
A Practical Assessment of Using sUASs (Drones) to Detect and Quantify Wright Fishhook Cactus (Sclerocactus wrightiae L.D. Benson) Populations in Desert Grazinglands


Abstract
:1. Introduction
2. Materials and Methods
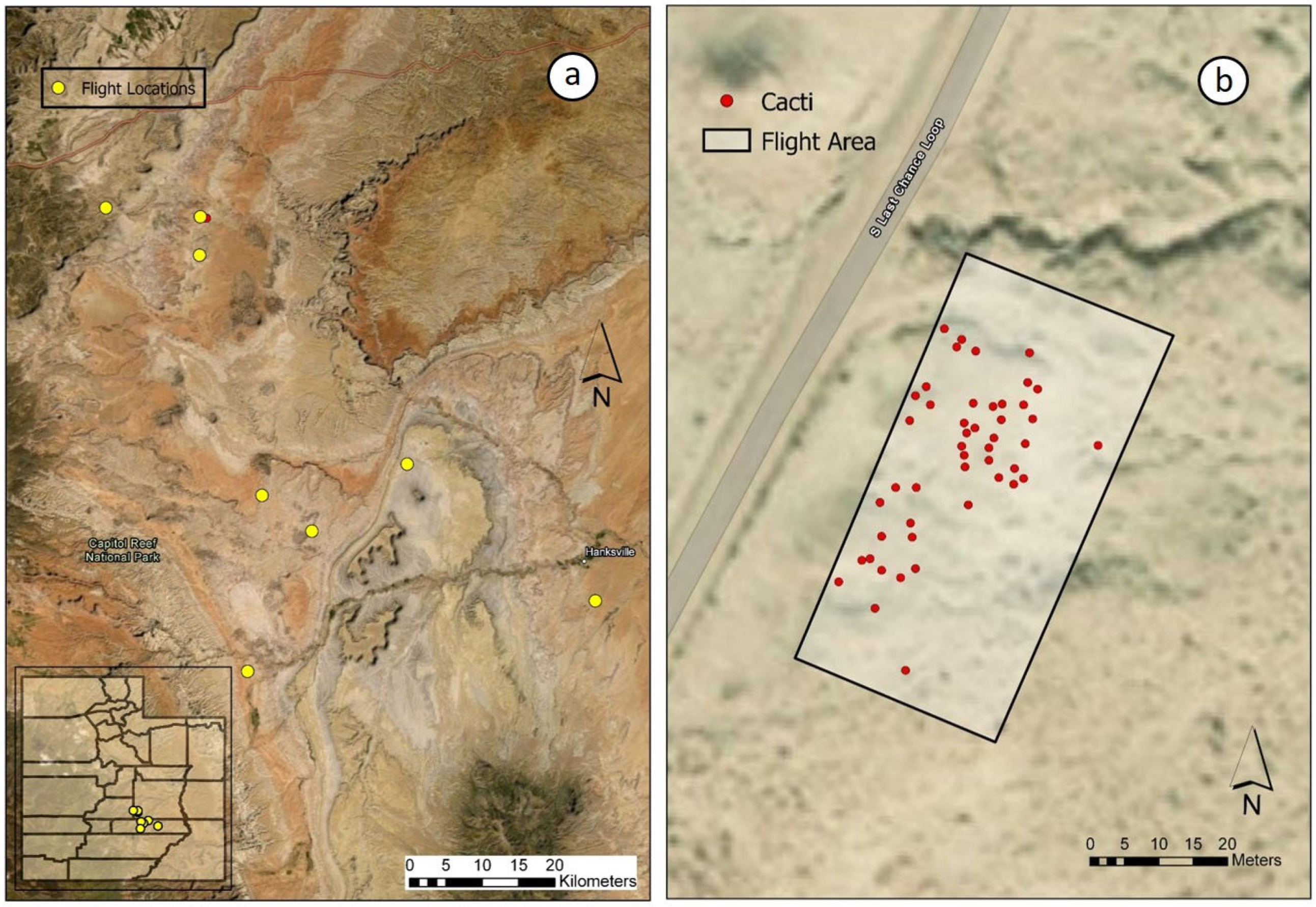
2.1. Study Area and Survey Locations
2.2. Mission Planning and Flights
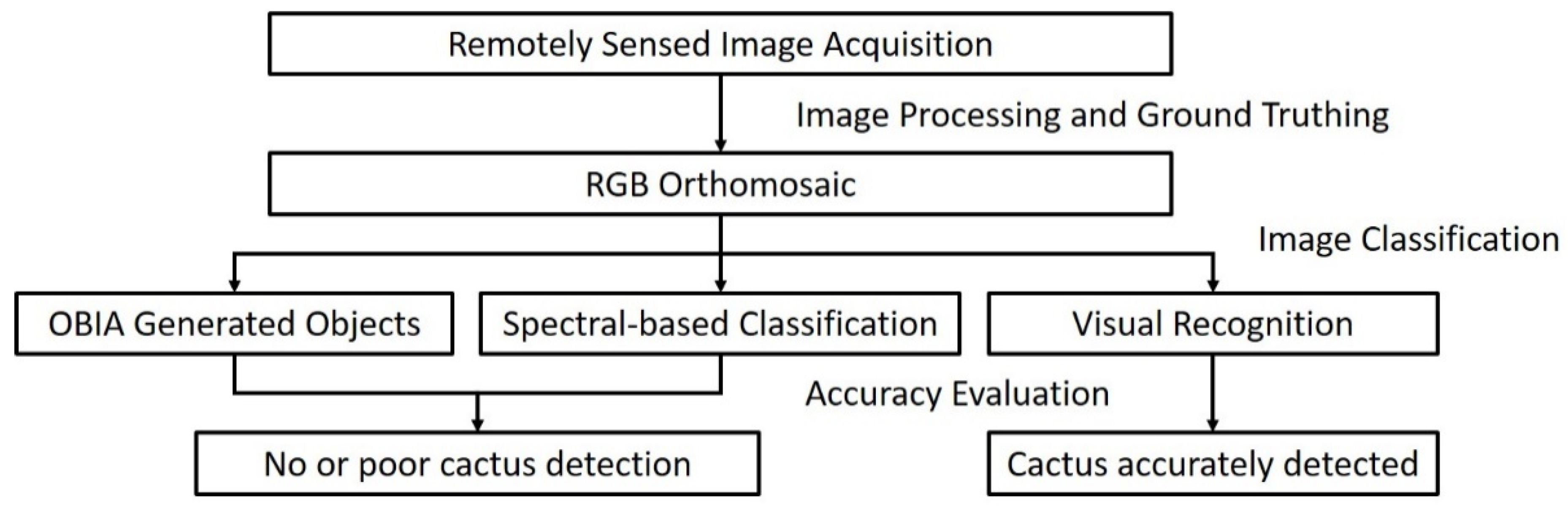
2.3. Image Processing and Ground Truthing
2.4. Analyses
2.5. Validation Matrix
