
A Bi-Level Optimization Framework for Water Supply Network Repairs Considering Traffic Impact


Abstract
1. Introduction
2. Study Area and Data
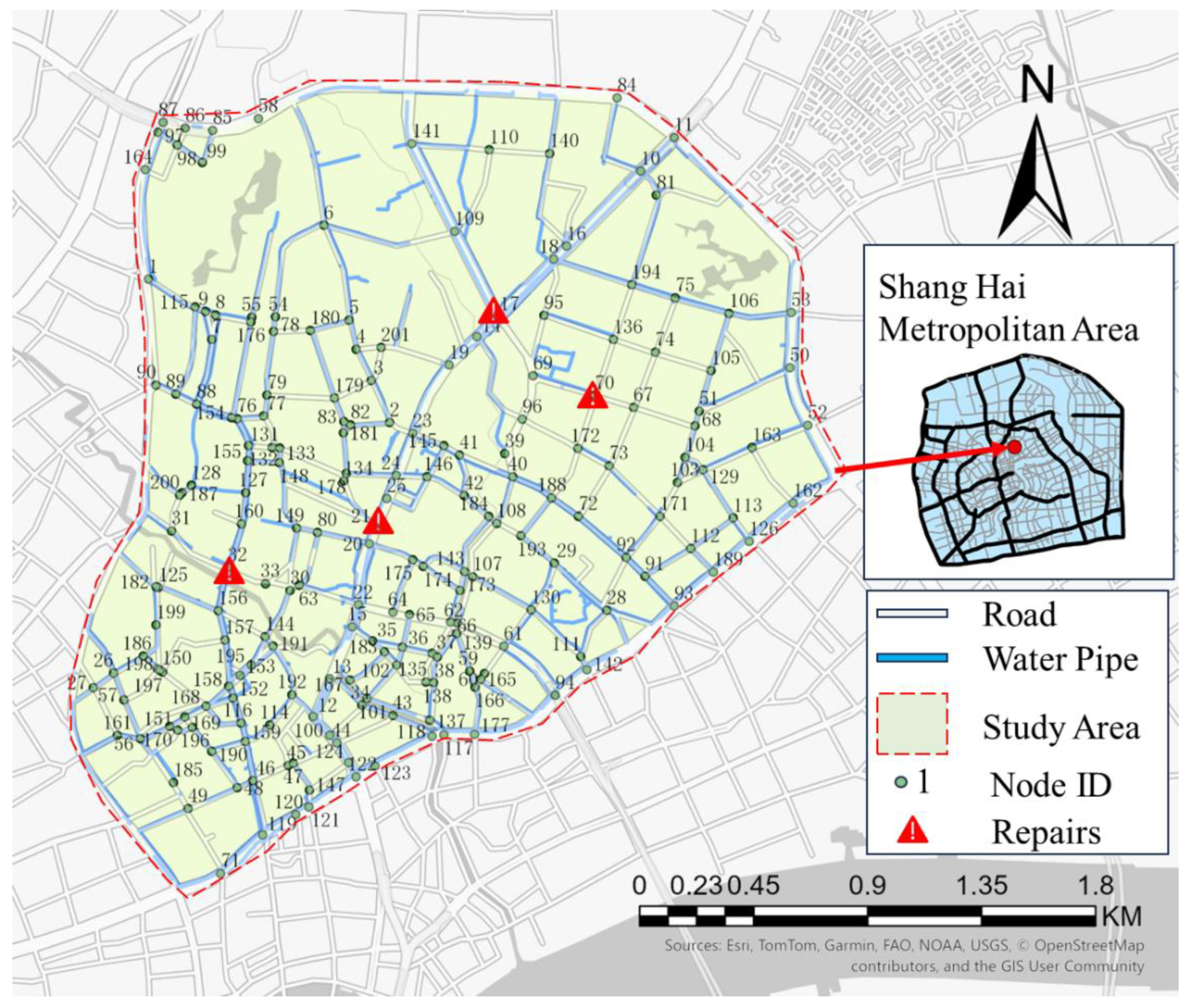
2.1. Study Area Description
2.2. Data Sources
3. Methodology
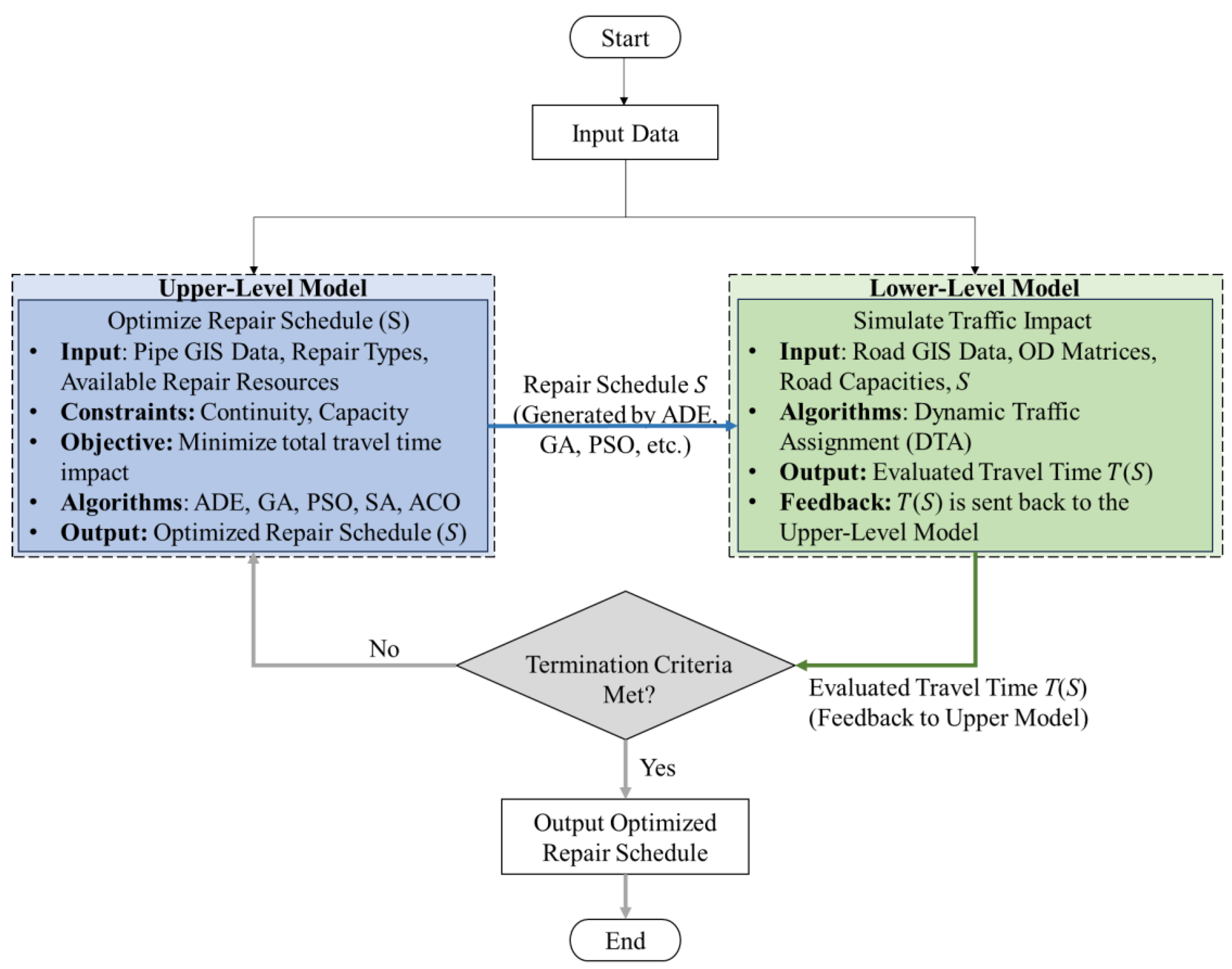
- Input Data: Pipe GIS data, repair types, crew availability, and traffic origin-destination (OD) matrices.
- Upper-Level Model: Employs optimization algorithms, such as adaptive differential evolution (ADE), genetic algorithm (GA), and particle swarm optimization (PSO) to minimize traffic disruptions by optimizing repair schedules.
- Lower-Level Model: Simulates the dynamic traffic response to road closures caused by repairs using the DTA approach.
