1. Introduction
The aims of environmental education are to cultivate a sense of ethical responsibility for the environment and to convey correct knowledge, attitudes, and skills to the public for protecting and maintaining the natural environments. Environmental protection is a practice of conserving environments for the benefit of the human being and all creatures on earth. Due to the pressures of population and economic development, the natural environment is being degraded. Therefore, excessive human interference and destruction should be prevented such that the ultimate goals of co-prosperity and coexistence between humans and their environments can be achieved. In the Belgrade Charter, proposed by the United Nations Educational, Scientific and Cultural Organization (UNESCO), specifics on the goals of environmental education and relevant contents were defined. The goal is to develop a world population that is aware of and concerned about the environment as well as its associated problems [
1].
Ecosystems, in all their diversity, possess essential functions and critical services in a chain interaction between organisms and their environments. Wetlands provide habitats and food sources for aquatic creatures, divert the flow of water during flooding events, purify water, and affect food safety [
2]. Due to the lack of knowledge on the necessity of their protection, wetlands are now fragmented and threatened by the impacts of economic development [
3]. To ensure the sustainability of ecosystems, several researchers and educational institutions have promoted environmental education in which field trips and recreational activities are integrated in course design to enhance environmental awareness and understanding of wetland ecology [
4,
5,
6,
7].
Conventional environmental education on wetland ecology is categorized as on-site teaching and classroom teaching [
8]. On-site teaching is typically conducted via guided tours along with the use of printed brochures provided by tourist centers [
9]. However, in addition to excessive labor costs, field trips are limited by the factors of time, space and the weather conditions. On the other hand, classroom teaching relies mainly on textbooks, instructional media and online resources. Students can learn about wetland ecology by reading textbooks and watching videos under the instruction of their teachers. However, conventional teaching materials are less interactive, so it is difficult to immerse students in the learning context. The major deficiency is that they cannot see the actual ecosystems and this reduces the learning motivation and learning effectiveness. Considering the advantages and disadvantages of on-site teaching and classroom teaching, researchers proposed using the virtual reality (VR) simulation to develop immersive learning models for increasing learning motivation and learning effectiveness [
10,
11,
12].
Virtual reality is an information and communication technology (ICT) to create an immersive environment where users can react in a similar way they would in real life. They can interact with the virtual environment using various devices such as the head-mounted display (HMD) and data gloves to see, hear and feel as if situated in the real environment. The combination of visual, auditory and tactile sensations through VR creates an immersive environment without damaging actual environments or causing danger to the individual [
13]. Dubovi, Levy and Dagan [
14] constructed a virtual environment for the acquisition of knowledge on hospital administration by using the desktop VR simulation to practice relevant medication procedures. Although the learning effectiveness was high, the level of immersion was compromised because the desktop VR was susceptible to the environmental interference.
Broyer et al. [
15] built a virtual laboratory to organize teaching activities related to laboratory safety, providing an immersive learning environment accessible through a high-resolution HMD. Despite its favorable learning outcomes, their approach is not suitable for classroom applications because of the high cost for building the VR environment and necessity of deploying the VR module for a large number of users. With advances in smartphones and 3D display technologies, the cardboard VR can display panoramic images of virtual scenes at a low cost. Compared with the desktop VR and HMD VR, the cardboard VR is a more suitable approach for classroom teaching. It provides an immersive environment through the VR 360° panoramic technology, easy to set up and operate, and its application is not limited by time or space [
16].
In the recent years, the applications of VR in education have been successful because learners can operate VR devices themselves to explore the learning contents in an immersive environment, and this stimulated their interest in learning and enhanced their learning effectiveness [
17,
18]. Relevant studies on environmental education are summarized as follows. Markowitz et al. [
19] developed an immersive VR system to simulate the ocean acidification process. Without venturing into the deep ocean, participants freely observed and explored in the virtual marine environment. The intervention aroused their interest and helped them acquire knowledge on the effects of ocean acidification. Tarng et al. [
20] established a virtual campus ecological pool, where students could learn about the aquatic organisms through interactive operation. They considered the VR system more interesting than a real ecological pool. The experimental results indicated that the VR system could improve learning motivation and effectiveness. In short, VR simulations may increase the motivation of students more easily in learning abstract concepts.
Given the diversity of wetland ecosystems and the complexity of environmental issues, e.g., environmental impacts by overexploitation, inquiry skills are indispensable as they play an essential role in learning wetland ecology and may often improve the learning outcome effectively. For example, after raising a question for inquiry-based learning, the teacher can ask students to make assumptions, explorations, verifications, inductions, explanations, and discussions to infer the meaning of the knowledge they have obtained for understanding the concepts [
21,
22]. Inquiry-based learning is a learner-centered teaching model in which students are active builders of knowledge. It can cultivate the abilities of observation, posing questions, planning and experimentation, and is therefore suitable for the instructional design in environmental education.
Combining the VR technology with inquiry-based learning to develop a VR system can provide students with suitable learning contexts for applications in environmental education. The interactive user interface enables students to explore autonomously in the virtual ecological environment, observe wetland creatures (e.g., characteristics and habitual behaviors), and initiate induction and discussion. The incorporation of VR exploration into classroom teaching can facilitate a safer and deeper learning situation than on-site teaching while avoiding the damage of wetland ecology and danger to the individual. Such inquiry-based learning is richer in contents, less restricted by weather conditions, and more interesting than conventional teaching methods [
23,
24].
To develop a virtual learning system on wetland ecology that is inexpensive and easy to operate, we used the VR 360° panoramic technology to design the virtual scenes of three wetland areas in northern Taiwan, including (1) Chin Cheng Lake bird-watching area, (2) Hsiang Shan wetland and (3) Shin Feng mangrove forest. Students can conduct inquiry-based learning with cardboard VR to obtain essential information and concepts in wetland ecology. They can explore in the virtual scenes to observe wetland creatures and their habitats as well as characteristics, and complete the challenge mission to learn about wetland ecology and concepts of ecological protection.
The rest of this paper is structured as follows: The next section reviews the crucial articles related to this study. In the “Virtual Wetland Ecological System” section, we describe the methodology of building the 3D panoramic wetland ecological system. In the “Teaching Experiment” section, participants’ learning effectiveness, learning motivation, and learning satisfaction are analyzed. Then, the findings of this study are described in the “Discussion” section. Finally, the conclusions and future works are given at the end of this paper.
3. Virtual Wetland Ecological System
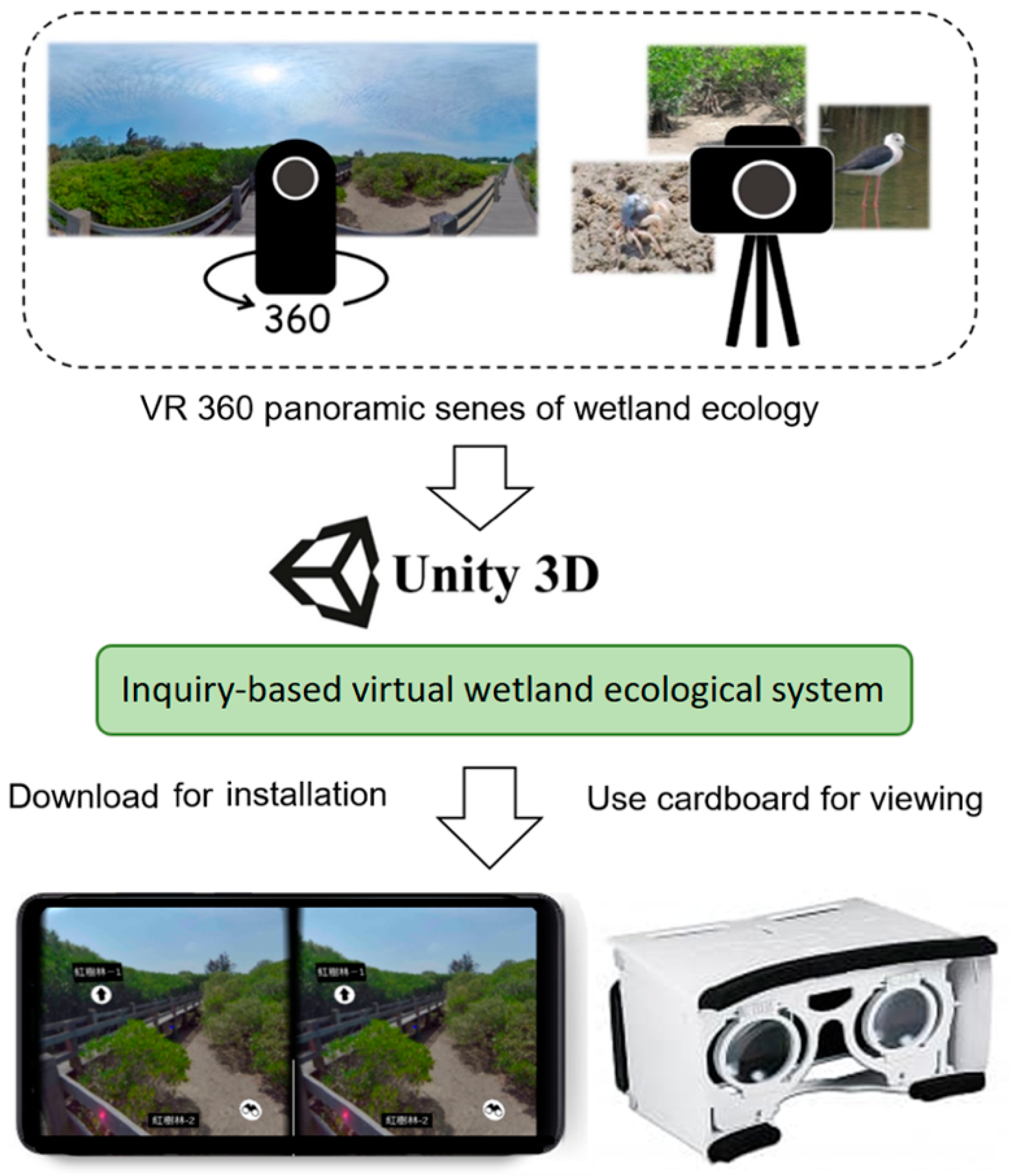
The virtual wetland ecological system is designed using the VR 360° panoramic technology to create the virtual scenes of wetland ecosystems. The user can use a smartphone equipped with cardboard glasses to explore the learning contents of wetland ecology. Such devices are portable, easy to use, low in cost, and able to display panoramic images, allowing the user to conduct observation in the virtual wetland environment with a 360-degree view as if in the real world and use the focus point to trigger the designated events, e.g., observation, transfer, and viewing information. Unlike computer-generated scenes, the 3D panoramic scenes can faithfully present the original appearance of wetland ecology. When applied in classroom teaching, the immersive VR experience is like conducting on-site teaching, and students can observe animals and plants through cardboard VR to learn about wetland knowledge and concepts of ecological protection.