2.6. Mixed Modeling
3. Results
3.1. Validation Matrix
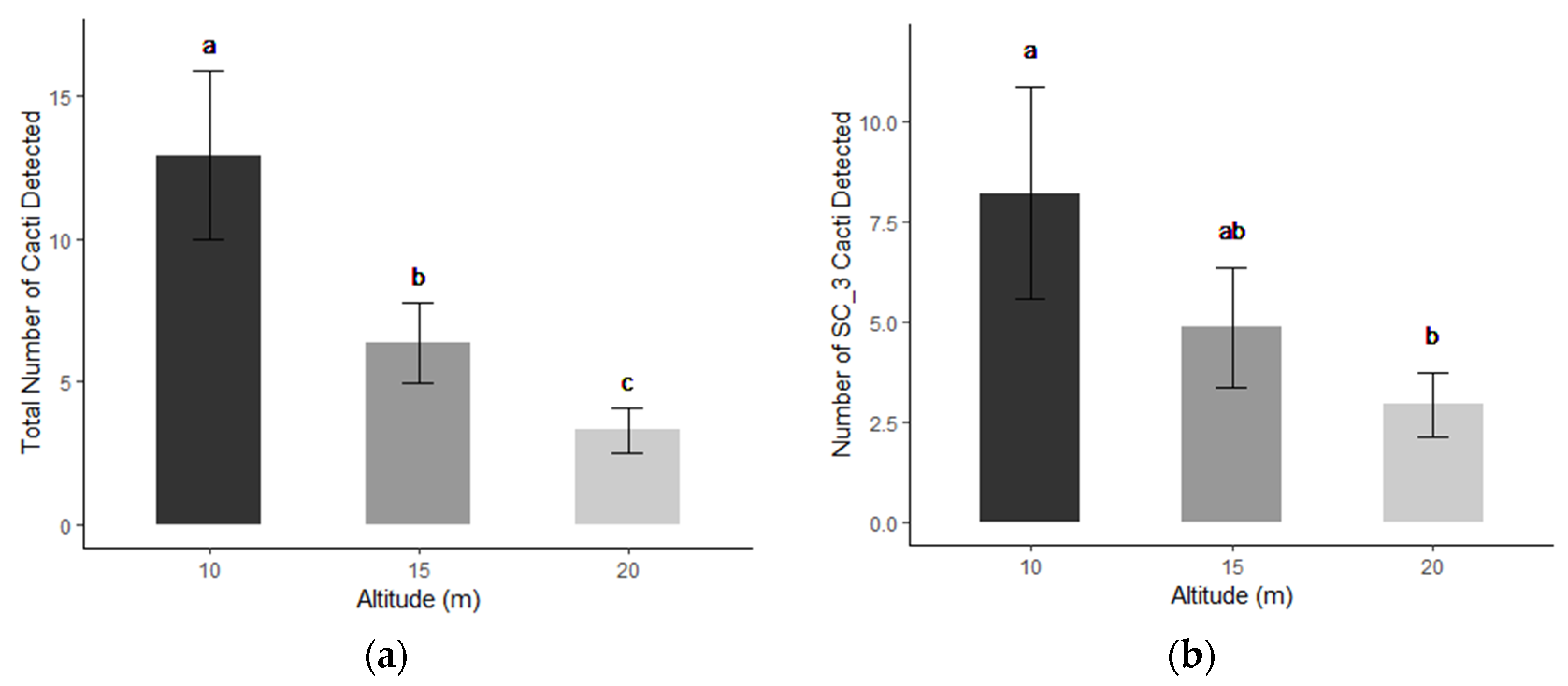
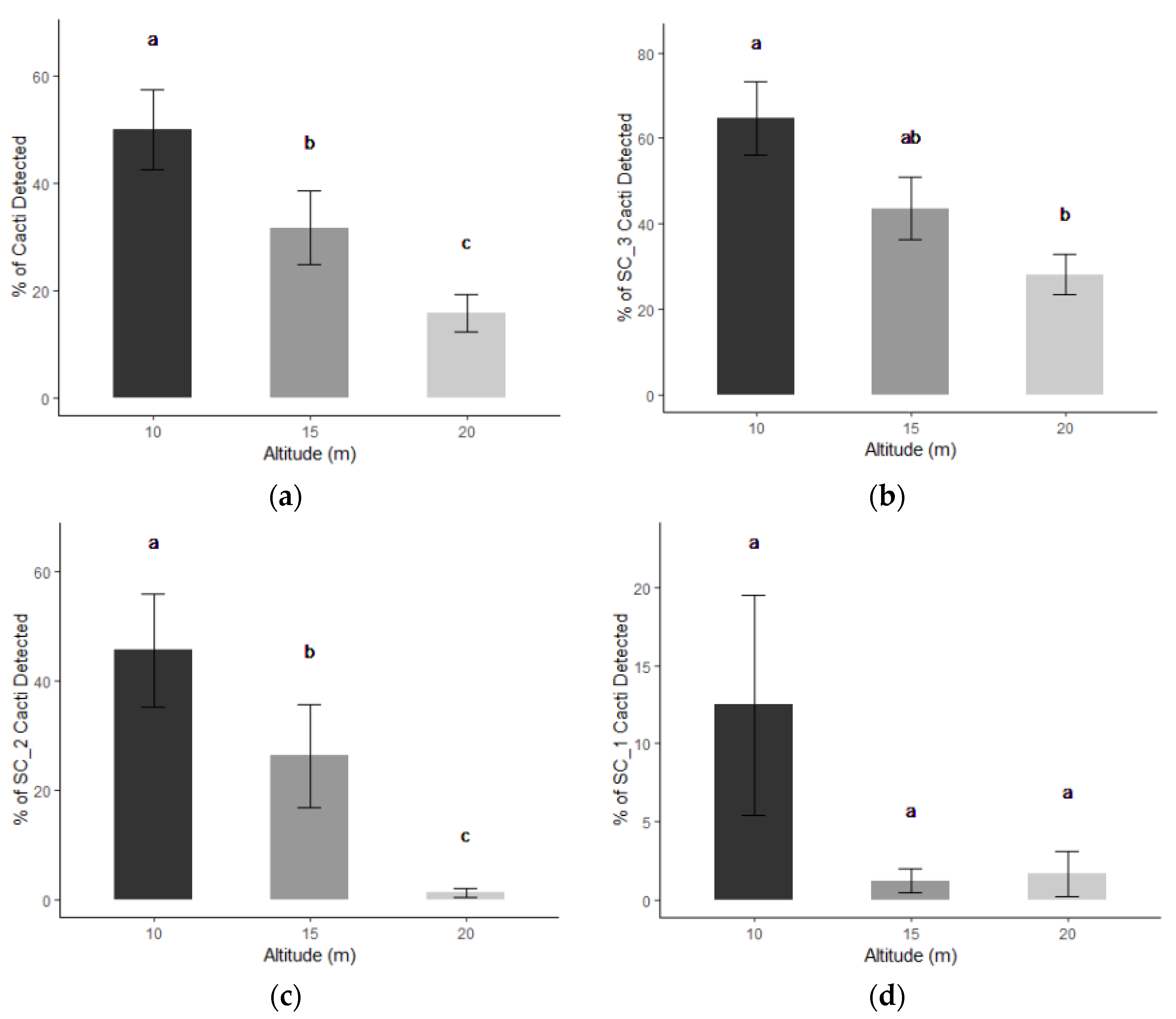
3.2. Mixed Models
4. Discussion
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hagen, A.N.; Hodges, K.E. Resolving Critical Habitat Designation Failures: Reconciling Law, Policy. Soc. Cons. Bio. 2006, 20, 399–407. [Google Scholar] [CrossRef] [PubMed]
- USFWS (U.S. Fish and Wildlife Service). Endangered and Threatened Wildlife and Plants: Notice of Intent to Clarify the Role of Habitat in Endangered Species Conservation. Department of the Interior Fish and Wildlife Service. Fed. Regist. 1999, 64, 31871–31874. [Google Scholar]
- USESA. Endangered Species Act of 1973, as Amended through the 100th Congress; United States Fish and Wildlife Service, United States Department of the Interior: Washington, DC, USA, 1973.
- USFWS. Endangered and Threatened Wildlife and Plants: Determination That the Purple-Spined Hedgehog Cactus and Wright Fishhook Cactus Are Endangered Species. Rules and Regulations Department of the Interior Fish and Wildlife Service 50 CPFI Part 17. Fed. Regist. 1979, 44, 58866–58868. [Google Scholar]
- BLM (Bureau of Land Management). Three-Year Summary Report 2011–2013 Initial and Repeat Inventory for Wright Fishhook Cactus (Sclerocactus wrightiae); Unpublished Agency Report; Field Office: Richfield, UT, USA, 2013.
