1. Introduction
The infiltration of water on slopes is a common cause of slope failure. The source of the water might be rainfall, snowmelt, irrigation, or leaking structures. Rainfall falling on a slope is partitioned into overland flow (runoff, henceforth) and infiltration. The mechanism governing the partition of rainfall water into runoff or infiltration depends on a number of factors: the rainfall intensity and its temporal distribution, the angle of the slope, the infiltration rate at the slope surface, the hydraulic characteristics of the soil underlying the slope, the moisture content distribution through the soil profile, and the hydraulic characteristics of the slope surface. Infiltrated water moves downward through the soil profile and changes the soil’s pore water pressure, its apparent cohesion, and its unit weight. Those changes may affect the stability of the slope to the point of causing sliding. The cause of slope failure is the increased moisture content through the soil profile and its effects on the soil’s unit weight, the soil’s shear strength parameters, and the effective stress on the slip (or failure) surface [
1,
2,
3,
4,
5,
6,
7].
There are two classic models of translational slope stability. Both models apply to “infinite” slopes, which practically means that the thickness (
) of the sliding soil mass is much smaller than the length (
) of the slope, say,
30, and
is commonly less than 2 m [
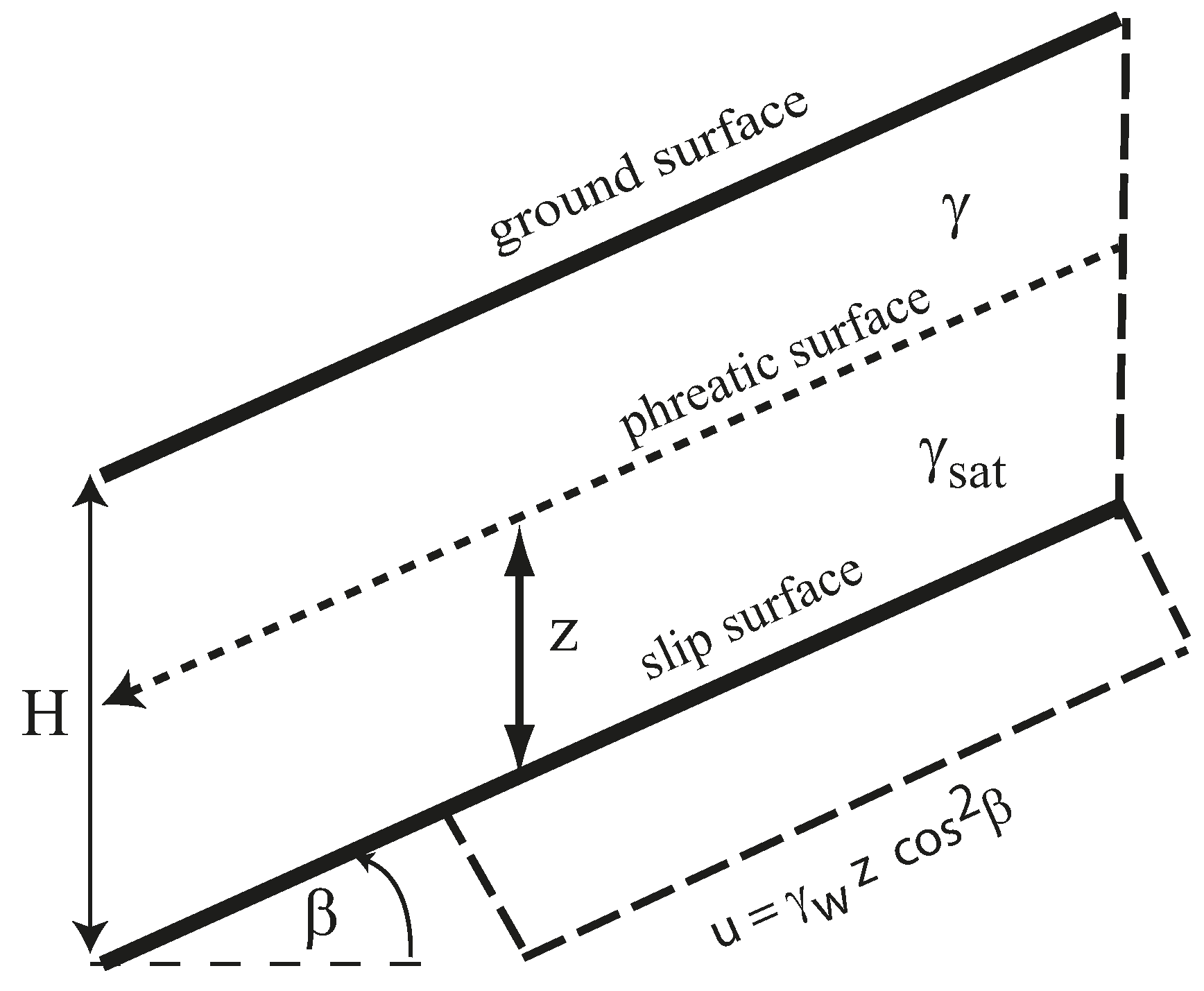
7], although it may be deeper. The first model of the translational stability of long slopes is widely used [
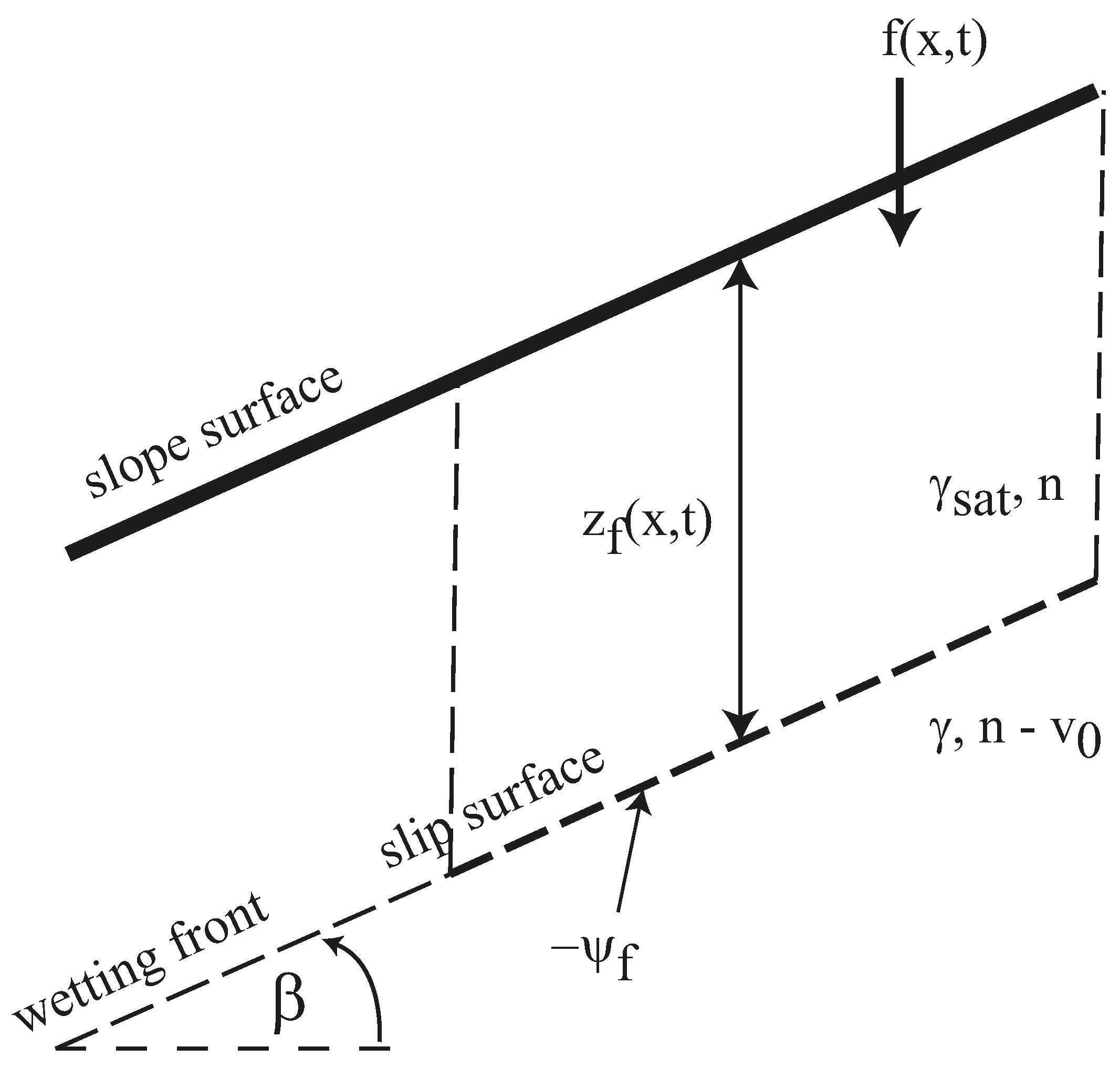
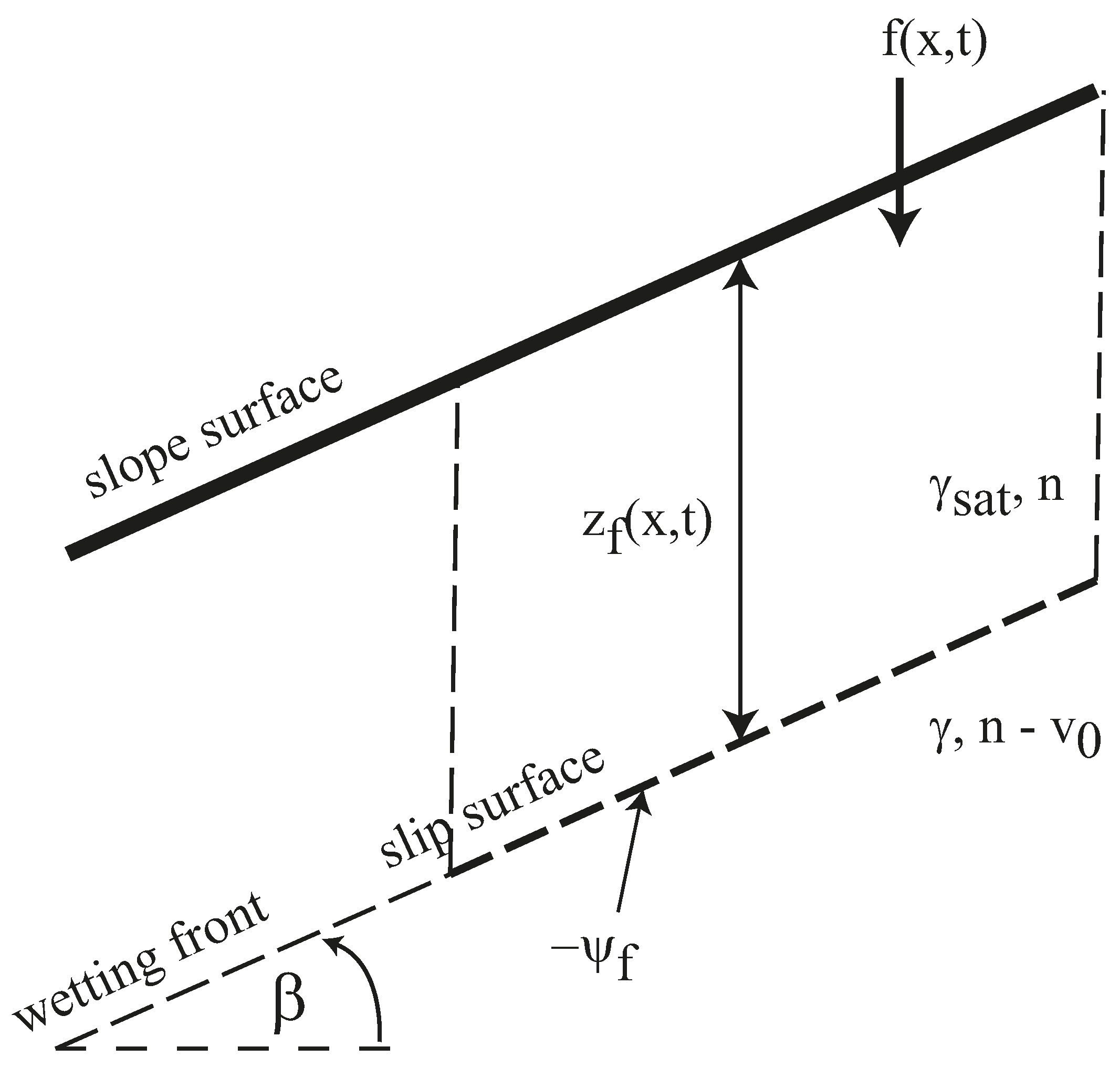
5]. It prescribes a phreatic surface parallel to the ground surface and the slip surface, as shown in
Figure 1.
,
,
,
,
,
, and in
Figure 1 denote the thickness of the sliding mass, the pore pressure exerted along the slip surface, the thickness zone of saturation above the slip surface, the moist unit weight of the soil, the soil’s saturated unit weight, and the unit weight of the water (
= 9.81 kN/m
3), respectively. The stability of the slope decreases as the thickness of saturation
increases. The degree of stability is measured by the factor of safety (