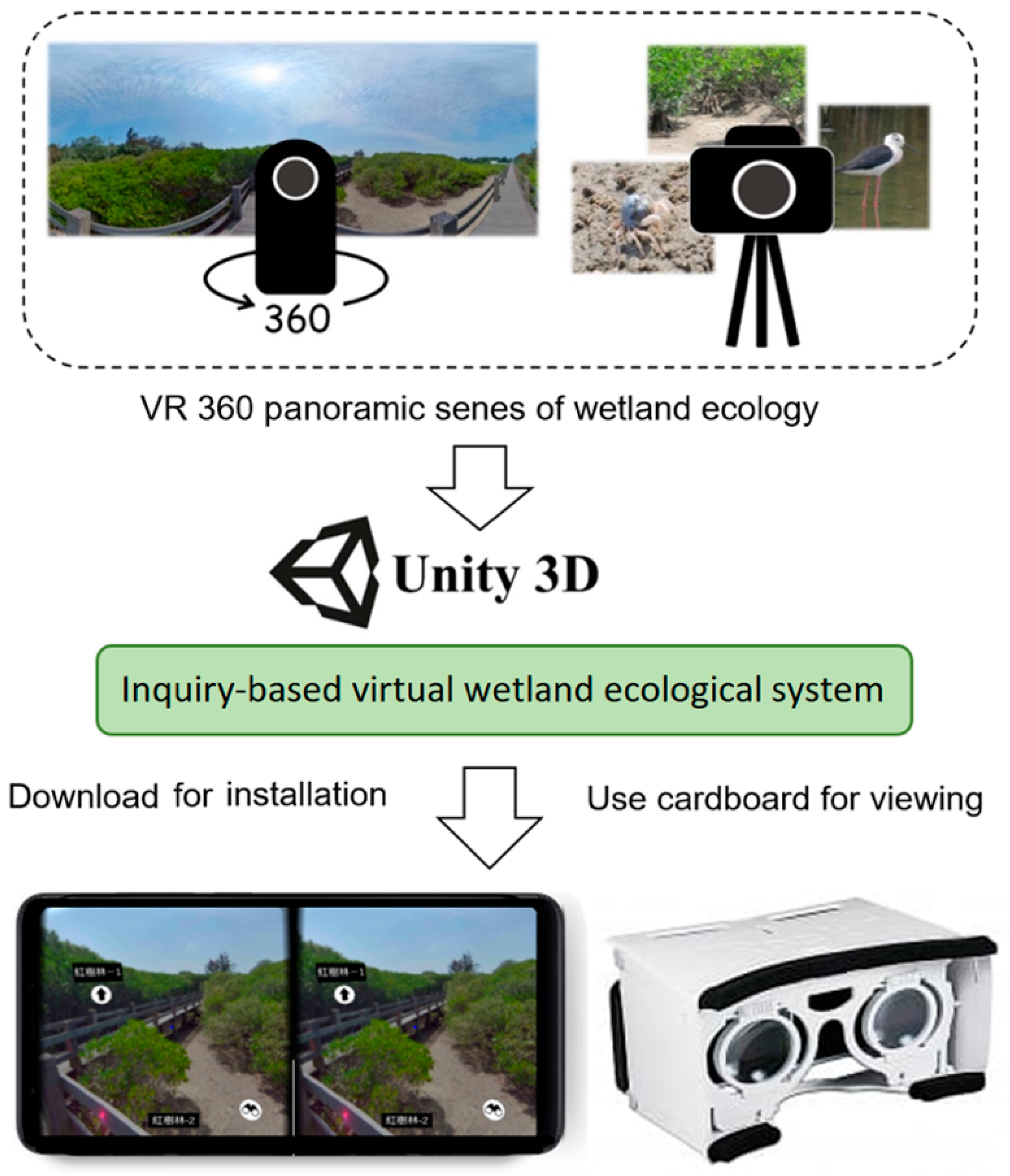
The virtual wetland ecological system is designed as a smartphone-based application (app) by following the development process as shown in
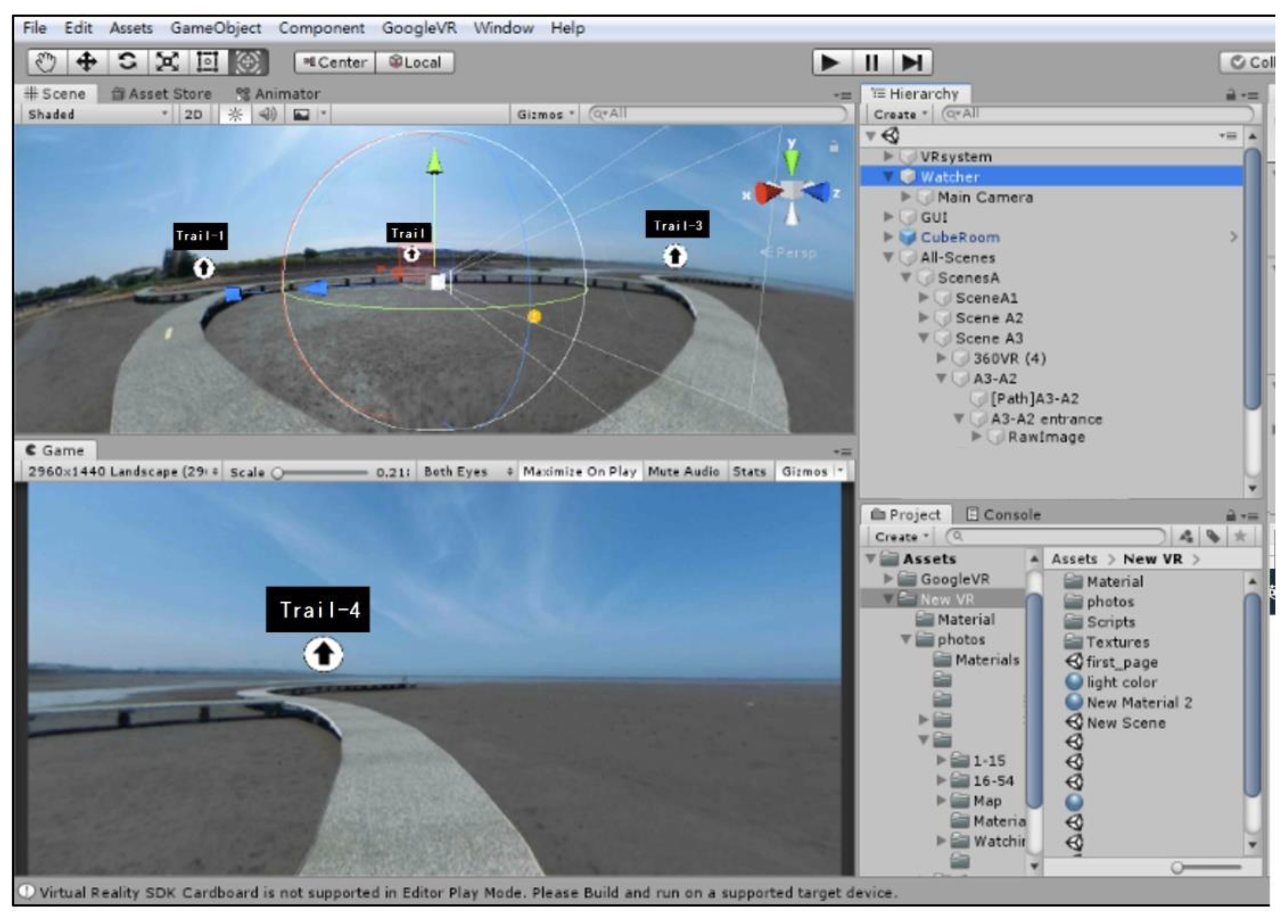
Figure 1. First, the panoramic camera is used to take 3D photographs of wetlands. Then, the ordinary photography equipment is employed to take pictures and videos of wetland plants and animals. After that, Unity 3D is used to design the virtual scenes and add the interactive objects such as road signs and icons. Finally, the user interface for observation and scene transfer is designed (
Figure 2). When the VR system is completed, it can be downloaded and installed on a smartphone with an Android operating system. The app is ready for use if a pair of cardboard glasses is selected as the HMD. Starting the app will divide the screen into two parts for displaying the stereo image pair. The user can put the smartphone in the cardboard compartment and mount it to face for viewing the virtual scene. In cardboard VR, the interaction is achieved by focusing the viewpoint at the built-in icons to trigger the events such as observation, information and moving to another scene.
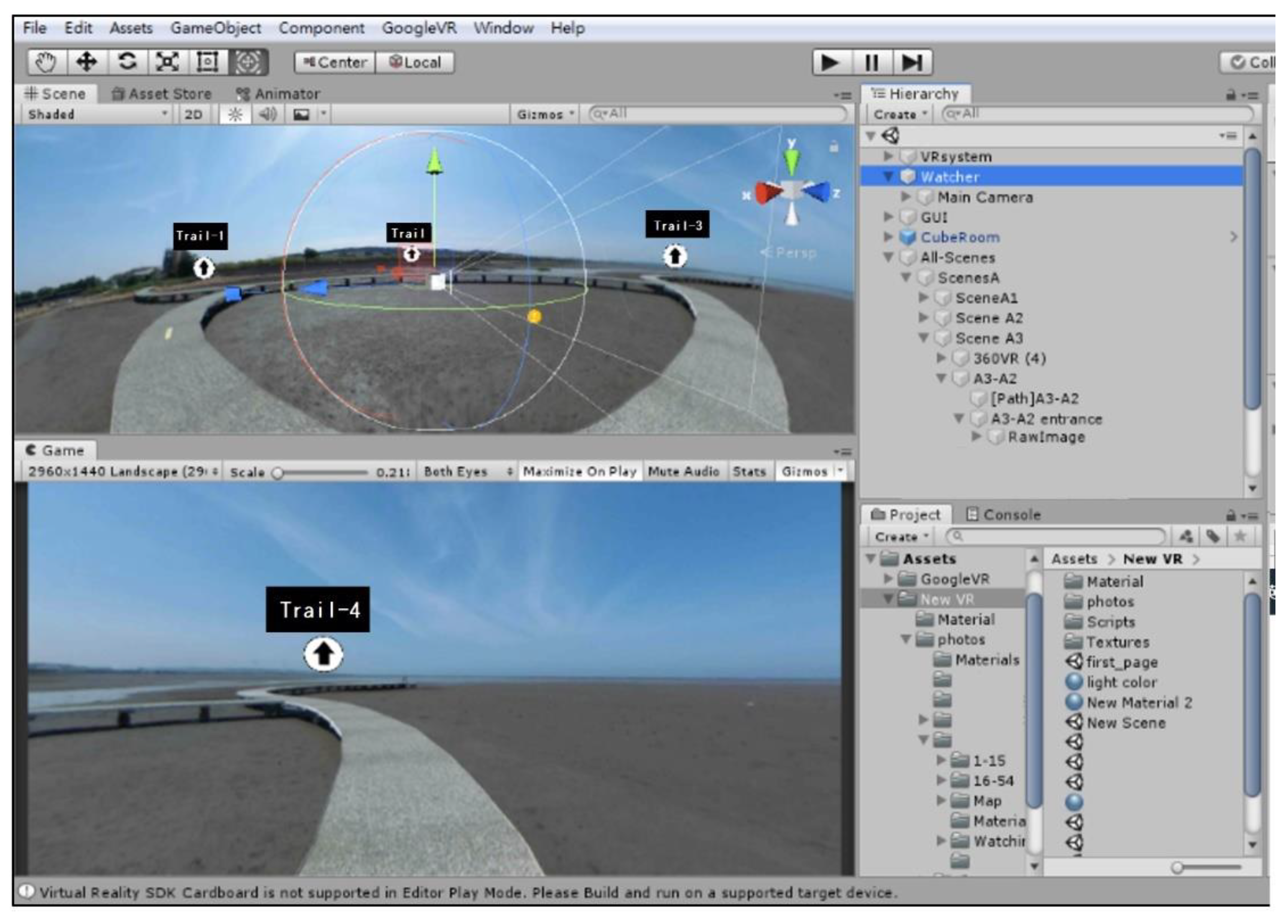
3.1. VR 360° Panoramic Scenes
The virtual wetland ecological system was designed using Unity3D, a cross-platform 2D/3D game engine developed by Unity Technologies, mainly used to design games for the platforms of Windows, MacOS, Linux, iOS, and Android, etc. The virtual scenes and user interface were developed by Unity 3D and the Google VR software development kit (SDK). The C# language was selected in Visual Studio 2017 to develop the interactive programs for triggering events. The panoramic photographs were taken by Ricoh Theta V camera and the images of user interface were drawn by Adobe photoshop. The videos of animals and plants were edited by Adobe Premiere CS6. The development process includes: (1) compilation of learning contents on wetland ecology; (2) preparation of photographs, videos, textual descriptions, and voice quizzes corresponding to different wetland areas; (3) developing the virtual scenes and user interface of the wetland ecological system; (4) exporting the VR system into an app for installation.
A common format of the panorama image is the cylindrical projection, a single rectangular image that wraps 360 degrees horizontally and 180 degrees vertically (
Figure 2). In this study, the panoramic images were captured with Ricoh Theta V camera. One can create the virtual scenes using the 3D mesh of a sphere, and map a panoramic texture to the inside of it. An alternative way is to use the Skybox feature and render the image via a skybox material. The benefits of using the Skybox feature is that there is no need to create any meshes or to write any code at all, but the drawback is that it will typically create a larger texture, making the app size larger. After building a skybox, it is required to create a material for the texture and add the material as the scene’s skybox.
Table 1 summarizes the hardware and software involved in this study and describes the functions of these types of equipment:
In this study, the learning contents of wetland ecology and their creatures, e.g., birds, crabs and plants in Hsinchu coastal area, northern Taiwan, were designed using the panoramic photos and videos of animals and plants as well as textual descriptions about their characteristics, allowing learners to understand the habits and food sources of animals as well as the organs and functions of plants in different wetland ecological environments. Three wetland ecological areas were selected as the learning targets by considering their special landscapes and representative creatures, including (1) Chin Cheng Lake bird-watching area, (2) Hsiang Shan wetland and (3) Shin Feng mangrove forest.
