
A Comparative Assessment of Reynolds Averaged Navier–Stokes and Large-Eddy Simulation Models: Choosing the Best for Pool-Type Fishway Flow Simulations




Abstract
1. Introduction
2. Materials and Methods
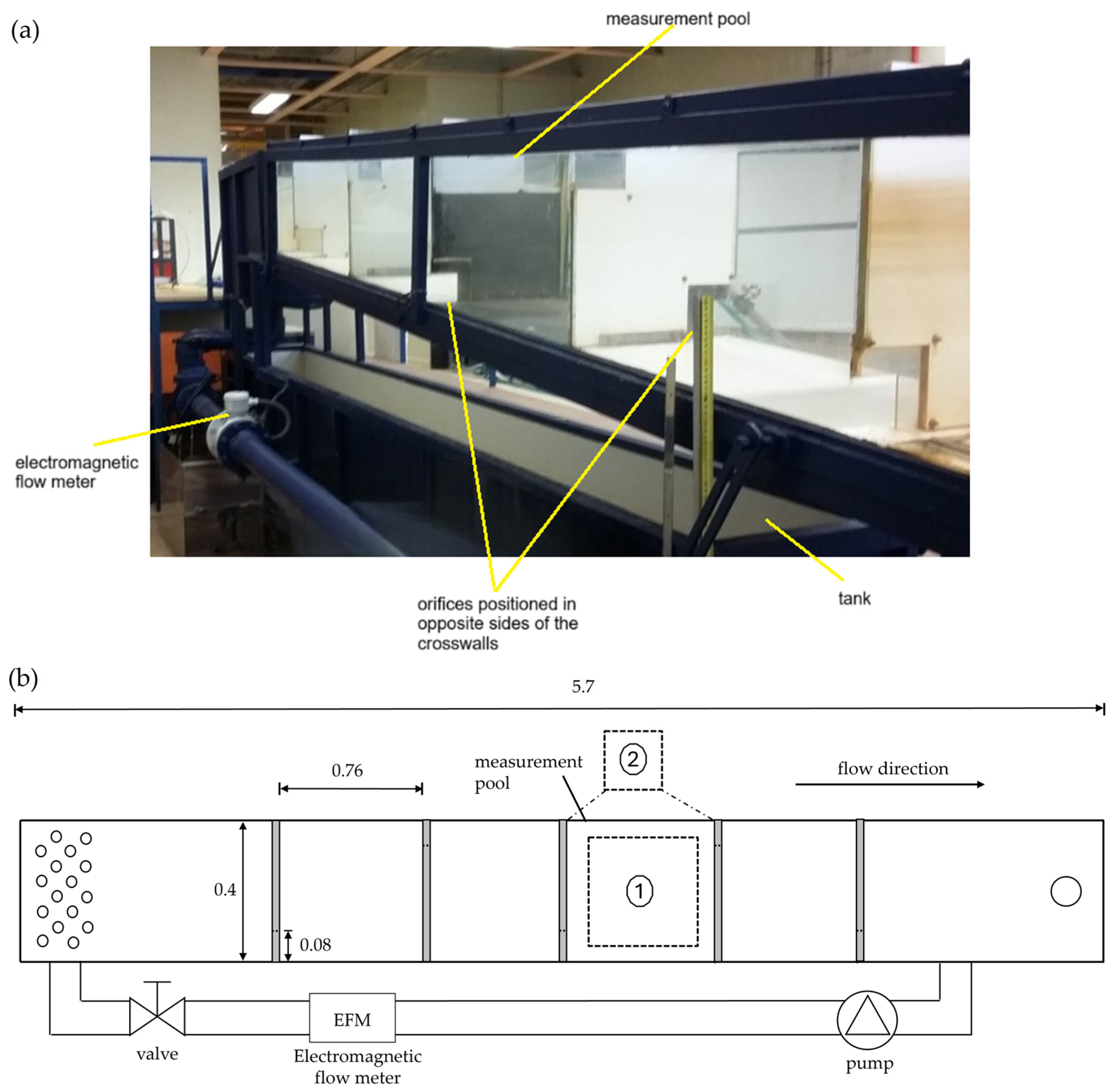
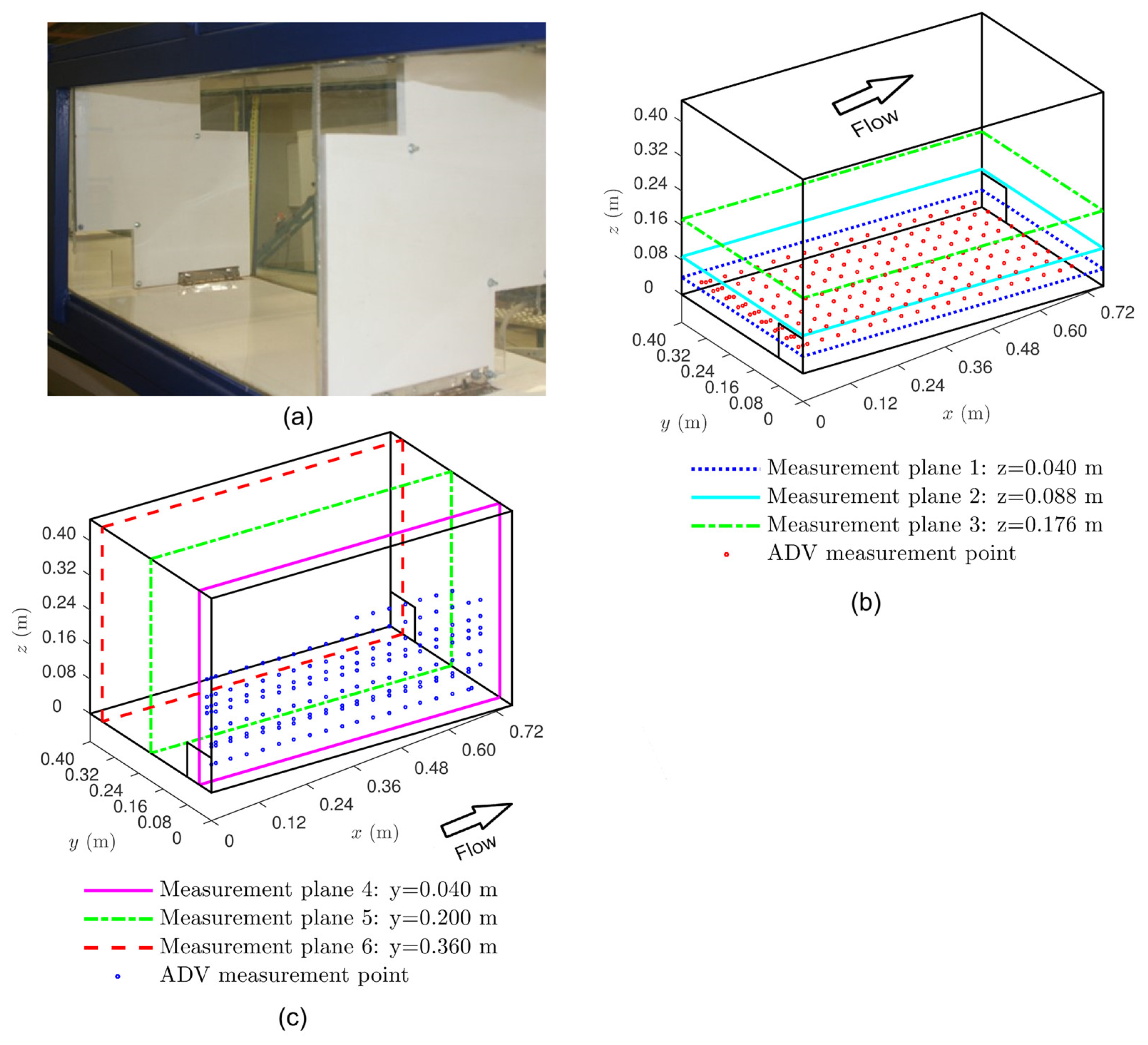
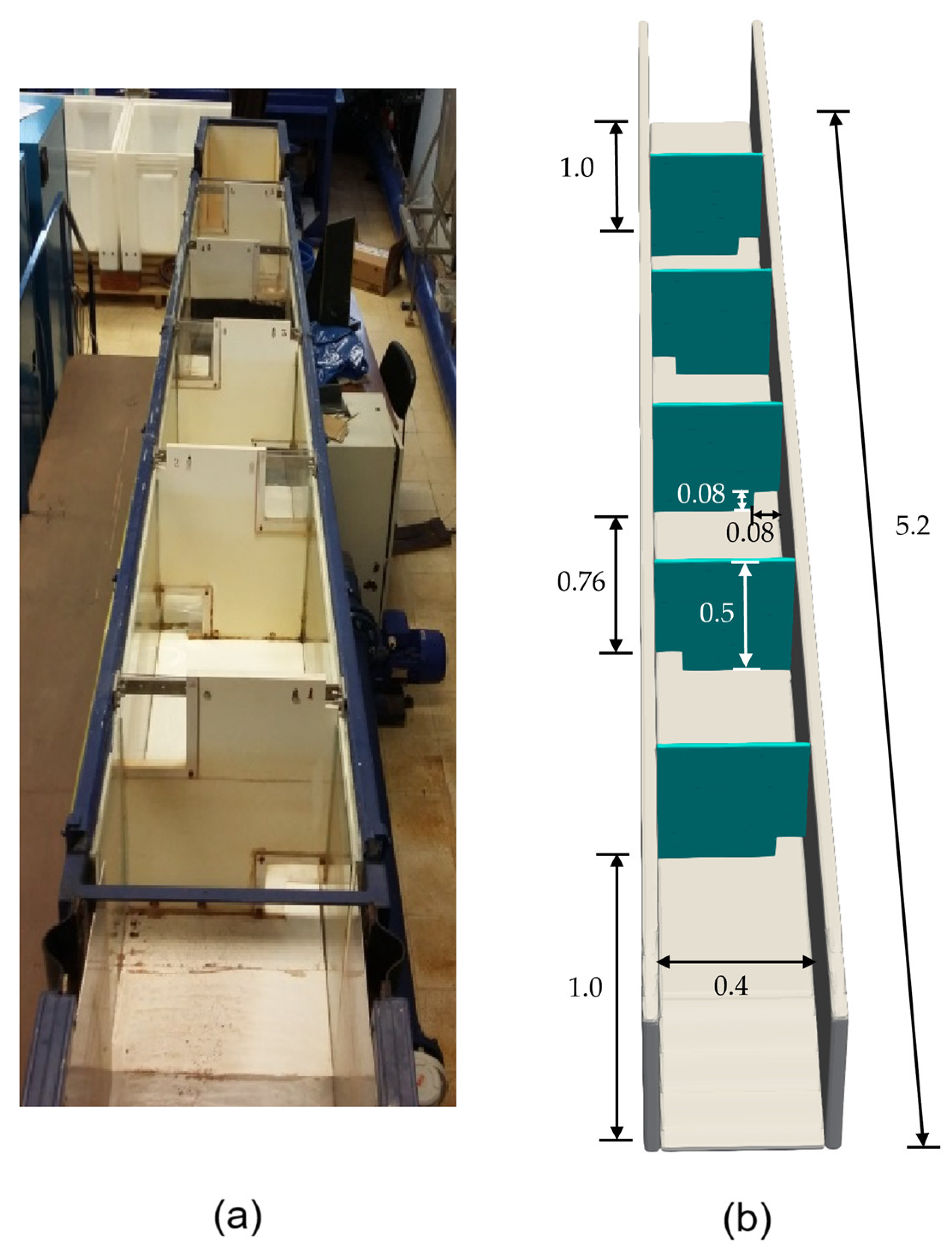
2.1. Experimental Procedure
2.2. CFD Model
2.2.1. Model Geometry, Computational Domain, Grid, and Boundary Conditions
2.2.2. Numerical Solver Options
3. Results
3.1. Discharges and Flow Depths
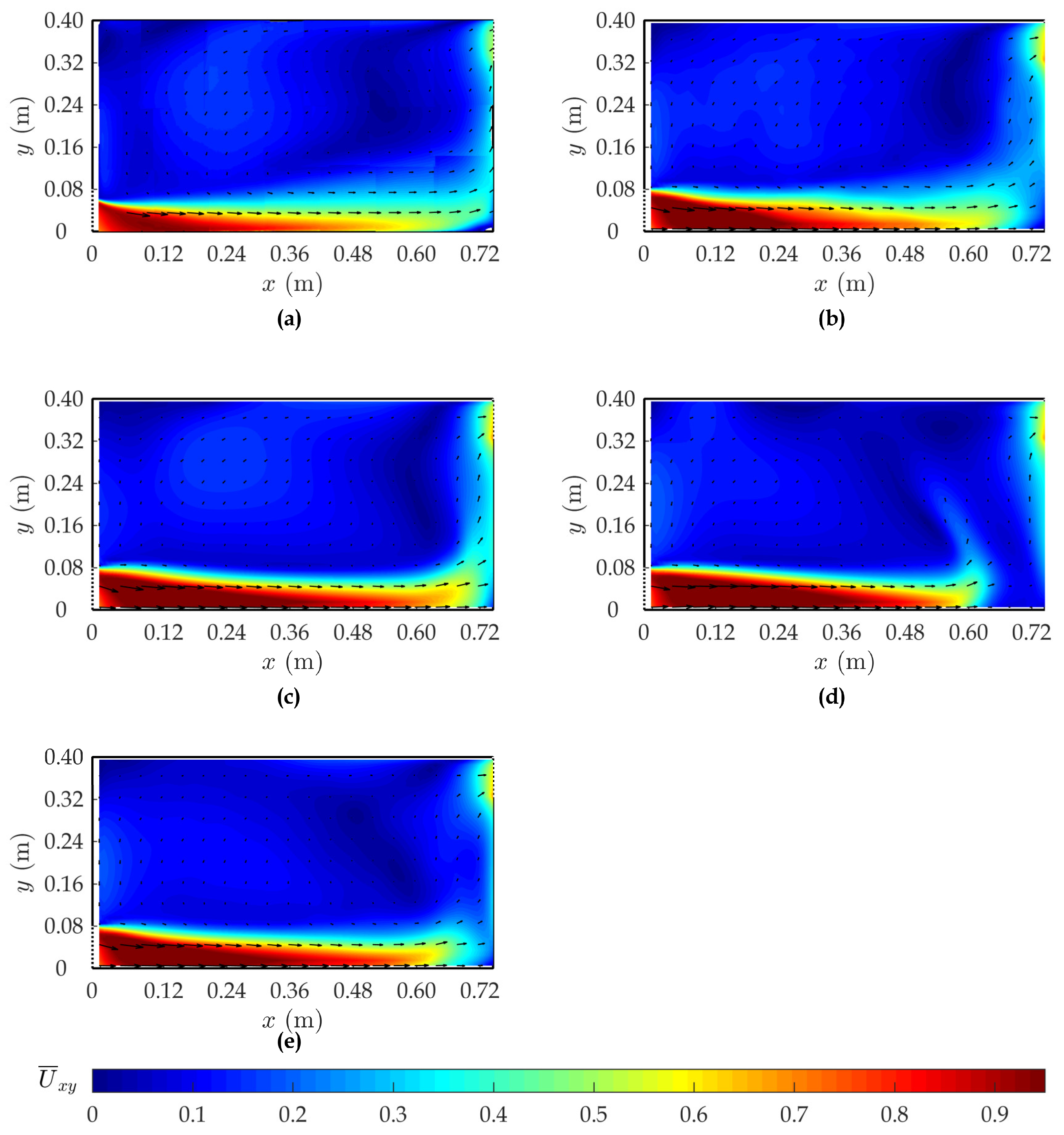
3.2. Flow Patterns
3.3. Velocities
3.4. Turbulent Kinetic Energy
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bravo-Córdoba, F.J.; García-Vega, A.; Fuentes-Pérez, J.F.; Fernandes-Celestino, L.; Makrakis, S.; Sanz-Ronda, F.J. Bidirectional Connectivity in Fishways: A Mitigation for Impacts on Fish Migration of Small Hydropower Facilities. Aquat. Conserv. Mar. Freshw. Ecosyst. 2023, 33, 549–565. [Google Scholar] [CrossRef]
- Costa, M.J.; Duarte, G.; Segurado, P.; Branco, P. Major Threats to European Freshwater Fish Species. Sci. Total Environ. 2021, 797, 149105. [Google Scholar] [CrossRef]
- Katopodis, C.; Williams, J.G. The Development of Fish Passage Research in a Historical Context. Ecol. Eng. 2012, 48, 8–18. [Google Scholar] [CrossRef]
- Santos, J.M.; Silva, A.; Katopodis, C.; Pinheiro, P.; Pinheiro, A.; Bochechas, J.; Ferreira, M.T. Ecohydraulics of Pool-Type Fishways: Getting Past the Barriers. Ecol. Eng. 2012, 48, 38–50. [Google Scholar] [CrossRef]
- Silva, A.T.; Santos, J.M.; Ferreira, M.T.; Pinheiro, A.N.; Katopodis, C. Effects of Water Velocity and Turbulence on the Behaviour of Iberian Barbel (Luciobarbus Bocagei, Steindachner 1864) in an Experimental Pool-type Fishway. River Res. Appl. 2011, 27, 360–373. [Google Scholar] [CrossRef]
- Silva, A.T.; Katopodis, C.; Santos, J.M.; Ferreira, M.T.; Pinheiro, A.N. Cyprinid Swimming Behaviour in Response to Turbulent Flow. Ecol. Eng. 2012, 44, 314–328. [Google Scholar] [CrossRef]
- Tan, J.; Tao, L.; Gao, Z.; Dai, H.; Shi, X. Modeling Fish Movement Trajectories in Relation to Hydraulic Response Relationships in an Experimental Fishway. Water 2018, 10, 1511. [Google Scholar] [CrossRef]
- Tan, J.; Gao, Z.; Dai, H.; Yang, Z.; Shi, X. Effects of Turbulence and Velocity on the Movement Behaviour of Bighead Carp (Hypophthalmichthys Nobilis) in an Experimental Vertical Slot Fishway. Ecol. Eng. 2019, 127, 363–374. [Google Scholar] [CrossRef]
- Deutscher Verband für Wasserwirtschaft und Kulturbau (DVWK) (Ed.) Fish Passes: Design, Dimensions and Monitoring; FAO (Food and Agriculture Organization of the United Nations): Rome, Italy, 2002; ISBN 978-92-5-104894-8. [Google Scholar]
