Experimental and Numerical Analysis of a Water Emptying Pipeline Using Different Air Valves

 ,
,  ,
,  and
and 
Abstract
:1. Introduction
2. Mathematical Model
2.1. Equations for the Water Phase
- Mass oscillation equation:The rigid model was used in order to compute the evolution of the water column [11,25], considering that the elasticity of the air is much higher than the elasticity of the pipe and the water [12]. Applying the rigid model to the emptying column j and considering that the drain valve s joins pipes and , which is a common point in a pipeline, then:where is the elevation difference (m), is the water density (), is the atmospheric pressure (101,325 Pa) and g is the gravity acceleration ().The expression was used to estimate the local loss of the drain valve s in Equation (1). is the flow factor and is the water discharge.If the drain valve only connects pipe , thus .
- Air–water interface position:
2.2. Equations for Air Pockets
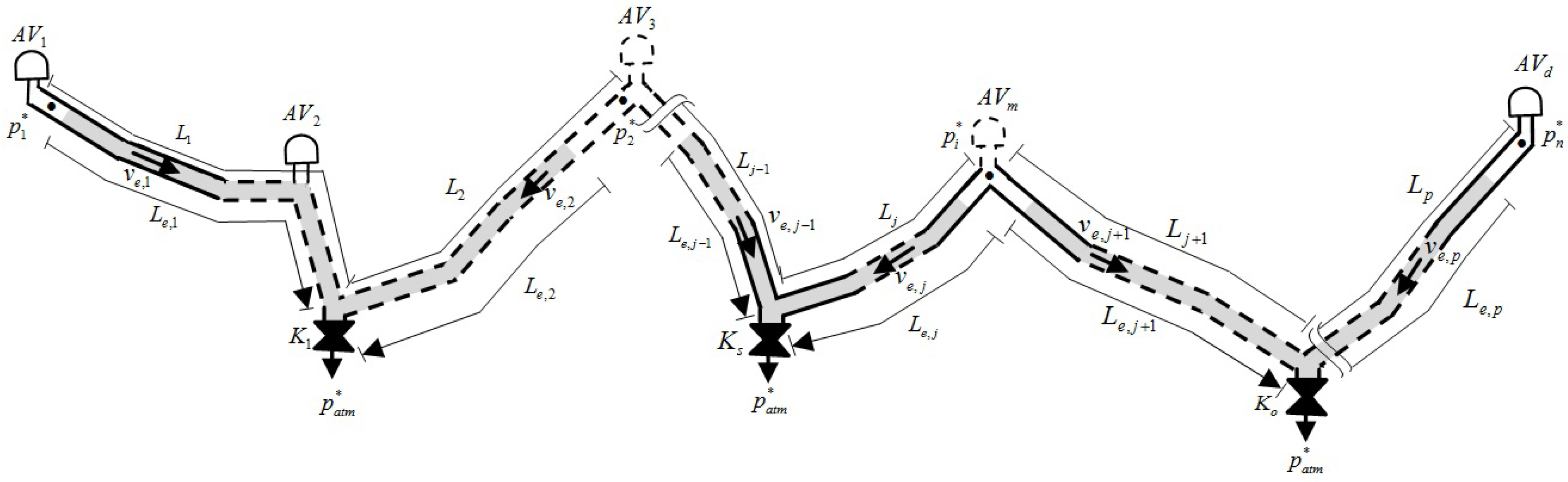
- Continuity equation [3,17]:and by deriving:where is the air mass and is the air volume of the air pocket i.Due to the