When determining the observation points and learning objects in these wetland areas, the aerial photographs of the three wetland areas were obtained from Google Maps, showing the distribution of trails and the locations of observation points where the pictures and videos of animals and plants were taken. The observation points marked on the aerial photographs also represent the locations where the user can watch the crabs, birds and plants in the virtual scenes of the wetland ecological system.
There are three scenic spots in Chin Cheng Lake bird-watching area: (1) Water pumping station: The pumping station is used to adjust the water level of Chin Cheng Lake and control the opening and closing of the sluice gate. (2) Chin Cheng Lake: The intertidal wetland is used to regulate the water level of the re-claimed land, and the sandbar in the middle of the lagoon becomes a place for birds to inhabit. (3) Memorial monument: The monument is to commemorate Professor Chin Cheng Wang, who died in a traffic accident during the construction of an embankment in his African expedition.
Figure 3 shows the observation points of Chin Cheng Lake bird-watching area, including (A1) Black Sickle, (A2) Heron, (A3) Little Egret, (A4) Common Moorhen (A5) Middle Egret and (A6) Black-wing Stilt. The characteristics and food sources of the creatures in Chin Cheng Lake bird-watching area are listed in
Table 2.
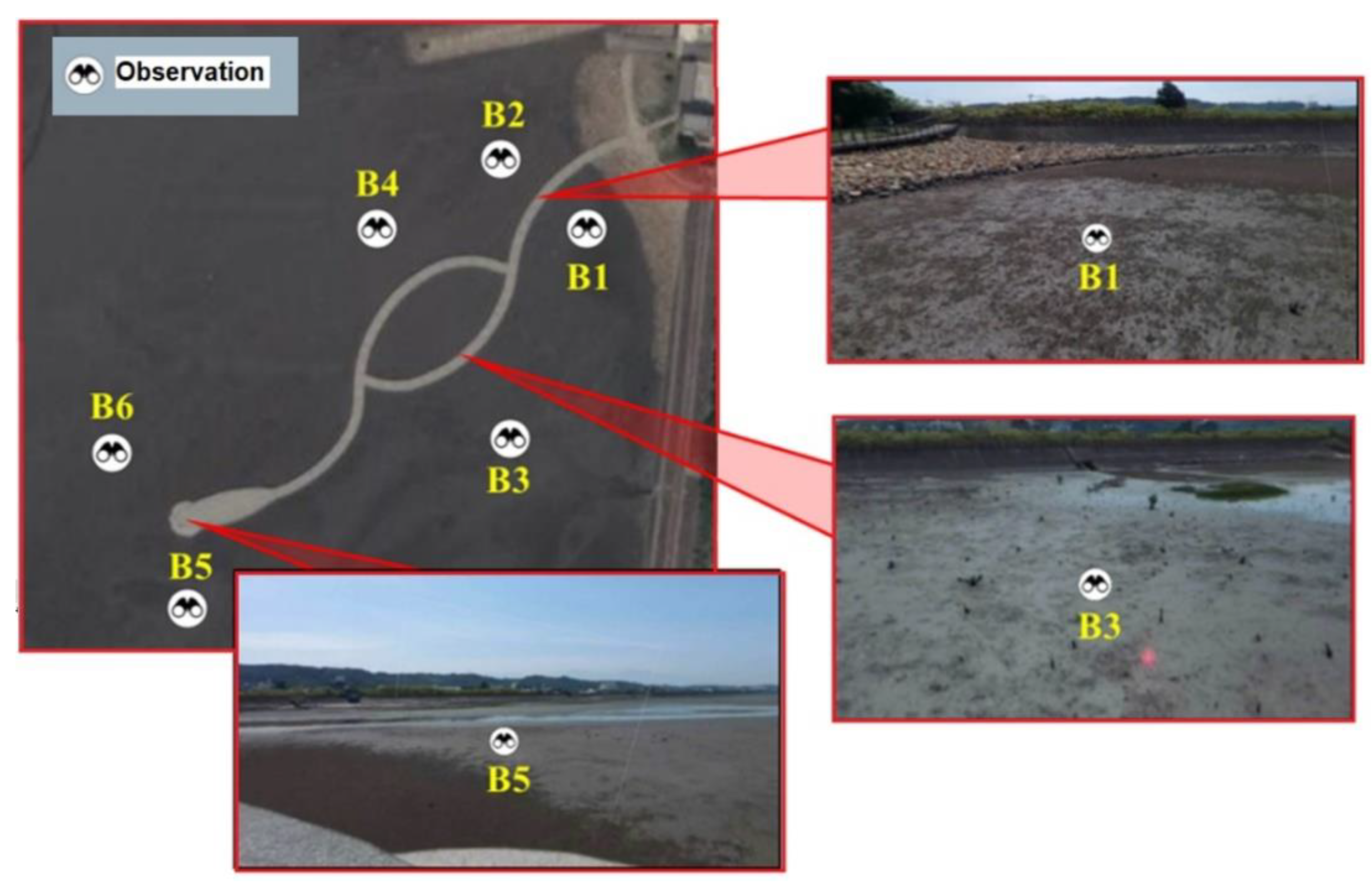
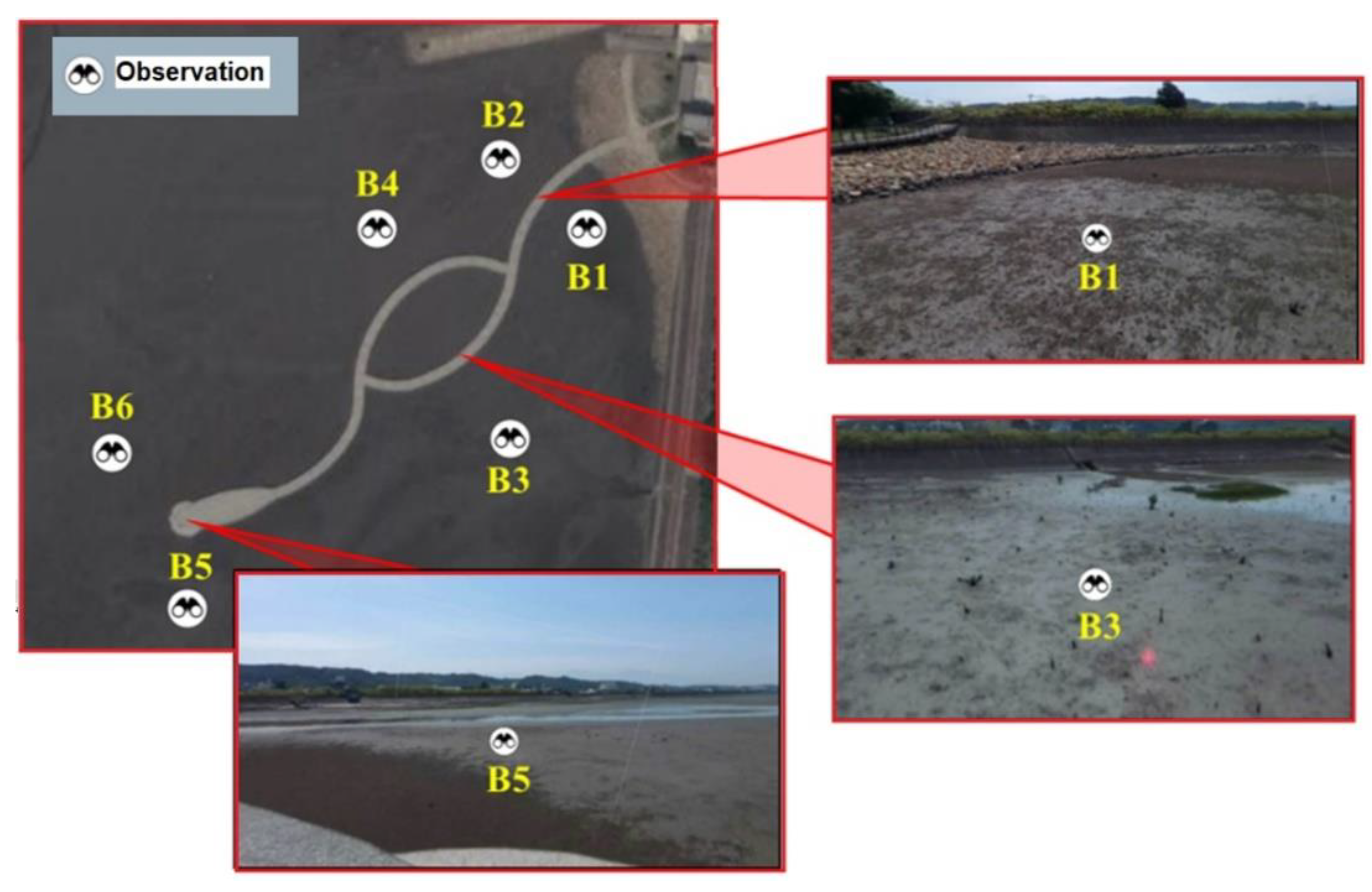
There are three scenic spots in Hsiang Shan wetland: (1) Biological museum: It has a tourist center, an audio-visual classroom, a cafe and landscape areas for visitors to look around. (2) Crab-watching trail: The trail extends about 250 meters from the shore to the sand beach. There is a heart-shaped stone tidal weir, where one can see many intertidal creatures such as crabs and mudskippers. (3) Hsiang Shan wetland: There is a muddy wetland with a variety of crabs inhabiting, and it is a resting place for many birds during migration.
Figure 4 shows the observation points of Hsiang Shan wetland, including (B1) Fiddler Crab, (B2) Milky Fiddler crab, (B3) Sentinel Crab, (B4) Mudskipper, (B5) Short-body Big-eye Crab and (B6) Soldier Crab. The characteristics and food sources of the creatures in Hsiang Shan wetland area are listed in
Table 3.
