An Examination of Soil Moisture Estimation Using Ground Penetrating Radar in Desert Steppe



Abstract
1. Introduction
2. Materials and Methods
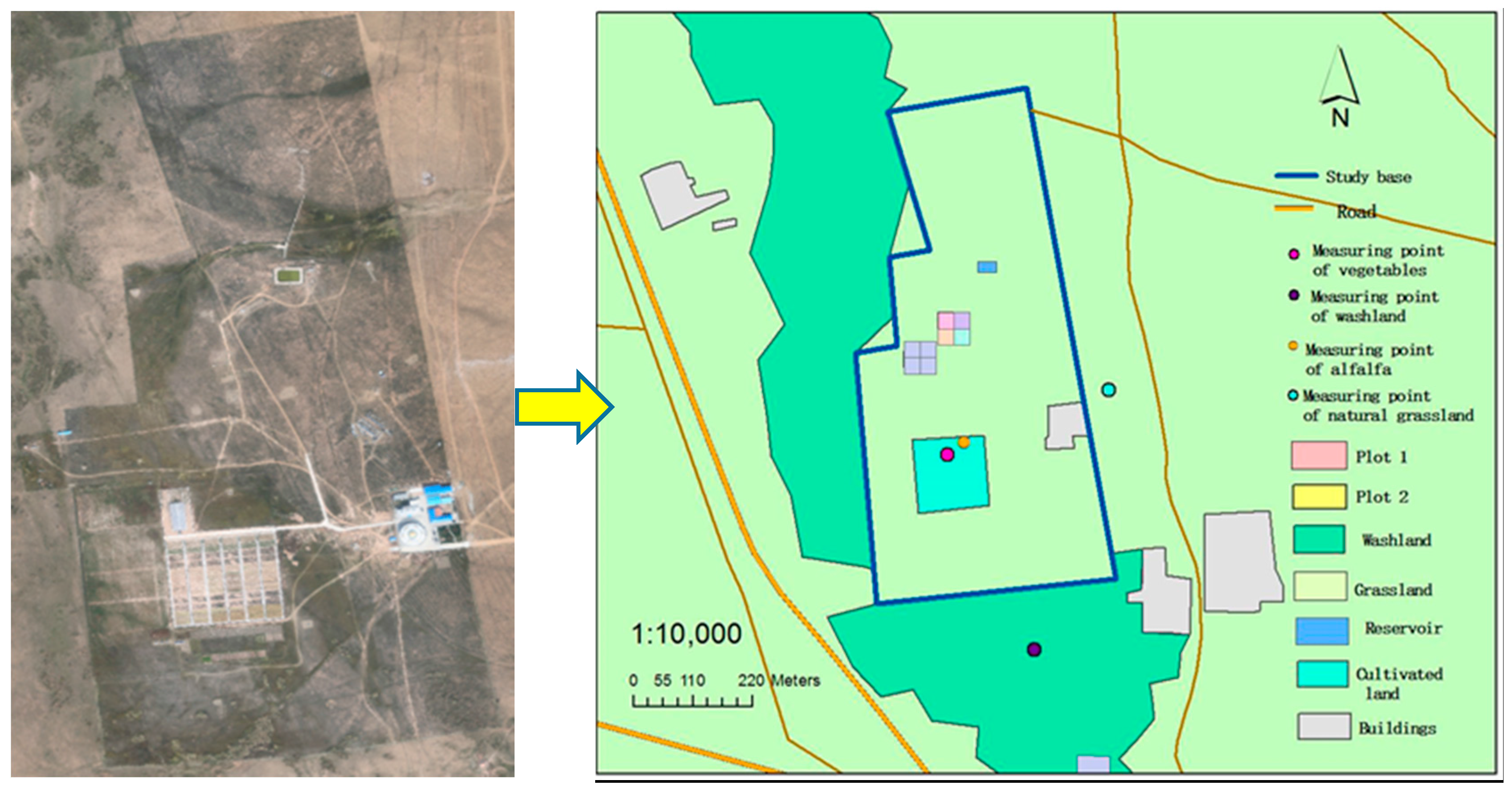
2.1. Study Site
2.2. GPR Theory
2.2.1. Measuring Principle
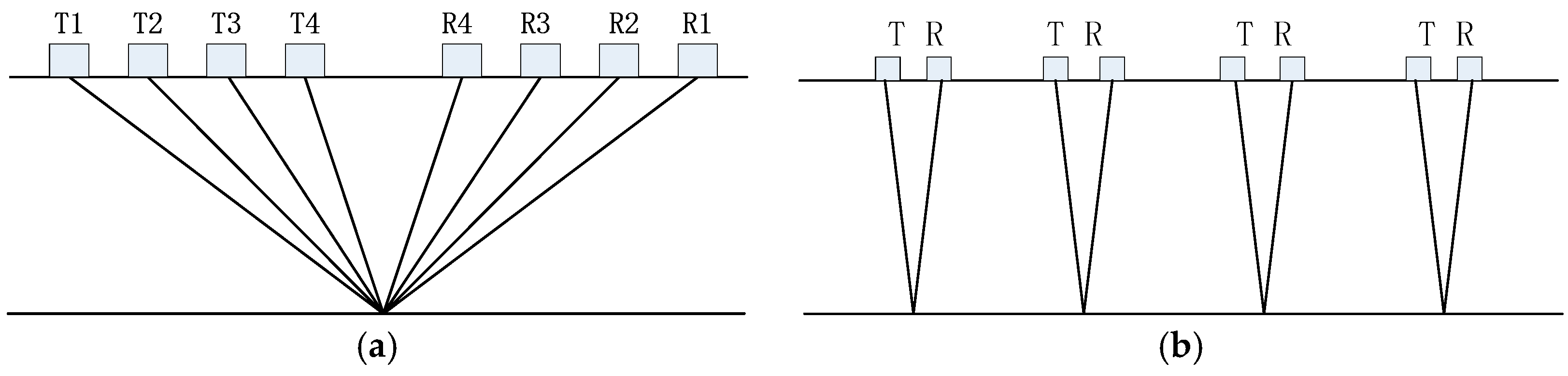