air pocket i located between pipes and , then and , thus:where is the air density of the air pocket i, is the air density in normal conditions ( ), is the cross section area () of the air valve m and is the air velocity in normal conditions admitted by the air valve m.
- Expansion equation for the air pocket i:Considering the equations presented before, then:where k is the polytropic coefficient: if , then the process is isothermal, but, if , the process is adiabatic.In Equations (5) and (7), if the air pocket i is only located in pipe , then and .
- Air valve characterization:
2.3. Initial and Boundary Conditions
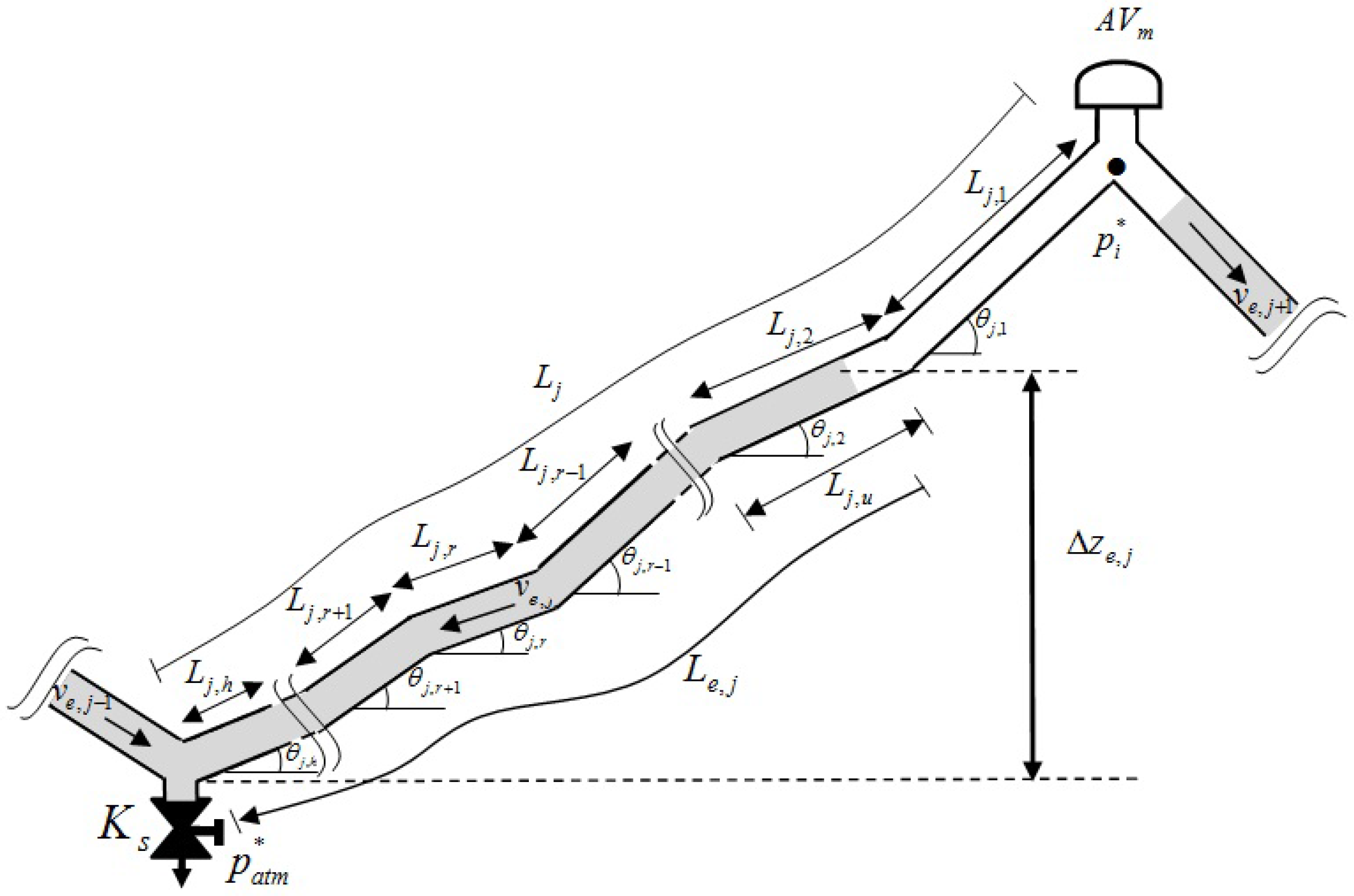
2.4. Gravity Term
- When the air–water interface has not arrived the last reach ():
- When the air–water interface is located on the last reach ():
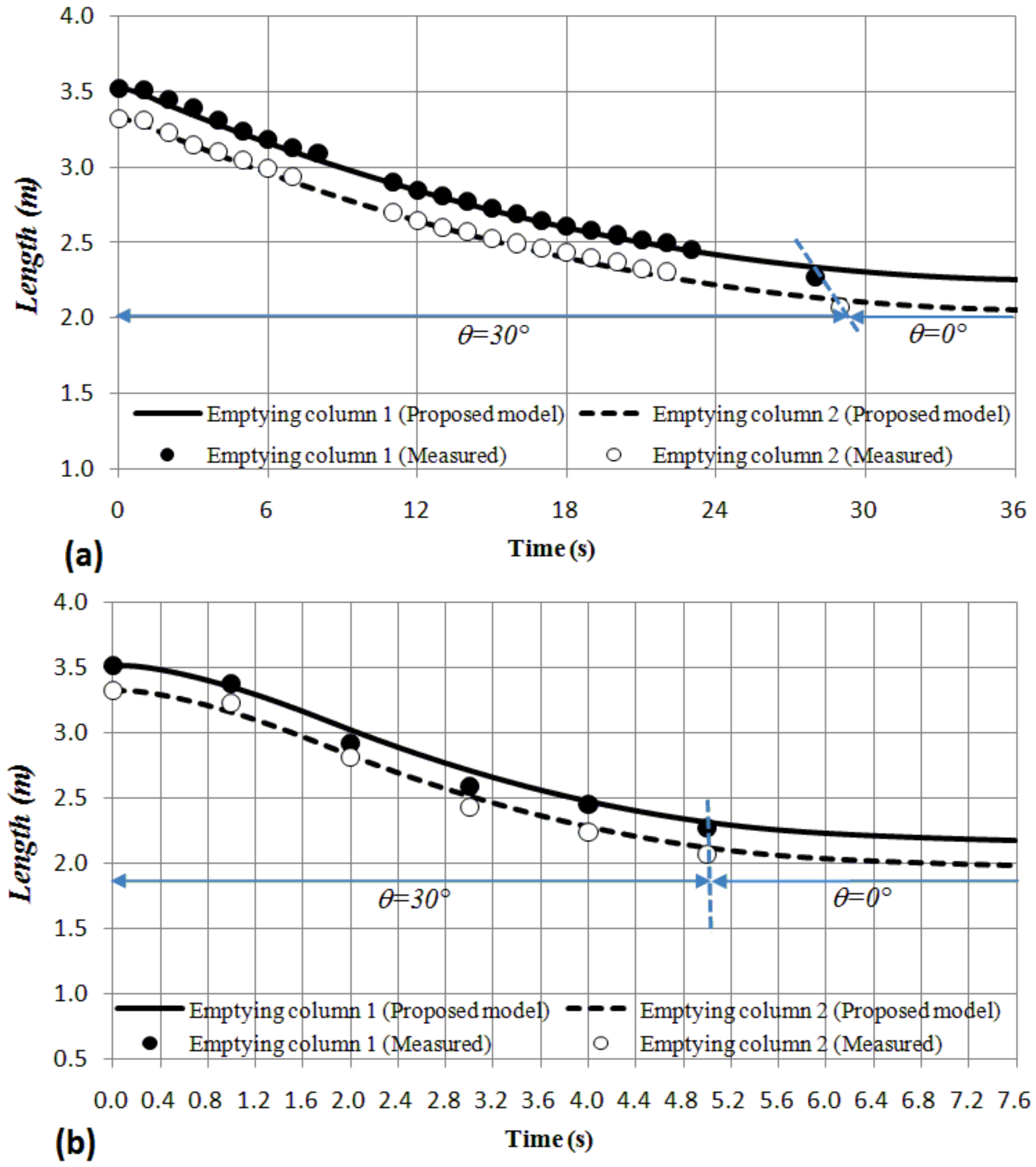
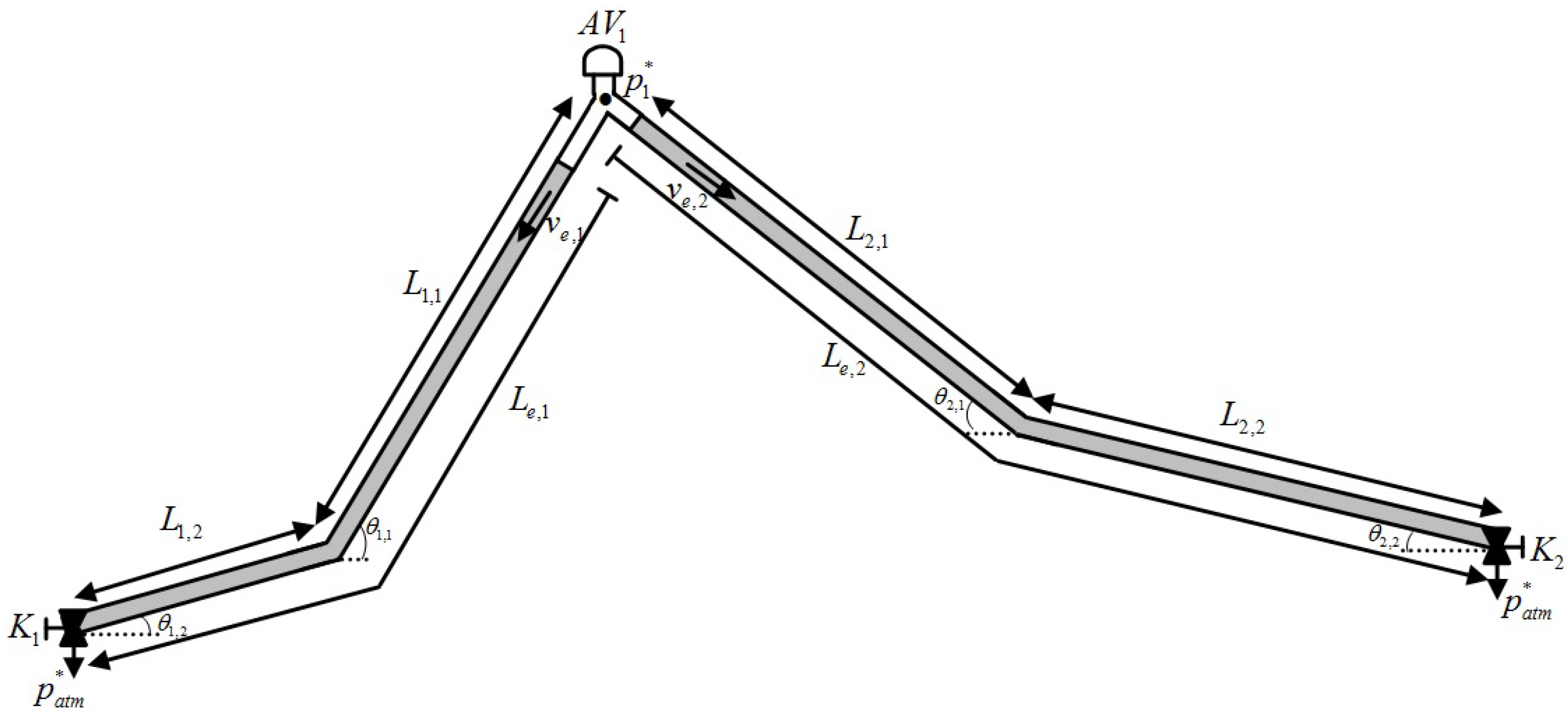
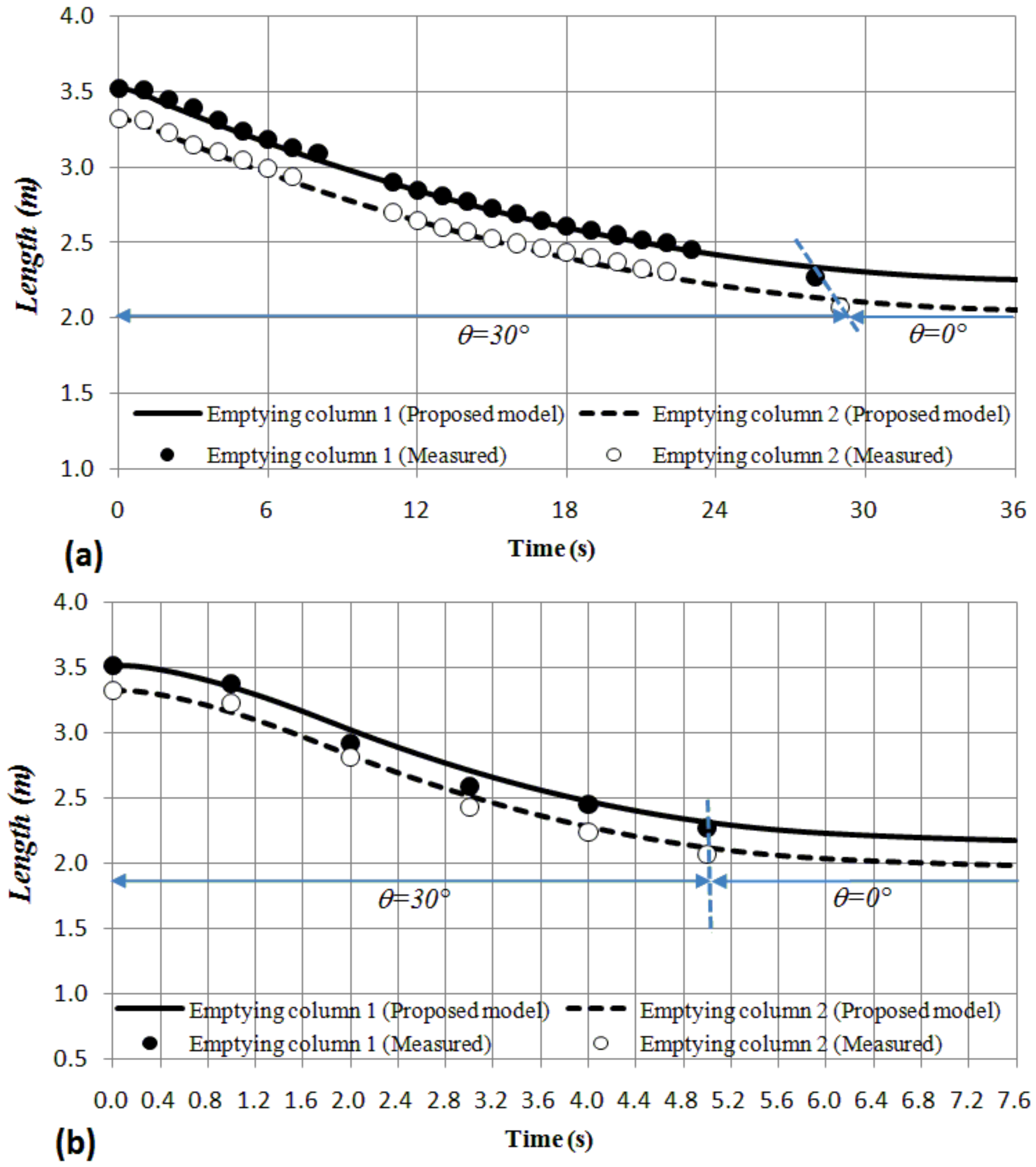
3. Application to Two Emptying Columns
- Mass oscillation equation applied to the emptying column 1
- Emptying column 1 position
- Mass oscillation equation applied to the emptying column 2
