1. Introduction
The marine aquaculture industry is a vital part of China’s marine economy and a key source of high-quality protein for human consumption. In recent years, the Chinese government has actively supported the development of deep-sea net cage aquaculture, promoting the establishment of large-scale marine ranches along coastal areas. This effort aims to address the challenges faced by traditional offshore cage farming, such as pollution, disease, and damage from typhoons. However, the advancement of net cage aquaculture technology has also introduced new challenges, with biofouling on the net cages being a particularly significant issue. As shown in
Figure 1, the long-term immersion of net cages in seawater at depths of several dozen meters leads to the attachment of marine organisms, primarily algae, sea squirts, and crustaceans. The accumulation of these organisms increases the weight and stress on the net, compromising its structural integrity and potentially causing the escape of farmed species [
1]. Additionally, these attachments obstruct water flow between the inside and outside of the cage, reducing dissolved oxygen levels and impairing the cage’s filtration performance [
2], which negatively impacts the quality of the aquaculture environment. Furthermore, the enclosed nature of the cage fosters the growth of pathogenic bacteria, particularly from leftover feed, which can lead to disease outbreaks and large-scale fish mortality. This has a significant effect on the survival rate, yield, and quality of farmed fish [
3,
4,
5]. For a long time, biofouling has been a persistent issue for marine cage aquaculture, posing ongoing challenges to the industry.
Currently, three main methods are used to address biofouling in net cages: manual cleaning, anti-fouling coatings, and mechanical cleaning equipment [
6]. The manual cleaning method involves regularly replacing the nets, dragging them ashore for sun exposure, or having divers clean the nets underwater [