- Rodi, W. Turbulence Modeling and Simulation in Hydraulics: A Historical Review. J. Hydraul. Eng. 2017, 143, 03117001. [Google Scholar] [CrossRef]
- Bombardelli, F.A.; Meireles, I.; Matos, J. Laboratory Measurements and Multi-Block Numerical Simulations of the Mean Flow and Turbulence in the Non-Aerated Skimming Flow Region of Steep Stepped Spillways. Environ. Fluid Mech. 2011, 11, 263–288. [Google Scholar] [CrossRef]
- Shahabi, M.; Ahadiyan, J.; Ghomeshi, M.; Narimousa, M.; Katopodis, C.; Azizi Nadian, H. Numerical Study of the Effect of a V-shaped Weir on Turbulence Characteristics and Velocity in V-weir Fishways. River Res. Appl. 2023, 39, 21–34. [Google Scholar] [CrossRef]
- Chang, X.; Zhang, L.; He, X. Numerical Study of the Thunniform Mode of Fish Swimming with Different Reynolds Number and Caudal Fin Shape. Comput. Fluids 2012, 68, 54–70. [Google Scholar] [CrossRef]
- Chin, C.; Ng, H.C.H.; Blackburn, H.M.; Monty, J.P.; Ooi, A. Turbulent Pipe Flow at Reτ ≈ 1000: A Comparison of Wall-Resolved Large-Eddy Simulation, Direct Numerical Simulation and Hot-Wire Experiment. Comput. Fluids 2015, 122, 26–33. [Google Scholar] [CrossRef]
- Constantinescu, G.; Miyawaki, S.; Rhoads, B.; Sukhodolov, A.; Kirkil, G. Structure of Turbulent Flow at a River Confluence with Momentum and Velocity Ratios Close to 1: Insight Provided by an Eddy-resolving Numerical Simulation. Water Resour. Res. 2011, 47, 2010WR010018. [Google Scholar] [CrossRef]
- Stoesser, T.; Ruether, N.; Olsen, N.R.B. Calculation of Primary and Secondary Flow and Boundary Shear Stresses in a Meandering Channel. Adv. Water Resour. 2010, 33, 158–170. [Google Scholar] [CrossRef]
- Tian, F.-B.; Wang, W.; Wu, J.; Sui, Y. Swimming Performance and Vorticity Structures of a Mother–Calf Pair of Fish. Comput. Fluids 2016, 124, 1–11. [Google Scholar] [CrossRef]
- Zöschg, H.; Dobler, W.; Aufleger, M.; Zeiringer, B. Evaluation of Hydraulics and Downstream Fish Migration at Run-of-River Hydropower Plants with Horizontal Bar Rack Bypass Systems by Using CFD. Water 2023, 15, 1042. [Google Scholar] [CrossRef]
- Kaminski, L.; Thorenz, C.; Weichert, R.; Lehmann, B. Computational Fluid Dynamics Simulation of Passive Downstream Fish Passage over a Weir with OpenFOAM®. J. Ecohydraulics 2025, 10, 19–42. [Google Scholar] [CrossRef]
- Baharvand, S.; Lashkar-Ara, B. Hydraulic Design Criteria of the Modified Meander C-Type Fishway Using the Combined Experimental and CFD Models. Ecol. Eng. 2021, 164, 106207. [Google Scholar] [CrossRef]
- Heimerl, S.; Hagmeyer, M.; Echteler, C. Numerical Flow Simulation of Pool-Type Fishways: New Ways with Well-Known Tools. Hydrobiologia 2008, 609, 189–196. [Google Scholar] [CrossRef]
- Romão, F.; Quaresma, A.L.; Simão, J.; Bravo-Córdoba, F.J.; Viseu, T.; Santos, J.M.; Sanz-Ronda, F.J.; Pinheiro, A.N. Debating the Rules: An Experimental Approach to Assess Cyprinid Passage Performance Thresholds in Vertical Slot Fishways. Water 2024, 16, 439. [Google Scholar] [CrossRef]