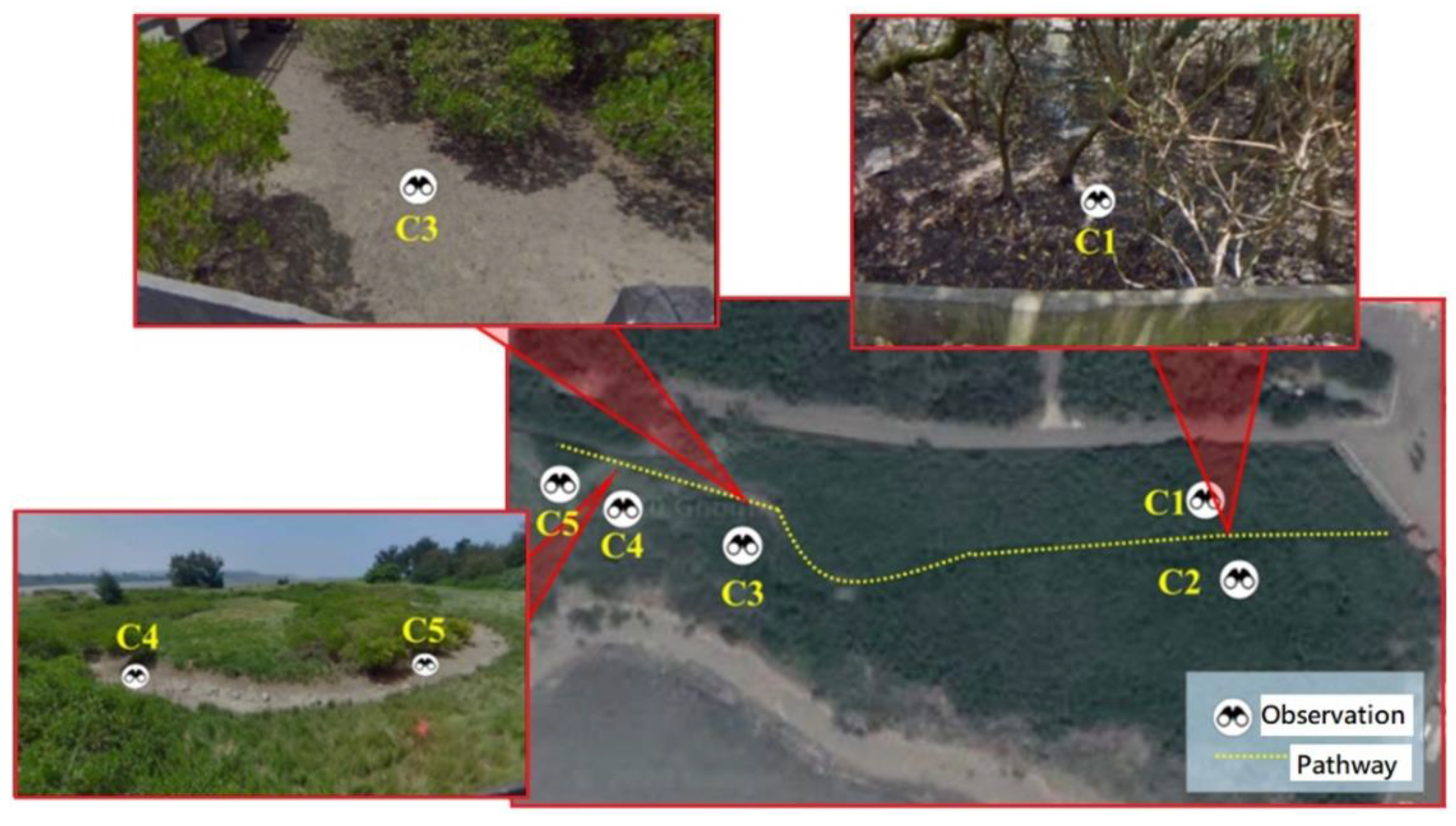
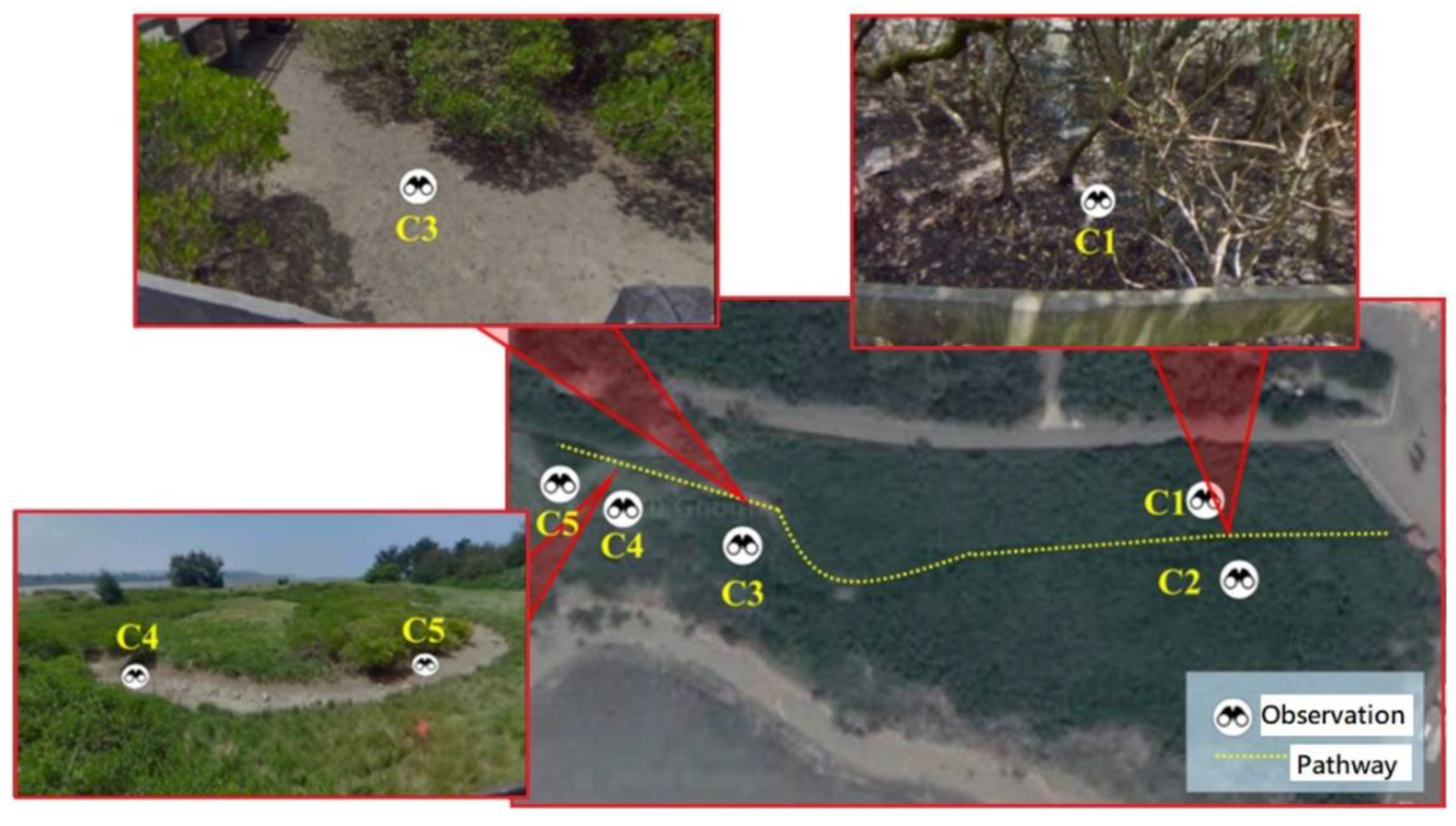
There are two learning topics in Shin Feng mangrove forest: (1) Mangrove forest: The same family of plants are collectively referred to as mangroves. Part of the bark can be refined into red dye, so its bark is called “mangrove bark”. (2) Functions of mangroves: Mangroves are shrubs or trees that grow along tropical and subtropical coasts or at the intersection of the sea and the river. They can serve as a windbreak forest, and also have the functions of setting sand, purifying water, and protecting banks.
Figure 5 shows the observation points of Shin Feng mangrove forest, including (C1) Helicid Crab, (C2) Red-claw Crab, (C3) Seaweed Breath Root, (C4) Mangrove Propagules and (C5) Mangrove Support Root. The characteristics and food sources (crabs) or functions (mangrove) of the creatures in Shin Feng mangrove forest are listed in
Table 4.
3.2. Inquiry-Based Learning with Cardboard VR
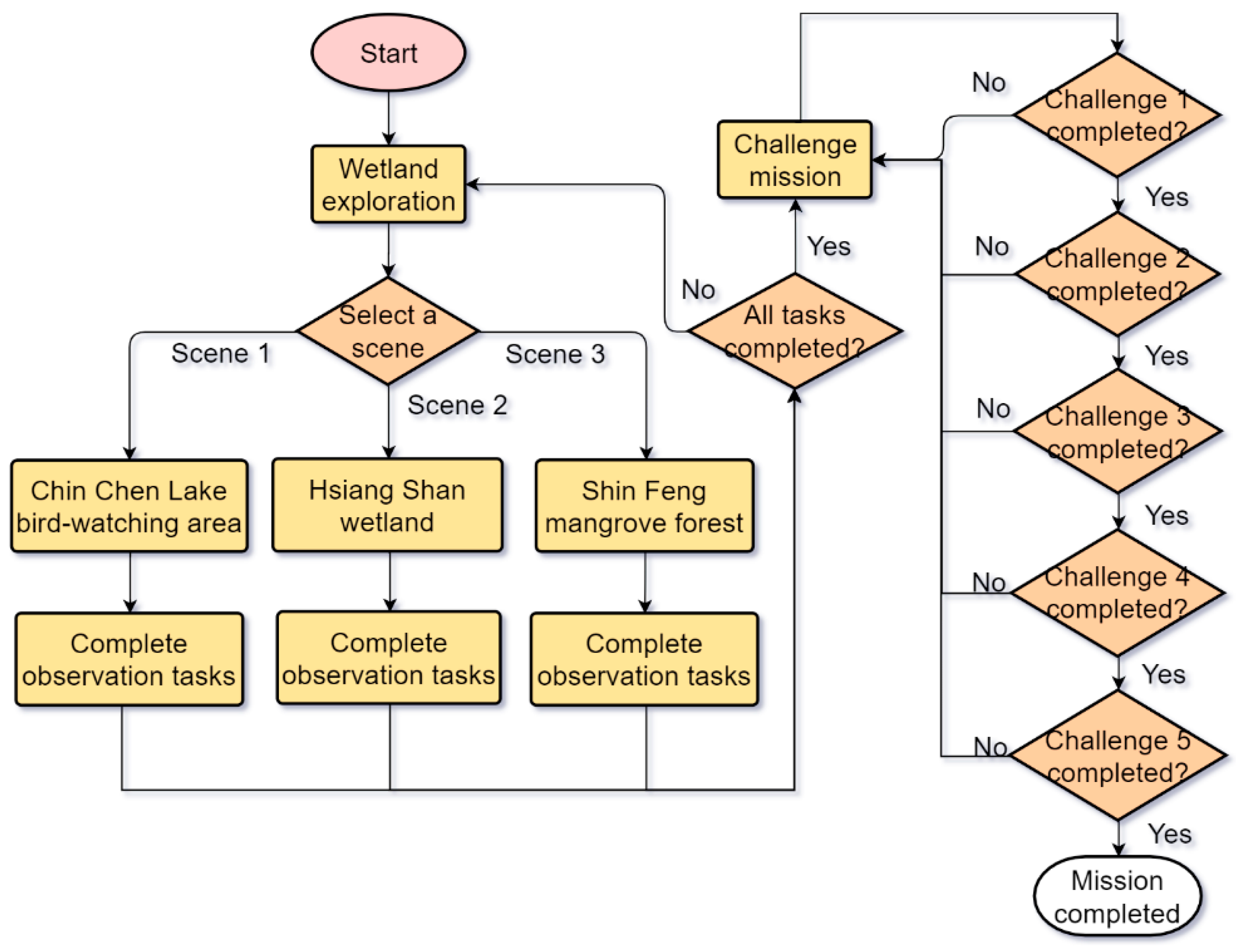
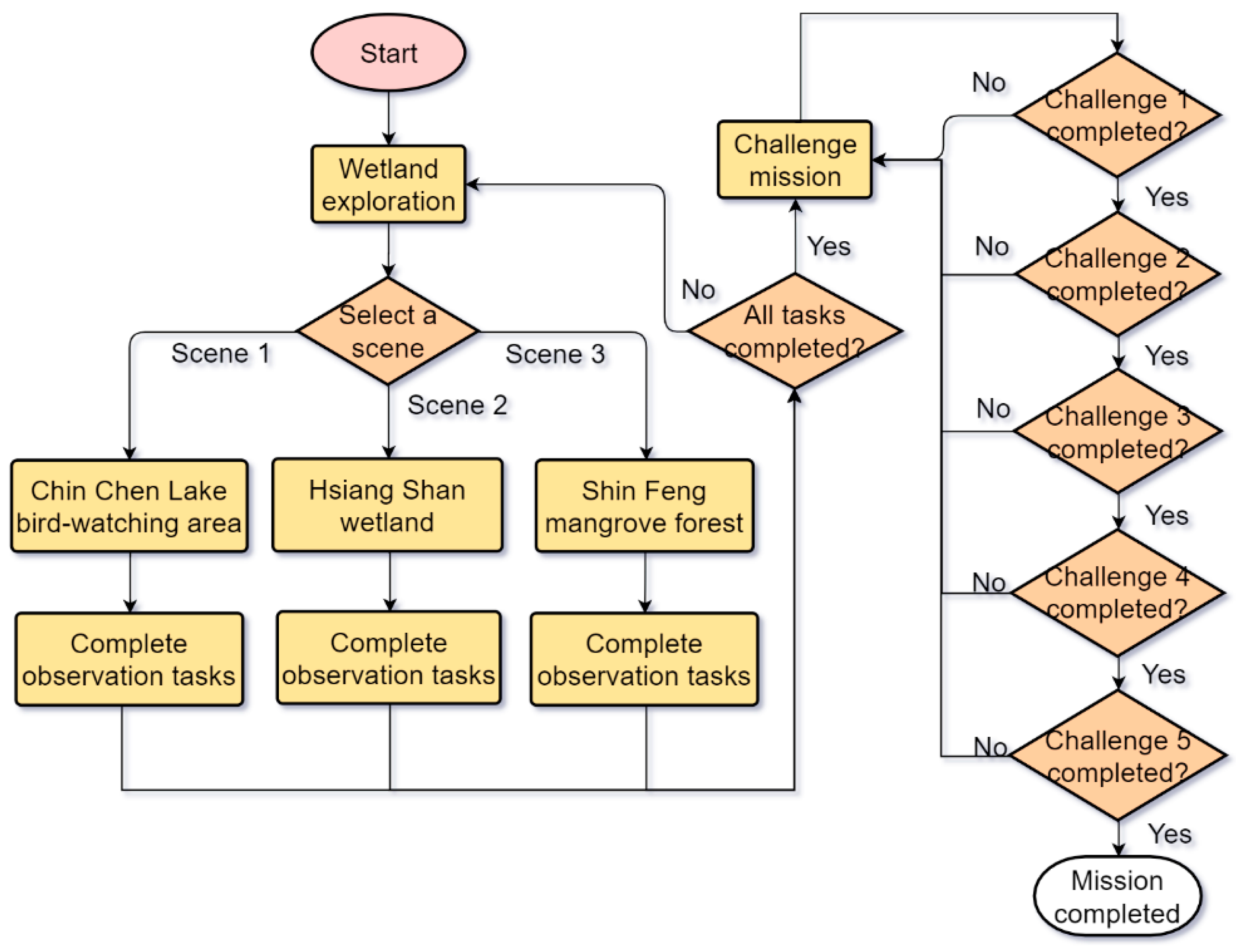
The operating process of the virtual ecological system is exploring the three wetlands and completing all observation tasks (
Figure 6). The user can undergo the challenge mission to answer questions based on the findings of observation. The users must answer all questions correctly to complete the mission, or start again if missing a challenge.
