neill, P.E.; Engman, E.T. Estimation of Bare Surface Soil Moisture and Surface Roughness Parameter Using L-Band SAR Image Data. IEEE Trans. Geosci. Remote Sens. 1997, 35, 1254–1266. [Google Scholar] [CrossRef]
- Attema, E.P.W.; Ulaby, F.T. Vegetation Modeled as a Water Cloud. Radio Sci. 1978, 13, 357–364. [Google Scholar] [CrossRef]
- Ulaby, F.T.; Sarabandi, K.; Mcdonald, K.; Whitt, M.; Dobson, M.C. Michigan Microwave Canopy Scattering Model. Int. J. Remote Sens. 1990, 11, 1223–1253. [Google Scholar] [CrossRef]
- Cui, H.; Jiang, L.; Paloscia, S.; Santi, E.; Pettinato, S.; Wang, J.; Fang, X.; Liao, W. The Potential of ALOS-2 and Sentinel-1 Radar Data for Soil Moisture Retrieval with High Spatial Resolution over Agroforestry Areas, China. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–17. [Google Scholar] [CrossRef]
- Baghdadi, N.; El Hajj, M.; Zribi, M.; Bousbih, S. Calibration of the Water Cloud Model at C-Band for Winter Crop Fields and Grasslands. Remote Sens. 2017, 9, 969. [Google Scholar] [CrossRef]
- Rawat, K.S.; Singh, S.K.; Ray, R.L. An Integrated Approach to Estimate Surface Soil Moisture in Agricultural Lands. Geocarto Int. 2021, 36, 1646–1664. [Google Scholar] [CrossRef]
- Li, M.; Yan, Y. Comparative Analysis of Machine-Learning Models for Soil Moisture Estimation Using High-Resolution Remote-Sensing Data. Land 2024, 13, 1331. [Google Scholar] [CrossRef]
- Ma, C.; Li, X.; McCabe, M.F. Retrieval of High-Resolution Soil Moisture through Combination of Sentinel-1 and Sentinel-2 Data. Remote Sens. 2020, 12, 2303. [Google Scholar] [CrossRef]
- Zhang, L.; Lv, X.; Chen, Q.; Sun, G.; Yao, J. Estimation of Surface Soil Moisture during Corn Growth Stage from SAR and Optical Data Using a Combined Scattering Model. Remote Sens. 2020, 12, 1844. [Google Scholar] [CrossRef]
- Carranza, C.; Nolet, C.; Pezij, M.; van der Ploeg, M. Root Zone Soil Moisture Estimation with Random Forest. J. Hydrol. 2021, 593, 125840. [Google Scholar] [CrossRef]
- He, B.; Jia, B.; Zhao, Y.; Wang, X.; Wei, M.; Dietzel, R. Estimate Soil Moisture of Maize by Combining Support Vector Machine and Chaotic Whale Optimization Algorithm. Agric. Water Manag. 2022, 267, 107618. [Google Scholar] [CrossRef]
- Maaoui, W.; Lazhar, R.; Najjari, M. Soil Moisture Retrieval Model Based on Dielectric Measurements and Artificial Neural Network. J. Porous Media 2022, 25, 19–33. [Google Scholar] [CrossRef]
- Breiman, L. Bagging Predictors. Mach. Learn. 1996, 24, 123–140. [Google Scholar] [CrossRef]
- Bartlett, P.; Freund, Y.; Lee, W.S.; Schapire, R.E. Boosting the Margin: A New Explanation for the Effectiveness of Voting Methods. Ann. Stat. 1998, 26, 1651–1686. [Google Scholar] [CrossRef]
- Wang, L.; Gao, Y. Soil Moisture Retrieval from Sentinel-1 and Sentinel-2 Data Using Ensemble Learning over Vegetated Fields. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2023, 16, 1802–1814. [Google Scholar] [CrossRef]
- Zhang, Y.; Liang, S.; Zhu, Z.; Ma, H.; He, T. Soil Moisture Content Retrieval from Landsat 8 Data Using Ensemble Learning. ISPRS J. Photogramm. Remote Sens. 2022, 185, 32–47. [Google Scholar] [CrossRef]
- Liu, Y.; Qian, J.; Yue, H. Combined Sentinel-1A with Sentinel-2A to Estimate Soil Moisture in Farmland. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 1292–1310. [Google Scholar] [CrossRef]