- Tarrade, L.; Texier, A.; David, L.; Larinier, M. Topologies and Measurements of Turbulent Flow in Vertical Slot Fishways. Hydrobiologia 2008, 609, 177–188. [Google Scholar] [CrossRef]
- Wu, S.; Rajaratnam, N.; Katopodis, C. Structure of Flow in Vertical Slot Fishway. J. Hydraul. Eng. 1999, 125, 351–360. [Google Scholar] [CrossRef]
- Syms, J.C.; Kirk, M.A.; Caudill, C.C.; Tonina, D. A Biologically Based Measure of Turbulence Intensity for Predicting Fish Passage Behaviours. J. Ecohydraulics 2024, 9, 55–67. [Google Scholar] [CrossRef]
- Tarena, F.; Nyqvist, D.; Katopodis, C.; Comoglio, C. Computational Fluid Dynamics in Fishway Research—A Systematic Review on Upstream Fish Passage Solutions. J. Ecohydraulics 2024, 10, 107–126. [Google Scholar] [CrossRef]
- Chen, C.; Jaw, S. Fundamentals of Turbulence Modeling; Taylor & Francis: Washington, DC, USA, 1998. [Google Scholar]
- El-Behery, S.M.; Hamed, M.H. A Comparative Study of Turbulence Models Performance for Separating Flow in a Planar Asymmetric Diffuser. Comput. Fluids 2011, 44, 248–257. [Google Scholar] [CrossRef]
- Wilcox, D.C. Turbulence-Modeling-for-CFD; DCW Industries: La Canãda, CA, USA, 1994. [Google Scholar]
- An, R.; Li, J.; Liang, R.; Tuo, Y. Three-Dimensional Simulation and Experimental Study for Optimising a Vertical Slot Fishway. J. Hydro-Environ. Res. 2016, 12, 119–129. [Google Scholar] [CrossRef]
- Aminalipour, M.; Mehraein, M.; Esmaeili, M.; Mohajeri, S.H. Improvement of the Hydraulic Performance of Vertical Slot Fishway Type VI Using Unsubmerged Plates. Iran. J. Sci. Technol. Trans. Civ. Eng. 2024. [Google Scholar] [CrossRef]
- Sharif, M.A.R.; Wong, Y.K.E. Evaluation of the Performance of Three Turbulence Closure Models in the Prediction of Confined Swirling Flows. Comput. Fluids 1995, 24, 81–100. [Google Scholar] [CrossRef]
- Yakhot, V.; Orszag, S.A. Renormalization Group Analysis of Turbulence. I. Basic Theory. J. Sci. Comput. 1986, 1, 3–51. [Google Scholar] [CrossRef]
- Yakhot, V.; Smith, L.M. The Renormalization Group, the?-Expansion and Derivation of Turbulence Models. J. Sci. Comput. 1992, 7, 35–61. [Google Scholar] [CrossRef]
- Flow Science, Inc. Flow Science FLOW-3D Version 11.2 User Manual; Flow Science, Inc.: Santa Fe, NM, USA, 2016. [Google Scholar]
- Tong, G.; Zhang, G.; Christopher, D.M.; Bjerg, B.; Ye, Z.; Cheng, J. Evaluation of Turbulence Models to Predict Airflow and Ammonia Concentrations in a Scale Model Swine Building Enclosure. Comput. Fluids 2013, 71, 240–249. [Google Scholar] [CrossRef]
- Bouffanais, R. Advances and Challenges of Applied Large-Eddy Simulation. Comput. Fluids 2010, 39, 735–738. [Google Scholar] [CrossRef]