- Emptying column 2 position
- Evolution of the air pocket
- Continuity equation of the air pocket
- Air valve characterization
3.1. Experimental Model
- If the air-water interface located on the sloped pipe reaches ( and ), then:
- If the air–water interface located on the horizontal pipe reaches ( and ), then:
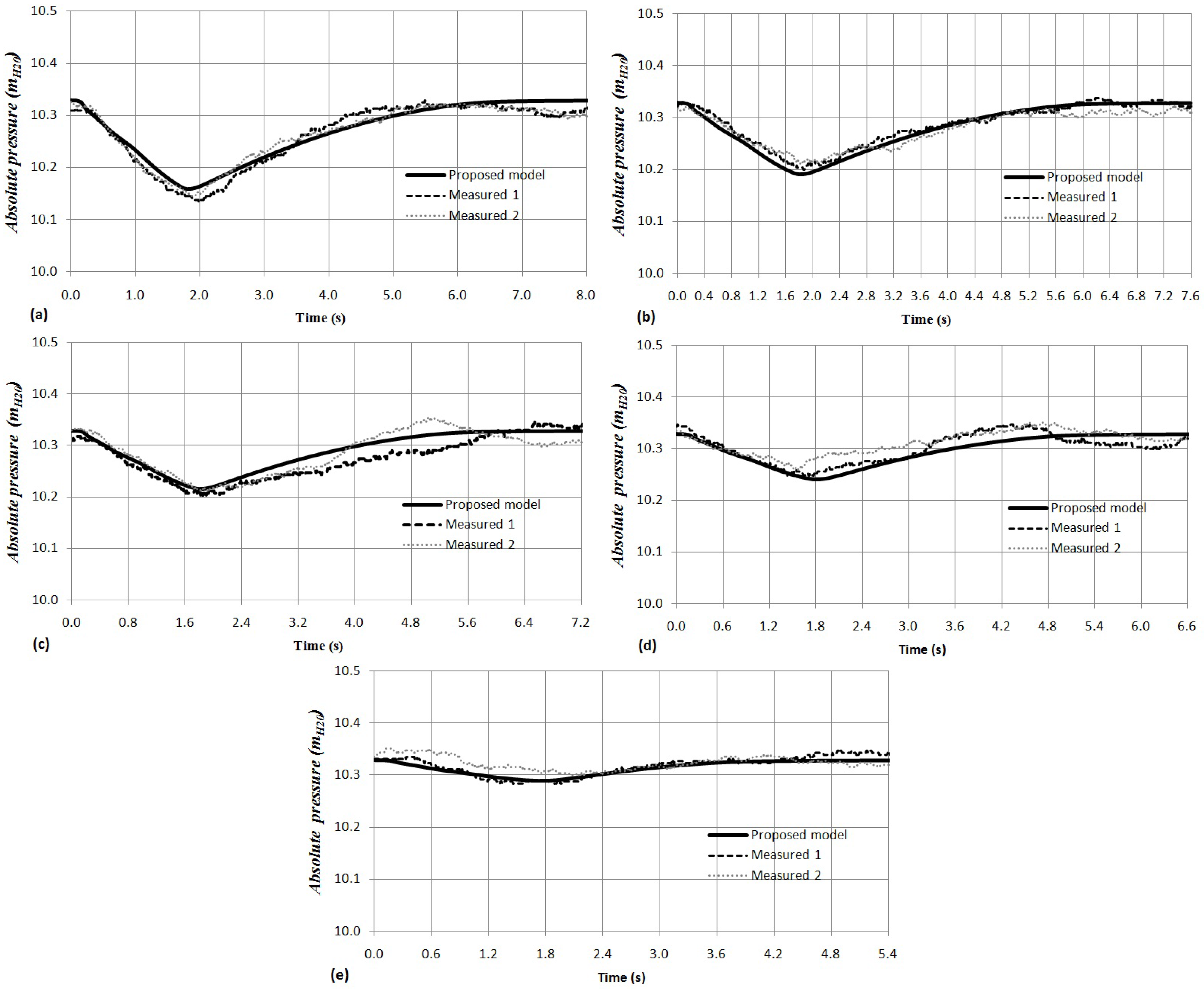
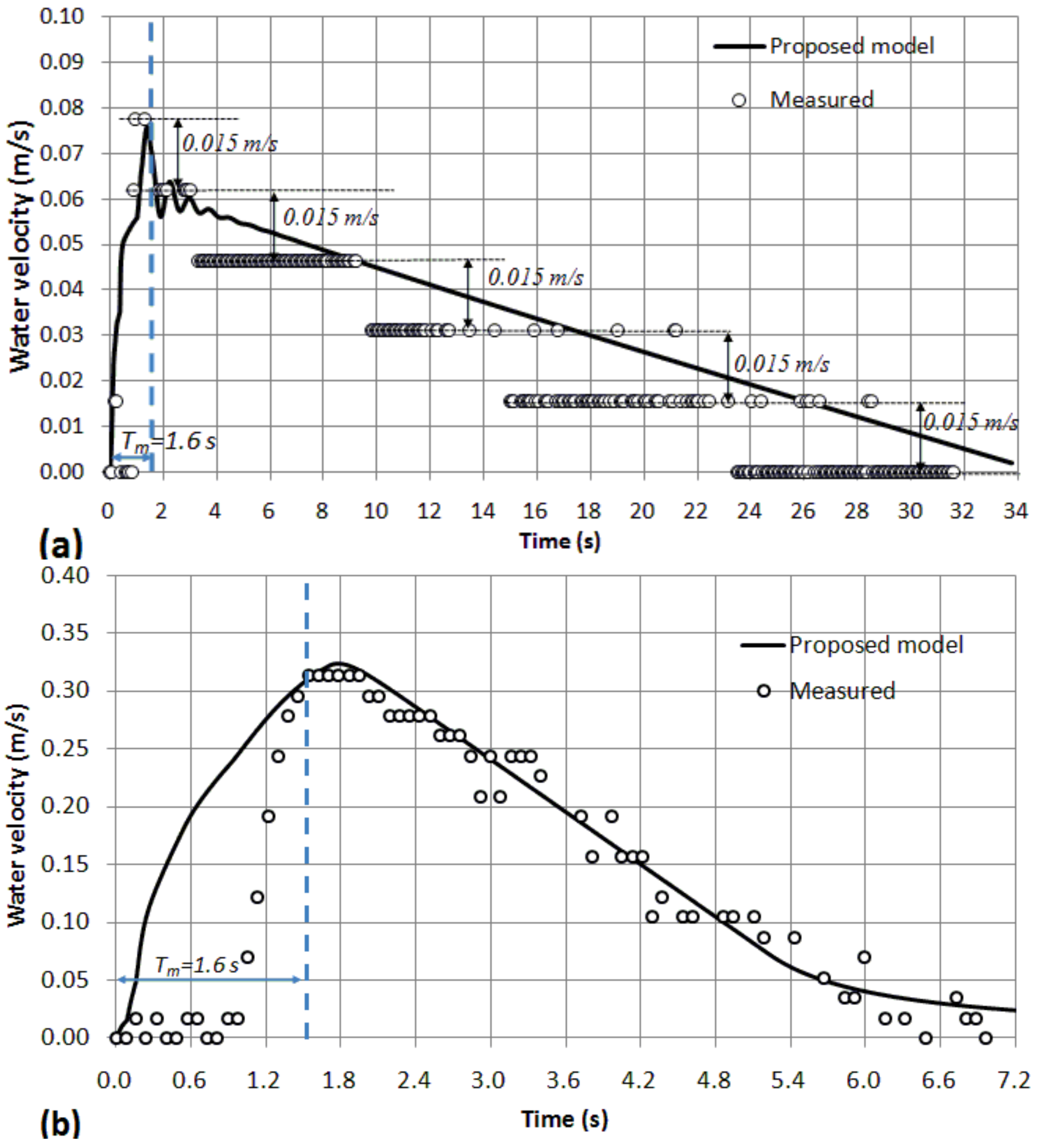
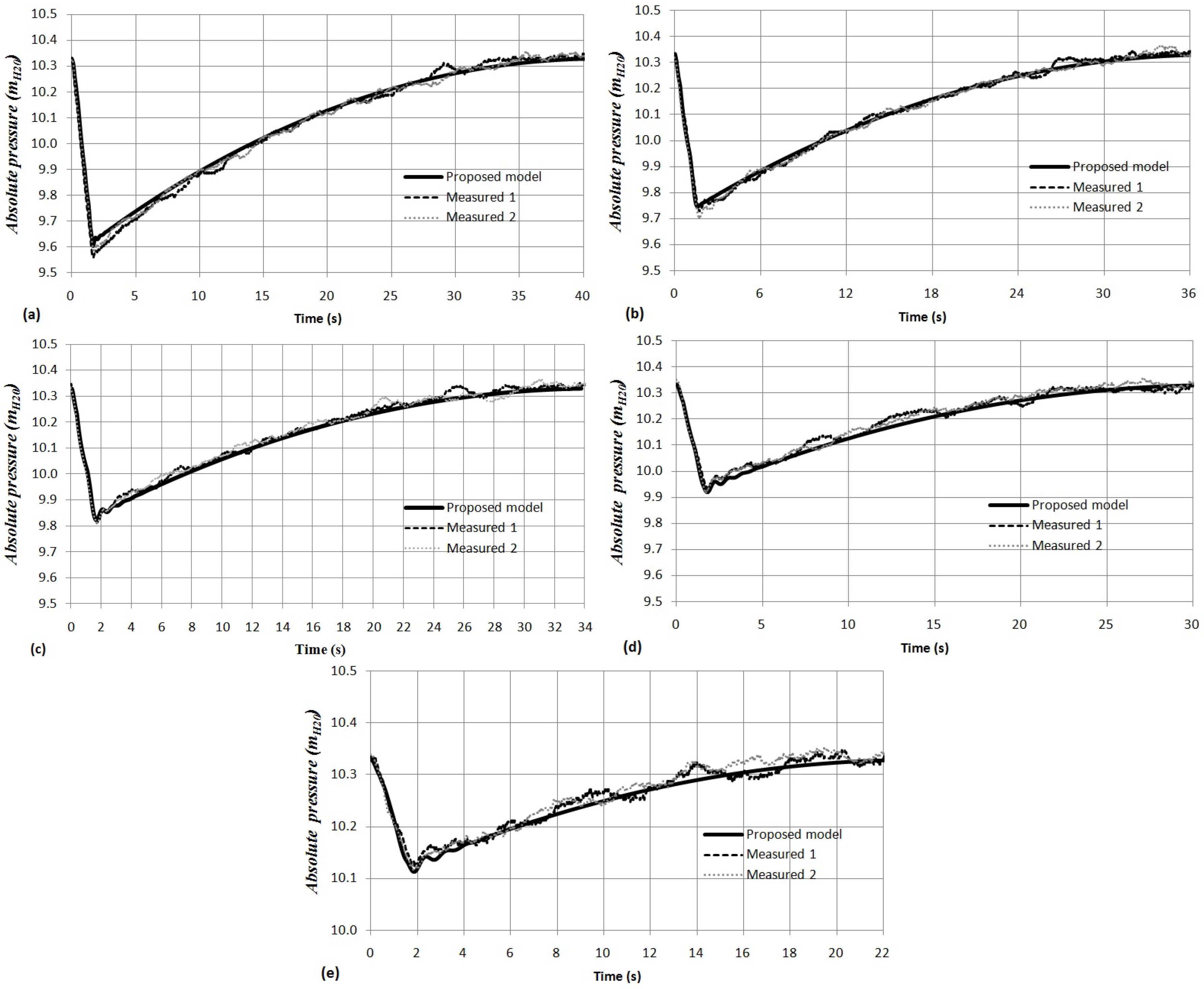
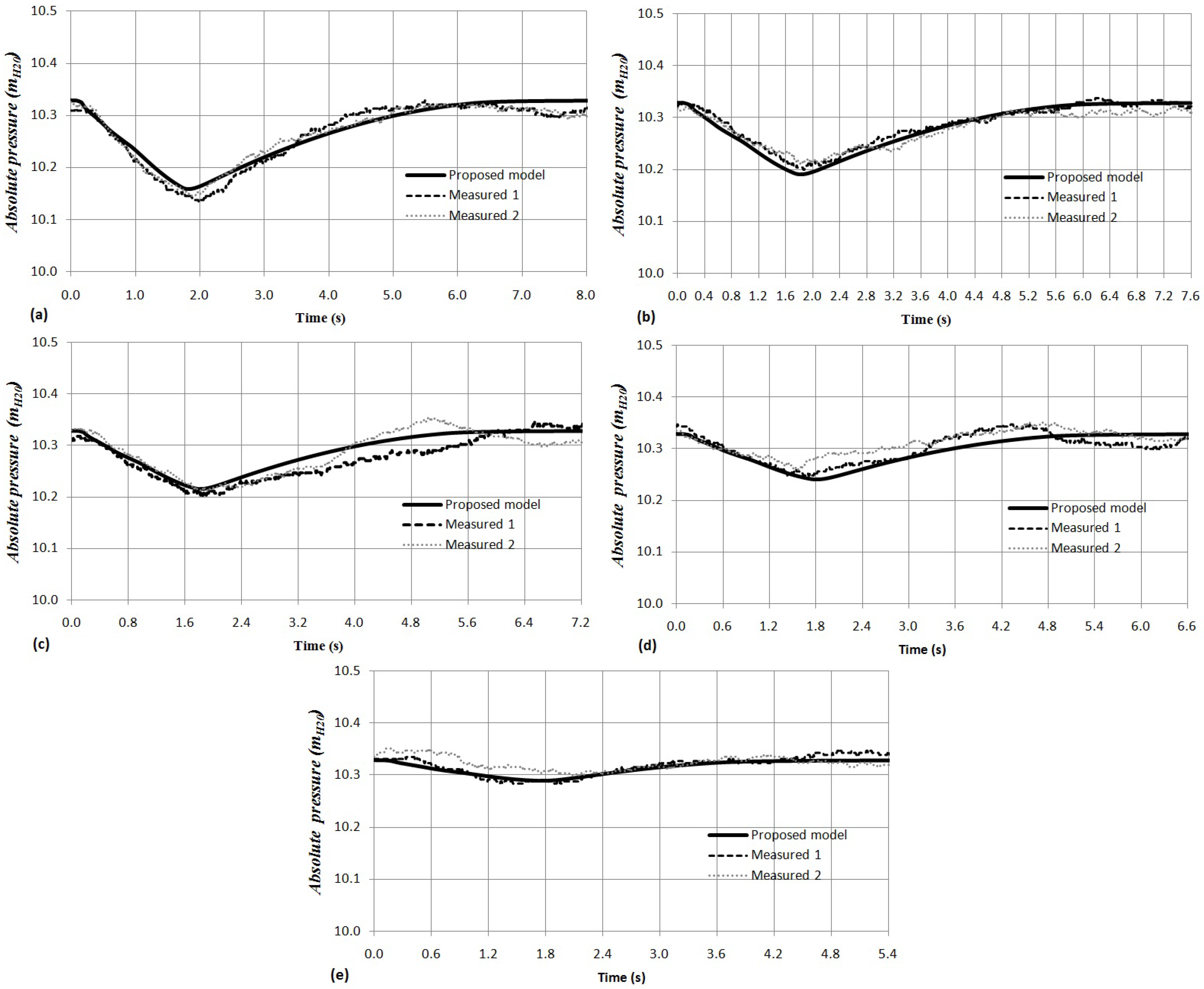
3.2. Experimental Results and Model Verification
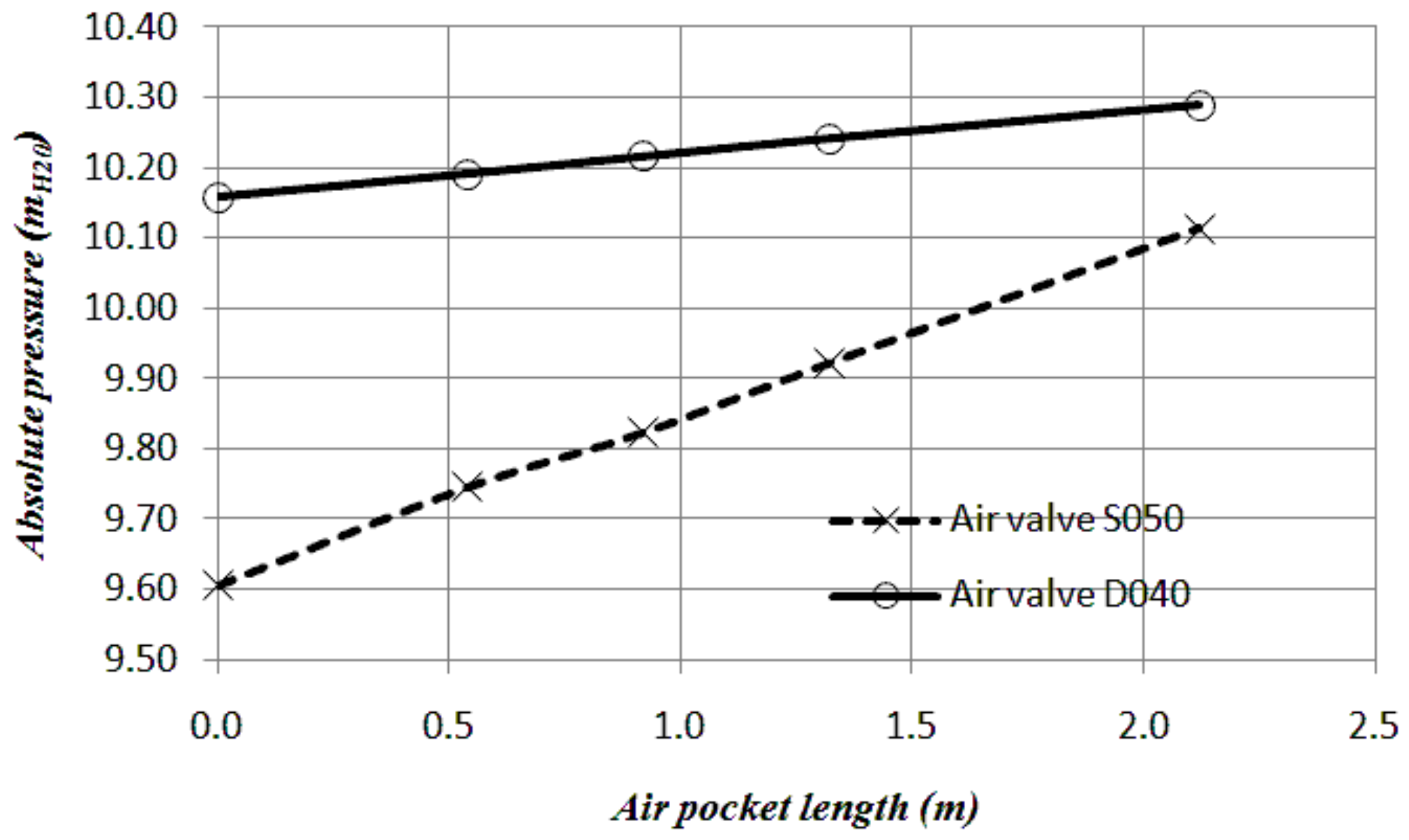