FS) of the slope soil, which equals the ratio of the forces resisting sliding to the forces driving sliding. A slope with an
FS value larger than 1 is stable, it is at limiting equilibrium when
FS = 1, and it fails if
FS < 1. It is known (see, e.g., [
7]) that the
FS of the long slope in
Figure 1 associated with effective stress analysis is given by the following equation:
in which
,
, and
denote the soil’s cohesion (or cohesive strength), the average unit weight of the sliding mass (
), and the angle of friction of the soil, respectively. The reasons for slope failure as the saturated thickness
increases are evident. The first term on the right-hand side of Equation (1) is cohesion related. It decreases as
increases, thus lowering the
FS. This is because the average unit weight of the sliding soil mass increases with increasing
. In addition, the expression within the parentheses of the second term on the right hand side of Equation (1) decreases with increasing
, is equal to 1 when
= 0, and is equal to
, or about ½, when
. A slope becomes unstable whenever a rising
lowers its factor of safety below 1.
The long-slope stability condition depicted in
Figure 1 and quantified by Equation (1) does not explain how water enters the soil and moves through it. It implies that water enters the soil and becomes perched above the slip surface, which is found at a depth
below the ground surface. For this to happen, there must be a change of soil properties or discontinuity at depth
coinciding with the slip surface, where the soil beneath the depth
must have a hydraulic conductivity smaller than that of the overlying soil.
Loáiciga et al. [
7] provides details of a second model of translational slope stability whereby the phreatic surface emerges from long slopes. This second model also assumes the existence of unconfined, perched, groundwater over a slip surface. Several authors have proposed slope stability models for rotational slides (see, e.g., [
8,
9]), and three-dimensional stress-strain models of slope deformation and failure solved by finite elements [
10]. This paper deals with translational slides occurring on long slopes where the phreatic surface is parallel to the slope and slip surfaces (see
Figure 1), and the source of water is rainfall.