- Feng, L.; Zhang, Z.; Ma, Y.; Du, Q.; Williams, P.; Drewry, J.; Luck, B. Alfalfa Yield Prediction Using UAV-Based Hyperspectral Imagery and Ensemble Learning. Remote Sens. 2020, 12, 2028. [Google Scholar] [CrossRef]
- Zhai, W.; Li, C.; Cheng, Q.; Ding, F.; Chen, Z. Exploring Multisource Feature Fusion and Stacking Ensemble Learning for Accurate Estimation of Maize Chlorophyll Content Using Unmanned Aerial Vehicle Remote Sensing. Remote Sens. 2023, 15, 3454. [Google Scholar] [CrossRef]
- Tao, S.; Zhang, X.; Feng, R.; Qi, W.; Wang, Y.; Shrestha, B. Retrieving Soil Moisture from Grape Growing Areas Using Multi-Feature and Stacking-Based Ensemble Learning Modeling. Comput. Electron. Agric. 2023, 204, 107537. [Google Scholar] [CrossRef]
- Cui, S.; Yin, Y.; Wang, D.; Li, Z.; Wang, Y. A Stacking-Based Ensemble Learning Method for Earthquake Casualty Prediction. Appl. Soft Comput. 2021, 101, 107038. [Google Scholar] [CrossRef]
- Ma, G.; Ding, J.; Han, L.; Zhang, Z.; Ran, S. Digital Mapping of Soil Salinization Based on Sentinel-1 and Sentinel-2 Data Combined with Machine Learning Algorithms. Reg. Sustain. 2021, 2, 177–188. [Google Scholar] [CrossRef]
- Ding, J.; Yu, D. Monitoring and Evaluating Spatial Variability of Soil Salinity in Dry and Wet Seasons in the Werigan–Kuqa Oasis, China, Using Remote Sensing and Electromagnetic Induction Instruments. Geoderma 2014, 235–236, 316–322. [Google Scholar] [CrossRef]
- Wang, F.; Shi, Z.; Biswas, A.; Yang, S.; Ding, J. Multi-Algorithm Comparison for Predicting Soil Salinity. Geoderma 2020, 365, 114211. [Google Scholar] [CrossRef]
- Tan, J.; Ding, J.; Han, L.; Ge, X.; Wang, X.; Wang, J.; Wang, R.; Qin, S.; Zhang, Z.; Li, Y. Exploring PlanetScope Satellite Capabilities for Soil Salinity Estimation and Mapping in Arid Regions Oases. Remote Sens. 2023, 15, 1066. [Google Scholar] [CrossRef]
- He, B.; Ding, J.; Huang, W.; Ma, X. Spatiotemporal Variation and Future Predictions of Soil Salinization in the Werigan–Kuqa River Delta Oasis of China. Sustainability 2023, 15, 13996. [Google Scholar] [CrossRef]
- Baghdadi, N.; Bazzi, H.; El Hajj, M.; Zribi, M. Detection of Frozen Soil Using Sentinel-1 SAR Data. Remote Sens. 2018, 10, 1182. [Google Scholar] [CrossRef]
- Bousbih, S.; Zribi, M.; Lili-Chabaane, Z.; Mougenot, B.; Pelletier, C.; El Hajj, M.; Baghdadi, N. Sentinel-1 and Sentinel-2 Data for the Characterisation of the States of Continental Surface over a Semi-Arid Region En Tunisia. In Proceedings of the 2020 Mediterranean and Middle-East Geoscience and Remote Sensing Symposium (M2GARSS), Tunis, Tunisia, 9–11 March 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 285–288. [Google Scholar]
- Sims, D.A.; Gamon, J.A. Estimation of Vegetation Water Content and Photosynthetic Tissue Area from Spectral Reflectance: A Comparison of Indices Based on Liquid Water and Chlorophyll Absorption Features. Remote Sens. Environ. 2003, 84, 526–537. [Google Scholar] [CrossRef]
- Djamai, N.; Fernandes, R. Comparison of SNAP-Derived Sentinel-2A L2A Product to ESA Product over Europe. Remote Sens. 2018, 10, 926. [Google Scholar] [CrossRef]