7]. However, this approach is labor-intensive, inefficient, costly, and generates waste that can pollute the environment. The anti-fouling coating method involves applying a special coating to the net surfaces to prevent organism attachment. While some coatings are designed to be non-toxic, others contain heavy metal ions that can pollute the marine environment and accumulate in aquaculture species, posing risks to food safety and health [
8]. While some companies [
9] have developed non-toxic, anti-biofouling nets that extend the net replacement cycle, these solutions do not eliminate the problem of biological attachment. The most commonly used method for cleaning net cages is mechanical cleaning. Siyuan Liu [
10] developed a net cage cleaning robot that uses water jets through a manifold to clean the net. The robot crawls along the net on tracks and is equipped with an underwater camera to visualize the cleaning process. Similarly, Aurora Marine [
11] in Australia developed an ROV underwater net washing robot with a tracked structure and dual water flow system for high-pressure cleaning. AKVA, a Norwegian company [
12], designed the FNC8 mesh cleaning robot, which uses high-pressure water jets on rotating disks to remove fouling organisms. While these cleaning robots represent advanced technology, they are not as effective in Chinese waters, and they also come with high costs and maintenance requirements.
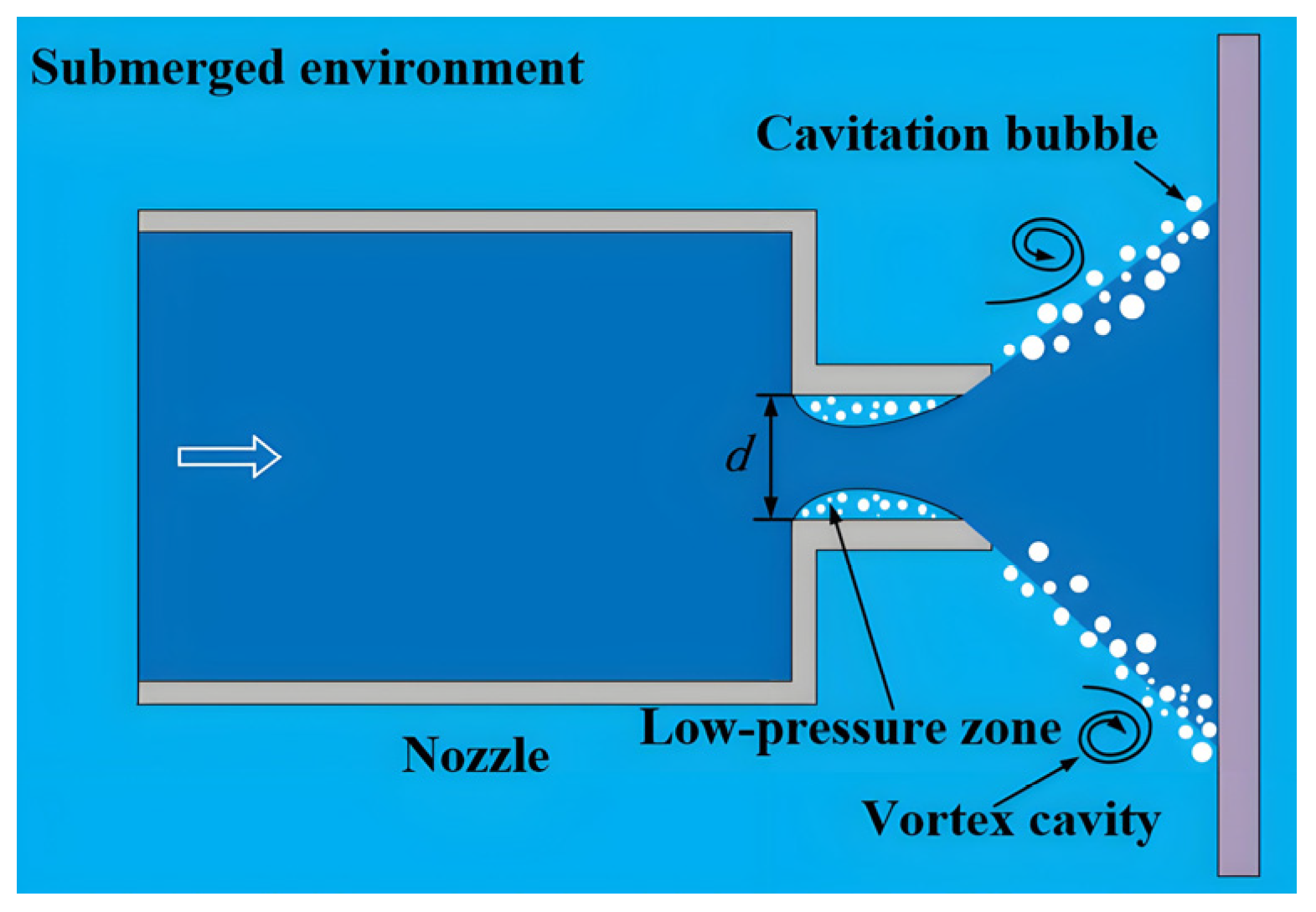
Mechanical cleaning equipment is well suited for the aquaculture industry due to its efficiency, safety, cleaning quality, and cost-effectiveness. However, the effectiveness of standard water jet cleaning diminishes with increased water depth, leading to longer operation times. In contrast, the cavitation jet cleaning method generates a stronger local impact force, enhancing cleaning performance and effectively addressing the limitations of traditional