3.3. Sensitivity Analysis
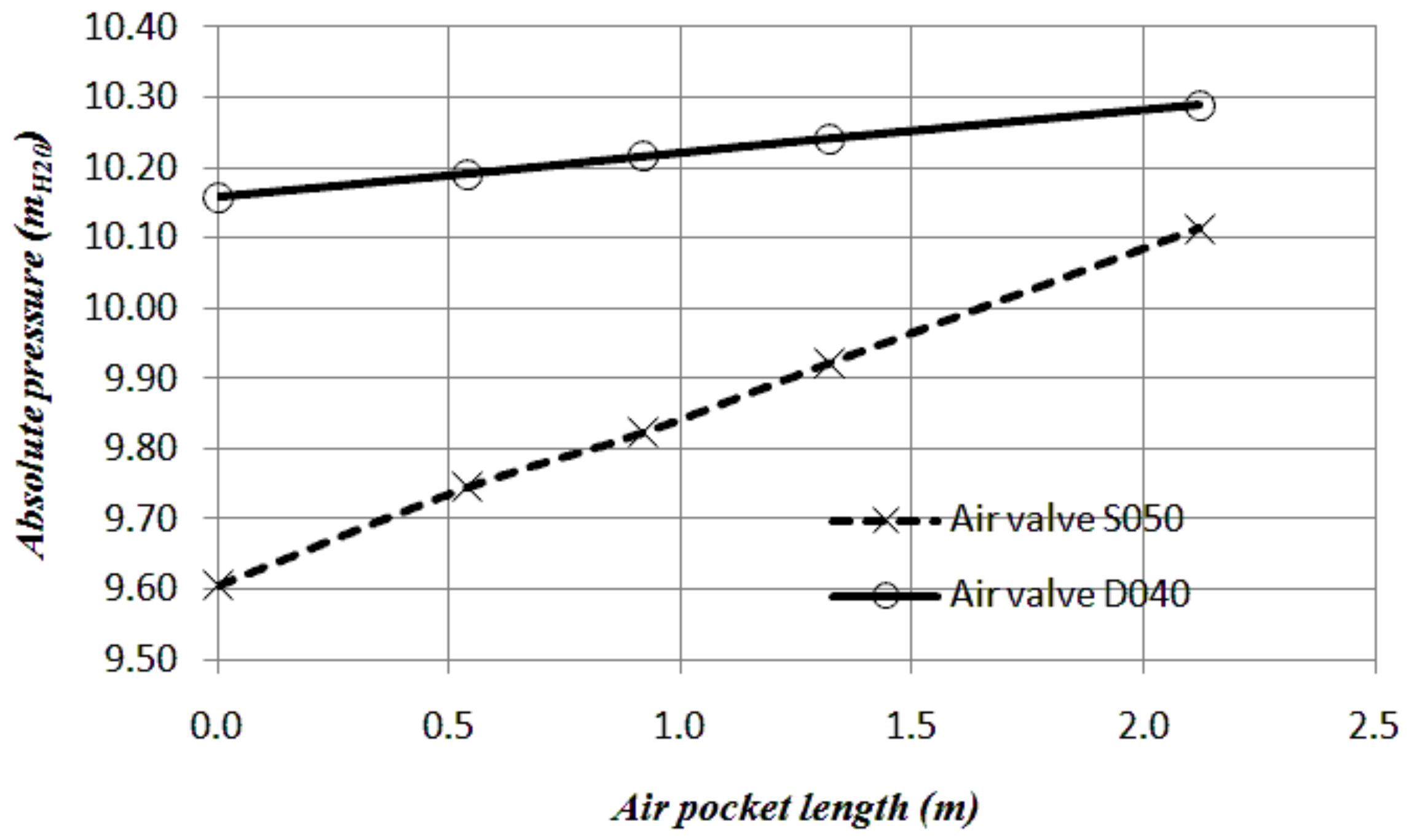
3.3.1. Effect of Air Pocket Sizes
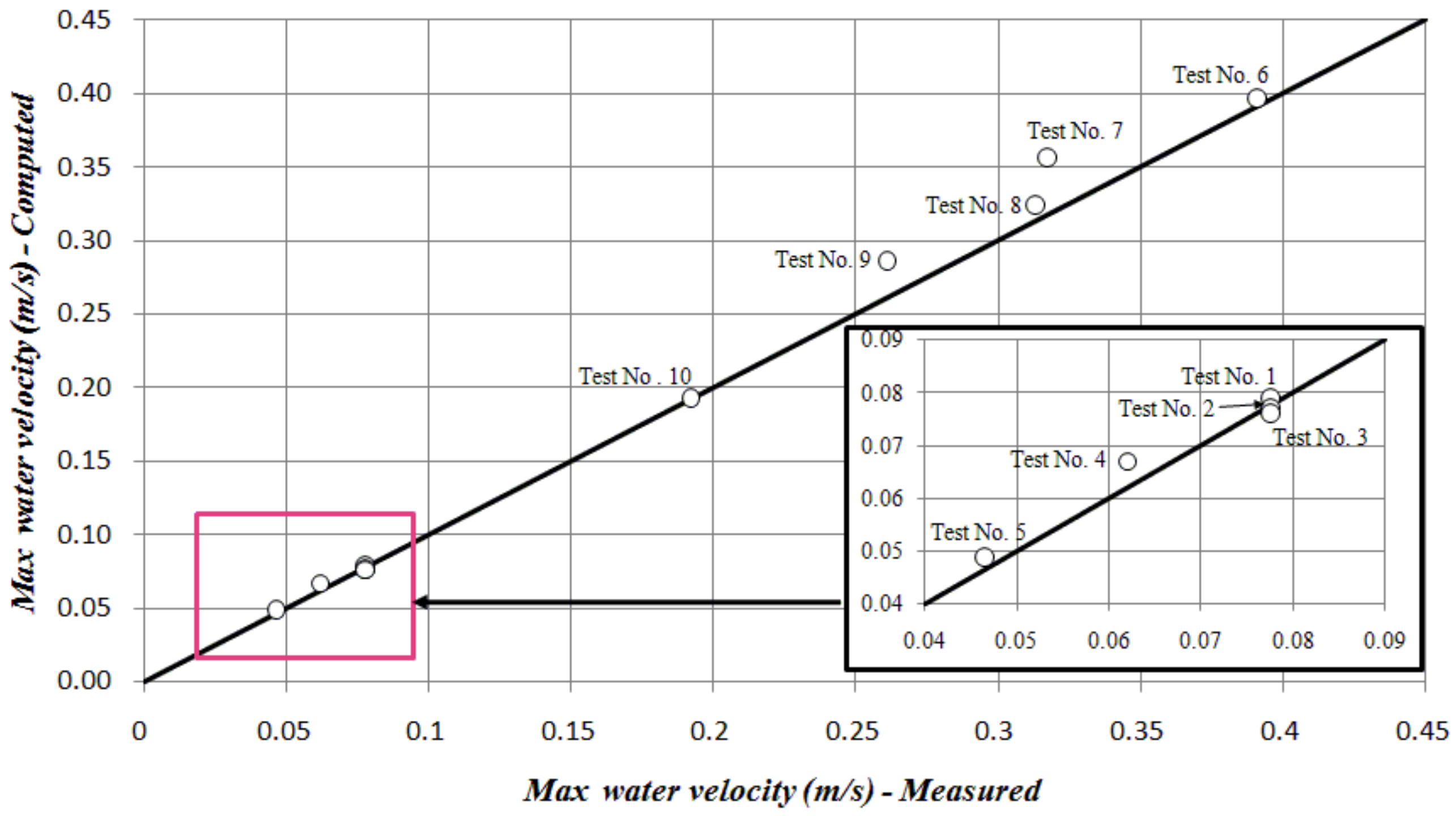
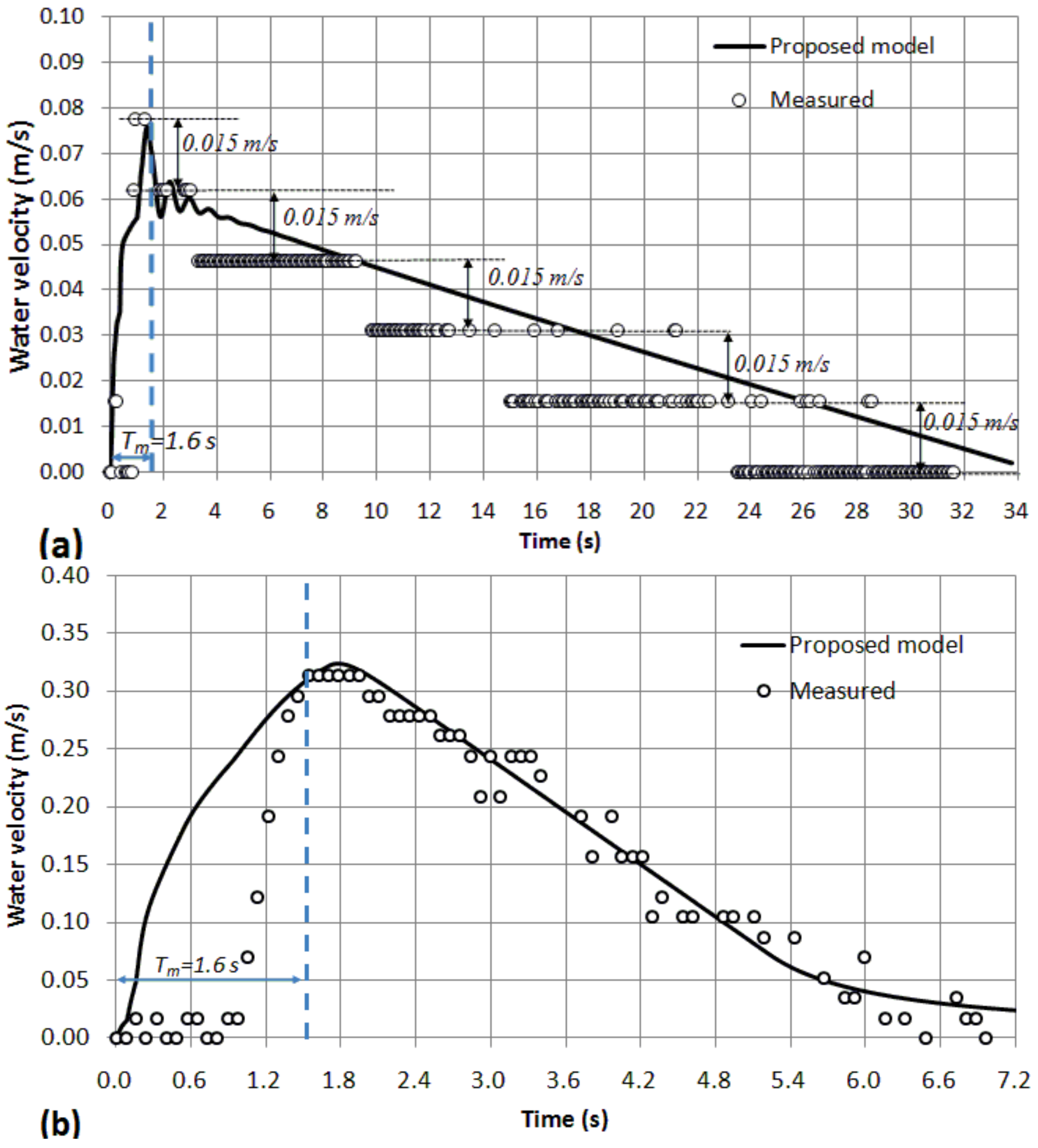
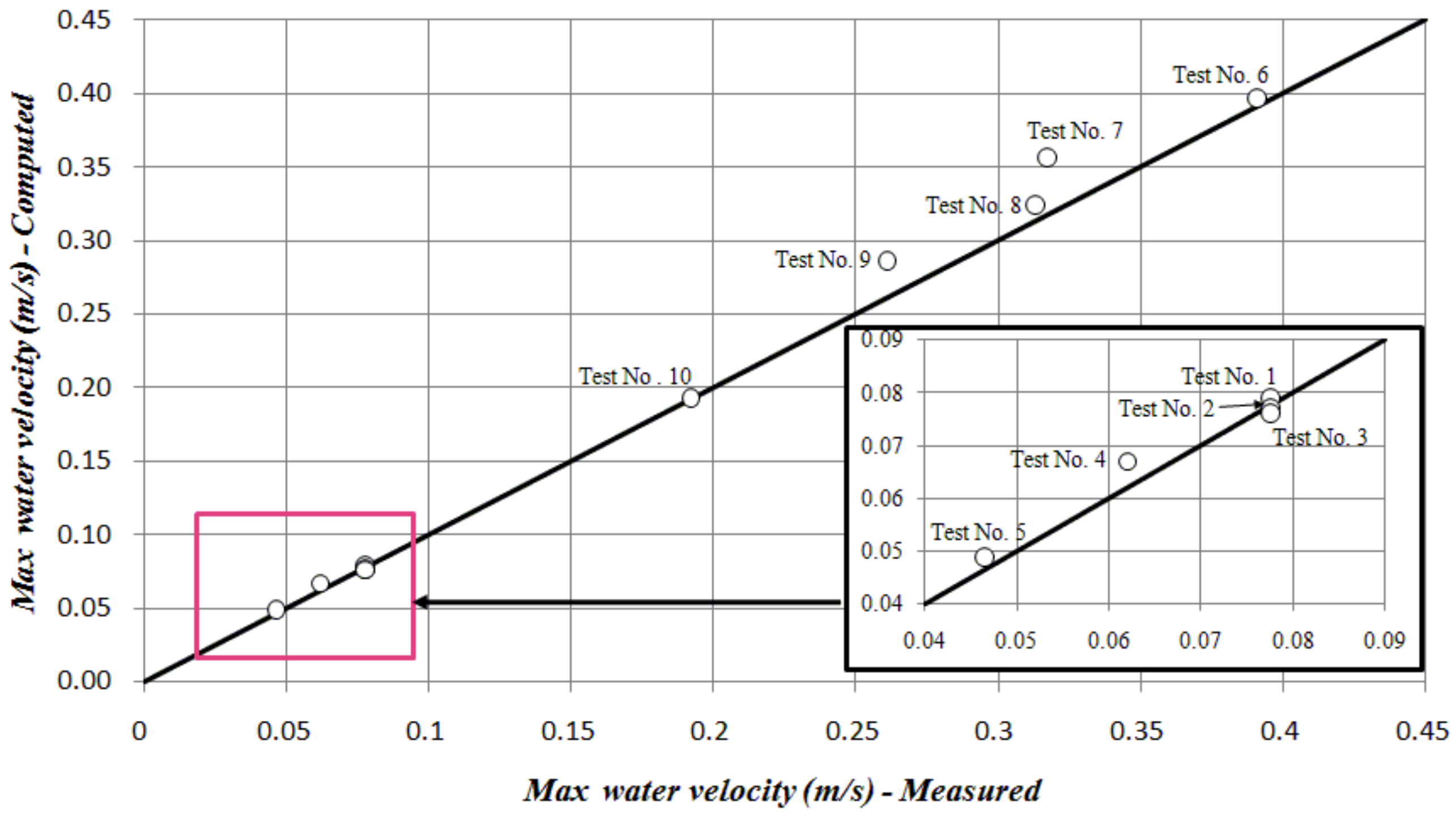
3.3.2. Maximum Water Velocity
4. Conclusions
- The proposed model can be used for planning the emptying operations in pipelines with undulating profiles, considering their limitations.
- The expansion of the air pocket produces minimum subatmospheric pressure. In order to control these effects, air valves should be installed in pipelines.
- It is very important to have a correct selection of air valves for vacuum protection for emptying pipelines. An inadequate selection produces both lower values of subatmospheric pressure and a slower drainage of the system. On the other hand, a larger air valve orifice size reduces the lowest values of subatmospheric pressures.
- Engineers should consider the initial condition in which the pipeline is completely filled, which is the most critical condition, since the smallest air pocket sizes produce the lowest subatmospheric pressures.