2.2.2. GPR Methods
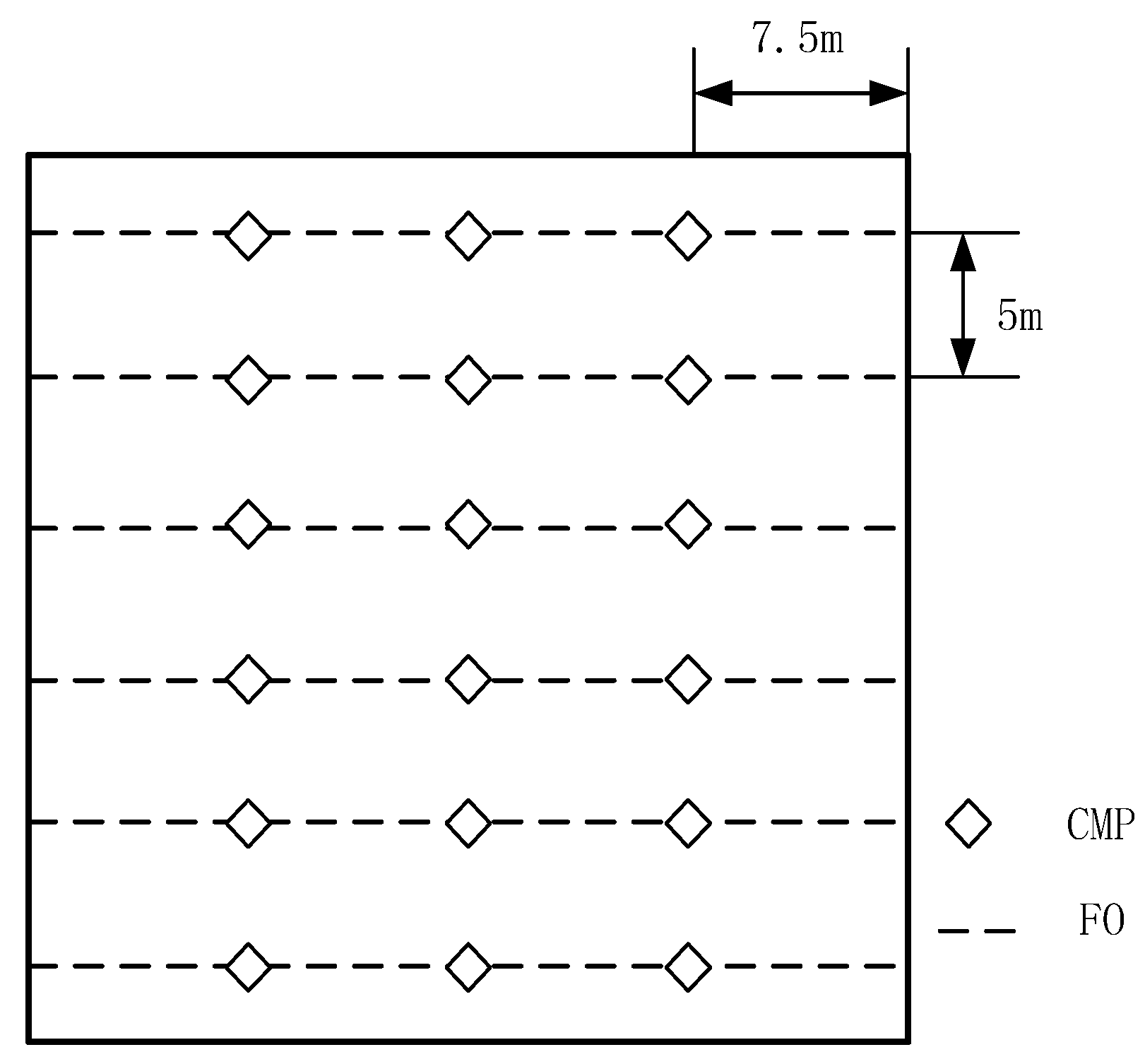
2.3. Data Acquisition
3. Results and Discussion
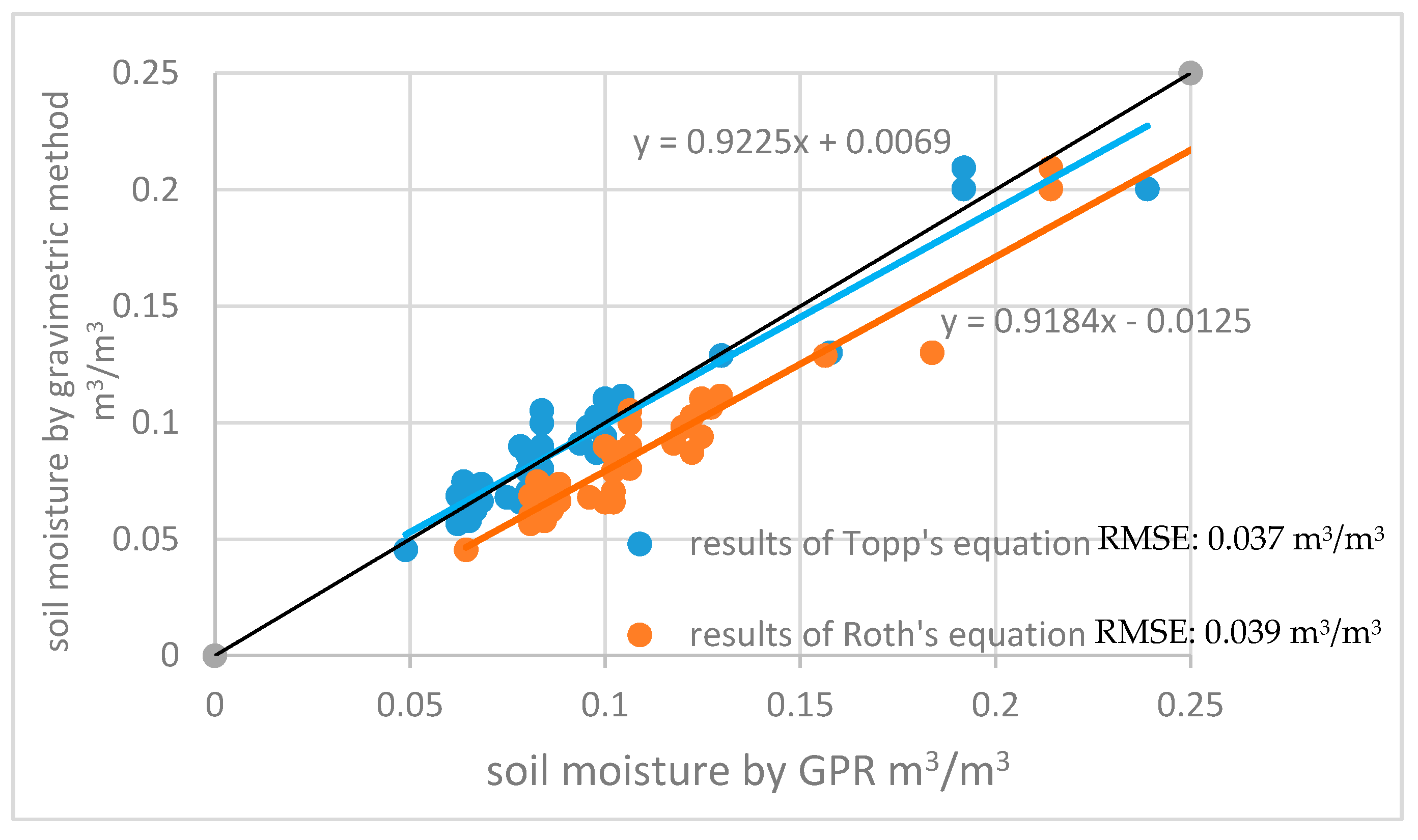
3.1. Inspection of the GPR Measurement Accuracy
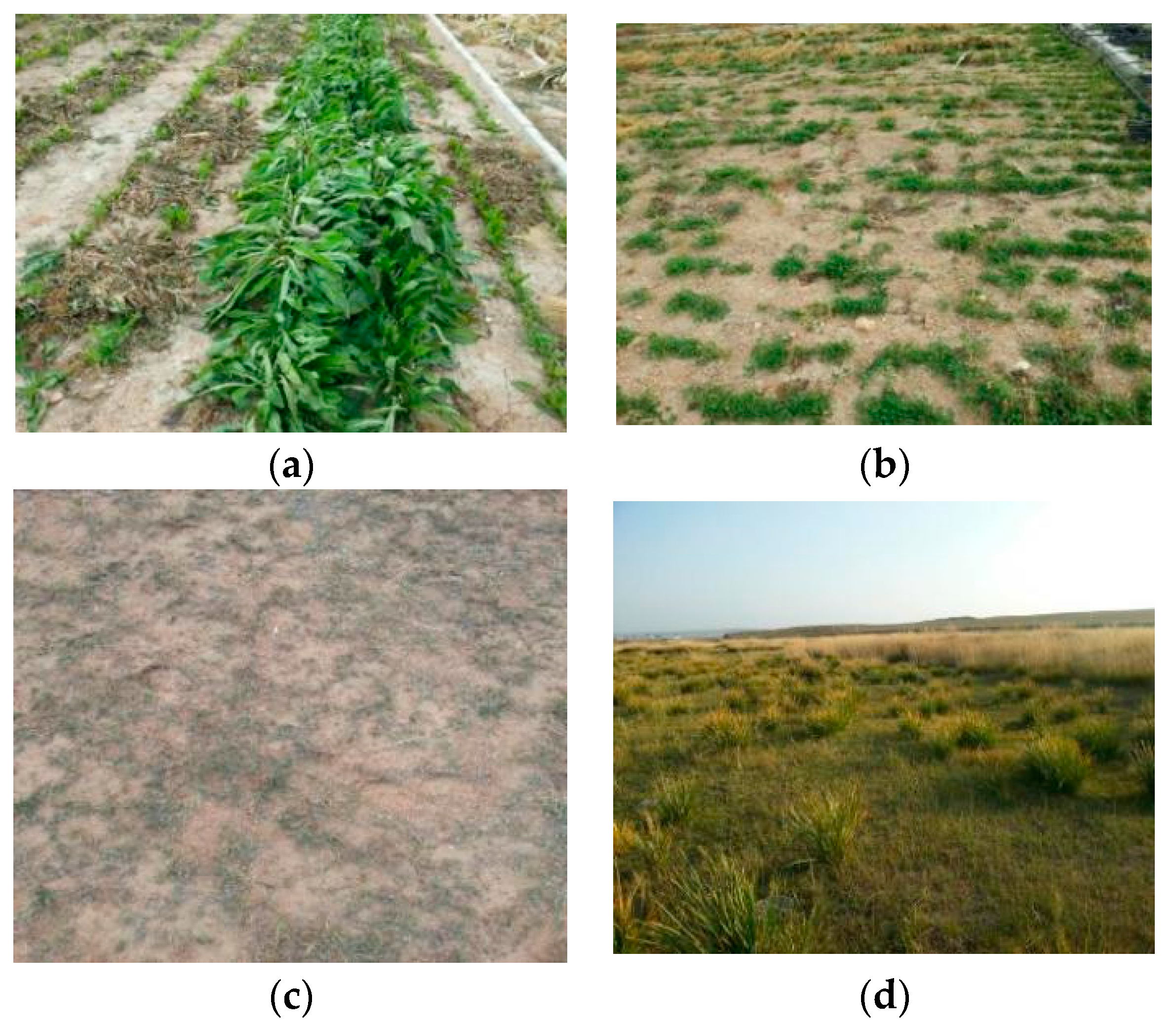
3.2. Soil Moisture of Different Land Cover Types