- Zhiyin, Y. Large-Eddy Simulation: Past, Present and the Future. Chin. J. Aeronaut. 2015, 28, 11–24. [Google Scholar] [CrossRef]
- Pope, S.B. Ten Questions Concerning the Large-Eddy Simulation of Turbulent Flows. New J. Phys. 2004, 6, 35. [Google Scholar] [CrossRef]
- Computational Fluid Dynamics: Applications in Environmental Hydraulics, 1st ed.; Bates, P.D., Lane, S.N., Ferguson, R.I., Eds.; John Wiley& Sons, Ltd.: Chichester, UK, 2005; ISBN 978-0-470-84359-8. [Google Scholar]
- Benchikh Le Hocine, A.E.; Lacey, R.W.J.; Poncet, S. Turbulent Flow over a D-Section Bluff Body: A Numerical Benchmark. Environ. Fluid Mech. 2019, 19, 435–456. [Google Scholar] [CrossRef]
- Duguay, J.M.; Lacey, R.W.J.; Gaucher, J. A Case Study of a Pool and Weir Fishway Modeled with OpenFOAM and FLOW-3D. Ecol. Eng. 2017, 103, 31–42. [Google Scholar] [CrossRef]
- Fuentes-Pérez, J.F.; Silva, A.T.; Tuhtan, J.A.; García-Vega, A.; Carbonell-Baeza, R.; Musall, M.; Kruusmaa, M. 3D Modelling of Non-Uniform and Turbulent Flow in Vertical Slot Fishways. Environ. Model. Softw. 2018, 99, 156–169. [Google Scholar] [CrossRef]
- Abeyratne, W.M.L.K.; Weerasinghe, P.S.; Weerakoon, S.B. Modeling of Flow in a Weir and Pool Fishway with Orifices for Optimizing the Fishway Design. In Proceedings of 16th Asian Congress of Fluid Mechanics, Bangalore, India, 13–17 December 2019; Venkatakrishnan, L., Majumdar, S., Subramanian, G., Bhat, G.S., Dasgupta, R., Arakeri, J., Eds.; Lecture Notes in Mechanical Engineering; Springer Singapore: Singapore, 2021; pp. 527–534. ISBN 9789811551826. [Google Scholar]
- Li, S.; Yang, J.; Ma, X.; Li, X. Flow Features in a Pooled Fishway with V-Shaped Weir Formation. Eng. Appl. Comput. Fluid Mech. 2020, 14, 1337–1350. [Google Scholar] [CrossRef]
- Li, S.; Yang, J.; Ansell, A. Evaluation of Pool-Type Fish Passage with Labyrinth Weirs. Sustainability 2022, 14, 1098. [Google Scholar] [CrossRef]
- Bravo-Córdoba, F.J.; Fuentes-Pérez, J.F.; García-Vega, A.; Peñas, F.J.; Barquín, J.; Sanz-Ronda, F.J. Brown Trout Upstream Passage Performance for a Fishway with Water Drops between Pools beyond Fish Passage Design Recommendations. Water 2022, 14, 2750. [Google Scholar] [CrossRef]
- Ye, Z.; Lian, X.; Bai, F.; Hao, D.; Li, D.; Fang, Z. Response of Upstream Behavior and Hydrodynamic Factors of Anguilla Japonica in a Combined Bulkhead Fishway Under Tidal Conditions. Water 2023, 15, 2585. [Google Scholar] [CrossRef]
- Abad, J.; Waratuke, A.; Barnas, C.; Garcia, M. Hydraulic Model Study of Canoe Chute and Fish Passage for the Chicago River North Branch Dam. In Proceedings of the World Environmental and Water Resources Congress, Great Rivers, Kansas City, MI, USA, 17–21 May 2009. [Google Scholar]