- Benson, L.D. Cactaceae Emery Co., San Rafael Ridge (A Revision of Sclerocactus). Cactus Succulence J. 1966, 38, 55–57. [Google Scholar]
- Welsh, S.L.; Atwood, N.D.; Goodrich, S.; Higgins, L.C. A Utah Flora, 3rd ed.; Brigham Young University: Provo, UT, USA, 2003; pp. 77–79. ISBN 978-08-4252-701-9. [Google Scholar]
- BLM. Monitoring Plan for Wright Fishhook Cactus (Sclerocactus wrightiae) on BLM Lands in Emery, Sevier and Wayne Counties, Utah; Unpublished Agency Report; Field Office: Richfield, UT, USA, 2015. [Google Scholar]
- Spector, T. Impacts to Federally Listed Cacti Species from Livestock on the Colorado Plateau in Utah: A Review and Summary; Unpublished Agency Report; Utah Field Office, Ecological Services, U.S. Fish and Wildlife Service: West Valley, UT, USA, 2013.
- Neese, E. Final Report Habitat Inventory of Sclerocactus wrightiae and Other Associated Sensitive Species; Unpublished Agency Report; Bureau of Land Management, Richfield Field Office: Richfield, UT, USA, 1987.
- Kass, R.J. Final Report of Habitat Inventory of Threatened, Endangered and Candidate Plant Species in the San Rafael Swell, Utah; Unpublished Agency Report; Bureau of Land Management, Utah State Office: Logan, UT, USA, 1990.
- USFWS. Endangered and Threatened Wildlife and Plants: 90-Day Finding on a Petition to Delist Sclerocactus wrightiae (Wright Fishhook Cactus) and initiation of a 5-Year Status Review. Department of the Interior Fish and Wildlife Service 50 CFR Part 17. Fed. Regist. 2005, 70, 44544–44546. [Google Scholar]
- Clark, D.J. Survey Results for Wright Fishhook Cactus (Sclerocactus wrightiae); Unpublished Agency Report; National Park Service, Capitol Reef National Park; Bureau of Land Management, Richfield Field Office: Richfield, UT, USA, 2001.
- Hulet, A.; Roundy, B.A.; Petersen, S.L.; Jensen, R.R.; Bunting, S.C. Assessing the Relationship between Ground Measurements and Object-Based Image Analysis of Land Cover Classes in Pinyon and Juniper Woodlands. Photogramm. Eng. Remote Sens. 2013, 79, 799–808. [Google Scholar] [CrossRef]
- Tay, J.Y.L.; Erfmeier, A.; Kalwij, J.M. Reaching new heights: Can drones replace current methods to study plant population dynamics? Plant Ecol. 2018, 219, 1139–1150. [Google Scholar] [CrossRef]
- Martin, J.; Edwards, H.H.; Burgess, M.A.; Percival, H.F.; Fagan, D.E.; Gardner, B.E.; Ortega-Ortiz, J.G.; Ifju, P.G.; Evers, B.S.; Rambo, T.J. Estimating Distribution of Hidden Objects with Drones: From Tennis Balls to Manatees. PLoS ONE 2012, 7, e38882. [Google Scholar] [CrossRef] [PubMed]
- Rominger, K.; Meyer, S.E. Application of UAV-Based Methodology for Census of an Endangered Plant Species in a Fragile Habitat. Remote Sens. 2019, 11, 719. [Google Scholar] [CrossRef] [Green Version]
- Atitallah, S.B.; Driss, M.; Boulila, W.; Koubaa, A.; Atitallah, N.; Ghezala, H.B. An enhanced randomly initialized convolutional neural network for columnar cactus recognition in unmanned aerial vehi-cle imagery. Computer Science–Computer Vision and Pattern Recognition. arXiv 2021, arXiv:2015.04430. [Google Scholar]
- Cerrejón, C.; Valeria, O.; Marchand, P.; Caners, R.T.; Fenton, N.J. No place to hide: Rare plant detection through remote sensing. Divers. Distrib. 2021, 27, 948–961. [Google Scholar] [CrossRef]
- R Core Team. A Language and Environment for Statistical Computing; R Core Team: Vienna, Austria, 2018. [Google Scholar]
- Bates, D.; Maechler, M.; Bolker, B.; Walker, S. Fitting linear mixed-effects models using lme4. arXiv 2014, arXiv:1406.5823. [Google Scholar]
- Kuznetsova, A.; Brockhoff, P.B.; Christensen, R.H.B. lmerTest Package: Tests in linear mixed effects models. J. Stat. Softw. 2017, 82, 1–26. [Google Scholar] [CrossRef] [Green Version]
- Barton, K. MuMIn: Multi-Model Inference, R Package Version 0.12.0. Available online: http://r-forge.r-project.org/projects/mumin/ (accessed on 1 January 2020).