water jet systems. Rayleigh conducted foundational research on the kinematics and dynamics of cavitation bubbles, deriving a differential equation to describe their behavior. Later, Plesset refined this equation by incorporating the effects of surface tension and viscosity during bubble growth and collapse, leading to the development of the Rayleigh–Plesset equation [
13]. Zhong [
14] demonstrated the effectiveness of underwater cavitation jets in removing marine biofouling from ship hulls, confirming the feasibility of this method for similar applications. When cavitation bubbles collapse underwater, they generate intense pressure disturbances, significantly increasing the stress on the surface being cleaned. Studies have shown that under the same pump pressure and flow rate, the impact pressure of a cavitation jet can be 8.6 to 124 times greater than that of a continuous jet. This high-pressure impact effectively shatters or dislodges biofouling from the net surface [
15,
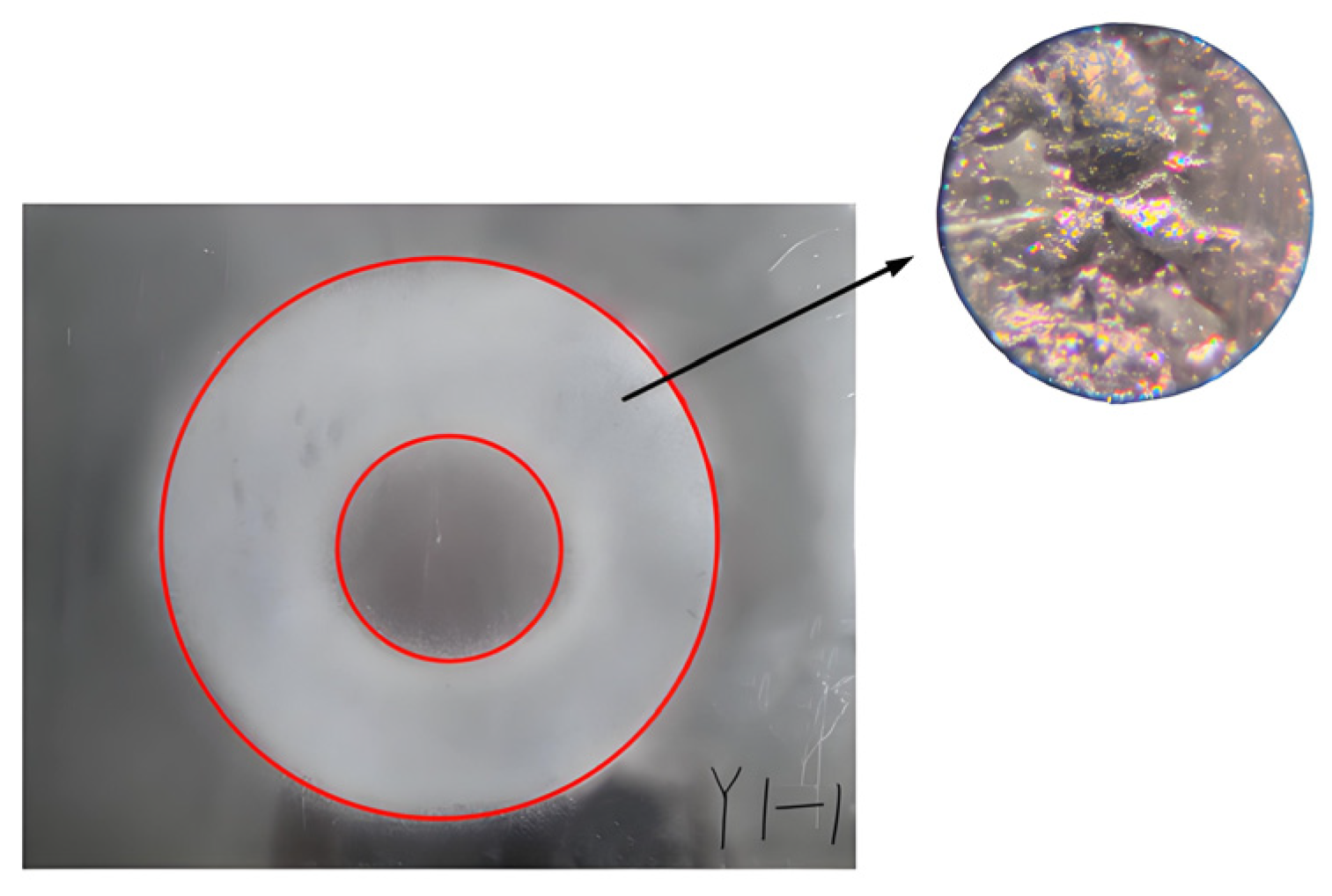
16]. Guha [
17] conducted high-speed camera experiments on nozzles and observed that when the cavitation cloud formed on a target surface and collapsed, it generated a significant impact force, which in turn created a ring-shaped shock wave on the surface. Liu Haishui and colleagues [
18] performed similar experiments on nozzles with different structures, finding that the cavitation clouds produced by these nozzles followed a distinct cycle, including stages of generation, development, rupture, and collapse. Yuan Guangyu [
19] studied icebreaking using cavitating water jets in a Venturi nozzle setup. His research, which involved indoor experiments, analyzed the interaction between the cavitation jet and ice, comparing the pressure exerted on a rigid wall by the cavitating jet with that of a non-cavitating jet. These studies highlight the potential for applying cavitation technology to the cleaning of aquaculture net cages.