- Wang, X.; Wang, F.; Yang, J.; Yu, P. Modelling the Hydraulic Characteristics of Diaphragm Fishways and the Effects on Fish Habitats. Front. Environ. Sci. 2022, 10, 977295. [Google Scholar] [CrossRef]
- Quaresma, A.; Pinheiro, A. Modelling of Pool-Type Fishways Flows: Efficiency and Scale Effects Assessment. Water 2021, 13, 851. [Google Scholar] [CrossRef]
- Cea, L.; Pena, L.; Puertas, J.; Vázquez-Cendón, M.E.; Peña, E. Application of Several Depth-Averaged Turbulence Models to Simulate Flow in Vertical Slot Fishways. J. Hydraul. Eng. 2007, 133, 160–172. [Google Scholar] [CrossRef]
- Quaranta, E.; Katopodis, C.; Comoglio, C. Effects of Bed Slope on the Flow Field of Vertical Slot Fishways. River Res. Appl. 2019, 35, 656–668. [Google Scholar] [CrossRef]
- Rossi, J.B.; Sanagiotto, D.G. Pool-Type Fishway with Orifices: 3D Numerical Simulation of the Flow. J. Multidiscip. Eng. Sci. Technol. 2020, 7, 12293–12300. [Google Scholar]
- Quaresma, A.L.; Ferreira, R.M.L.; Pinheiro, A.N. Comparative Analysis of Particle Image Velocimetry and Acoustic Doppler Velocimetry in Relation to a Pool-Type Fishway Flow. J. Hydraul. Res. 2017, 55, 582–591. [Google Scholar] [CrossRef]
- Bayon, A.; Valero, D.; García-Bartual, R.; Vallés-Morán, F.J.; López-Jiménez, P.A. Performance Assessment of OpenFOAM and FLOW-3D in the Numerical Modeling of a Low Reynolds Number Hydraulic Jump. Environ. Model. Softw. 2016, 80, 322–335. [Google Scholar] [CrossRef]
- Ferdos, F.; Dargahi, B. A Study of Turbulent Flow in Large-Scale Porous Media at High Reynolds Numbers. Part II: Flow Physics. J. Hydraul. Res. 2016, 54, 678–691. [Google Scholar] [CrossRef]
- Savage, B.M.; Johnson, M.C. Flow over Ogee Spillway: Physical and Numerical Model Case Study. J. Hydraul. Eng. 2001, 127, 640–649. [Google Scholar] [CrossRef]
- Schwartz, J.S.; Neff, K.J.; Dworak, F.E.; Woockman, R.R. Restoring Riffle-Pool Structure in an Incised, Straightened Urban Stream Channel Using an Ecohydraulic Modeling Approach. Ecol. Eng. 2015, 78, 112–126. [Google Scholar] [CrossRef]
- Duguay, J.M.; Lacey, R.W.J. Numerical Study of an Innovative Fish Ladder Design for Perched Culverts. Can. J. Civ. Eng. 2016, 43, 173–181. [Google Scholar] [CrossRef]
- Feurich, R.; Boubée, J.; Olsen, N.R.B. Improvement of Fish Passage in Culverts Using CFD. Ecol. Eng. 2012, 47, 1–8. [Google Scholar] [CrossRef]
- Fuentes-Pérez, J.F.; Quaresma, A.L.; Pinheiro, A.; Sanz-Ronda, F.J. OpenFOAM vs FLOW-3D: A Comparative Study of Vertical Slot Fishway Modelling. Ecol. Eng. 2022, 174, 106446. [Google Scholar] [CrossRef]
- Kim, S.; Yu, K.; Yoon, B.; Lim, Y. A Numerical Study on Hydraulic Characteristics in the Ice Harbor-Type Fishway. KSCE J. Civ. Eng. 2012, 16, 265–272. [Google Scholar] [CrossRef]
- Kolden, E.; Fox, B.D.; Bledsoe, B.P.; Kondratieff, M.C. Modelling Whitewater Park Hydraulics and Fish Habitat in Colorado. River Res. Appl. 2016, 32, 1116–1127. [Google Scholar] [CrossRef]