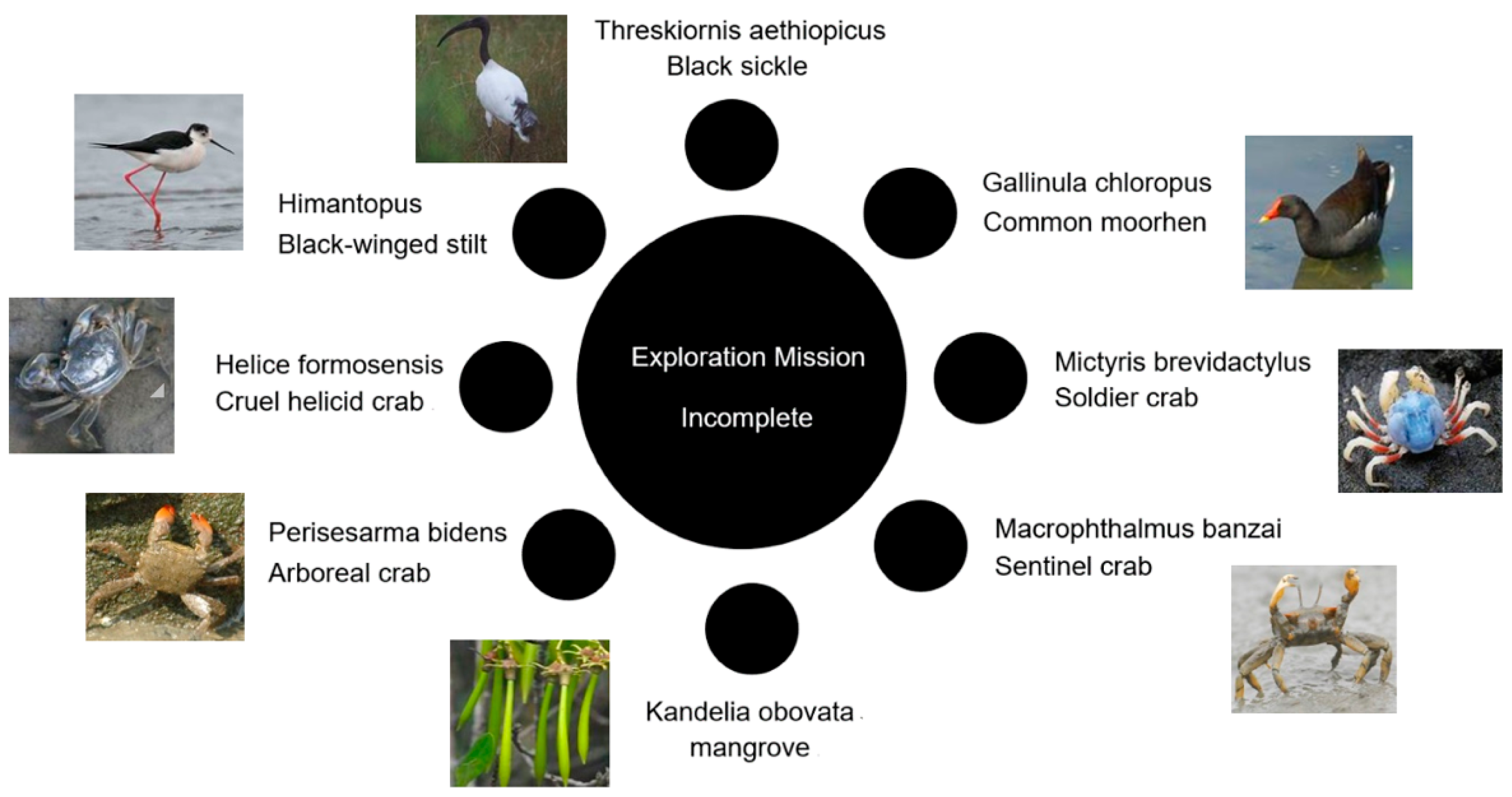
Before the students began exploration in the virtual wetland ecological system, the teacher spent about 10 minutes teaching them how to operate the system and then raised some questions related to wetland ecology for them to make predictions. After conducting a pre-test to examine the background knowledge of wetland ecology, the students were asked to complete eight tasks of finding the designated creatures in the virtual wetland areas (
Figure 7). They had to record the observation results on the worksheets for use in the group discussion. The tasks were named according to the characteristics or habitual behaviors of the wetland creatures, and the students could enter another wetland area to continue exploration after the current tasks were completed.
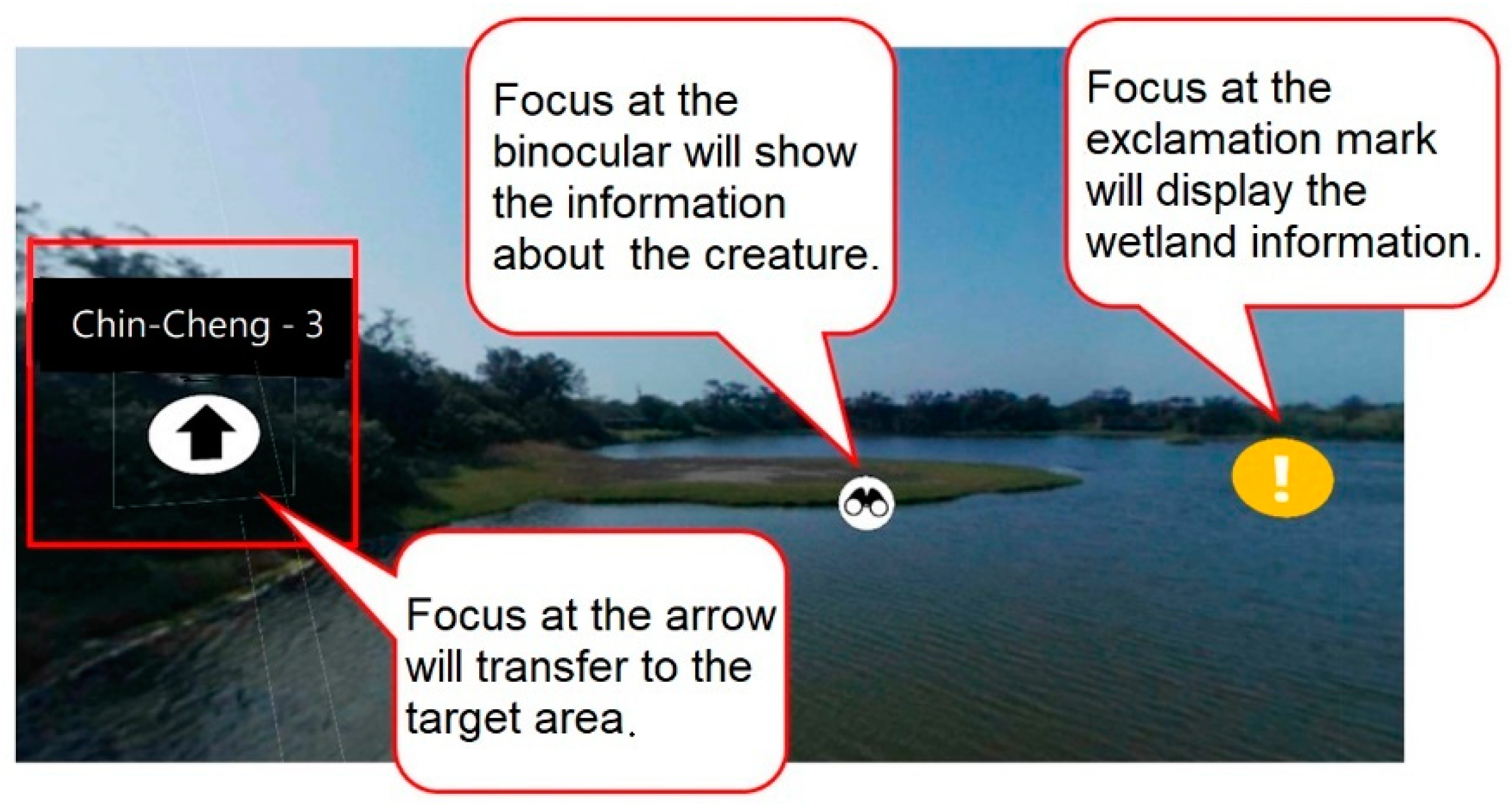
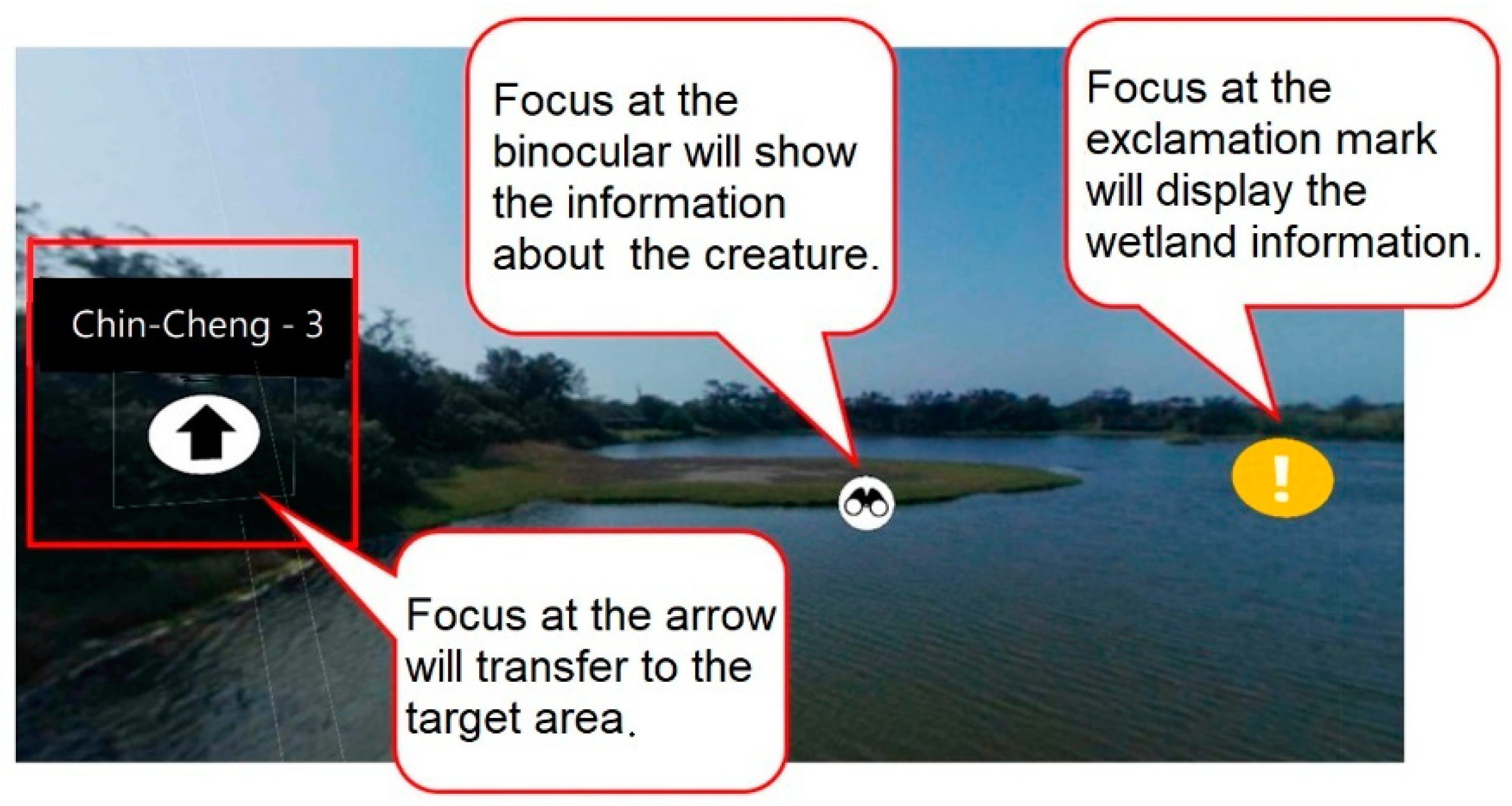
To support inquiry-based learning, the icons in the virtual scenes are designed to trigger certain events. There are several types of icons to trigger different events. Considering the virtual scene of bird-watching area in
Figure 8, the arrow icon on the left can transfer the user to another virtual scene. In the middle, the binocular icon can display the information about the wetland creature under observation, and the exclamation icon on the right can provide information about the wetland ecology. The students could explore freely in the virtual environment, watching photographs and videos of wetland creatures, to obtain information about the wetland ecology. The process was continued until all the exploration tasks listed on their worksheets had been completed.