- Feedback Loop: The repair schedule is iteratively updated based on traffic simulation results, ensuring a balance between repair efficiency and minimizing traffic disruptions.
- Termination Criteria Check: The optimization process continues until predefined termination criteria are met. These criteria include (1) convergence of the objective function, where improvements in total travel time impact become negligible over consecutive iterations; (2) reaching the maximum number of iterations or generations; (3) for the simulated annealing (SA) algorithm, the termination condition is met when the temperature falls below 0.001, following an exponential cooling schedule; and (4) for certain algorithms like ADE, ACO, and GA, an early stopping mechanism is applied, terminating the optimization if no improvement is observed over 10 consecutive iterations. These stopping conditions ensure computational efficiency while maintaining solution quality.
3.1. Upper-Level Model: Water Supply Network Repair Scheduling
3.1.1. Decision Variables
- S (Repair Schedule Set): The set of repair schedules, where each represents the start time and duration of repair task i. It is defined as
- xi,t (Repair Activation Indicator): A binary decision variable, where
- C (Repair Crew Capacity): The maximum number of repair crews available at any given time.
3.1.2. Objective Function
3.1.3. Constraints
- Repair Duration Constraint: Each repair task must be completed within a continuous time window.
- Crew Allocation Constraint: The total number of repair crews assigned at any given time should not exceed the available limit.
- Simultaneous Repairs Constraint: To ensure efficient use of resources and minimize disruptions, we impose a simultaneous repairs constraint, meaning no more than two repair tasks occur at the same time. This constraint accounts for local workforce limitations, the availability and spatial constraints of heavy machinery (e.g., excavators, welding equipment), and the need to control road occupancy and traffic disruptions.
3.1.4. Computation Process
- Step 1: Initialize the Repair Schedule
- Step 2: Evaluate Traffic Impact Using the Lower-Level Model
- Step 3: Optimization Algorithm Iteration
- The number of simultaneous repairs does not exceed the allowed limit;
- Repair continuity is maintained over time;
- Crew resource constraints are satisfied.
- Step 4: Update the Repair Schedule
- Step 5: Check Termination Criteria
- Convergence: The improvement in total travel time impact becomes negligible over consecutive iterations.
- Maximum iterations reached: The predefined maximum number of iterations is exhausted.
- Patience parameter: For certain algorithms, if no improvement is observed over a set number of iterations, the process is terminated early.
- Step 6: Output the Optimal Repair Plan
3.2. Lower-Level Model: Dynamic Traffic Assignment (DTA)
3.2.1. Key Variables
- Vr(t) (Traffic Volume on Road Segment r): The number of vehicles traveling on road segment r at time t, which dynamically changes based on road capacity constraints and repair activities.
- Qr(t) (Time-Dependent Traffic Demand on Road Segment r): The number of vehicles that intend to travel on road segment r at time t, derived from origin–destination (OD) data.
- Tr(t) (Travel Time on Road Segment r): The estimated travel time for vehicles on road r at time t, calculated using the BPR function (Equation (11)).
- (Remaining Road Capacity): The available capacity of road segment r at time t, affected by the repair schedule S. It is computed as
3.2.2. Constraints
- Traffic Flow Conservation: Ensures that the total incoming traffic at a road segment equals the total outgoing traffic, preserving flow continuity.
- Capacity Constraint: Restricts the traffic volume on each road segment to not exceed its available capacity at a given time, accounting for reduced capacity due to repairs.
- Travel Time Function: The travel time function follows the Bureau of Public Roads (BPR) function [24], which models how congestion impacts travel time based on traffic volume and road capacity.
3.2.3. Computation Process
- Step 1: Modify Road Network Conditions Based on Repair Schedule S
- Step 2: Perform Dynamic Traffic Assignment (DTA)
- Step 3: Compute System-Wide Travel Time T(S)
- Step 4: Provide Feedback to the Upper-Level Model
3.3. Repair Scheduling Strategy
3.3.1. Water Supply Network
- Repair Time
- Dynamic Crew Allocation
3.3.2. Transportation Network
- Road Capacity
- Traffic Demand
3.3.3. Time Points
4. Optimization Approach
4.1. Algorithmic Framework for Optimization
- (a)
- Population Initialization: A population of candidate solutions (repair schedules) is initialized, where each individual represents a possible solution for the water supply network repairs. Each individual is encoded as a vector S, where the elements of S correspond to repair locations and times.