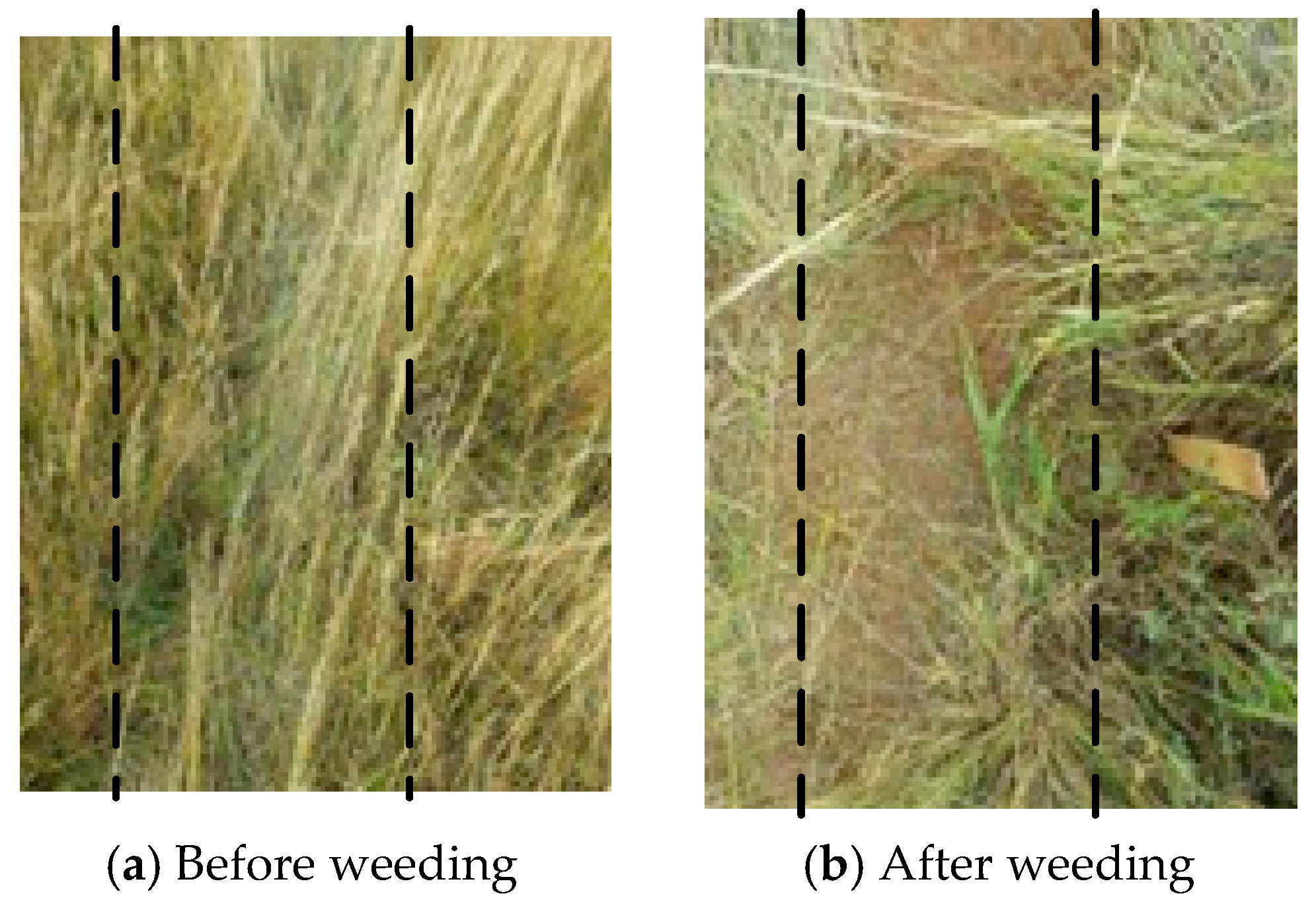
3.3. Effects of Vegetation Coverage on Soil Moisture and Its Measuring Accuracy
3.4. Effect of Precipitation on GPR Measurements
4. Conclusions
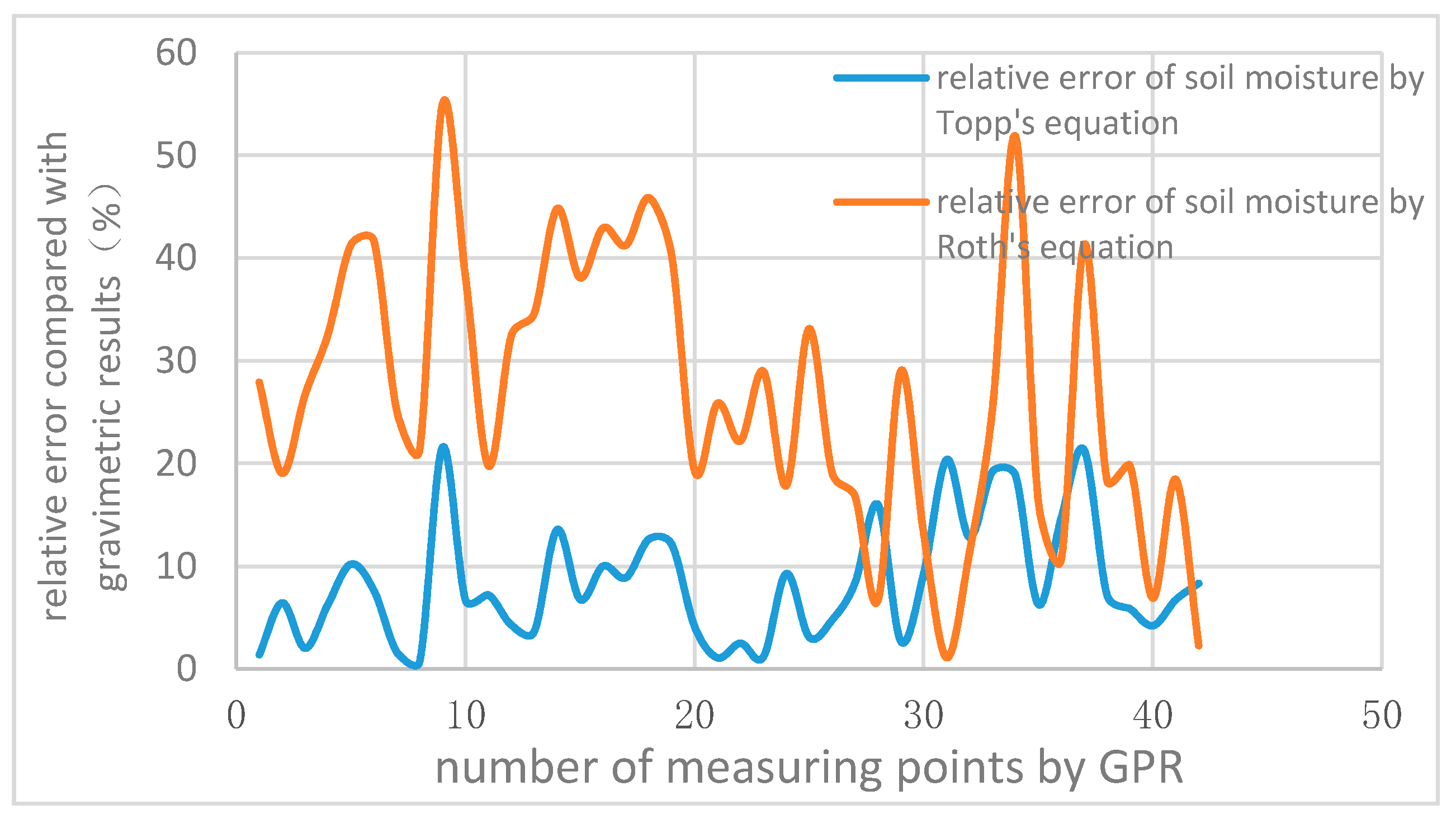
- For desert steppe region, the Topp’s equation is more