The classic model of translational stability represented by
Figure 1 and Equation (1) does not take into account the intensity and temporal distribution of rainfall falling on a slope, nor does it consider how much of that rainfall leaves the slope as runoff. It assumes that there is a source of water that saturates the soil over the thickness
above the slip surface. This paper develops a methodology for the coupled numerical simulation of runoff and infiltration caused by variable rainfall falling on a slope that accounts for changing soil moisture conditions. The depth of infiltration is shown to affect the translational stability of long slopes subjected to rainfall, without assuming a perching of soil water over the slip surface. This new model offers an alternative mechanism for the translational stability of slopes to that of the classic model represented by
Figure 1 and Equation (1).
Iverson [
3] proposed a theory for the translational stability of long slopes caused by rainfall relying on a 1-D version of Richards’ infiltration equation in the analysis. A steady-state version of the latter equation was applied to the analysis of long-term slope stability, and a linearized simplification of the 1-D version of the Richards equation was employed to study short-term slope stability. The input of variable rainfall at the slope surface was handled in Iverson’s [
3] short-term analysis via a boundary condition of infiltration at the slope surface, and by the superposition of solutions of the linearized simplification of the 1-D version of the Richards equation to account for variable rainfall. Rainfall in excess of the soil’s infiltration capacity (or maximum infiltration rate in Iverson’s terminology) becomes runoff that does not influence the infiltration process [