- (b)
- Fitness Evaluation: For each individual, the fitness is evaluated based on the total travel time T(S), calculated using the DTA model. The objective is to minimize this travel time across the population.
- (c)
- Selection: Individuals are selected for the next generation based on their fitness. The selection mechanism varies between algorithms but generally favors individuals with lower travel times.
- (d)
- Termination: The optimization process continues until a stopping criterion is met, such as reaching the maximum number of generations or achieving convergence.
4.2. Adaptive Differential Evolution (ADE)
- Mutation and Crossover
- Adaptive Parameters
4.3. Genetic Algorithm (GA)
- Crossover and Mutation
- Selection
4.4. Particle Swarm Optimization (PSO)
- Velocity and Position Update
- Position Update
4.5. Simulated Annealing (SA)
- Temperature Schedule
- Cooling Schedule
4.6. Ant Colony Optimization (ACO)
- Pheromone Update and Solution Construction
- Pheromone Evaporation and Reinforcement
4.7. Algorithm Summary and Key Model Parameters
- Population Size/Swarm Size: For algorithms such as ADE, ACO, GA, and PSO, the population size was reduced to 30 individuals. These values were selected to strike a balance between diversity in the solution space and the speed of convergence, ensuring that the model could explore multiple solutions without excessive computational cost.
- Iterations/Generations: The maximum number of iterations or generations was set to 100 for all algorithms, with a patience parameter of 10. This setting allows the algorithms to stop early if no improvement is observed over 10 consecutive iterations, further reducing unnecessary computation.
- Cooling Schedule and Patience: For SA, an exponential cooling schedule was employed, starting with an initial temperature of 1000 and a cooling rate of 0.95. The patience parameter of “temperature < 0.001” ensures that the algorithm does not run for too long if no significant improvements are found.
5. Results and Discussion
5.1. Optimal Repair Schedule
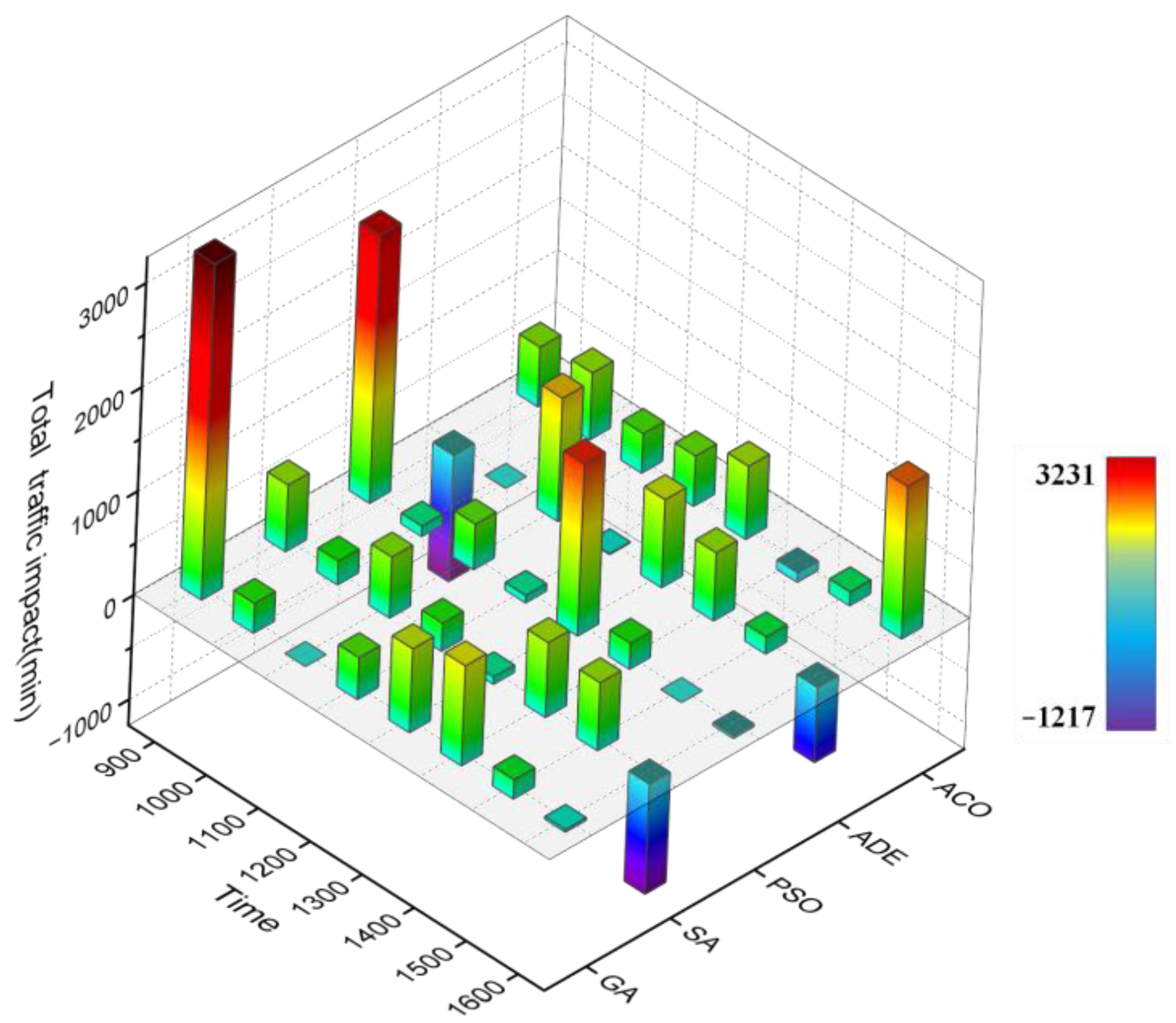
5.2. Traffic Impact Analysis
5.3. Computational Performance and Algorithm Selection
- ADE is the best choice when the primary goal is to minimize traffic impact, making it ideal for large-scale infrastructure repair planning;
- SA is optimal for real-time applications requiring fast decision-making due to its superior computational efficiency;
- ACO provides a balanced approach, performing well in scenarios where both computational efficiency and impact reduction are important;