accurate than the Roth’s equation in calculating the soil moisture of GPR data.
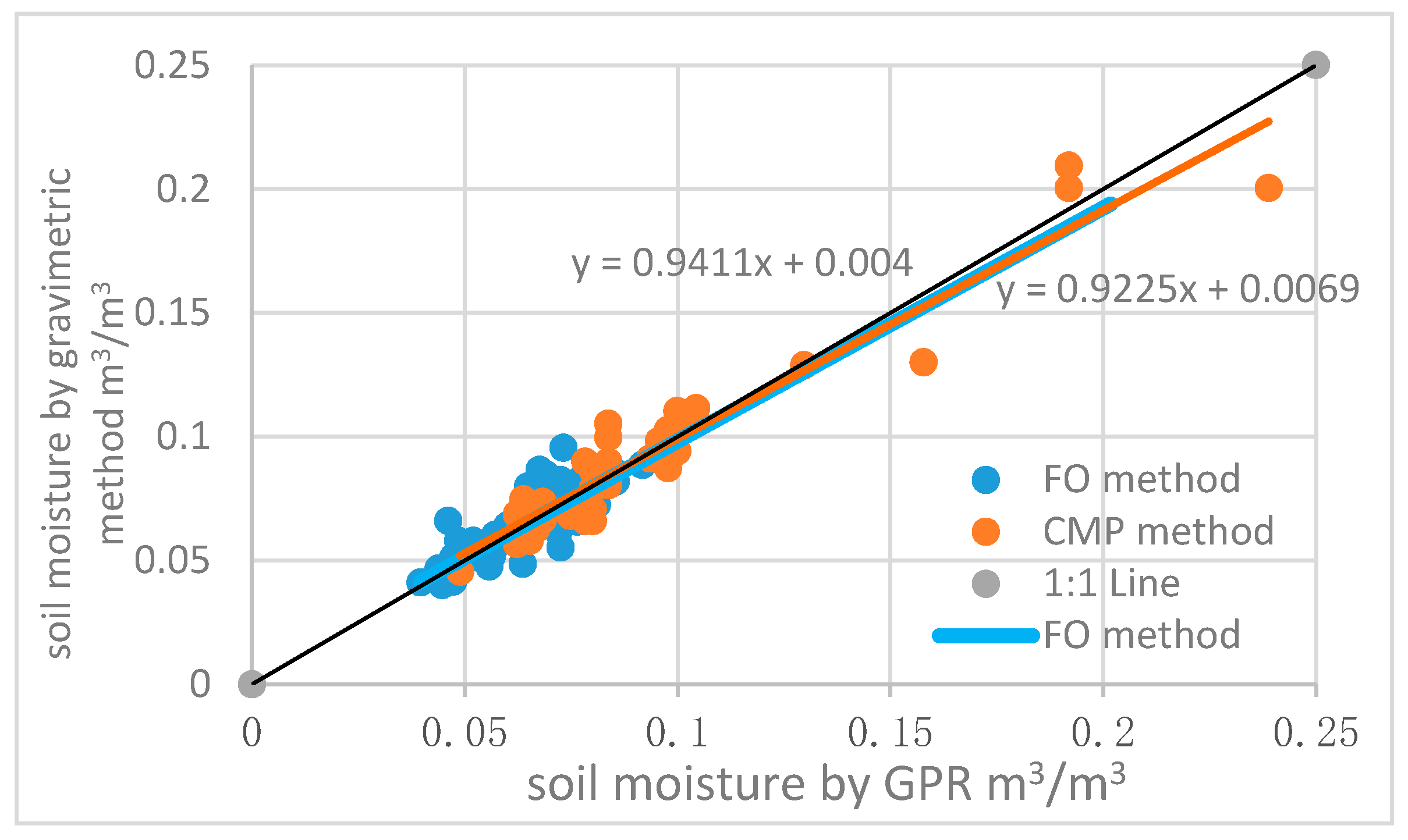
- The soil moisture measurements by GPR were consistent with gravimetric results, with the RMSE of only 0.0101 m3/m3. Compared with the traditional gravimetric