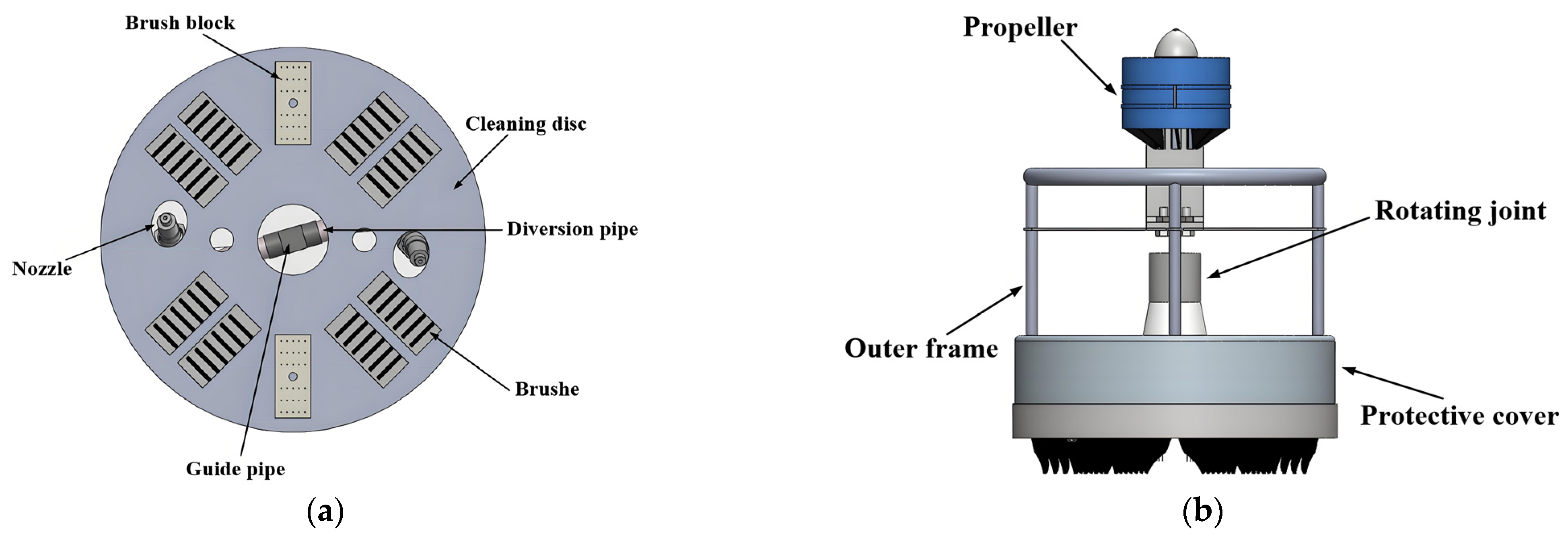