- GA and PSO are less effective for large-scale urban repair scheduling, as they exhibit high traffic impact and prolonged computation times.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Buldyrev, S.V.; Parshani, R.; Paul, G.; Stanley, H.E.; Havlin, S. Catastrophic cascade of failures in interdependent networks. Nature 2010, 464, 1025–1028. [Google Scholar] [CrossRef] [PubMed]
- Gursan, C.; de Gooyert, V.; de Bruijne, M.; Rouwette, E. Socio-technical infrastructure interdependencies and their implications for urban sustainability; recent insights from the Netherlands. Cities 2023, 140, 10439. [Google Scholar] [CrossRef]
- Wang, N.; Jin, Z.-Y.; Zhao, J. Cascading failures of overload behaviors on interdependent networks. Phys. A Stat. Mech. Its Appl. 2021, 574, 125989. [Google Scholar] [CrossRef]
- Wert, J.L.; Shetye, K.S.; Li, H.; Yeo, J.H.; Xu, X.; Meitiv, A.; Xu, Y.; Overbye, T.J. Coupled Infrastructure Simulation of Electric Grid and Transportation Networks. In Proceedings of the 2021 IEEE Power & Energy Society Innovative Smart Grid Technologies Conference, Washington, DC, USA, 16–18 February 2021. [Google Scholar]
- Kuliczkowska, E. The interaction between road traffic safety and the condition of sewers laid under roads. Transp. Res. Part D-Transp. Environ. 2016, 48, 203–213. [Google Scholar] [CrossRef]
- Rinaldi, S.M.; Peerenboom, J.; Kelly, T.K. Identifying, understanding, and analyzing critical infrastructure interdependencies. Control Syst. IEEE 2002, 21, 11–25. [Google Scholar] [CrossRef]
- Imani, M.; Hajializadeh, D. A resilience assessment framework for critical infrastructure networks’ interdependencies. Water Sci. Technol. 2019, 81, 1420–1431. [Google Scholar] [CrossRef]
- Ozdemir, Z.; Coulier, P.; Lak, M.A.; Francois, S.; Lombaert, G.; Degrande, G. Numerical evaluation of the dynamic response of pipelines to vibrations induced by the operation of a pavement breaker. Soil Dyn. Earthq. Eng. 2013, 44, 153–167. [Google Scholar] [CrossRef]
- Wang, W.; Robert, D.J.; Zhou, A.; Li, C.Q.; Wasim, M. Full Scale Corrosion Test on Buried Cast Iron Pipes. In Proceedings of the Fourth International Conference on Sustainable Construction Materials and Technologies, Las Vegas, NV, USA, 7–11 August 2016. [Google Scholar]
- Jayasinghe, P.A.; Derrible, S.; Kattan, L. Interdependencies between Urban Transport, Water, and Solid Waste Infrastructure Systems. Infrastructures 2023, 8, 76. [Google Scholar] [CrossRef]
- Uddin, S. Interdependency Between Water and Road Infrastructures: Cases and Impacts. Ph.D. Thesis, University of South Florida, Tampa, FL, USA, 2023. [Google Scholar]
- El-Zahab, S.; Zayed, T. Leak detection in water distribution networks: An introductory overview. Smart Water 2019, 4, 5. [Google Scholar] [CrossRef]