- Bhatnagar, S.; Gill, L.; Regan, S.; Naughton, O.; Johnston, P.; Waldren, S.; Ghosh, B. Mapping vegetation communities inside wetlands using Sentinel-2 imagery in Ireland. Int. J. Appl. Earth Obs. Geoinf. 2020, 88, 102083. [Google Scholar] [CrossRef]
- Abdelouhed, F.; Ahmed, A.; Abdellah, A.; Mohammed, I.; Zouhair, O. Extraction and Analysis of Geological Lineaments by Combining ASTER-GDEM and Landsat 8 Image Data in the Central High Atlas of Morocco. Nat. Hazards 2022, 11, 1907–1929. [Google Scholar] [CrossRef]
- Ni, W.; Sun, G.; Ranson, K.J. Characterization of ASTER GDEM Elevation Data over Vegetated Area Compared with Lidar Data. Int. J. Digit. Earth 2015, 8, 198–211. [Google Scholar] [CrossRef]
- Skrunes, S.; Brekke, C.; Jones, C.E.; Espeseth, M.M.; Holt, B. Effect of Wind Direction and Incidence Angle on Polarimetric SAR Observations of Slicked and Unslicked Sea Surfaces. Remote Sens. Environ. 2018, 213, 73–91. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, C.; Min, L.; Guo, Z.; Li, N. Retrieval of Farmland Surface Soil Moisture Based on Feature Optimization and Machine Learning. Remote Sens. 2022, 14, 5102. [Google Scholar] [CrossRef]
- Cloude, S.R.; Pottier, E. An Entropy Based Classification Scheme for Land Applications of Polarimetric SAR. IEEE Trans. Geosci. Remote Sens. 1997, 35, 68–78. [Google Scholar] [CrossRef]
- Bindlish, R.; Barros, A.P. Parameterization of Vegetation Backscatter in Radar-Based, Soil Moisture Estimation. Remote Sens. Environ. 2001, 76, 130–137. [Google Scholar] [CrossRef]
- Penuelas, J.; Pinol, J.; Ogaya, R.; Filella, I. Estimation of Plant Water Concentration by the Reflectance Water Index WI (R900/R970). Int. J. Remote Sens. 1997, 18, 2869–2875. [Google Scholar] [CrossRef]
- Chen, D.; Huang, J.; Jackson, T.J. Vegetation Water Content Estimation for Corn and Soybeans Using Spectral Indices Derived from MODIS Near-and Short-Wave Infrared Bands. Remote Sens. Environ. 2005, 98, 225–236. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, B.; Li, N.; Guo, Z. Cooperative Inversion of Winter Wheat Covered Surface Soil Moisture Based on Sentinel-1/2 Remote Sensing Data. J. Electron. Inf. Technol. 2021, 43, 692–699. [Google Scholar] [CrossRef]
- Huete, A.; Didan, K.; Miura, T.; Rodriguez, E.P.; Gao, X.; Ferreira, L.G. Overview of the Radiometric and Biophysical Performance of the MODIS Vegetation Indices. Remote Sens. Environ. 2002, 83, 195–213. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I.H. Textural Features for Image Classification. IEEE Trans. Syst. Man Cybern. 1973, SMC-3, 610–621. [Google Scholar] [CrossRef]
- Han, H.; Zeng, Q.; Jiao, J. Quality Assessment of TanDEM-X DEMs, SRTM and ASTER GDEM on Selected Chinese Sites. Remote Sens. 2021, 13, 1304. [Google Scholar] [CrossRef]
- Wang, C.; Xie, Q.; Gu, X.; Yu, T.; Meng, Q.; Zhou, X.; Han, L.; Zhan, Y. Soil Moisture Estimation Using Bayesian Maximum Entropy Algorithm from FY3-B, MODIS and ASTER GDEM Remote-Sensing Data in a Maize Region of HeBei Province, China. Int. J. Remote Sens. 2020, 41, 7018–7041. [Google Scholar] [CrossRef]
- Veronika Dorogush, A.; Ershov, V.; Gulin, A. CatBoost: Gradient Boosting with Categorical Features Support. arXiv 2018, arXiv:1810.11363. [Google Scholar]