3]. It is relevant at this juncture that Iverson’s simplified infiltration equation for the short-term analysis of translational slope stability implies the piston-flow type displacement of the wetting front that descends from the slope surface, driven by water input at the surface. It has, in this sense, some similarity with Green and Ampt’s [
11] infiltration model (see also, [
12]), which is applied in the present work. There are several key differences between the present work and Iverson’s [
3]. First, this work numerically solves the coupled equations of infiltration and runoff during variable rainfall, which includes the calculation of the depth of overland flow on the slope surface. Secondly, infiltration is driven by a generalized version of the Green and Ampt model, with a variable depth of water on the slope surface. Thirdly, translational slope stability is assessed by calculating the effect that the wetting front has on the factor of safety as it moves downward through the soil profile. Lastly, the numerical model for assessing runoff and infiltration can be simulated for any arbitrary period during which infiltration is driven by rainfall. Slope stability is assessed as a function of the advancing wetting front, the slope geometry, the soil’s unit weight, and shear-strength properties.
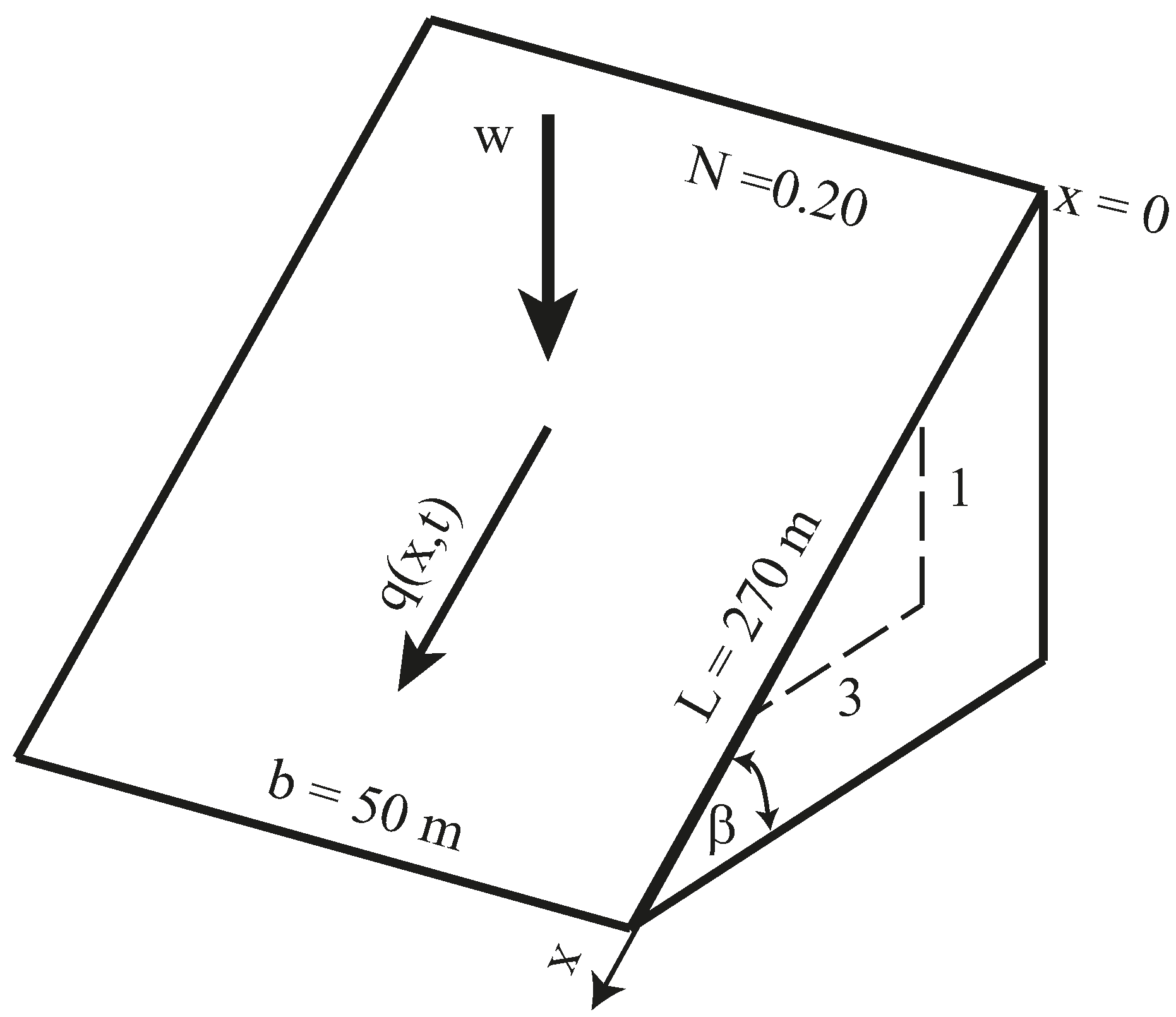
2. The Generic Layout of a Slope Subjected to Rainfall that May Undergo Translational Sliding
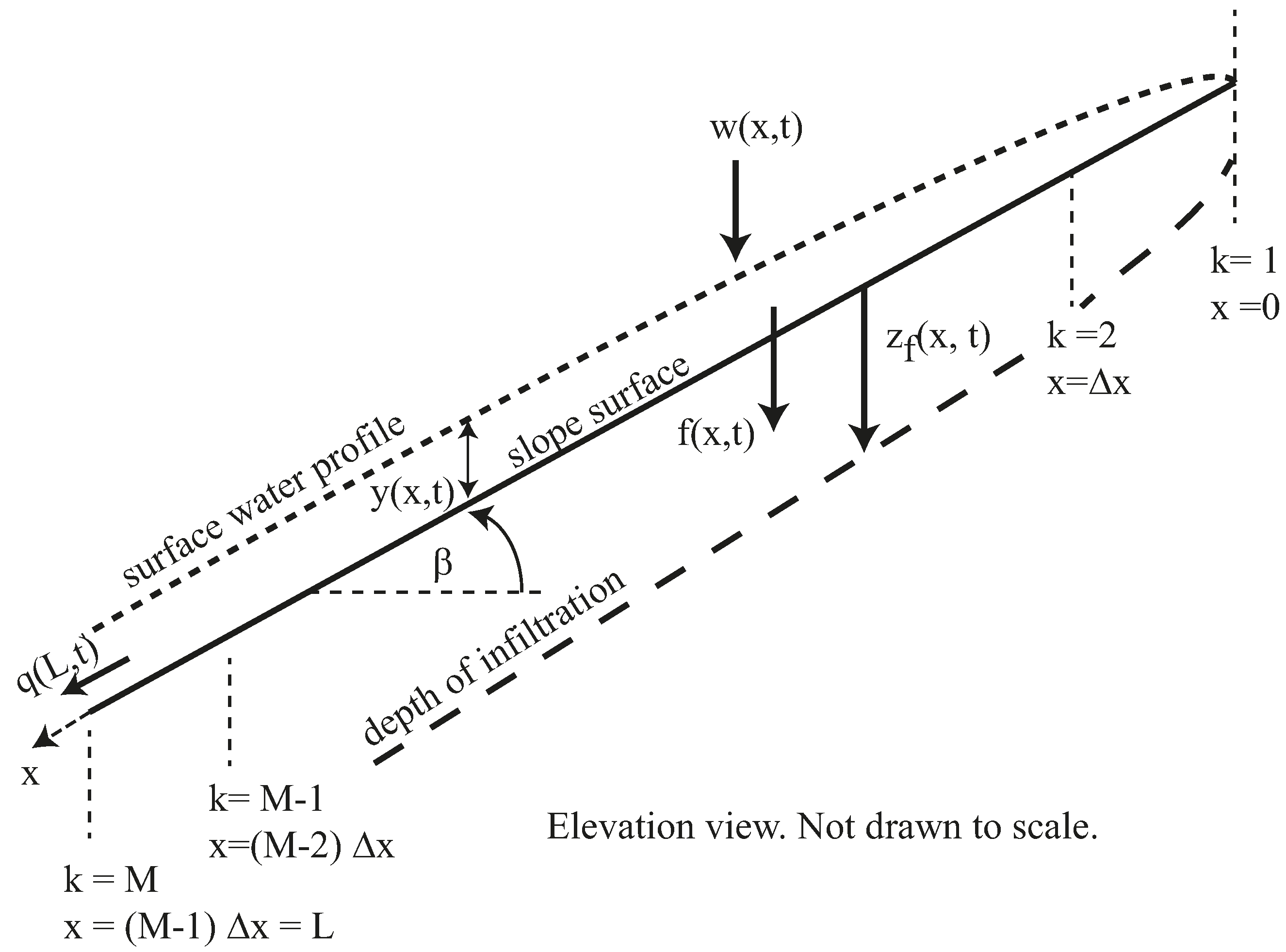
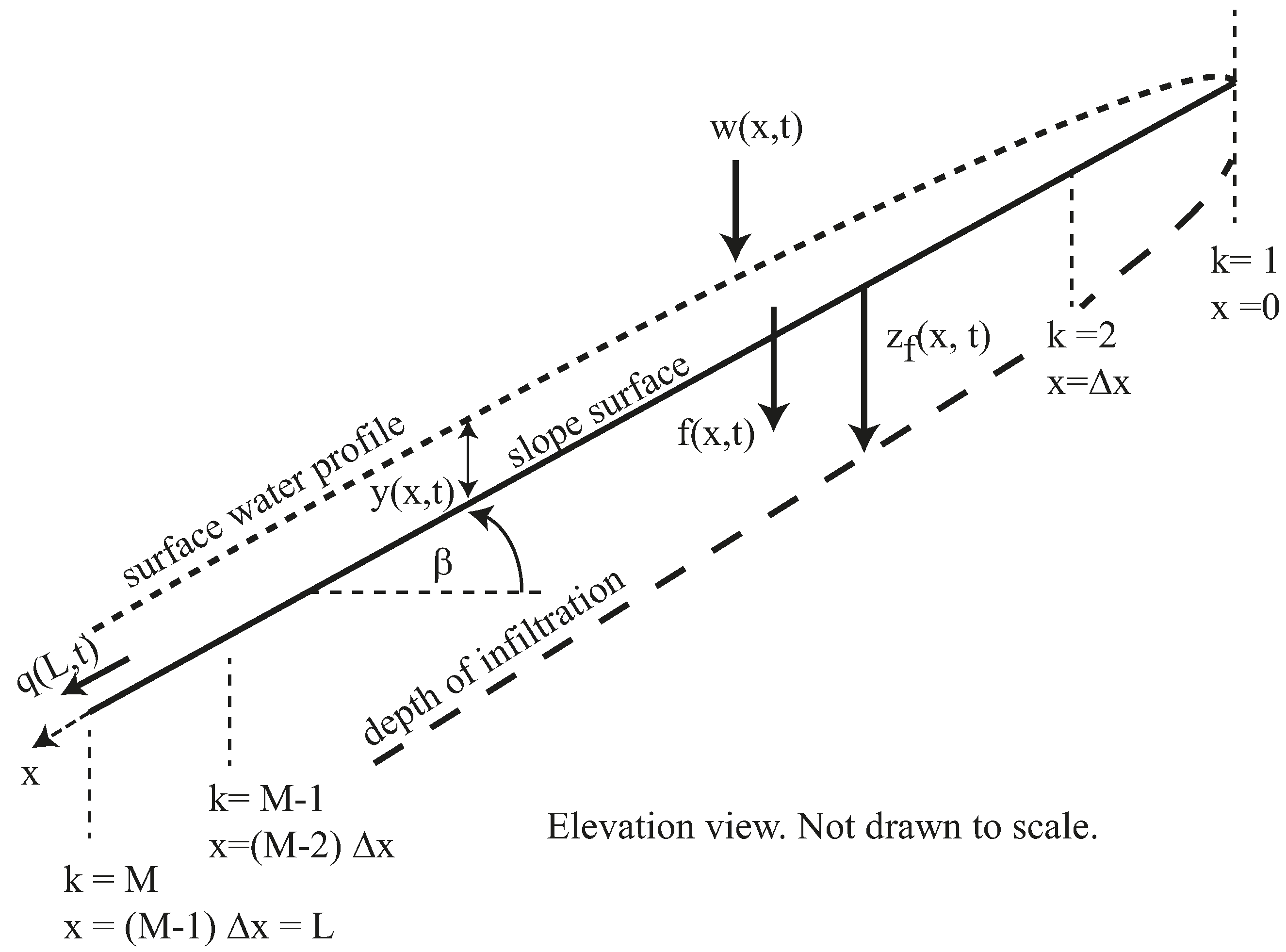
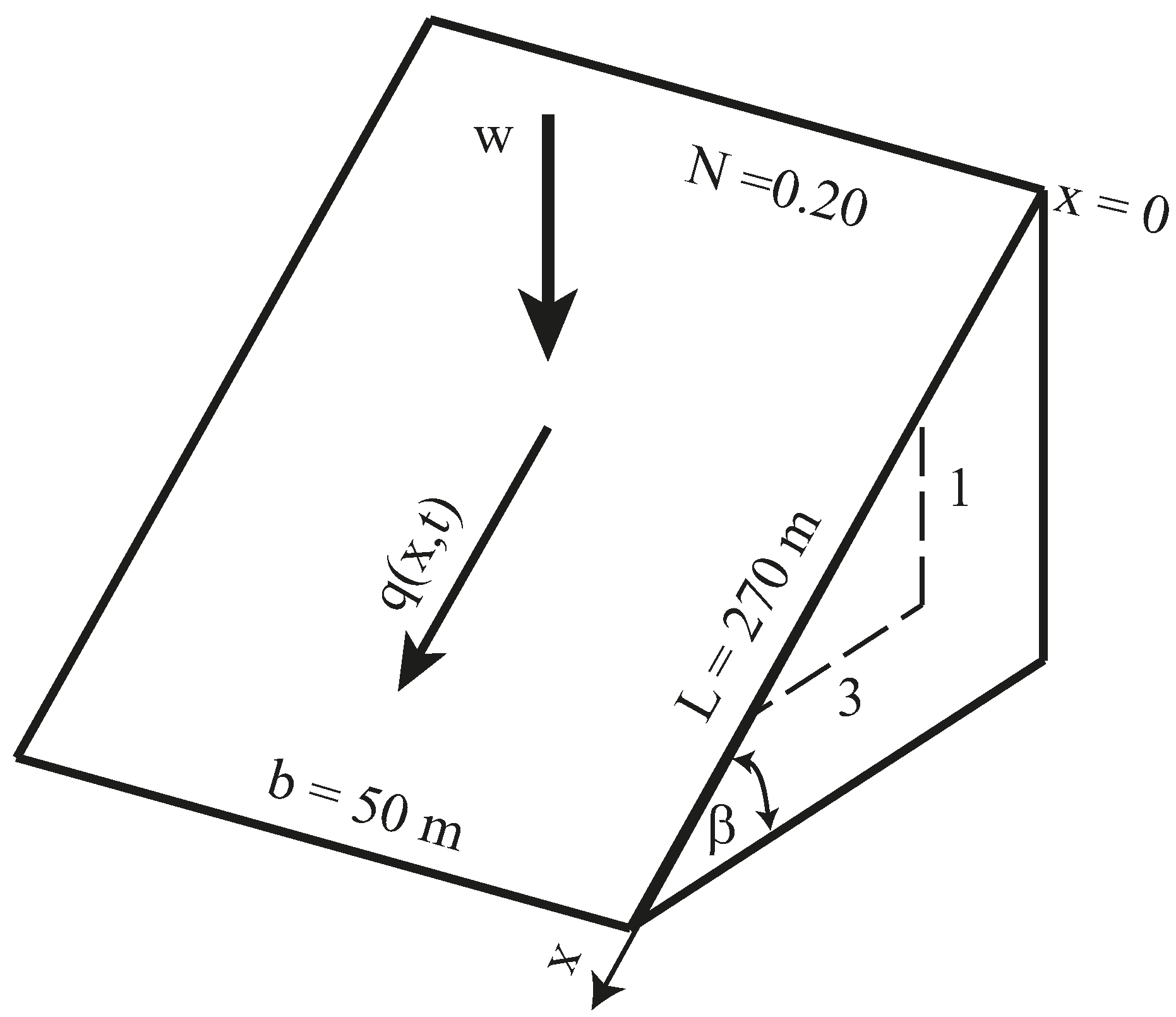
Figure 2 depicts the various fluxes and geometric variables that are included in this paper’s coupled analysis of rainfall, runoff, infiltration, and slope stability. The following notation is introduced in
Figure 1:
: station index for the longitudinal coordinate
that measures the distance from
at the highest point of the sliding mass to