- Underground Pipeline Committee of CACP. Statistical Analysis Report of Underground Pipeline Accidents in China in 2021; “Pipeline Accident” WeChat Official Account, 22 January 2022. Available online: https://mp.weixin.qq.com/s/yWbAwD1aTfPTG_Whre0Ajg (accessed on 11 March 2025).
- Mottahedin, A.; Giudicianni, C.; Cunha, M.C.; Creaco, E. Multiobjective Approach for Water Distribution Network Design Combining Pipe Sizing and Isolation Valve Placement. J. Water Resour. Plan. Manag. 2024, 150, 04024043. [Google Scholar] [CrossRef]
- Ramani, K.; Rudraswamy, G.K.; Umamahesh, N.V. Optimal Design of Intermittent Water Distribution Network Considering Network Resilience and Equity in Water Supply. Water 2023, 15, 3265. [Google Scholar] [CrossRef]
- Chu, J.; Wang, H.; Shao, Y.; Yu, T. Analysis on theory and technical framework of optimal maintenance of water supply network. Water Resour. Prot. 2022, 38, 67–72. [Google Scholar]
- Atat, R.; Ismail, M.; Serpedin, E. Cascading Failures Mitigation Strategy for Resilient Water Infrastructures*. IFAC-Pap. 2023, 56, 4645–4650. [Google Scholar] [CrossRef]
- Prasad, T.D.; Park, N.-S. Multiobjective Genetic Algorithms for Design of Water Distribution Networks. J. Water Resour. Plan. Manag. 2004, 130, 73–82. [Google Scholar] [CrossRef]
- Farmani, R.; Kakoudakis, K.; Behzadian, K.; Butler, D. Pipe Failure Prediction in Water Distribution Systems Considering Static and Dynamic Factors. Procedia Eng. 2017, 186, 117–126. [Google Scholar] [CrossRef]
- Marshall, N.L. Forecasting the impossible: The status quo of estimating traffic flows with static traffic assignment and the future of dynamic traffic assignment. Res. Transp. Bus. Manag. 2018, 29, 85–92. [Google Scholar] [CrossRef]
- Kachroo, P.; Özbay, K.M.A. Traffic Assignment: A Survey of Mathematical Models and Techniques. In Feedback Control Theory for Dynamic Traffic Assignment; Kachroo, P., Özbay, K.M.A., Eds.; Springer International Publishing: Cham, Switzerland, 2018; pp. 25–53. [Google Scholar]
- Hu, Q.; Che, D.; Wang, F.; He, L. Analyzing the effects of extreme cold waves on urban water supply network safety: A case study from 2020 to 2021. Urban Clim. 2024, 58, 102146. [Google Scholar] [CrossRef]
- Zhou, X.; Taylor, J. DTALite: A queue-based mesoscopic traffic simulator for fast model evaluation and calibration. Cogent Eng. 2014, 1, 961345. [Google Scholar] [CrossRef]
- US Bureau of Public Roads Office of Planning. Traffic Assignment Manual for Application with a Large, High Speed Computer; US Department of Commerce: Washington, DC, USA, 1964.