- Ke, G.; Meng, Q.; Finley, T.; Wang, T.; Chen, W.; Ma, W.; Ye, Q.; Liu, T.-Y. Lightgbm: A Highly Efficient Gradient Boosting Decision Tree. Adv. Neural Inf. Process. Syst. 2017, 30, 52. [Google Scholar]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Dietterich, T.G. Ensemble Learning. Handb. Brain Theory Neural Netw. 2002, 2, 110–125. [Google Scholar]
- Saber, M.; Boulmaiz, T.; Guermoui, M.; Abdrabo, K.I.; Kantoush, S.A.; Sumi, T.; Boutaghane, H.; Nohara, D.; Mabrouk, E. Examining LightGBM and CatBoost Models for Wadi Flash Flood Susceptibility Prediction. Geocarto Int. 2022, 37, 7462–7487. [Google Scholar] [CrossRef]
- Ge, X.; Sun, J.; Lu, B.; Chen, Q.; Xun, W.; Jin, Y. Classification of Oolong Tea Varieties Based on Hyperspectral Imaging Technology and BOSS-LightGBM Model. J. Food Process Eng. 2019, 42, e13289. [Google Scholar] [CrossRef]
- Chang, X.; Xing, Y.; Gong, W.; Yang, C.; Guo, Z.; Wang, D.; Wang, J.; Yang, H.; Xue, G.; Yang, S. Evaluating Gross Primary Productivity over 9 ChinaFlux Sites Based on Random Forest Regression Models, Remote Sensing, and Eddy Covariance Data. Sci. Total Environ. 2023, 875, 162601. [Google Scholar] [CrossRef]
- Wang, H.; Magagi, R.; Goïta, K. Potential of a Two-Component Polarimetric Decomposition at C-Band for Soil Moisture Retrieval over Agricultural Fields. Remote Sens. Environ. 2018, 217, 38–51. [Google Scholar] [CrossRef]
- Zhang, Y.; Han, W.; Zhang, H.; Niu, X.; Shao, G. Evaluating Soil Moisture Content under Maize Coverage Using UAV Multimodal Data by Machine Learning Algorithms. J. Hydrol. 2023, 617, 129086. [Google Scholar] [CrossRef]
- Luo, L.; Li, Y.; Guo, F.; Huang, Z.; Wang, S.; Zhang, Q.; Zhang, Z.; Yao, Y. Research on Robust Inversion Model of Soil Moisture Content Based on GF-1 Satellite Remote Sensing. Comput. Electron. Agric. 2023, 213, 108272. [Google Scholar] [CrossRef]
- Zandi, O.; Zahraie, B.; Nasseri, M.; Behrangi, A. Stacking Machine Learning Models versus a Locally Weighted Linear Model to Generate High-Resolution Monthly Precipitation over a Topographically Complex Area. Atmos. Res. 2022, 272, 106159. [Google Scholar] [CrossRef]
- Jia, W.; Cheng, J.; Hu, H. A Cluster-Stacking-Based Approach to Forecasting Seasonal Chlorophyll-a Concentration in Coastal Waters. IEEE Access 2020, 8, 99934–99947. [Google Scholar] [CrossRef]
- Cheng, M.; Jiao, X.; Liu, Y.; Shao, M.; Yu, X.; Bai, Y.; Wang, Z.; Wang, S.; Tuohuti, N.; Liu, S.; et al. Estimation of Soil Moisture Content under High Maize Canopy Coverage from UAV Multimodal Data and Machine Learning. Agric. Water Manag. 2022, 264, 107530. [Google Scholar] [CrossRef]
- Wadoux, A.M.J.-C.; Minasny, B.; McBratney, A.B. Machine Learning for Digital Soil Mapping: Applications, Challenges and Suggested Solutions. Earth-Sci. Rev. 2020, 210, 103359. [Google Scholar] [CrossRef]
- Vaysse, K.; Lagacherie, P. Using Quantile Regression Forest to Estimate Uncertainty of Digital Soil Mapping Products. Geoderma 2017, 291, 55–64. [Google Scholar] [CrossRef]
- Brungard, C.; Nauman, T.; Duniway, M.; Veblen, K.; Nehring, K.; White, D.; Salley, S.; Anchang, J. Regional Ensemble Modeling Reduces Uncertainty for Digital Soil Mapping. Geoderma 2021, 397, 114998. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Type | Data |
|---|---|