at the toe of the sliding mass, where
;
denotes the time index, starting with
= 0 at the start of rainfall;
: the infiltration rate (at the slope surface) at position
and time
;
: the length of the slope analyzed for slope stability =
;
: the overland flow at the toe of the slope per unit width of the slope perpendicular to the plane of
Figure 2;
: the rainfall rate falling on the slope;
: the angle of the slope;
: the longitudinal coordinate that coincides with the slope surface;
: the depth of runoff measured vertically between the slope surface and the water surface as shown in
Figure 2;
: the depth of the wetting front at position
and time
: the discretization interval, or length step, for the longitudinal coordinate
.
3. Kinematic-Wave Runoff Affected by Rainfall and Infiltration
Runoff on a slope surface is wide and shallow, so that the hydraulic radius is approximately equal to
. Runoff is herein modeled with the kinematic-wave approximation to the equation of 1-D (shallow and wide) overland flow, with accretion by rainfall and depletion by infiltration (see, e.g., [
13,
14,
15]):
In Equation (2),
is the depth of runoff,
and
denote the infiltration rate and rainfall rate, respectively, and the derivative of the infiltration
with respect to time is represented by
=
. The coefficients
= 5/3,
;
is defined by the following equation:
where
and
denote the Manning’s roughness coefficient and the slope of the terrain, respectively. The initial condition of Equation (2) is as follows:
in which
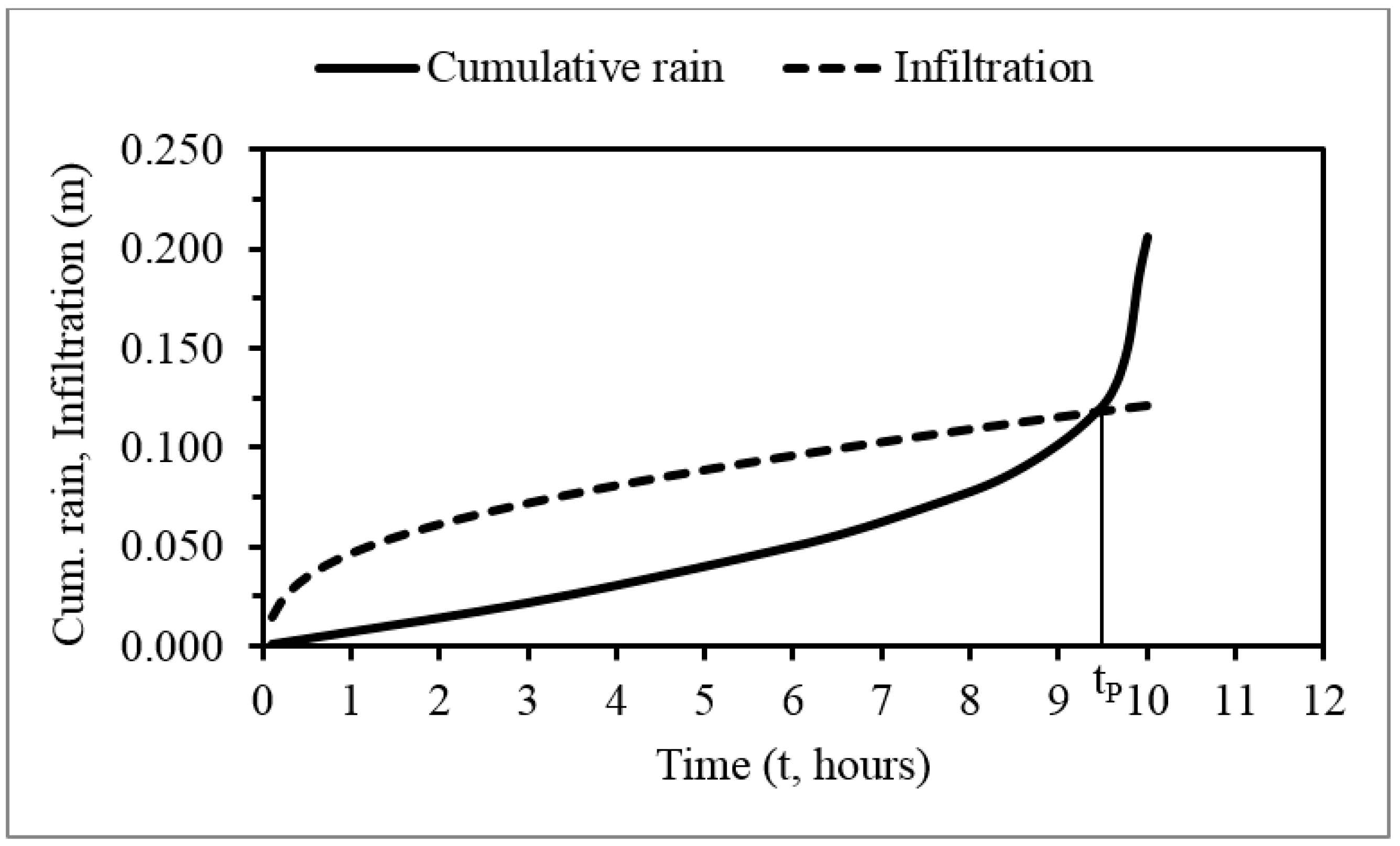
denotes the time at which runoff emerges on the slope. The boundary condition of Equation (2) at the upstream end is as follows:
The overland flow
(in m
3/s per unit width of slope) at location
and time
is given by Manning’s equation:
The next sections present the infiltration model developed in this work.