method and TDR, GPR can quickly measure the soil moisture at different depths and obtain soil stratification condition without destroying soil layer structure by virtue of the portable and operational characteristics.
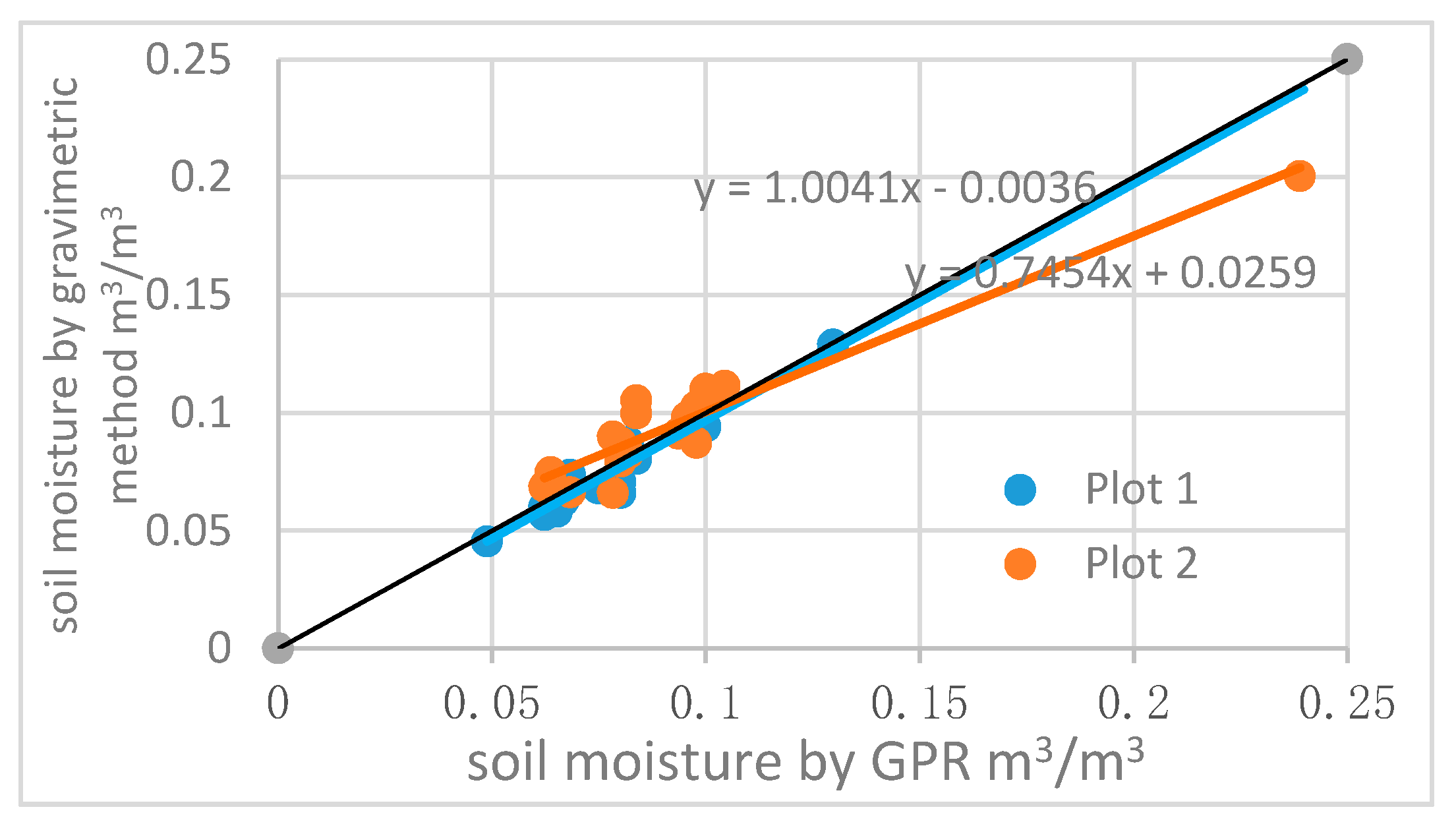
- The vegetation coverage affects the accuracy of GPR measurement and also affects the profile distribution of soil water content. When vegetation coverage is high, the air refraction wave interferes with the ground wave and reflected wave in the radar profile, which can reduce the accuracy of GPR measurement.