- Agency, F.E.M. Hazus Earthquake Model Technical Manual; FEMA: Hyattsville, MD, USA, 2022. [Google Scholar]
- Zhang, J.; Sanderson, A.C. Adaptive Differential Evolution; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Holland, J.H. Genetic algorithms. Sci. Am. 1992, 267, 66–73. [Google Scholar] [CrossRef]
- Kennedy, J.; Eberhart, R. Particle swarm optimization. In Proceedings of the ICNN’95 International Conference on Neural Networks, Perth, Australia, 27 November–1 December 1995; Volume 1944, pp. 1942–1948. [Google Scholar]
- Bertsimas, D.; Tsitsiklis, J. Simulated annealing. Stat. Sci. 1993, 8, 10–15. [Google Scholar] [CrossRef]
- Dorigo, M.; Maniezzo, V.; Colorni, A. Ant sytem: Optimization by a colony of cooperating agents. IEEE Trans. Syst. Man Cybern.-Part B Cybern. 1996, 26, 29–41. [Google Scholar] [CrossRef] [PubMed]
- Adrian, A.M.; Utamima, A.; Wang, K.-J. A comparative study of GA, PSO and ACO for solving construction site layout optimization. KSCE J. Civ. Eng. 2015, 19, 520–527. [Google Scholar] [CrossRef]
- Papazoglou, G.; Biskas, P. Review and Comparison of Genetic Algorithm and Particle Swarm Optimization in the Optimal Power Flow Problem. Energies 2023, 16, 1152. [Google Scholar] [CrossRef]
- Misra, B.; Chakraborty, S. Ant Colony Optimization—Recent Variants, Application and Perspectives. In Applications of Ant Colony Optimization and Its Variants: Case Studies and New Developments; Dey, N., Ed.; Springer Nature: Singapore, 2024; pp. 1–17. [Google Scholar]
- Musa, R.; Chen, F.F. Simulated annealing and ant colony optimization algorithms for the dynamic throughput maximization problem. Int. J. Adv. Manuf. Technol. 2008, 37, 837–850. [Google Scholar] [CrossRef]
- Braess, D.; Nagurney, A.; Wakolbinger, T. On a paradox of traffic planning. Transp. Sci. 2005, 39, 446–450. [Google Scholar] [CrossRef]
- Lin, J.; Hu, Q.; Jiang, Y. Braess Paradox in Optimal Multiperiod Resource-Constrained Restoration Scheduling Problem. Int. J. Civ. Eng. 2024, 22, 1321–1338. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
| Node ID | Road Class | Pipe Type | Failure Type |
|---|---|---|---|
| 17 | Primary and Primary | DN 500, iron | Leak |
| 21 | Primary and Primary | DN 1200, iron | Leak |
| 32 | Primary and Primary | DN 300, cast iron | Leak |
| 70 | Secondary and Secondary | DN 300, cast iron | Leak |
| Type | Data Source | Description | Usage in Simulation |
|---|---|---|---|
| Water Supply Network | Pipe GIS data | Includes spatial and attribute information of pipes, such as diameters, materials, etc. | Used to calculate repair times, influencing the duration and crew allocation based on the Hazus Earthquake Model Technical Manual |
| Repair Types | Types of repairs, such as leaks and burst pipes | Determines the repair time calculation based on the type of repair (leak or burst) | |
| Repair Crew Data | Information on available crew size | Used to dynamically allocate crew resources based on the impact of repairs on the transportation network | |
| Repair Time Formula | Hazus Earthquake Model Technical Manual | Provides the formula to calculate the repair duration based on pipe diameter and repair type | |
| Transportation Network | Road GIS Data | Contains spatial and attribute information of road segments, including road hierarchy and width | Used to model network topology and road capacity |
| Road Capacity Data | Capacity of roads in the transportation network | Road capacities are adjusted dynamically based on the proximity and severity of the repair activities | |