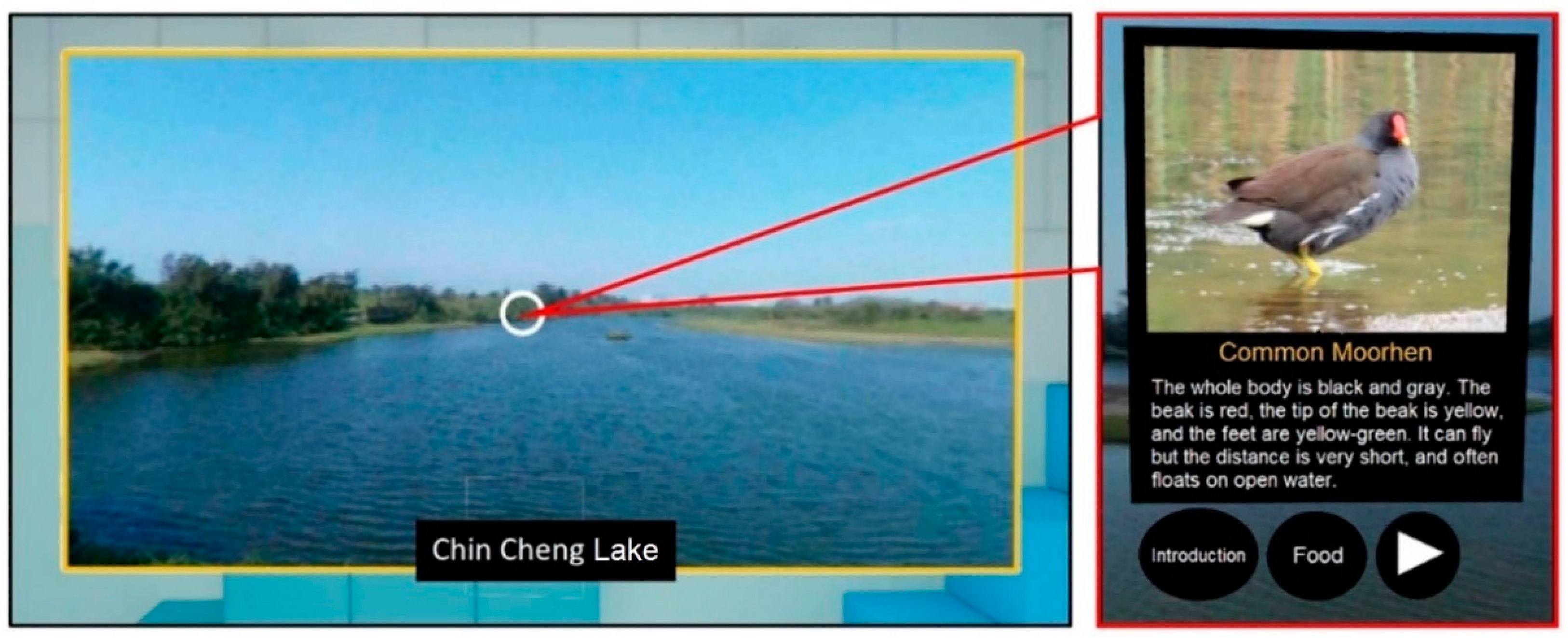
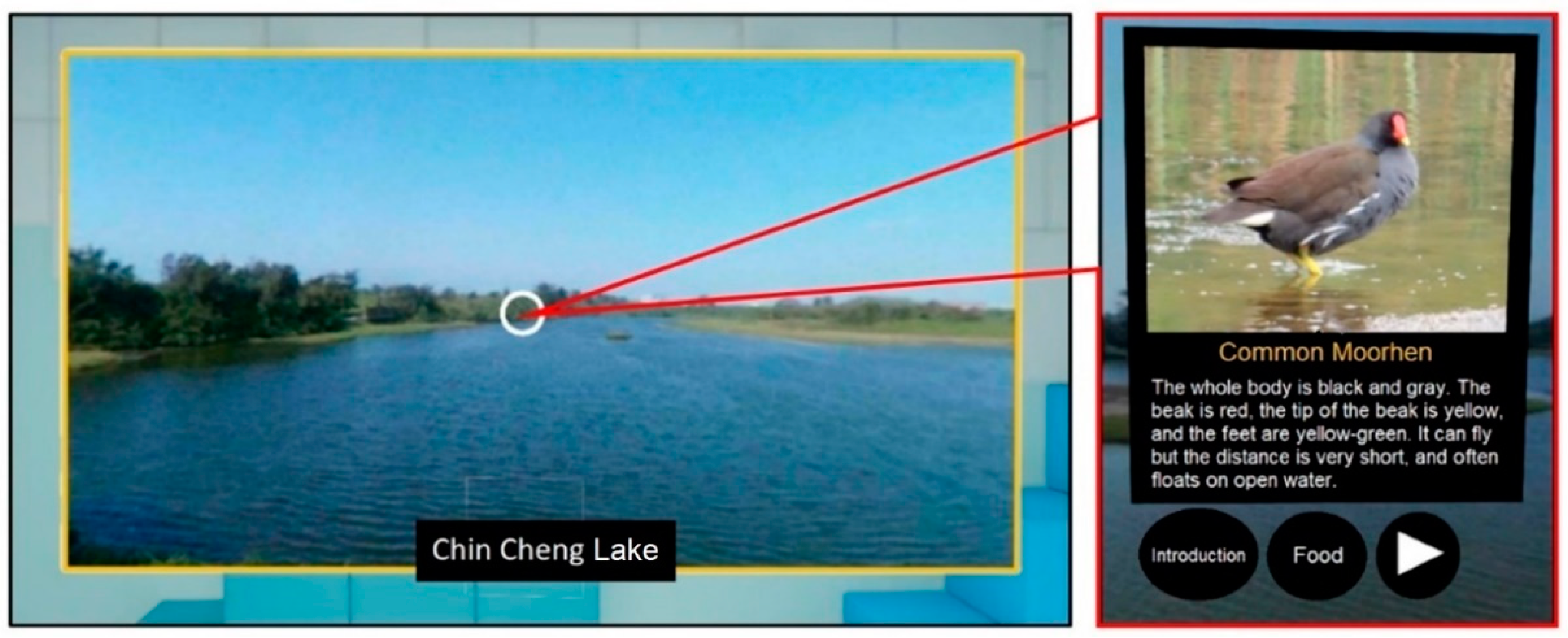
When the students entered the selected virtual scene, they could make an observation or move to another scene by focusing at an icon to trigger the event. The observation task supports inquiry-based learning by hiding some trigger points in the virtual scenes for the user to find out the creatures in an ecological environment according to the provided hints. For example, the common moorhen often floats on open water, so they could search for the common moorhen on the lake. If an observation point appears, the students could focus at the icon to obtain further information (
Figure 9). The pop-up window will show the information and food sources of an animal, and they could focus at the button to play a video showing the habitual behavior of the creature.
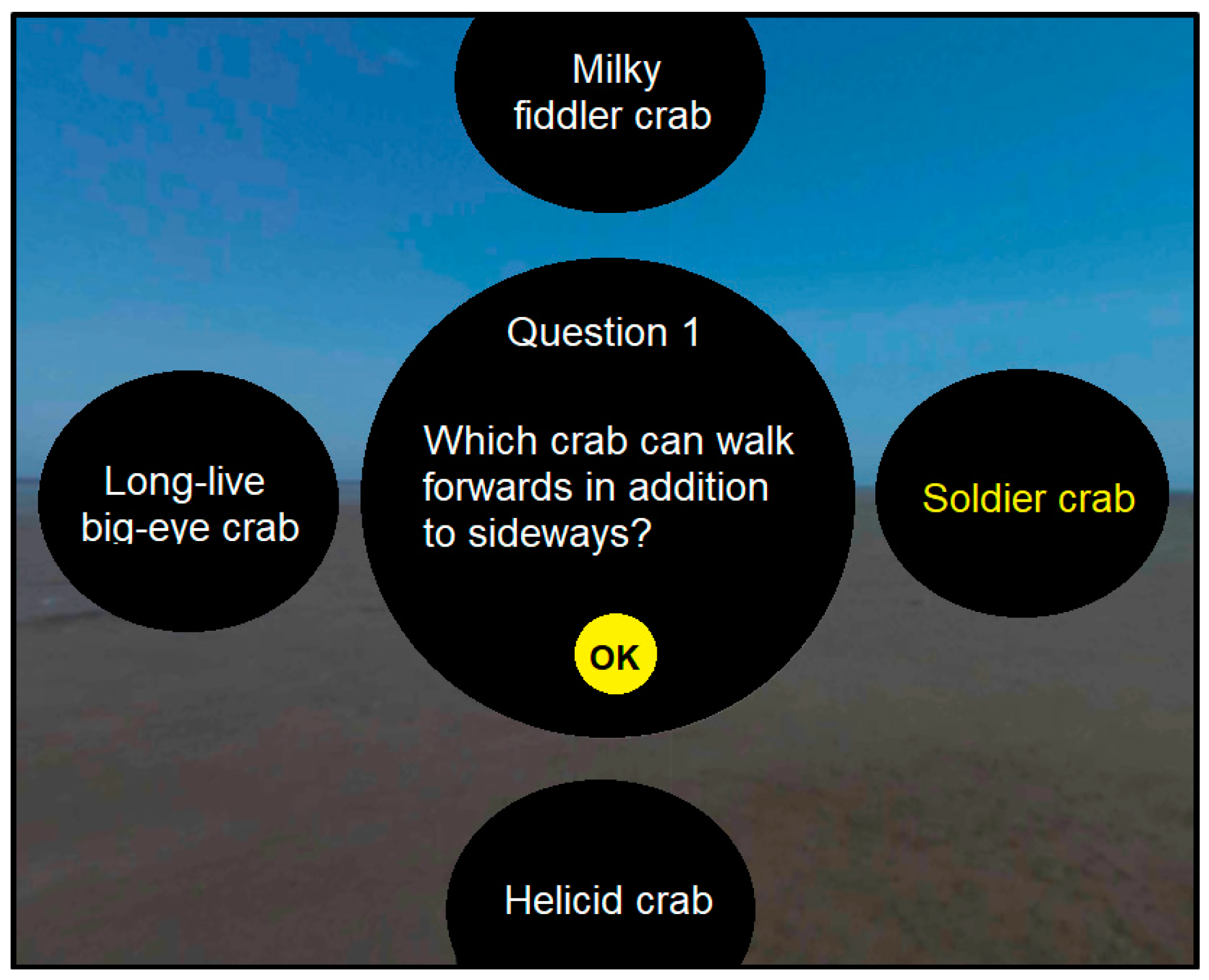
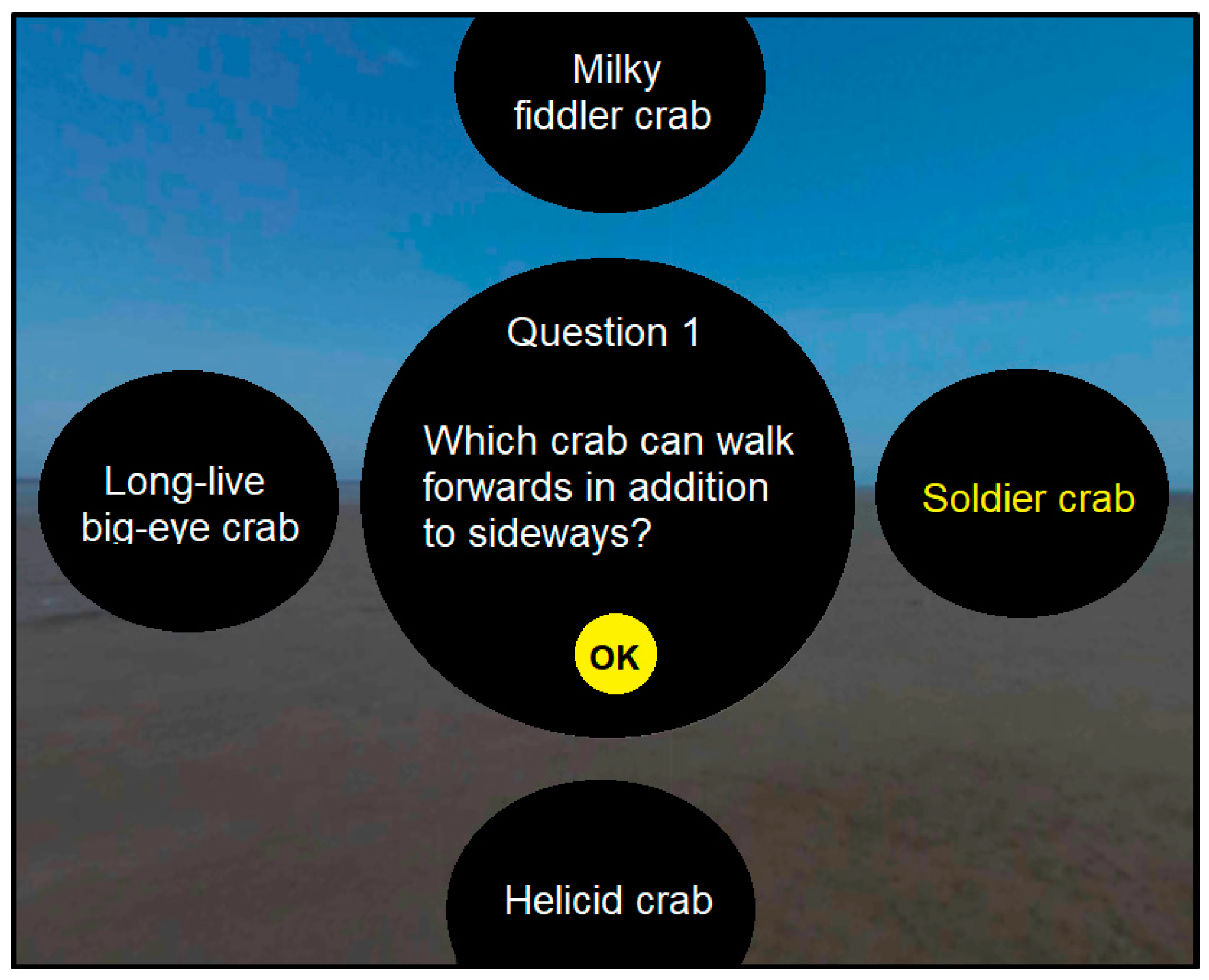
The learning process was proceeded by following the steps specified by the worksheets. After visiting the three wetland areas and completing all observation tasks, students could undergo the challenge mission (
Figure 10). A total of five challenges had to be completed and the questions in each challenge were randomly selected from the learning contents related to a wetland area. To complete the challenge mission, the students had to answer all questions correctly. Otherwise, they were directed to start the challenge mission again. After completing the mission, they were arranged to join the group to discuss and explain the findings during observation to complete the POE process.