- Kass, R.J. Mortality of the endangered Wright fishhook cactus (Sclerocatus wrightiae) by an Opuntia-borer beetle (Cerambycidae: Moneilema semipunctatum). West N. Am. Nat. 2001, 61, 495–497. [Google Scholar]
- Cruzan, M.B.; Weinstein, B.G.; Grasty, M.R.; Kohrn, B.F.; Hendrickson, E.C.; Arredondo, T.M.; Thompson, P.G. Small Unmanned Aerial Vehicles (Micro-Uavs, Drones) in Plant Ecology. App. Plant Sci. 2016, 4, 1600041. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Attribute | Specification |
|---|---|
| Aircraft | DJI Phantom 4 Pro |
| Sensor | DJI 20MP RGB camera |
| Camera Type | Frame |
| FOV (degree) | 84 |
| Aperture (F-stop) | f/2.8–f/11 |
| Flight Height | 10 m, 15 m, 20 m |
| Image Resolution (GMD) | 0.25 cm, 0.40 cm, 0.55 cm |
| Image side-lap | 80% |
| sUAS Imagery | Total Cactus Counts | |||
|---|---|---|---|---|
| Height | Marked | Confirmed | Missed | Actual |
| 10 m | 284 | 183 | 297 | 480 |
| 15 m | 234 | 89 | 391 | 480 |
| 20 m | 185 | 46 | 434 | 480 |
| sUAS | Commission | Confirmed 1 | Missed 2 | Correction Terms | ||
|---|---|---|---|---|---|---|
| Imagery | Error (%) | (%) | (%) | EOC 3 | EOO 4 | Net Error 5 |
| 10 m | 35.3 | 64.7 | 61.9 | 0.647 ± 0.049 | 2.81 ± 0.58 | 1.62 ± 0.202 |
| 15 m | 58.4 | 41.6 | 81.5 | 0.416 ± 0.059 | 6.18 ± 1.43 | 2.14 ± 0.486 |
| 20 m | 73.4 | 26.6 | 90.4 | 0.266 ± 0.047 | 13.71 ± 3.78 | 2.52 ± 0.433 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bates, T.H.; Anderson, V.J.; Johnson, R.L.; Allphin, L.; Rooks, D.; Petersen, S.L. A Practical Assessment of Using sUASs (Drones) to Detect and Quantify Wright Fishhook Cactus (Sclerocactus wrightiae L.D. Benson) Populations in Desert Grazinglands. Land 2022, 11, 655. https://doi.org/10.3390/land11050655
Bates TH, Anderson VJ, Johnson RL, Allphin L, Rooks D, Petersen SL. A Practical Assessment of Using sUASs (Drones) to Detect and Quantify Wright Fishhook Cactus (Sclerocactus wrightiae L.D. Benson) Populations in Desert Grazinglands. Land. 2022; 11(5):655. https://doi.org/10.3390/land11050655
Chicago/Turabian StyleBates, Thomas H., Val J. Anderson, Robert L. Johnson, Loreen Allphin, Dustin Rooks, and Steven L. Petersen. 2022. "A Practical Assessment of Using sUASs (Drones) to Detect and Quantify Wright Fishhook Cactus (Sclerocactus wrightiae L.D. Benson) Populations in Desert Grazinglands" Land 11, no. 5: 655. https://doi.org/10.3390/land11050655
APA StyleBates, T. H., Anderson, V. J., Johnson, R. L., Allphin, L., Rooks, D., & Petersen, S. L. (2022). A Practical Assessment of Using sUASs (Drones) to Detect and Quantify Wright Fishhook Cactus (Sclerocactus wrightiae L.D. Benson) Populations in Desert Grazinglands. Land, 11(5), 655. https://doi.org/10.3390/land11050655