- Under certain conditions, precipitation reduces the effective depth of the ground wave, and further affects the depth of the soil moisture measured by the GPR ground wave.
- The accuracy comparison of GPR measurement in different soil types, the application of different GPR methods in desert steppe, and the combination of GPR and soil water model are to be further studied.
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| TDR | Time domain reflector |
| FDR | Frequency domain reflectometer |
| GPR | Ground penetrating radar |
| CRS | Cosmic-ray sensing probe |
| FO method | Fixed offset method |
| CMP method | Common-midpoint method |
| WARR method | Wide angle reflection and refraction method |
References
- Wang, L.; Qu, J.J. Satellite remote sensing applications for surface soil moisture monitoring: A review. Front. Earth Sci. 2009, 3, 237–247. [Google Scholar] [CrossRef]
- Ardekani, M.R.M. Off- and on-ground GPR techniques for field-scale soil moisture mapping. Geoderma 2013, 200–201, 55–66. [Google Scholar] [CrossRef]
- Huisman, J.A.; Sperl, C.; Bouten, W.; Verstraten, J.M. Soil water content measurements at different scales: Accuracy of time domain reflectometry and ground-penetrating radar. J. Hydrol. 2001, 254, 48–58. [Google Scholar] [CrossRef]
- Galagedara, L.W.; Parkin, G.W.; Redman, J.D.; von Bertoldi, P.; Endres, A.L. Field studies of the GPR ground wave method for estimating soil water content during irrigation and drainage. J. Hydrol. 2005, 245, 182–197. [Google Scholar] [CrossRef]
- Hubbard, S.; Grote, K.; Rubin, Y. Mapping the volumetric soil water content of a California vineyard using high-frequency GPR ground wave data. Lead. Edge 2002, 21, 552–559. [Google Scholar] [CrossRef]
- Steelman, C.M.; Endres, A.L. Assessing vertical soil moisture dynamics using multi-frequency GPR common-midpoint soundings. J. Hydrol. 2012, 436–437, 51–66. [Google Scholar] [CrossRef]
- Ma, Y.; Zhang, Y.; Zubrzycki, S.; Guo, Y.; Farhan, S.B. Hillslope-scale variability in seasonal frost depth and soil water content investigated by GPR on the southern margin of the sporadic permafrost zone on the Tibetan Plateau. Permafr. Periglac. Process. 2015, 26, 321–334. [Google Scholar] [CrossRef]
- Grote, K.; Hubbard, S.; Rubin, Y. Field-scale estimation of volumetric water content using ground-penetrating radar ground wave techniques. Water Resour. Res. 2003, 39, 1321–1335. [Google Scholar] [CrossRef]
- Wijewardana, Y.G.N.S.; Galagedara, L.W. Estimation of spatio-temporal variability of soil water content in agricultural fields with ground penetrating radar. J. Hydrol. 2010, 391, 24–33. [Google Scholar] [CrossRef]
- Pan, X.; Zhang, J.; Huang, P.; Roth, K. Estimating field-scale soil water dynamics at a heterogeneous site using multi-channel GPR. Hydrol. Earth Syst. Sci. 2012, 16, 4361–4372. [Google Scholar] [CrossRef]
- Overmeeren, R.A.V.; Sariowan, S.V.; Gehrels, J.C. Ground penetrating radar for determining volumetric soil water content: Results of comparative measurements at two test sites. J. Hydrol. 1997, 197, 316–338. [Google Scholar] [CrossRef]
- Steelman, C.M.; Endres, A.L.; Jones, J.P. High-resolution ground-penetrating radar monitoring of soil moisture dynamics: Field result, interpretation, and comparison with unsaturated flow model. Water Resour. Res. 2012, 48, 184–189. [Google Scholar] [CrossRef]
- Huisman, J.A.; Snepvangers, J.J.J.C.; Bouten, W.; Heuvelink, G.B.M. Mapping spatial variation in surface soil water content: Comparison of ground-penetrating radar and time domain reflectometry. J. Hydrol. 2002, 269, 194–207. [Google Scholar] [CrossRef]
- Weihermüller, L.; Huisman, J.A.; Lambot, S.; Herbst, M.; Vereecken, H. Mapping the spatial variation of soil water content at the field scale with different ground penetrating radar techniques. J. Hydrol. 2007, 340, 205–216. [Google Scholar] [CrossRef]
- Lunt, I.A.; Hubbard, S.S.; Rubin, Y. Soil moisture content estimation using ground-penetrating radar reflection data. J. Hydrol. 2005, 307, 254–269. [Google Scholar] [CrossRef]
- Stoffregen, H.; Yaramanci, U.; Zenker, T.; Wessolek, G. Accuracy of soil water content measurements using ground penetrating radar: Comparison of ground penetrating radar and lysimeter data. J. Hydrol. 2002, 267, 201–206. [Google Scholar] [CrossRef]
- Wang, Q.; Zhou, K.; Sun, L.; Qin, Y.; Li, G. A study of fast estimating soil water content by ground penetrating radar. J. Nat. Resour. 2013, 28, 881–888. (In Chinese) [Google Scholar]
- Qin, Y.; Chen, X.; Zhou, K.; Sun, L.; Zhang, J. Using GPR to sound the spatial and temporal distributions of dune surface soil water contents before and after snowmelt in the early spring. J. Glaciol. Geocryol. 2012, 34, 690–697. (In Chinese) [Google Scholar]