Supplementary Materials
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| A | Cross sectional area of the pipe () |
| Cross section area of the air valve m () | |
| Inflow discharge coefficient of the air valve m (–) | |
| D | Internal pipe diameter (m) |
| f | Darcy–Weisbach friction factor (–) |
| g | Gravity acceleration () |
| Length of the emptying column j (m) | |
| Total length of the pipe j (m) | |
| k | Polytropic coefficient (–) |
| Flow factor of the drain valve s (/s) with a pressure drop of 1 | |
| Local loss of the drain valve s (m) | |
| Air mass of the air pocket i (kg) | |
| Absolute pressure of the air pocket i (Pa) | |
| Atmospheric pressure (Pa) | |
| t | Time (s) |
| Valve maneuvering time (s) | |
| Air discharge in normal conditions admitted by the air valve m () | |
| Water discharge by the drain valve s () | |
| Air volume of the air pocket i () | |
| Water velocity of the emptying column j (m/s) | |
| Air velocity in normal conditions admitted by the air valve m (m/s) | |
| Length of the air pocket i (m) | |
| Elevation difference (m) | |
| Air density of the air pocket i () | |
| Air density in normal conditions () | |
| Water density (kg/m) | |
| Ball valve | |
| Manual ball valve | |
| Absolute pressure transducer | |
| Superscripts | |
| Absolute values | |
| Subscripts | |
| a | Refers to air |
| i | Refers to air pocket |
| j | Refers to pipe |
| m | Refers to air valve |
| Normal conditions | |
| w | Refers to water |
| 0 | Initial condition |
References
- American Water Works Association (AWWA). Manual of Water Supply Practices—M51: Air-Release, Air-Vacuum, and Combination Air Valves, 1st ed.; American Water Works Association: Denver, CO, USA, 2001. [Google Scholar]
- Ramezani, L.; Karney, B.; Malekpour, A. The Challenge of Air Valves: A Selective Critical Literature Review. J. Water Resour. Plan. Manag. 2016, 141. [Google Scholar] [CrossRef]
- Fuertes-Miquel, V.S.; Coronado-Hernández, O.E.; Iglesias-Rey, P.L.; Mora-Melia, D. Transient phenomenon during the emptying process of a single pipe with water-air interaction. J. Hydraul. Res. 2016. submitted. [Google Scholar]
- Tijsseling, A.; Hou, Q.; Bozkuş, Z.; Laanearu, J. Improved One-Dimensional Models for Rapid Emptying and Filling of Pipelines. J. Press. Vessel Technol. 2016, 138, 031301. [Google Scholar] [CrossRef]
- Laanearu, J.; Annus, I.; Koppel, T.; Bergant, A.; Vučković, S.; Hou, Q.; Tijsseling, A.; Anderson, A.; Van’t Westende, J. Emptying of large-scale pipeline by pressurized air. J. Hydraul. Eng. 2012, 138, 1090–1100. [Google Scholar] [CrossRef]
- Fuertes, V.S. Hydraulic Transients with Entrapped Air Pockets. Ph.D. Thesis, Department of Hydraulic Engineering, Polytechnic University of Valencia, Valencia, Spain, 2001. [Google Scholar]
- Besharat, M.; Tarinejad, R.; Ramos, H.M. The effect of water hammer on a confined air pocket towards flow energy storage system. J. Water Supply Res. Technol. AQUA 2016, 65, 116–126. [Google Scholar] [CrossRef]
- Apollonio, C.; Balacco, G.; Fontana, N.; Giugni, M.; Marini, G.; Piccinni, A.F. Hydraulic Transients Caused by Air Expulsion during Rapid Filling of Undulating Pipelines. Water 2016, 8, 25. [Google Scholar] [CrossRef]
- Balacco, G.; Apollonio, C.; Piccinni, A.F. Experimental Analysis of Air Valve Behaviour During Hydraulic Transients. J. Appl. Water Eng. Res. 2015, 3, 3–11. [Google Scholar] [CrossRef]
- Zhou, L.; Liu, D.; Karney, B. Investigation of hydraulic transients of two entrapped air pockets in a water pipeline. J. Hydraul. Eng. 2013, 139, 949–959. [Google Scholar] [CrossRef]
- Izquierdo, J.; Fuertes, V.S.; Cabrera, E.; Iglesias, P.; García-Serra, J. Pipeline start-up with entrapped air. J. Hydraul. Res. 1999, 37, 579–590. [Google Scholar] [CrossRef]
- Zhou, L.; Liu, D.; Ou, C. Simulation of flow transients in a water filling pipe containing entrapped air pocket with VOF model. Eng. Appl. Comput. Fluid Mech. 2011, 5, 127–140. [Google Scholar] [CrossRef]
- Martins, N.M.C.; Soares, A.K.; Ramos, H.M.; Covas, D.I.C. CFD modeling of transient flow in pressurized pipes. Comput. Fluids 2016, 126, 129–140. [Google Scholar] [CrossRef]
- Abreu, J.; Cabrera, E.; Izquierdo, J.; García-Serra, J. Flow Modeling in Pressurized Systmes Revisited. J. Hydraul. Eng. 1999, 125, 1154–1169. [Google Scholar] [CrossRef]
- Martins, S.C.; Ramos, H.M.; Almeida, A.B. Mathematical Modeling of Pressurized System Behaviour with Entrapped Air. In Environmental Hydraulics: Theoretical, Experimental and Computational Solutions; CRC Press: Boca Raton, FL, USA, 2010; pp. 61–64. [Google Scholar]
- Martins, S.C.; Ramos, H.M.; Almeida, A.B. Computational Evaluation of Hydraulic System Behaviour with Entrapped Air under Rapid Pressurization; Integrating Water Systems; CRC Press: Boca Raton, FL, USA, 2010; pp. 241–247. [Google Scholar]
- Fuertes-Miquel, V.S.; López-Jiménez, P.A.; Martínez-Solano, F.J.; López-Patiño, G. Numerical modelling of pipelines with air pockets and air valves. Can. J. Civ. Eng. 2016, 43, 1052–1061. [Google Scholar] [CrossRef]
- Zhou, L.; Liu, D. Experimental investigation of entrapped air pocket in a partially full water pipe. J. Hydraul. Res. 2013, 51, 469–474. [Google Scholar] [CrossRef]
- Covas, D.; Stoianov, I.; Ramos, H.M.; Graham, N.; Maksimovic̀, C.; Butler, D. Water hammer in pressurized polyethylene pipes:conceptual model and experimental analysis. Urban Water J. 2010, 1, 177–197. [Google Scholar] [CrossRef]
- Liou, C.; Hunt, W.A. Filling of pipelines with undulating elevation profiles. J. Hydraul. Eng. 1996, 122, 534–539. [Google Scholar] [CrossRef]
- Bousso, S.; Daynou, M.; Fuamba, M. Numerical Modeling of Mixed Flows in Storm Water Systems: Critical Review of Literature. J. Hydraul. Eng. 2013, 139, 385–396. [Google Scholar] [CrossRef]
- Leon, A.; Ghidaoui, M.; Schmidt, A.; Garcia, M. A robust two-equation model for transient-mixed flows. J. Hydraul. Res. 2010, 48, 44–56. [Google Scholar] [CrossRef]
- Wylie, E.; Streeter, V. Fluid Transients in Systems; Prentice Hall: Englewood Cliffs, NJ, USA, 1993. [Google Scholar]
- Vasconcelos, J.G.; Wright, S.J. Rapid Flow Startup in Filled Horizontal Pipelines. J. Hydraul. Eng. 2008, 134, 984–992. [Google Scholar] [CrossRef]
- Cabrera, E.; Abreu, J.; Pérez, R.; Vela, A. Influence of Liquid Length Variation in Hydraulic Transients. J. Hydraul. Res. 1992, 118, 1639–1650. [Google Scholar] [CrossRef]
- Zhou, L.; Liu, D.; Karney, B. Phenomenon of white mist in pipelines rapidly filling with water with entrapped air pocket. J. Hydraul. Eng. 2013, 139, 1041–1051. [Google Scholar] [CrossRef]
- Martins, S.C.; Ramos, H.M.; Almeida, A.B. Conceptual analogy for modelling entrapped air action in hydraulic systems. J. Hydraul. Res. 2015, 53, 678–686. [Google Scholar] [CrossRef]
- Martin, C.S. Entrapped Air in Pipelines. In Proceedings of the Second International Conference on Pressure Surges, London, UK, 22–24 September 1976.
- Iglesias-Rey, P.L.; Fuertes-Miquel, V.S.; García-Mares, F.J.; Martínez-Solano, F.J. Comparative Study of Intake and Exhaust Air Flows of Different Commercial Air Valves. In Proceedings of the 16th Conference on Water Distribution System Analysis, WDSA 2014, Bari, Italy, 14–17 July 2014; pp. 1412–1419.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test No. | Air Valve Model | Air Pocket Length (m) |
|---|---|---|
| 1 | ||
| 2 | ||
| 3 | ||
| 4 | ||
| 5 | ||
| 6 | ||
| 7 | ||
| 8 | ||
| 9 | ||
| 10 |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license ( http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Coronado-Hernández, O.E.; Fuertes-Miquel, V.S.; Besharat, M.; Ramos, H.M. Experimental and Numerical Analysis of a Water Emptying Pipeline Using Different Air Valves. Water 2017, 9, 98. https://doi.org/10.3390/w9020098
Coronado-Hernández OE, Fuertes-Miquel VS, Besharat M, Ramos HM. Experimental and Numerical Analysis of a Water Emptying Pipeline Using Different Air Valves. Water. 2017; 9(2):98. https://doi.org/10.3390/w9020098
Chicago/Turabian StyleCoronado-Hernández, Oscar E., Vicente S. Fuertes-Miquel, Mohsen Besharat, and Helena M. Ramos. 2017. "Experimental and Numerical Analysis of a Water Emptying Pipeline Using Different Air Valves" Water 9, no. 2: 98. https://doi.org/10.3390/w9020098
APA StyleCoronado-Hernández, O. E., Fuertes-Miquel, V. S., Besharat, M., & Ramos, H. M. (2017). Experimental and Numerical Analysis of a Water Emptying Pipeline Using Different Air Valves. Water, 9(2), 98. https://doi.org/10.3390/w9020098