| Imaging date | 19 June 2022 |
| Data Format | Level-1 SLC |
| Polarized | VV+VH |
| Projection method | UTM |
| Band | C-Band, 5.405 GHz |
| Flight direction | ASCENDING |
| Incident angle | 38.9° |
| Distance sampling interval | 13.9 m |
| Azimuth sampling interval | 2.33 m |
| Sub-bands | IW1, IW2, IW3 |
| Dataset | Features | Formulation/Simple Description |
|---|---|---|
| Sentinel-1 | Incidence angle | θ |
| Backscatter coefficient | VV, VH, VV+VH, VV-VH, VV×VH, VV/VH | |
| Polarization decomposition (H/A/α) | ||
| Sentinel-2 | NDMI | |
| NDVI | ||
| NDWI | ||
| EVI | ||
| GLCM | Contrast (CON), Dissimilarity (DIS), Entropy (ENT), Second moment (SEC) | |
| ASTER-GDEM | DEM | Elevation |
| Slope | ||
| Aspect |
| Parameter Combination | Model | T-R2 | V-R2 | V-RMSE | V-MAE |
|---|---|---|---|---|---|
| Top 4 features | RF | 0.607 | 0.567 | 2.797% | 1.650% |
| CatBoost | 0.752 | 0.592 | 2.716% | 1.749% | |
| LightGBM | 0.651 | 0.598 | 2.69% | 1.525% | |
| Top 8 features | RF | 0.717 | 0.581 | 2.387% | 1.286% |
| CatBoost | 0.848 | 0.618 | 2.279% | 1.278% | |
| LightGBM | 0.683 | 0.579 | 2.392% | 1.272% | |
| Top 12 features | RF | 0.814 | 0.712 | 1.812% | 1.456% |
| CatBoost | 0.821 | 0.799 | 1.514% | 1.249% | |
| LightGBM | 0.770 | 0.707 | 1.828% | 1.465% | |
| Top 16 features | RF | 0.789 | 0.728 | 1.743% | 1.537% |
| CatBoost | 0.848 | 0.827 | 1.355% | 1.319% | |
| LightGBM | 0.835 | 0.742 | 1.475% | 1.380% | |
| All 21 features | RF | 0.732 | 0.700 | 1.918% | 1.249% |
| CatBoost | 0.822 | 0.819 | 1.529% | 1.222% | |
| LightGBM | 0.853 | 0.786 | 1.867% | 1.024% |
| Remote Sensing Source | Model | Sample Depth | Performance |
|---|---|---|---|
| Sentinel-1/2, Radarsat-2 | Random Forest | 0–5 cm | R2 = 0.64, RMSE = 2.64% |
| GF-1 | Robust Extreme Learning Machine | 0–20 cm | R2 = 0.696, RMSE = 1.8% |
| UAV | Extreme Gradient Boost | 0–10 cm | R2 = 0.921, RMSE = 1.9% |
| Sentinel-1/2 | Random Forest | 0–5 cm | MAE = 2.289%, RMSE = 2.934% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Hao, Z.; Ding, J.; Zhang, Y.; Miao, Z.; Zheng, Y.; Alimu, A.; Cheng, H.; Li, X. Ensemble Machine-Learning-Based Framework for Estimating Surface Soil Moisture Using Sentinel-1/2 Data: A Case Study of an Arid Oasis in China. Land 2024, 13, 1635. https://doi.org/10.3390/land13101635
Liu J, Hao Z, Ding J, Zhang Y, Miao Z, Zheng Y, Alimu A, Cheng H, Li X. Ensemble Machine-Learning-Based Framework for Estimating Surface Soil Moisture Using Sentinel-1/2 Data: A Case Study of an Arid Oasis in China. Land. 2024; 13(10):1635. https://doi.org/10.3390/land13101635
Chicago/Turabian StyleLiu, Junhao, Zhe Hao, Jianli Ding, Yukun Zhang, Zhiguo Miao, Yu Zheng, Alimira Alimu, Huiling Cheng, and Xiang Li. 2024. "Ensemble Machine-Learning-Based Framework for Estimating Surface Soil Moisture Using Sentinel-1/2 Data: A Case Study of an Arid Oasis in China" Land 13, no. 10: 1635. https://doi.org/10.3390/land13101635
APA StyleLiu, J., Hao, Z., Ding, J., Zhang, Y., Miao, Z., Zheng, Y., Alimu, A., Cheng, H., & Li, X. (2024). Ensemble Machine-Learning-Based Framework for Estimating Surface Soil Moisture Using Sentinel-1/2 Data: A Case Study of an Arid Oasis in China. Land, 13(10), 1635. https://doi.org/10.3390/land13101635