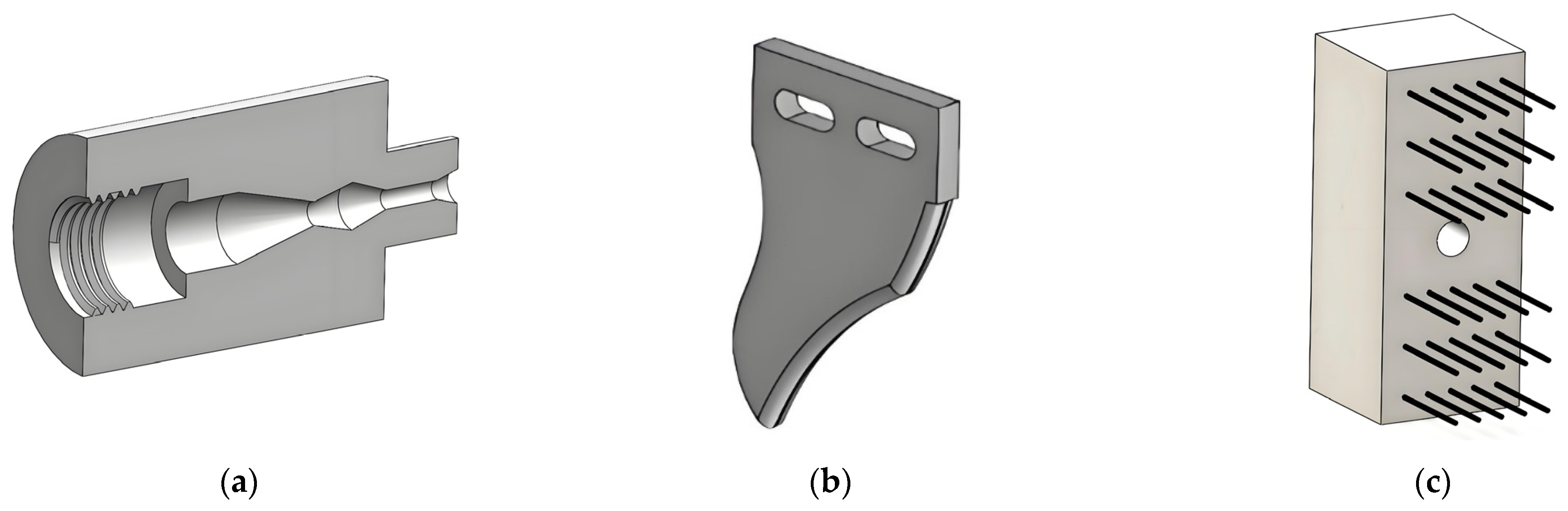
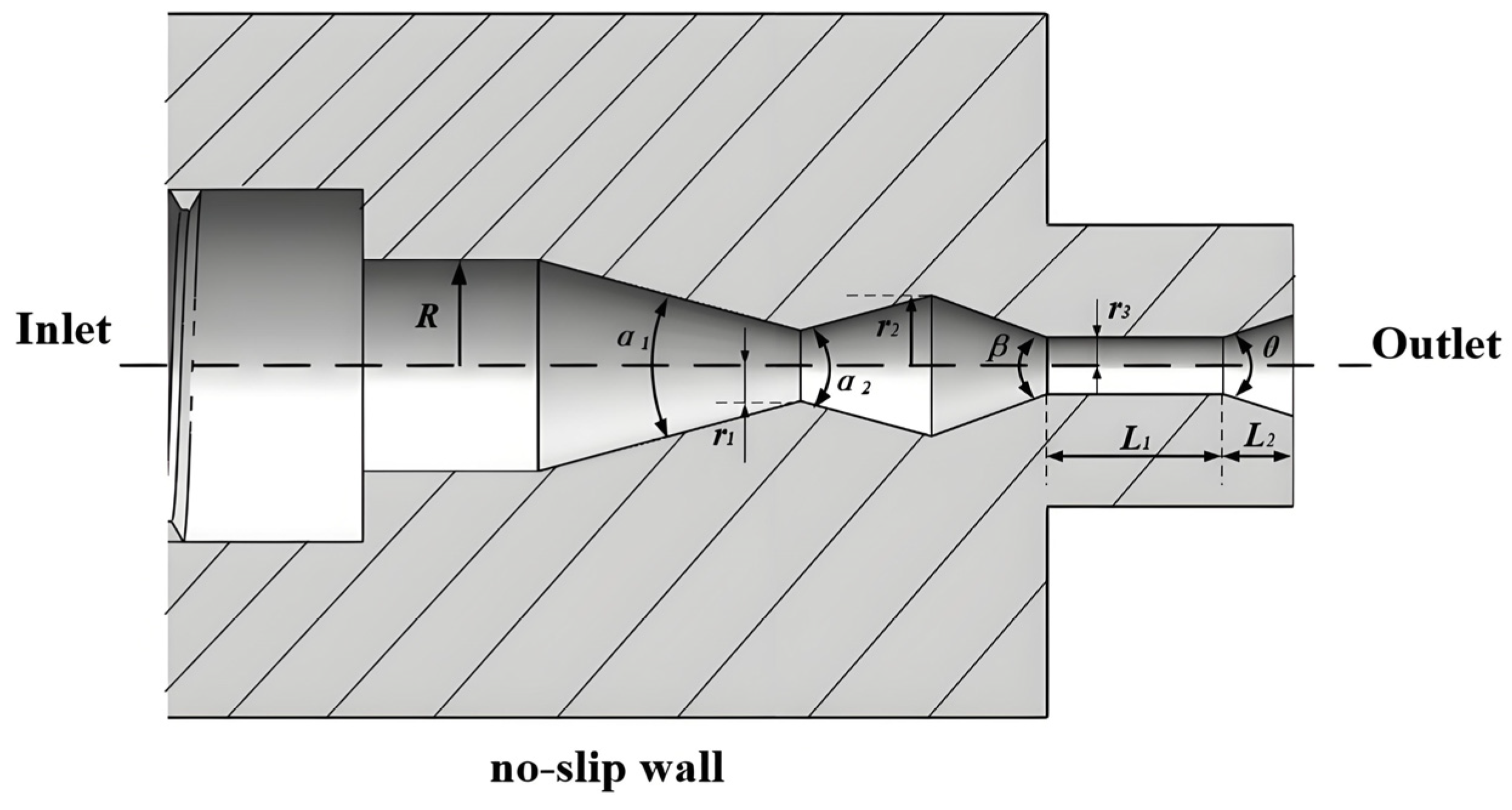