6. Translational Stability Analysis of Long Slopes
This paper fundamentally departs from the classic long-slope, translational, failure mechanism embodied by Equation (1) and diagramed in
Figure 1.
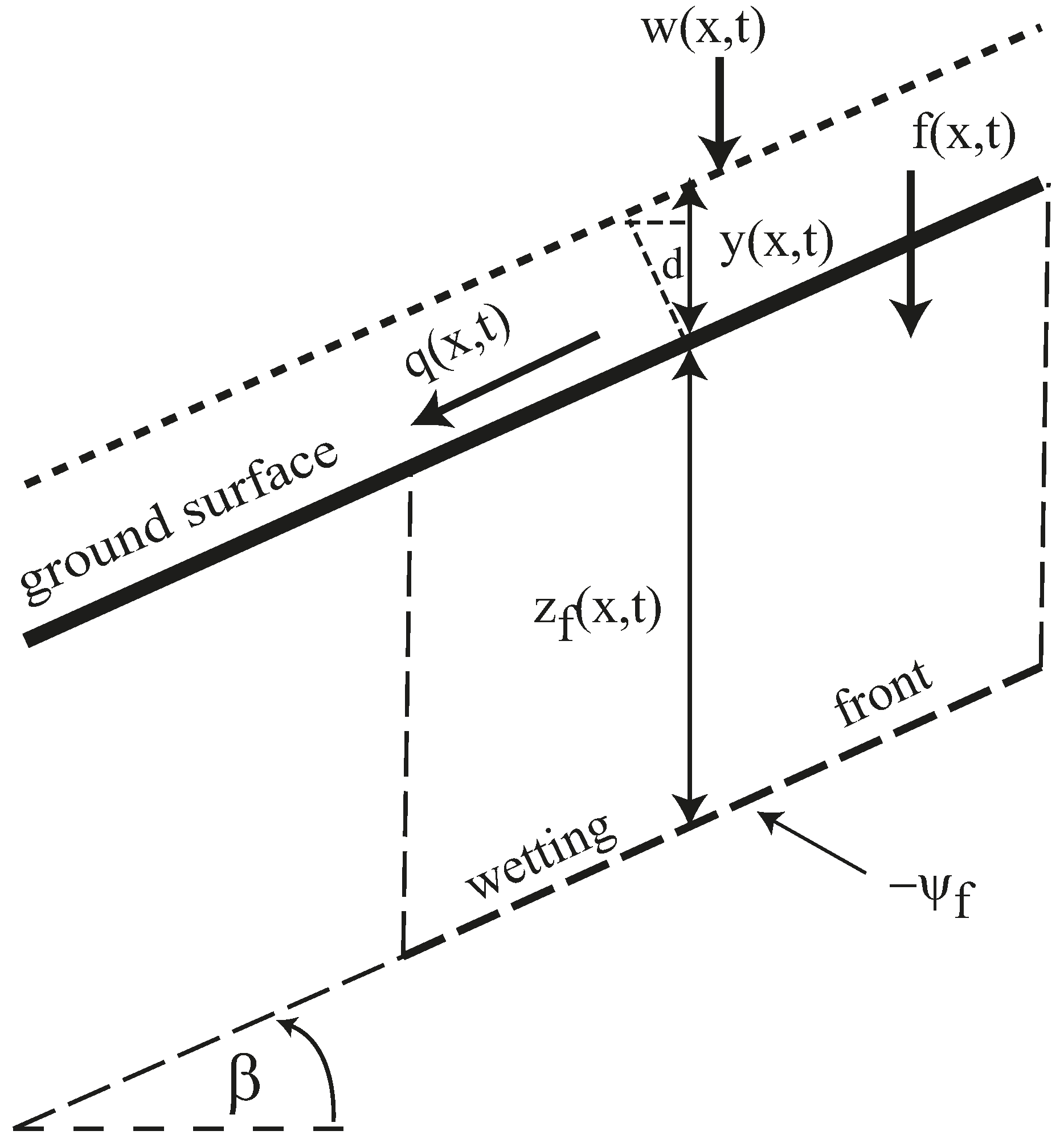
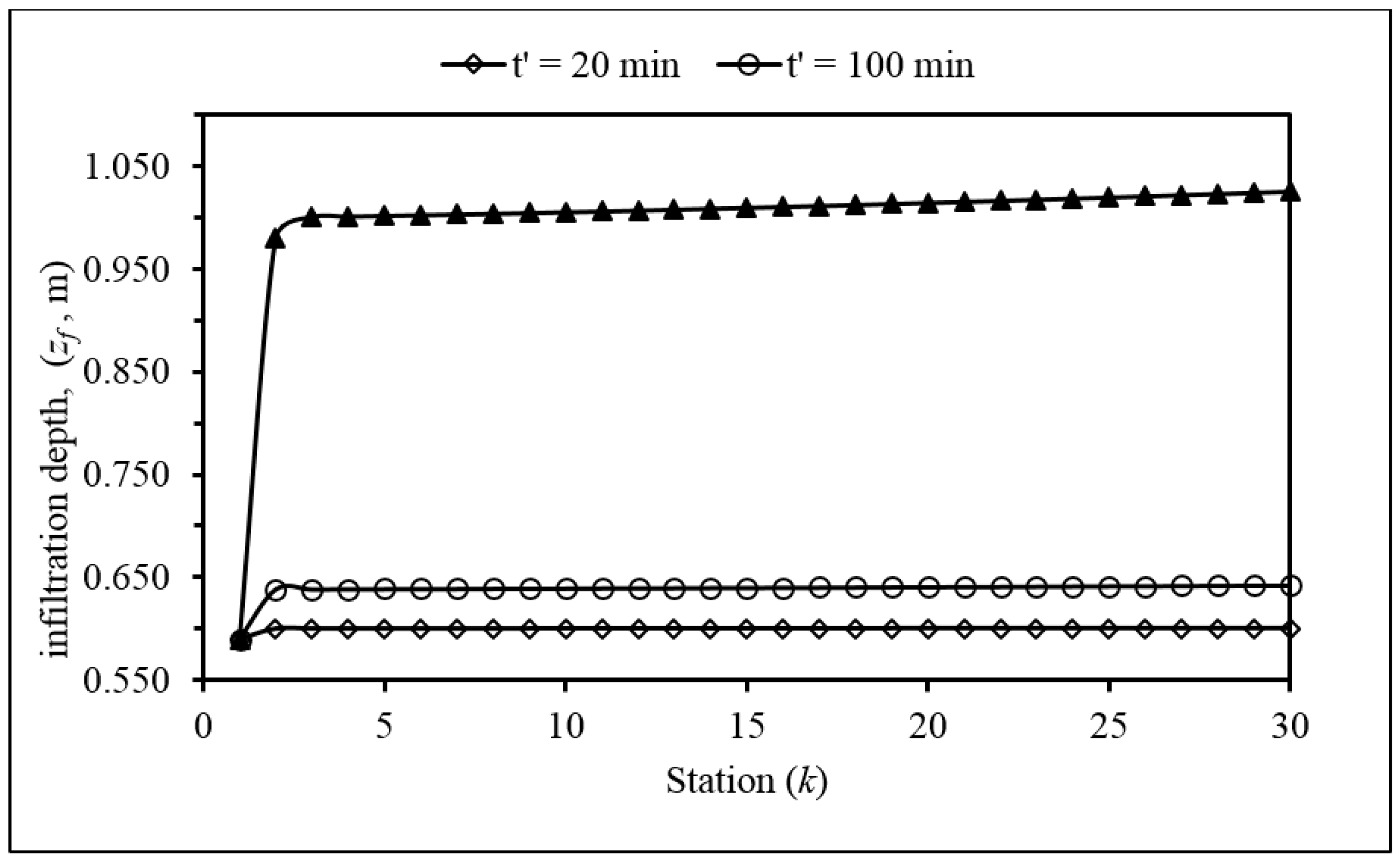
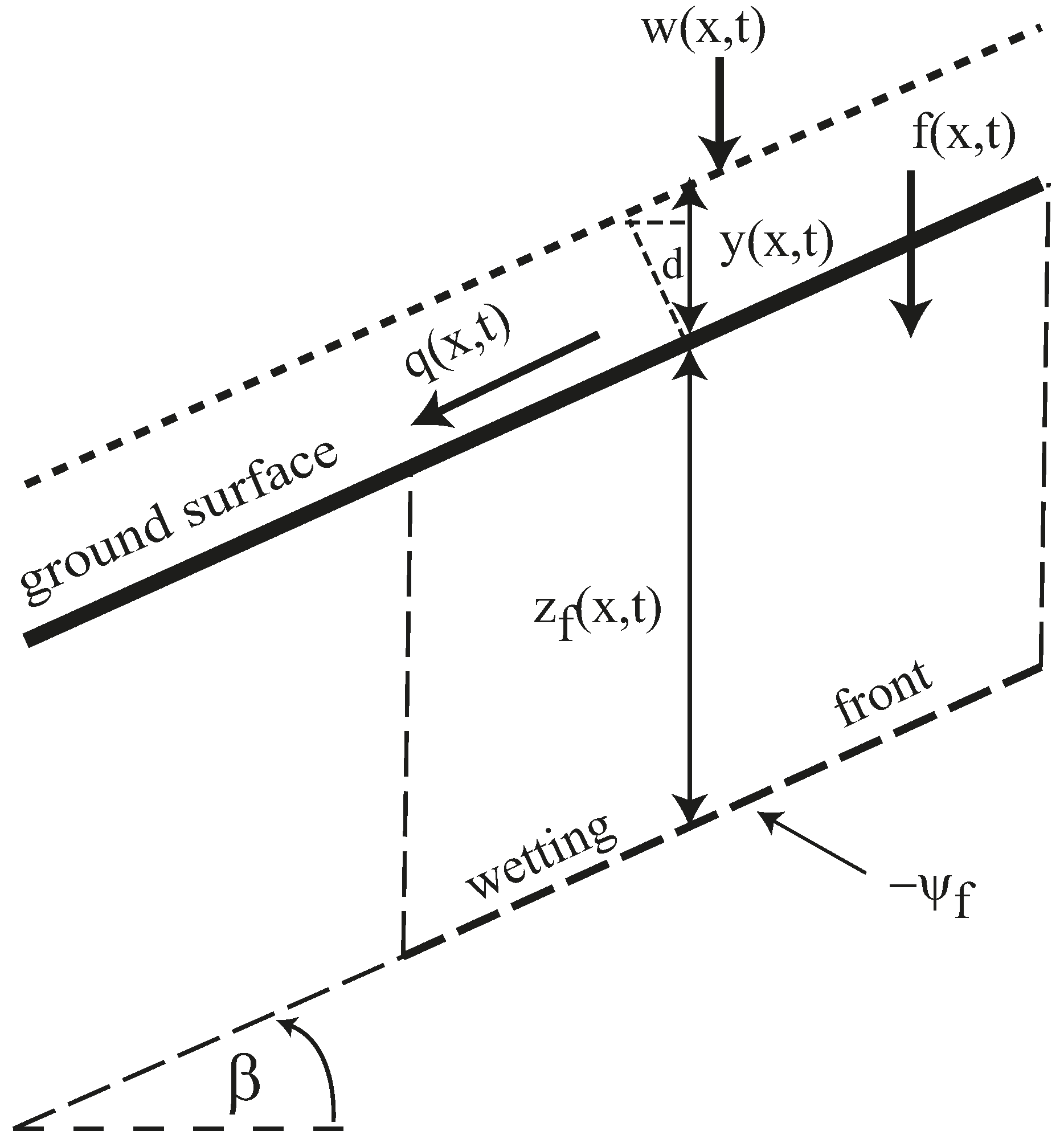
Figure 5 depicts an advancing wetting front on the sloping terrain. The antecedent soil-moisture deficit equals
, with
and
denoting the porosity and initial volumetric content of the slope soil, respectively. Prior to slope saturation, the soil’s (wet) unit weight equals
. The soil within the saturated thickness extending from the surface to the wetting-front depth has a saturated unit weight
.
Soil saturation occurs from the slope surface downwards. At some time, the effect of soil saturation by infiltrating rainfall reaches a slip surface along which soil mass slides. The classic translational sliding mechanism, on the other hand, assumes that slope failure is caused by rising saturation above the slip surface. The translational mechanism herein proposed is as follows. Prior to infiltration (i.e., with antecedent conditions prevailing), the factor of safety in the slope’s soil at an arbitrary depth
below the ground surface is given by the following expression (
denotes the factor of safety under antecedent conditions derived with effective-stress analysis):
in which
denotes the apparent cohesion in the soil created by soil water suction (negative pore pressure under unsaturated conditions).
The apparent cohesion stems exclusively from negative pore pressure and differs from the actual cohesion in cemented soils or in overconsolidated fine-grained soils [
5,
20]. Soils in which the slope angle
exceeds the soil’s angle of friction
may be stable due to apparent cohesion.