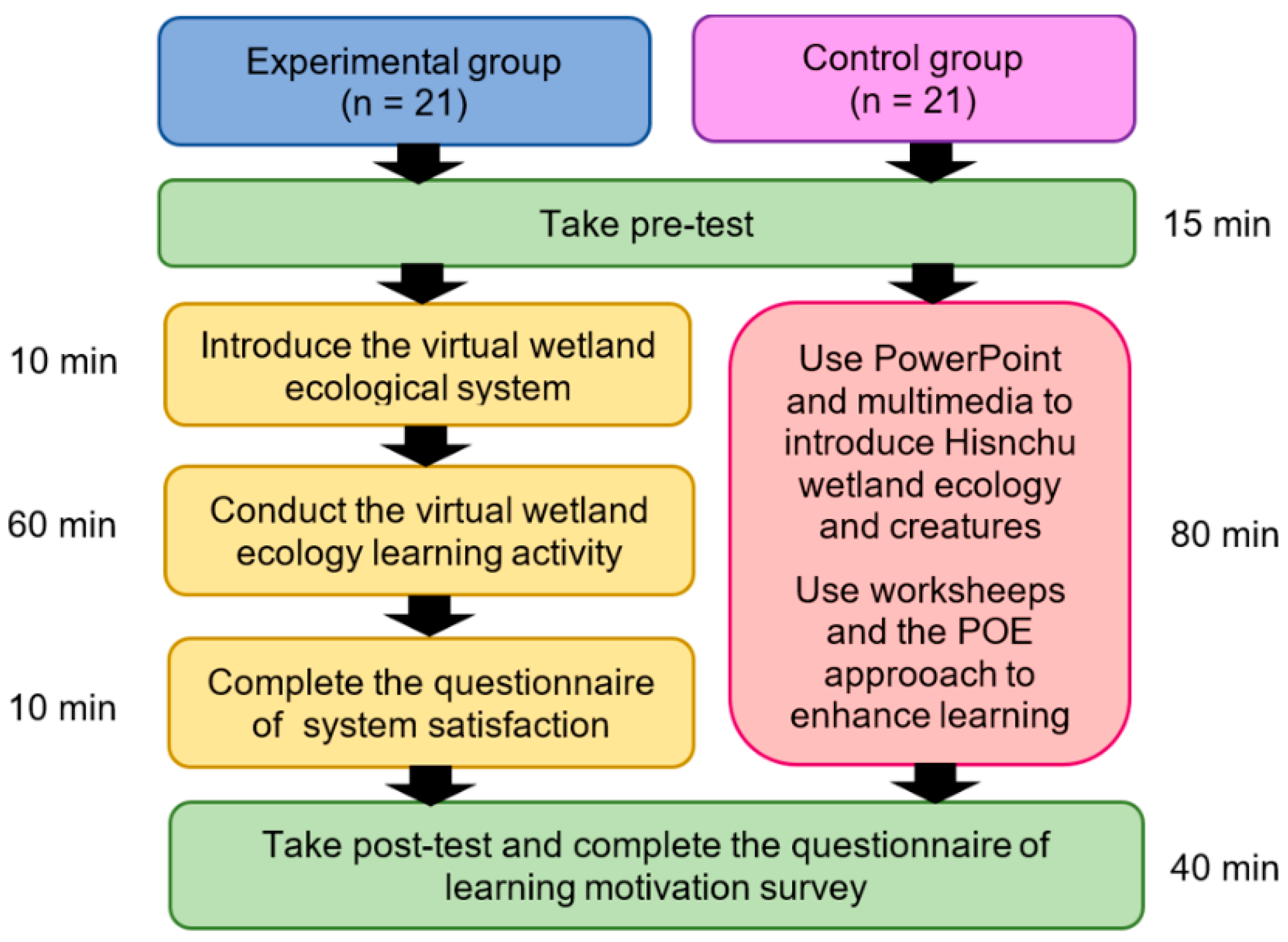
4. Teaching Experiment
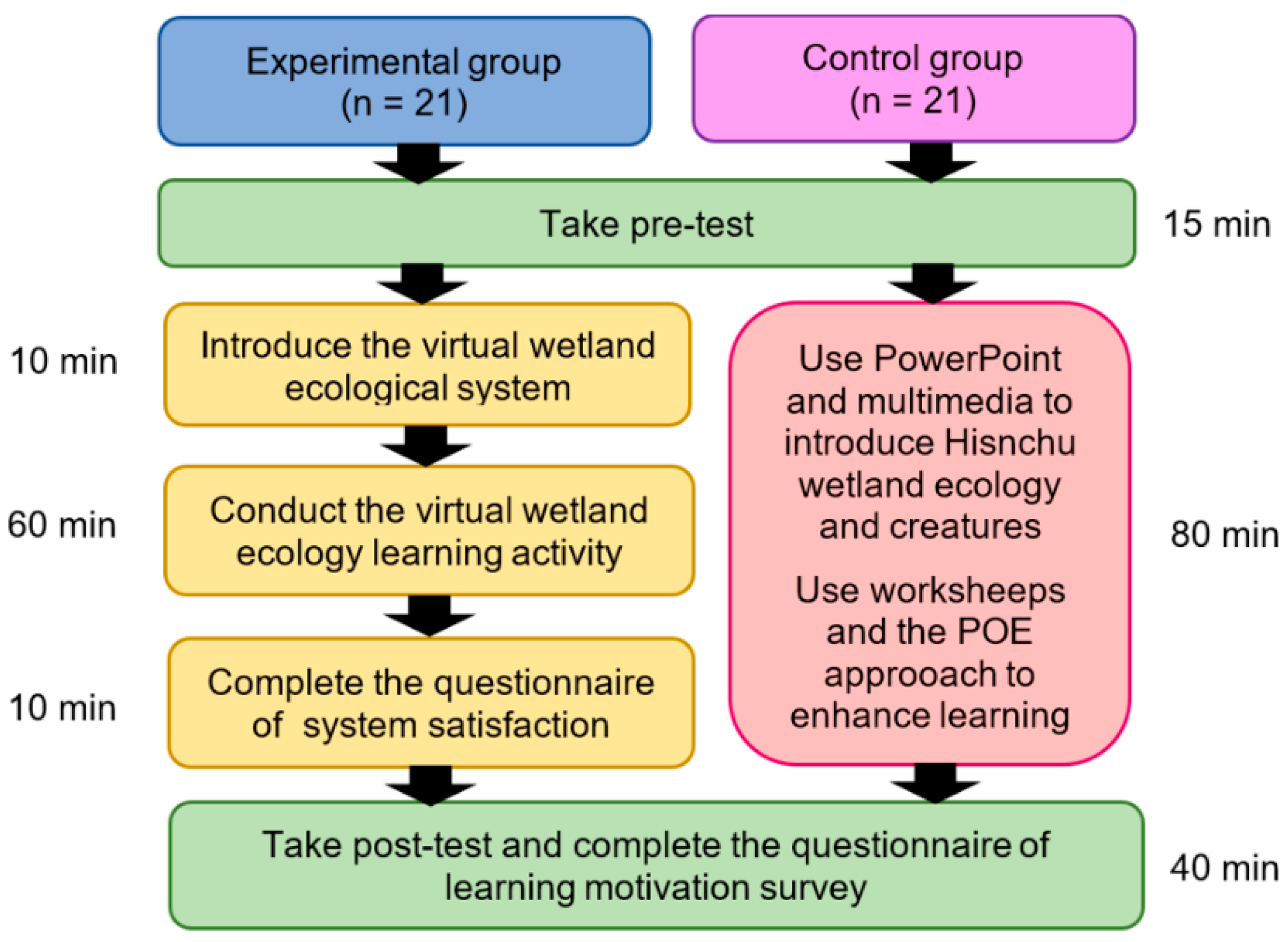
In this study, a teaching experiment was conducted to evaluate the learning effectiveness of the virtual wetland ecological system and the levels of satisfaction after using the system. We recruited 42 seventh graders (24 females and 18 males with ages between 12 to 13) from a junior high school in Pingtung County, southern Taiwan (not within the proximity of wetlands) as participants and divided them evenly into two groups (21 students in each group). All the participants did not have any experience of using AR nor VR equipment before this experiment. A quasi-experimental design was adopted. The experimental group used the VR system for learning and the control group used conventional teaching materials, respectively. The POE strategy and inquiry-based learning approach were implemented in the learning activities for both groups. The learning effectiveness and learning motivation were assessed using a wetland ecology achievement test (including pre-test and post-test) and a learning motivation scale. In addition, a system satisfaction questionnaire survey was conducted to understand the acceptance of the VR system by the experimental group (
Figure 11).