| Traffic Demand Data | OD (Origin–Destination) matrices | Reflects traffic demand and volume for different times of day, influencing dynamic traffic assignment |
| Class | Diameter from: [mm] | Diameter to: [mm] | # (Number of) Fixed Breaks/Day/Worker | # Fixed Leaks/Day/Worker | # Available Workers for Leaks and Breaks | Priority |
|---|---|---|---|---|---|---|
| a | 1500 | 7600 | 0.2 | 0.4 | 100 | 1 (Highest) |
| b | 900 | 1500 | 0.2 | 0.4 | 100 | 2 |
| c | 500 | 900 | 0.2 | 0.4 | 100 | 3 |
| d | 300 | 500 | 0.5 | 1 | 100 | 4 |
| e | 200 | 300 | 0.5 | 1 | 100 | 5 |
| u | <200, or Unknown Diameter | 0.5 | 1 | 100 | 6 (Lowest) | |
| Algorithm | Mutation Strategy | Crossover Strategy | Adaptive Parameters | Search Space |
|---|---|---|---|---|
| ADE | Differential mutation | Differential | Yes (F, CR) | Continuous |
| GA | Bit-flip mutation | Single-point | No | Discrete |
| PSO | Velocity update | None | No | Continuous |
| SA | Random perturbation | None | Yes (temperature) | Continuous |
| ACO | None | None | Pheromone evaporation, α, β, ρ | Discrete |
| Algorithm | Population Size/Swarm Size | Crossover Rate | Mutation Rate/ Factor | Inertia Weight (w) | Cognitive (c1) | Social (c2) | Cooling Schedule | Iterations/Generations | Other Parameters |
|---|---|---|---|---|---|---|---|---|---|
| ADE | 30 | 0.8 (adaptive) | 0.9 (adaptive) | N/A | N/A | N/A | N/A | 100 (patience = 10) | Adaptive mutation and crossover rates |
| ACO | 30 | N/A | N/A | N/A | N/A | N/A | N/A | 100 (patience = 10) | Pheromone decay rate = 0.1, a = 1, ß = 2 |
| SA | N/A | N/A | N/A | N/A | N/A | N/A | Exponential decay | 30 (temperature < 0.001) | Initial temperature = 1000, cooling rate = 0.95 |
| GA | 30 | 0.7 | 0.1 | N/A | N/A | N/A | N/A | 100 (patience = 10) | Single-point crossover, bit-flip mutation |
| PSO | 30 | N/A | N/A | 0.729 | 1.494 | 1.494 | N/A | 100 (patience = 10) | Velocity update based on personal and global best |
| Time | Repair Node | ||||
|---|---|---|---|---|---|
| GA | SA | PSO | ADE | ACO | |
| 9:00 | 21 | — | 32 | 70 | — |
| 10:00 | — | — | 70 | — | — |
| 11:00 | — | — | — | 21 | — |
| 12:00 | 17.70 | 70 | — | — | 17.21 |
| 13:00 | — | — | 17 | — | |
| 14:00 | 32 | 32 | 21 | 32 | — |
| 15:00 | — | 17 | — | — | 70 |
| 16:00 | — | 21 | — | 17 | 32 |
| Algorithm | Total Traffic Impact (h) | Computational Time (h) | Notes |
|---|---|---|---|
| ADE | 15.53 | 2.48 | Best at minimizing traffic impact |
| ACO | 71.72 | 1.59 | Fast but less effective in reducing impact |
| SA | 35.40 | 0.58 | Fastest, but moderate impact |
| GA | 98.47 | 4.23 | Highest impact, longest runtime |
| PSO | 84.57 | 1.88 | Middle-ground performance |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, Q.; Zhang, Y. A Bi-Level Optimization Framework for Water Supply Network Repairs Considering Traffic Impact. Water 2025, 17, 832. https://doi.org/10.3390/w17060832
Hu Q, Zhang Y. A Bi-Level Optimization Framework for Water Supply Network Repairs Considering Traffic Impact. Water. 2025; 17(6):832. https://doi.org/10.3390/w17060832
Chicago/Turabian StyleHu, Qunfang, and Yu Zhang. 2025. "A Bi-Level Optimization Framework for Water Supply Network Repairs Considering Traffic Impact" Water 17, no. 6: 832. https://doi.org/10.3390/w17060832
APA StyleHu, Q., & Zhang, Y. (2025). A Bi-Level Optimization Framework for Water Supply Network Repairs Considering Traffic Impact. Water, 17(6), 832. https://doi.org/10.3390/w17060832