- Hirt, C.; Sicilian, J. A Porosity Technique for the Definition of Obstacles in Rectangular Cell Meshes. In Proceedings of the 4th International Conference Numerical Ship Hydrodynamics, Washington, DC, USA, 24–27 September 1985; p. 19. [Google Scholar]
- Hirt, C.W.; Nichols, B.D. Volume of Fluid (VOF) Method for the Dynamics of Free Boundaries. J. Comput. Phys. 1981, 39, 201–225. [Google Scholar] [CrossRef]
- Barkhudarov, M. Multi-Block Gridding Technique for FLOW-3D (Revised); Flow Science Technical Note #59-R2, FSI-00-TN59-R2; Flow Science Inc.: Santa Fe, NM, USA, 2004. [Google Scholar]
- Yao, G.F. Development of New Pressure-Velocity Solvers in FLOW-3; Flow Science Technical Note, FSI-04-TN68; Flow Science Inc.: Santa Fe, NM, USA, 2004. [Google Scholar]
- Barrett, R.; Berry, M.; Chan, T.F.; Demmel, J.; Donato, J.M.; Dongarra, J.; Eijkhout, V.; Pozo, R.; Romine, C. Templates for the Solution of Linear Systems: Building Blocks for Iterative Methods. Math. Comput. 1994, 64, 1349. [Google Scholar]
- Douglas, J.F.; Gasiorek, J.M.; Swaffield, J.A. Fluid Mechanics, 4th ed.; Pearson Education Limited: Edinburgh Gate, UK, 2001; ISBN 0-582-41476-8. [Google Scholar]
- Celik, I.; Ghia, U.; Roache, P.; Freitas, C.; Coleman, H.; Raad, P. Procedure for Estimation and Reporting of Uncertainty Due to Discretization in CFD Applications. J. Fluids Eng. 2008, 130, 078001. [Google Scholar] [CrossRef]
- Celik, I.B.; Cehreli, Z.N.; Yavuz, I. Index of Resolution Quality for Large Eddy Simulations. J. Fluids Eng. 2005, 127, 949–958. [Google Scholar] [CrossRef]
- Barton, A.F.; Keller, R.J.; Katopodis, C. Verification of a Numerical Model for the Prediction of Low Slope Vertical Slot Fishway Hydraulics. Australas. J. Water Resour. 2009, 13, 53–60. [Google Scholar] [CrossRef]
- Bermúdez, M.; Puertas, J.; Cea, L.; Pena, L.; Balairón, L. Influence of Pool Geometry on the Biological Efficiency of Vertical Slot Fishways. Ecol. Eng. 2010, 36, 1355–1364. [Google Scholar] [CrossRef]
- Bombač, M.; Četina, M.; Novak, G. Study on Flow Characteristics in Vertical Slot Fishways Regarding Slot Layout Optimization. Ecol. Eng. 2017, 107, 126–136. [Google Scholar] [CrossRef]
- Marriner, B.A.; Baki, A.B.M.; Zhu, D.Z.; Thiem, J.D.; Cooke, S.J.; Katopodis, C. Field and Numerical Assessment of Turning Pool Hydraulics in a Vertical Slot Fishway. Ecol. Eng. 2014, 63, 88–101. [Google Scholar] [CrossRef]
- Quaranta, E.; Katopodis, C.; Revelli, R.; Comoglio, C. Turbulent Flow Field Comparison and Related Suitability for Fish Passage of a Standard and a Simplified Low-gradient Vertical Slot Fishway. River Res. Appl. 2017, 33, 1295–1305. [Google Scholar] [CrossRef]
- Willmott, C.J.; Robeson, S.M.; Matsuura, K. A Refined Index of Model Performance. Int. J. Climatol. 2012, 32, 2088–2094. [Google Scholar] [CrossRef]