According to the POE strategy, the learning process was divided into three stages. Before the interventions, the observation tasks, cause of wetland destruction and current enactments of wetland protection were explained to the students. Subsequently, a pre-test was performed to examine their background knowledge on wetland ecology. In the first stage, students were asked to predict the problems they would encounter in wetland environments. In the second stage, the control group was given multimedia teaching materials while the experimental group was instructed to use the VR system to perform observation tasks (
Figure 12). The learning contents were related to the characteristics, habitats and food sources of wetland animals as well as the organs and functions of wetland plants. In the third stage, the students completed the post-test on wetland ecology after the group discussion by sharing their findings during observations and comparing their worksheets for correct solutions. In the teaching experiment, both groups were instructed by the same teacher for the same amount of time to ensure consistency and prevent learning outcomes from being affected by different teaching styles.
4.1. Learning Effectiveness
The performance of the VR system on learning achievements was evaluated in the context of environmental education by analyzing the difference between the pre-test and post-test (Cronbach’s α = 0.70) scores for each group through descriptive statistics. As shown in
Table 5, the post-test score of the experimental group is higher than that of the control group, and the standard deviation of the experimental group is smaller than that of the control group, indicating the post-test score of the experimental group is distributed more concentrated. The paired-sample t-test results reveal significant differences between the pre-test and post-test scores for the experimental group (
t = −13.26 and
p < 0.001) and the control group (
t = −8.41 and
p < 0.001). The results suggest that the participants obtained knowledge on wetland ecology effectively through both types of teaching methods.
To further determine if two groups had a significant difference in learning achievements, a one-way analysis of covariance (ANCOVA) is conducted by using the pre-test score as the covariate, the learning method as the independent variable, and the post-test score as the dependent variable. As shown in
Table 6, the between-group difference is significant with F = 14.45 and
p < 0.001, indicating a significant difference in progress between the two groups because different teaching tools were used.
It is inferred that the virtual wetland ecological system facilitated the experimental group to observe wetland creatures in the VR environments, enabling the acquisition of knowledge on wetland biology and leaving a deep impression after autonomous exploration. Therefore, combination of cardboard VR with inquiry-based learning could enhance the learning effectiveness on wetland ecology in this intervention.
4.2. Learning Motivation
The between-group differences in learning motivation after the interventions were examined using a 5-point Likert scale, with “strongly disagree” and “strongly agree” corresponding to 1 and 5 points, respectively. An expert in the study area of wetland ecology reviewed the questionnaire for examining its validity, and the Cronbach’s α = 0.93, showing a high reliability. The mean score and standard deviation for each question were analyzed through an independent sample
t-test to analyze if there were significant differences in learning motivation about wetland ecology between the two groups due to the use of different learning tools (
Table 7).
According to the questionnaire results, the mean scores of the experimental group for all questions were higher than those of the control group. About two-thirds of the questions received an average score higher than four, between the responses of agree and strongly agree. Only the means of questions 3, 5, 8, 9, and 12 were slightly less than four. A possible reason was that participants in the experimental group did not know how to use the VR system at the beginning and therefore they needed the teacher’s assistance (question 3). During the exploration tasks, some students focused on completing their worksheets and therefore seldom took off the cardboard glasses to discuss with others (question 5 and 9). After the class, some students realized that wetland ecology was very interesting, but they did not know how to learn or tell others about it (question 8 and 12). From the significant differences on questions 6 and 10, it can be inferred that the experimental group was able to observe the virtual wetlands and thus found it easier to learn. This also explains why the experimental group developed a greater interest in acquiring further knowledge on wetland ecology (questions 2, 11 and 12).
The results of independent sample
t-test (
Table 8) show the difference of learning motivation between the two groups. The mean (SD) of the experimental group is 53.24 (9.85), whereas the mean (SD) of the control group is 43.24 (10.33). The learning motivation of the experimental group was higher than that of the control group. The
t-test results (
t = −3.21 and
p = 0.003 < 0.01) reveal that the combination of cardboard VR with inquiry-based learning was effective in stimulating learning motivation. Different from that of conventional teaching, the presentation of learning contents in the VR system increased the interest and willingness of students in exploring the knowledge of wetland ecology.
4.3. System Satisfaction
The system satisfaction was measured through a questionnaire survey, including 15 questions divided into three dimensions, i.e., interface design, learning content, and operating experience (
Table 9). Each dimension contains five questions, evaluated by a 5-point Likert scale. The purpose of the questionnaire was to understand participants’ learning experience and collect their feedback on the VR system. The questionnaire has a high reliability with Cronbach’s α = 0.88. The results could be used as a reference for future improvement on the system design. The mean scores of most questions exceeded four points, indicating the levels of satisfaction mainly fall between “satisfied” and “highly satisfied”. The dimensional means of the interface design, learning contents, and operating experience (4.36, 4.31, and 4.15, respectively) all exceed four points, and the average score of overall satisfaction is 4.27, revealing most participants were satisfied with the experience of exploring the virtual wetland environments using the VR system.
Among all dimensions, only Question 12 (“I think this system is smooth and pleasant to use for ecological observation, including the transfer between scenes”) and Question 13 (“I did not feel dizzy when exploring the wetland environments”) had mean scores lower than four points. This is attributable to some participants’ reports of experiencing occasional physical discomfort when wearing cardboard glasses, specifically, the symptoms of dizziness and nausea resulting from motion sickness [
55].
5. Discussion
According to the experimental results, students in both groups made significant progress in learning the knowledge of wetland ecology, indicating both the VR system and the traditional teaching method could improve their learning achievements. However, the ANCOVA results showed a significant difference between the progress of the two groups, and the experimental group performed better than the control group, indicating the VR system was more effective than the multimedia teaching materials because the former provided a virtual ecological environment where the learners could explore and observe wetland creatures to enhance the learning effectiveness. The results are the same as those reported in [
20,
40,
41], showing that learners had better cognition, attention, and critical thinking in virtual learning environments to improve learning outcomes [
32].
The questionnaire results indicated a significant difference in learning motivation between the two groups. The learning motivation for the experimental group was higher than that of the control group because the observation tasks in the VR system supported inquiry-based learning by hiding trigger points in the virtual scenes for learners to discover the creatures in an ecological environment according to their habitat information. It is more interesting than watching the pictures and videos of wetland ecology. The results are similar to those obtained in [
16], indicating the immersive cardboard VR can provide positive educational experiences while reducing simulator sickness. The results also supported the findings in [
11,
19,
42] because learners could conduct autonomous exploration in the virtual ecological environments and complete the challenge mission to obtain the knowledge about wetland ecology. Consequently, the learning motivation, critical thinking ability and creativity were higher than those receiving the conventional instruction, showing the VR 360° technology is suitable for environmental education.
The costs of cardboard VR devices are less than $20, much lower than that of the HMD. The users only need a smartphone, cardboard glasses and the VR system app for learning. In general, an HMD, including a fully immersive VR headset and a controller, costs more than $500, and the highly immersive VR application requires a lot of computing power compared to the cardboard VR devices. Besides, the HMD user needs a computer with powerful CPU and graphics card to execute the VR software. Despite the increasing popularity and applications, the immersive VR still has some drawbacks and limitations. For example, the heavy HMD equipment and VR motion sickness may affect the willingness of using VR software. Furthermore, when the users are wearing a VR device, they cannot see the surroundings and the lack of vision may cause an accident.
In summary, this study developed a cardboard VR application for students to learn wetland ecology; it has several advantages over other VR systems, including:
Low costs: Student have opportunities to learn with smartphones; therefore, they can observe the creatures of wetland ecological environments easily.
Easy to use: The light-weighted cardboard glasses allow students to be immersed in the virtual environment without wearing heavy HMD devices.
Ubiquity: Students can join the learning activities in a classroom or at home without computers or Wi-Fi connection.
Moreover, this study employed an inquiry-based learning approach and VR 360° panoramic technology for applications in environmental education. These innovative solutions supported students to observe the real scenarios of wetland ecology without damaging natural environments or causing danger to the individual. Meanwhile, an interactive user interface was designed for students to trigger the events in the virtual scenes. With the help of VR 360° virtual wetland ecological applications, students could learn by following the steps of POE strategy individually, and the learning outcomes, motivation, and satisfaction were better than those of traditional POE with worksheets only.
6. Conclusions and Future Works
Many wetlands are disappearing because of overdevelopment, corruption, and failure to enforce environment laws. To prevent further damage to these valuable ecosystems by protecting them and enabling their sustainable development, it is important that more people must learn the importance of wetland ecosystems. Environmental education plays an essential role in this context, particularly in formal education, to conserve the wetland ecosystems. How to increase students’ learning motivation and learning effectiveness still remains a tough challenge for educators to overcome. The application of VR technology in environmental education can enable the integration of conventional teaching strategies with immersive environments to simulate real-world situations. In this study, the VR 360° panoramic technology was combined with the inquiry-based learning approach to develop a virtual wetland ecological system for learners to obtain the knowledge of wetland ecology and concepts of environmental protection.
6.1. Research Findings
A teaching experiment was conducted to evaluate the performance of the VR system, and the learning contents included wetland ecology and characteristics of creatures. We recruited 42 seventh graders as participants from a junior high school, not within the proximity of wetlands. The participants completed the pre-test and post-test before and after the interventions as well as the motivation scale and satisfaction questionnaire to evaluate the learning effectiveness, learning motivation and user satisfaction after using the VR system. The experimental results are listed as follows:
- (1)
The combination of virtual wetland ecology with inquiry-based learning was effective in enhancing learning achievements.
The experimental results revealed that the inquiry-based learning approach could enhance the learning achievements of experimental group and control group. According to the ANCOVA results, the effectiveness of the former is significantly higher than that of the latter, confirming the combination of inquiry-based learning with the VR system is more effective than that with the conventional multimedia.
- (2)
The combination of the VR 360° panoramic technology with inquiry-based learning was effective in increasing learning motivation.
According to the questionnaire results, the scores of the experimental group in each question were higher than those of the control group, especially the stimulation of interesting learning and motivation in the exploration of wetland information. However, it is worth to note that some participants in the experimental group could only express their opinions or engage in discussion with peers when conducting the observation activities because it was difficult to do so while wearing the cardboard glasses. This problem requires special attention in the design of future interventions.
- (3)
Participants were satisfied with the virtual wetland ecological system.
The system presents the panoramic scenes of real wetland environments for learners to explore autonomously. The advantages include a lower cost and easier operation. During the teaching experiment, each participant could use cardboard glasses for inquiry-based learning. Except for some participants who felt slightly dizzy while using the VR system, the others were mainly satisfied with its performance. The average scores for the dimensions of interface design, learning contents, and operating experience are 4.36, 4.31, and 4.15, respectively, and the overall average score of the VR system is 4.27, indicating most participants were satisfied with its usefulness and ease of use.
In summary, the virtual wetland ecological system is easy to use and useful in learning wetland ecology. Exploration and interaction with cardboard VR can help increase learning motivation and learning effectiveness. Therefore, it is a suitable tool for the promotion of environmental education in the context of formal education.
6.2. Future Works
The inquiry-based learning approach on VR systems can be applied to other courses, and our future works include the extension of educational applications to:
- (1)
Learning space and time concepts in special theory of relativity.
The students can take a spacecraft approaching the light speed to travel in the universe and witness the phenomenon of “Moving rulers are shorter” and “Moving clocks run slow” as well as discover the oncoming spacecraft is moving only closer to instead of faster than the light speed. Virtual reality can concretize and visualize the space-time concepts by allowing learners to control the speed of the spacecraft to observe the change of time and length in different coordinate systems, which is helpful for understanding the abstract concepts in the special theory of relativity.
- (2)
VR experimental systems for learning optics and electric circuits.
The students can use the concave lens, convex lens and a candlestick in the VR optical system to observe how the image of a candlestick is projected to the screen and the change of its size by adjusting the position of the candlestick from inside to outside of the focal length. They can also conduct an electric-circuit experiment using the VR circuit system to measure the current and voltage using the elements of batteries, wires, resistors and light bulbs for the cases of parallel and serial connections.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}