The soil pressure head developed by a downward-advancing wetting front equals
at the wetting front (see
Figure 5). The pressure head
is larger (that is, less negative) than the pressure head that prevails under antecedent conditions. Therefore, the apparent cohesion is reduced by infiltration to a value of
. This follows from a physical consideration of a soil’s characteristic curve relating pore pressure to its volumetric water content: as the volumetric water content increases, the pore pressure becomes less negative (increases), thus reducing the apparent cohesion. The reduced apparent cohesion
could be nil in clean, coarse, granular soils. This reduces or nullifies the first term on the right-hand side of Equation (47). There is a second effect that reduces the cohesion-related term on the right-hand side of Equation (47). This stems from the increased unit weight of the soil as it transitions from wet (or even dry conditions) to saturated conditions. The unit weight increases from
to
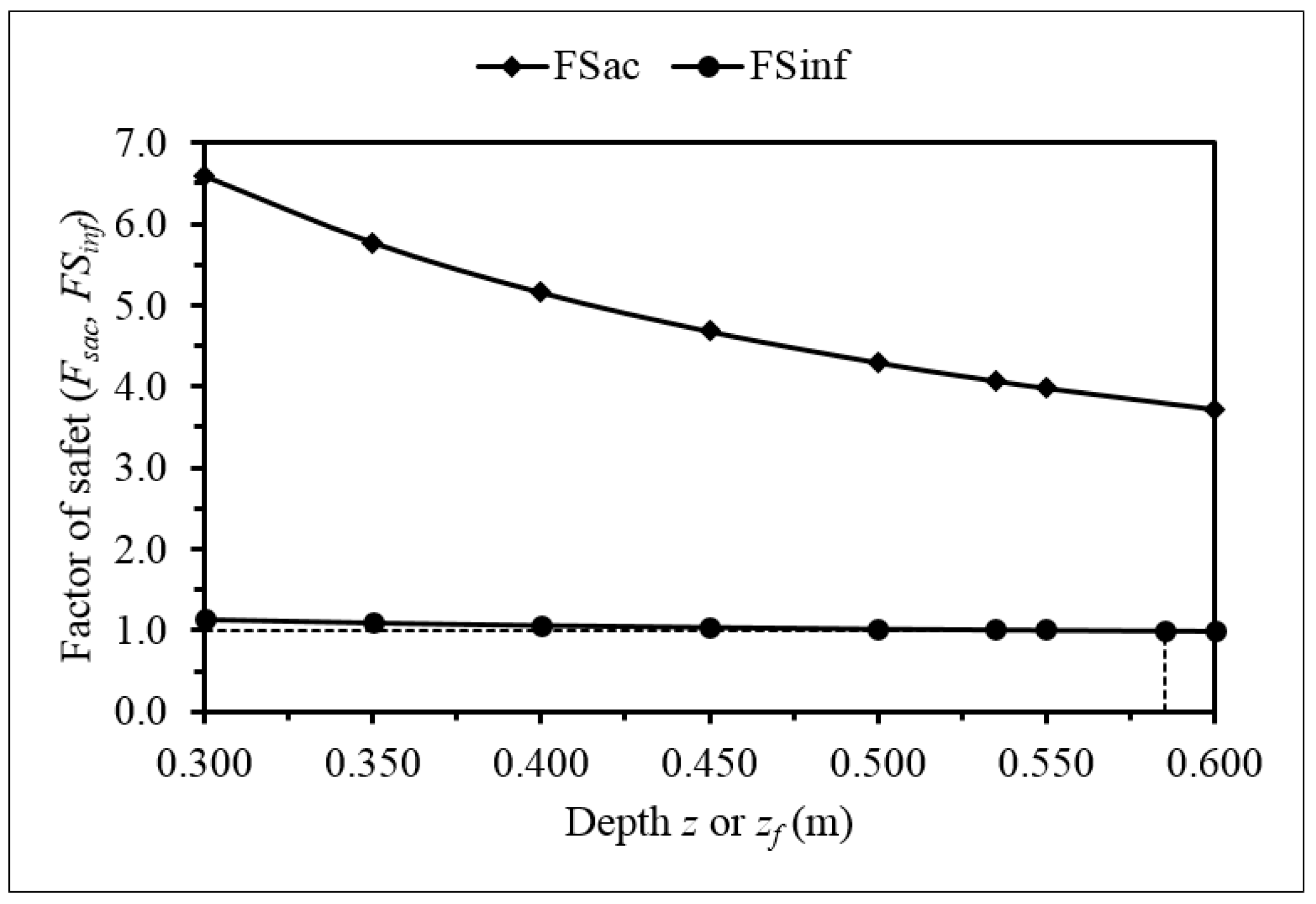
. The factor of safety on the wetting front after infiltration (
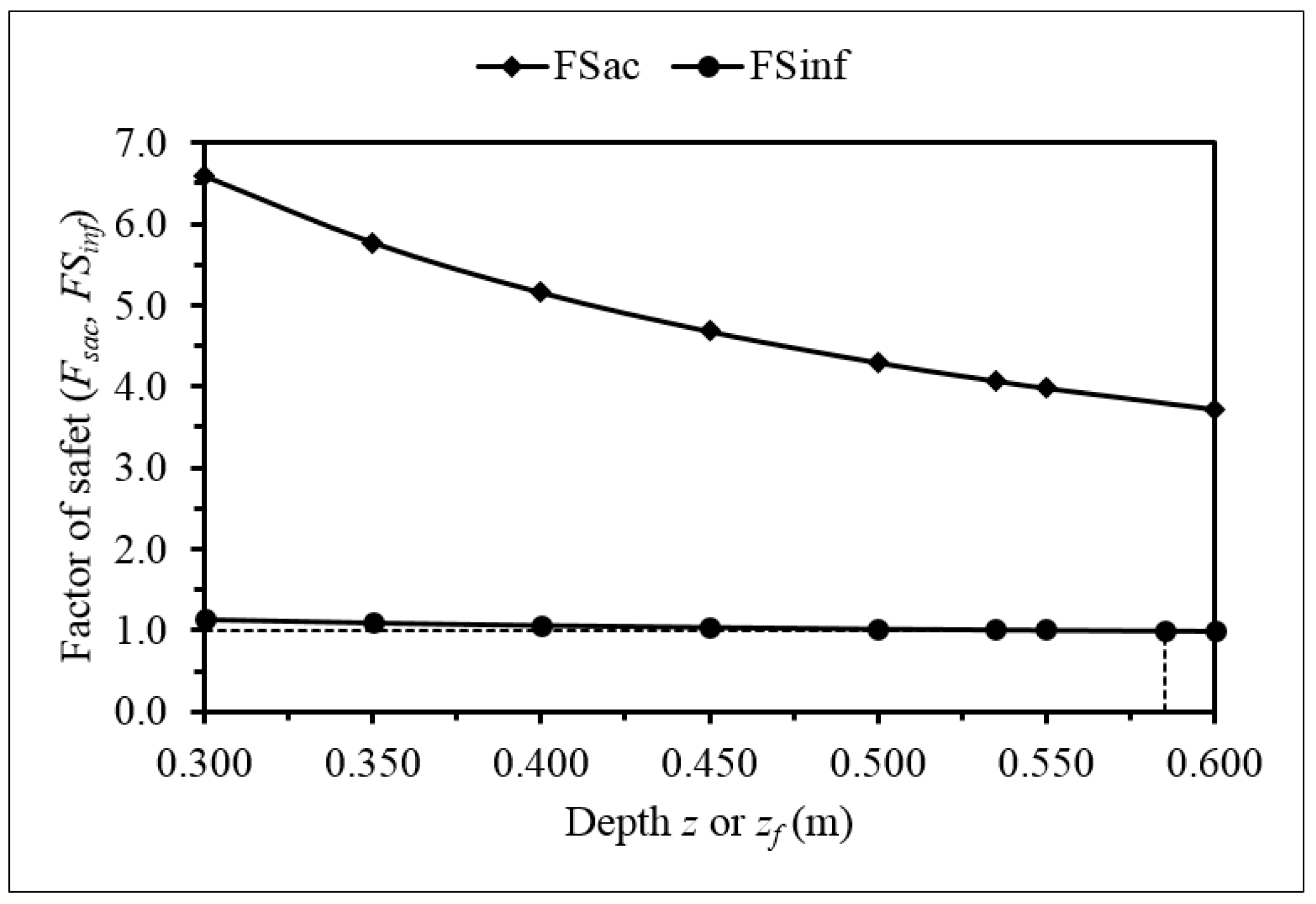
) becomes:
The factor of safety in Equation (48) may fall below a value of 1 in soils with a slope angle
larger than the angle of friction
. A failure condition at the wetting front is assured in this instance if the apparent cohesion vanishes altogether by infiltration, in which case the factor is reduced to the following minimum:
Equation (48) indicates that slope soils whose shear strength relies exclusively on apparent cohesion are particularly vulnerable to translational sliding as the wetting front advances downward. This vulnerability is heightened if dynamic forces are applied during slope wetting [
7]. The following section presents the computational results for this paper’s methodology.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}