- Santos, H.A.; Pinheiro, A.P.; Mendes, L.M.M.; Junho, R.A.C. Turbulent Flow in a Central Vertical Slot Fishway: Numerical Assessment with RANS and LES Schemes. J. Irrig. Drain. Eng. 2022, 148, 04022025. [Google Scholar] [CrossRef]
- Cheng, Y.; Lien, F.S.; Yee, E.; Sinclair, R. A Comparison of Large Eddy Simulations with a Standard k–ε Reynolds-Averaged Navier–Stokes Model for the Prediction of a Fully Developed Turbulent Flow over a Matrix of Cubes. J. Wind Eng. Ind. Aerodyn. 2003, 91, 1301–1328. [Google Scholar] [CrossRef]
- Constantinescu, G.; Koken, M.; Zeng, J. The Structure of Turbulent Flow in an Open Channel Bend of Strong Curvature with Deformed Bed: Insight Provided by Detached Eddy Simulation. Water Resour. Res. 2011, 47, 2010WR010114. [Google Scholar] [CrossRef]
- Xia, J.L.; Yadigaroglu, G.; Liu, Y.S.; Schmidli, J.; Smith, B.L. Numerical and Experimental Study of Swirling Flow in a Model Combustor. Int. J. Heat Mass Transf. 1998, 41, 1485–1497. [Google Scholar] [CrossRef]
- Lejeune, A.-F.; Calluaud, D.; Pineau, G.; David, L. Numerical Comparison of Rans, Urans and Les Simulations Of Turbulent Flow In Vertical Double Slot Fishways. In Proceedings of the 39th IAHR World Congress, Granada, Spain, 19–24 June; International Association for Hydro-Environment Engineering and Research (IAHR): Granada, Spain, 2022; pp. 1378–1386. [Google Scholar]
- Chorda, J.; Maubourguet, M.M.; Roux, H.; Larinier, M.; Tarrade, L.; David, L. Two-Dimensional Free Surface Flow Numerical Model for Vertical Slot Fishways. J. Hydraul. Res. 2010, 48, 141–151. [Google Scholar] [CrossRef]
- Andersson, B. Computational Fluid Dynamics for Engineers; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Schmitt, F.G. About Boussinesq’s Turbulent Viscosity Hypothesis: Historical Remarks and a Direct Evaluation of Its Validity. Comptes Rendus Mécanique 2007, 335, 617–627. [Google Scholar] [CrossRef]
- Bravo-Córdoba, F.J.; Fuentes-Pérez, J.F.; Valbuena-Castro, J.; Martínez De Azagra-Paredes, A.; Sanz-Ronda, F.J. Turning Pools in Stepped Fishways: Biological Assessment via Fish Response and CFD Models. Water 2021, 13, 1186. [Google Scholar] [CrossRef]
- Silva, A.T.; Lucas, M.C.; Castro-Santos, T.; Katopodis, C.; Baumgartner, L.J.; Thiem, J.D.; Aarestrup, K.; Pompeu, P.S.; O’Brien, G.C.; Braun, D.C.; et al. The Future of Fish Passage Science, Engineering, and Practice. Fish Fish. 2018, 19, 340–362. [Google Scholar] [CrossRef]
- Liao, J.C. Fish Swimming Efficiency. Curr. Biol. 2022, 32, R666–R671. [Google Scholar] [CrossRef]
- Tritico, H.M.; Cotel, A.J. The Effects of Turbulent Eddies on the Stability and Critical Swimming Speed of Creek Chub (Semotilus Atromaculatus). J. Exp. Biol. 2010, 213, 2284–2293. [Google Scholar] [CrossRef]