- Guo, X.; Wang, M.; Zhang, G.; Hou, L.; Sun, P.; Meng, Q. Nondestructive and quick in-situ testing of unsaturated sandy soil water content using ground penetrating radar refection method. Period. Ocean Univ. China 2010, 40, 141–145. (In Chinese) [Google Scholar]
- Ma, F.; Lei, S.; Yang, S.; Zhen, F.; Wang, Y. Study on the relationship between soil water content and ground penetrating radar signal attributes. Chin. J. Soil Sci. 2014, 45, 809–815. (In Chinese) [Google Scholar]
- Li, H.; Zhong, R. Numerical study on the relationship between amplitudes of ground penetrating radar wave and water content in soil. J. Appl. Sci. 2015, 33, 41–49. (In Chinese) [Google Scholar]
- Mangel, A.R.; Moysey, S.M.J.; Ryan, J.C.; Tarbutton, J.A. Multi-offset ground-penetrating radar imaging of a lab-scale infiltration test. Hydrol. Earth Syst. Sci. 2011, 16, 4009–4022. [Google Scholar] [CrossRef]
- Moysey, S. Hydrologic trajectories in transient ground-penetrating radar reflection data. Geophysics 2010, 75, 211–219. [Google Scholar] [CrossRef]
- Cui, F.; Wu, Z.; Wang, L.; Wu, Y. Application of the ground penetrating radar ARMA power spectrum estimation method to detect moisture content and compactness values in sandy loam. J. Appl. Geophys. 2015, 120, 26–35. [Google Scholar] [CrossRef]
- Tran, A.P.; André, F.; Lambot, S. Validation of near-field ground-penetrating radar modeling using full-wave inversion for soil moisture estimation. IEEE Trans. Geosci. Remote Sens. 2014, 52, 5483–5497. [Google Scholar] [CrossRef]
- Davis, J.L.; Annan, A.P. Ground penetrating radar for high resolution mapping of soil and rock stratigraphy. Geophys. Prospect. 1989, 37, 531–551. [Google Scholar] [CrossRef]
- Topp, G.C.; Davis, J.L.; Annan, A.P. Electromagnetic determination of soil water content: Measurements in coaxial transmission lines. Water Resour. Res. 1980, 16, 574–582. [Google Scholar] [CrossRef]
- Roth, C.H.; Malicki, M.A.; Plagge, R. Empirical evaluation of the relationship between soil dielectric constant and volumetric water content as the basis for calibrating soil moisture measurements by TDR. Soil Sci. 1992, 43, 1–13. [Google Scholar] [CrossRef]
- Sperl, C. Erfassung der Raum-Zeitlichen Variation des Boden-Wassergehaltes in Einem Agrarokosystem mit dem Ground-Penetrating Radar. Ph.D. Thesis, Technische Universitat, München, Germany, 1999; p. 182. [Google Scholar]
- Huisman, J.A.; Hubbard, S.S.; Redman, J.D.; Annan, A.P. Measuring soil water content with ground penetrating radar: A review. Vadose Zone J. 2003, 2, 476–491. [Google Scholar] [CrossRef]
- Tosti, F.; Slob, E. Determination by using GPR of the volumetric water content in strucures substructures foundations and soil. In Civil. Engineering Applications of Ground Penetrating Radar; Springer International Publishing: Cham, Switzerland, 2015. [Google Scholar]
- Lu, Y.; Song, W.; Lu, J.; Su, Z.; Liu, H.; Tan, Y.; Han, J. Soil water measurement by ground penetrating radar and its scale features. South.-to-North. Water Transf. Water Sci. Technol. 2017, 15, 37–44. (In Chinese) [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Land Cover Type | Soil Moisture by Ground Wave (m3/m3) | Effective Depth (m) | Soil Moisture above the First Reflected Layer (m3/m3) | Effective Depth (m) | Soil Moisture above the Second Reflected Layer (m3/m3) | Effective Depth (m) |
|---|---|---|---|---|---|---|
| Alfalfa | 0.1919 | 0.10 | 0.0978 | 0.63 | ||
| Vegetables | 0.1578 | 0.10 | 0.1961 | 0.25 | 0.1612 | 0.66 |
| Washland | 0.0801 | 0.10 | 0.0622 | 0.40 | 0.1243 | 0.71 |
| Natural Grassland | 0.0819 | 0.10 | 0.0652 | 0.36 | 0.1021 | 0.75 |
| Plot 1 | 0.0750 | 0.10 | 0.0975 | 0.41 | ||
| Plot 2 | 0.0939 | 0.10 | 0.0716 | 0.43 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lu, Y.; Song, W.; Lu, J.; Wang, X.; Tan, Y. An Examination of Soil Moisture Estimation Using Ground Penetrating Radar in Desert Steppe. Water 2017, 9, 521. https://doi.org/10.3390/w9070521
Lu Y, Song W, Lu J, Wang X, Tan Y. An Examination of Soil Moisture Estimation Using Ground Penetrating Radar in Desert Steppe. Water. 2017; 9(7):521. https://doi.org/10.3390/w9070521
Chicago/Turabian StyleLu, Yizhu, Wenlong Song, Jingxuan Lu, Xuefeng Wang, and Yanan Tan. 2017. "An Examination of Soil Moisture Estimation Using Ground Penetrating Radar in Desert Steppe" Water 9, no. 7: 521. https://doi.org/10.3390/w9070521
APA StyleLu, Y., Song, W., Lu, J., Wang, X., & Tan, Y. (2017). An Examination of Soil Moisture Estimation Using Ground Penetrating Radar in Desert Steppe. Water, 9(7), 521. https://doi.org/10.3390/w9070521