- Gao, Z.; Andersson, H.I.; Dai, H.; Jiang, F.; Zhao, L. A New Eulerian–Lagrangian Agent Method to Model Fish Paths in a Vertical Slot Fishway. Ecol. Eng. 2016, 88, 217–225. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Source | Measurement | Numerical Model | |||
|---|---|---|---|---|---|
| Turbulence Model | - | k-ε | RNG | k-ω | LES |
| Discharge (ls−1) | 4.4 | 4.6 | 4.6 | 4.6 | 4.6 |
| Relative difference (%) | - | 4.6 | 4.7 | 4.6 | 4.8 |
| Flow depth (m) 1 | 0.352 | 0.364 | 0.363 | 0.364 | 0.363 |
| Average relative difference (%) 1 | - | 3.6 | 3.5 | 3.7 | 3.5 |
| MAD (ms−1) | R2 | dr | MAD (ms−1) | R2 | dr | MAD (ms−1) | R2 | dr | MAD (ms−1) | R2 | dr | ||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| CFD vs. ADV 1 | k-ε | 0.060 | 0.82 | 0.75 | 0.030 | 0.76 | 0.75 | 0.037 | 0.54 | 0.63 | 0.061 | 0.66 | 0.60 |
| RNG | 0.037 | 0.91 | 0.85 | 0.019 | 0.90 | 0.84 | 0.025 | 0.77 | 0.75 | 0.040 | 0.82 | 0.73 | |
| k-ω | 0.039 | 0.92 | 0.84 | 0.018 | 0.92 | 0.85 | 0.027 | 0.75 | 0.73 | 0.037 | 0.83 | 0.75 | |
| LES | 0.031 | 0.93 | 0.87 | 0.020 | 0.90 | 0.83 | 0.026 | 0.78 | 0.73 | 0.032 | 0.85 | 0.79 | |
| CFD vs. PIV 2 | k-ε | 0.069 | 0.80 | 0.78 | 0.032 | 0.76 | 0.75 | 0.042 | 0.45 | 0.63 | 3 | ||
| RNG | 0.040 | 0.92 | 0.87 | 0.021 | 0.90 | 0.83 | 0.028 | 0.72 | 0.75 | ||||
| k-ω | 0.047 | 0.92 | 0.85 | 0.021 | 0.89 | 0.83 | 0.031 | 0.68 | 0.72 | ||||
| LES | 0.038 | 0.92 | 0.88 | 0.023 | 0.90 | 0.82 | 0.035 | 0.73 | 0.69 | ||||
| κ | ||||
|---|---|---|---|---|
| MAD (m2s−2) | R2 | dr | ||
| CFD vs. ADV 1 | k-ε | 0.0042 | 0.66 | 0.71 |
| RNG | 0.0037 | 0.71 | 0.75 | |
| k-ω | 0.0067 | 0.71 | 0.55 | |
| LES | 0.0025 | 0.77 | 0.83 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Quaresma, A.L.; Romão, F.; Pinheiro, A.N. A Comparative Assessment of Reynolds Averaged Navier–Stokes and Large-Eddy Simulation Models: Choosing the Best for Pool-Type Fishway Flow Simulations. Water 2025, 17, 686. https://doi.org/10.3390/w17050686
Quaresma AL, Romão F, Pinheiro AN. A Comparative Assessment of Reynolds Averaged Navier–Stokes and Large-Eddy Simulation Models: Choosing the Best for Pool-Type Fishway Flow Simulations. Water. 2025; 17(5):686. https://doi.org/10.3390/w17050686
Chicago/Turabian StyleQuaresma, Ana L., Filipe Romão, and António N. Pinheiro. 2025. "A Comparative Assessment of Reynolds Averaged Navier–Stokes and Large-Eddy Simulation Models: Choosing the Best for Pool-Type Fishway Flow Simulations" Water 17, no. 5: 686. https://doi.org/10.3390/w17050686
APA StyleQuaresma, A. L., Romão, F., & Pinheiro, A. N. (2025). A Comparative Assessment of Reynolds Averaged Navier–Stokes and Large-Eddy Simulation Models: Choosing the Best for Pool-Type Fishway Flow Simulations. Water, 17(5), 686. https://doi.org/10.3390/w17050686