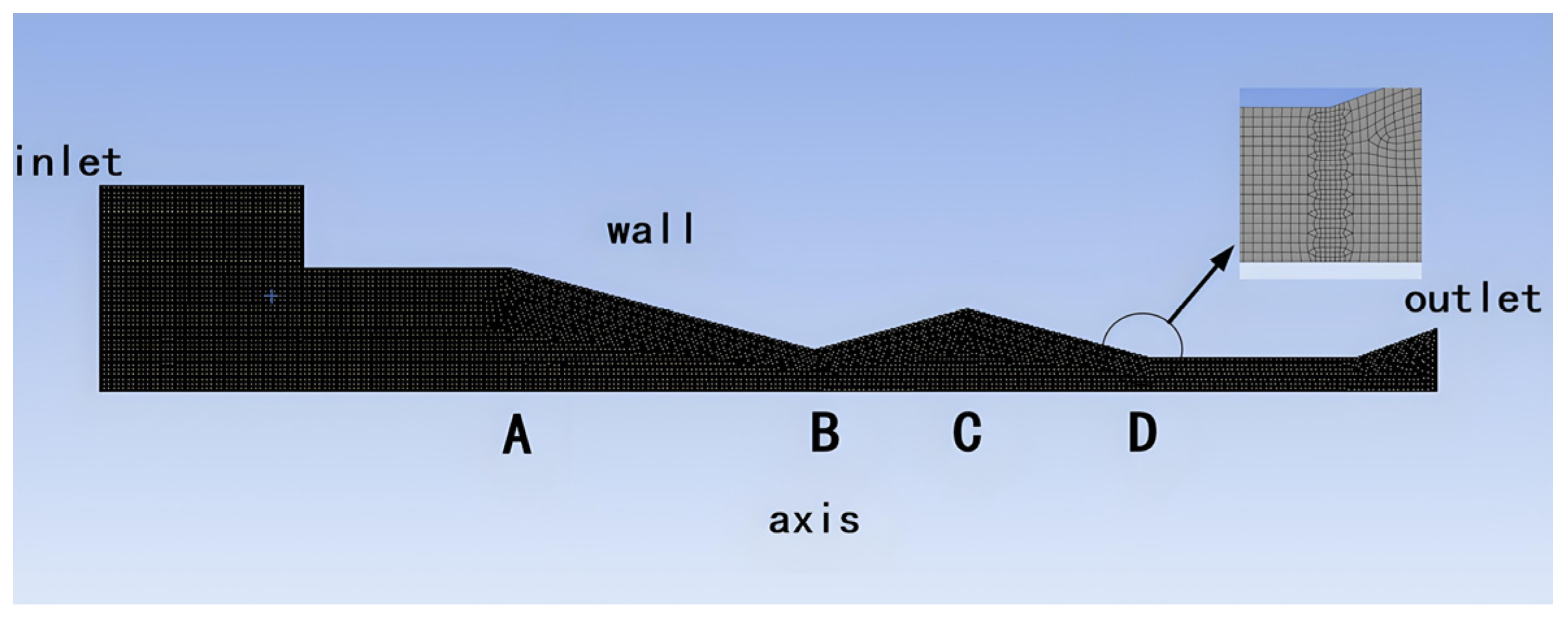
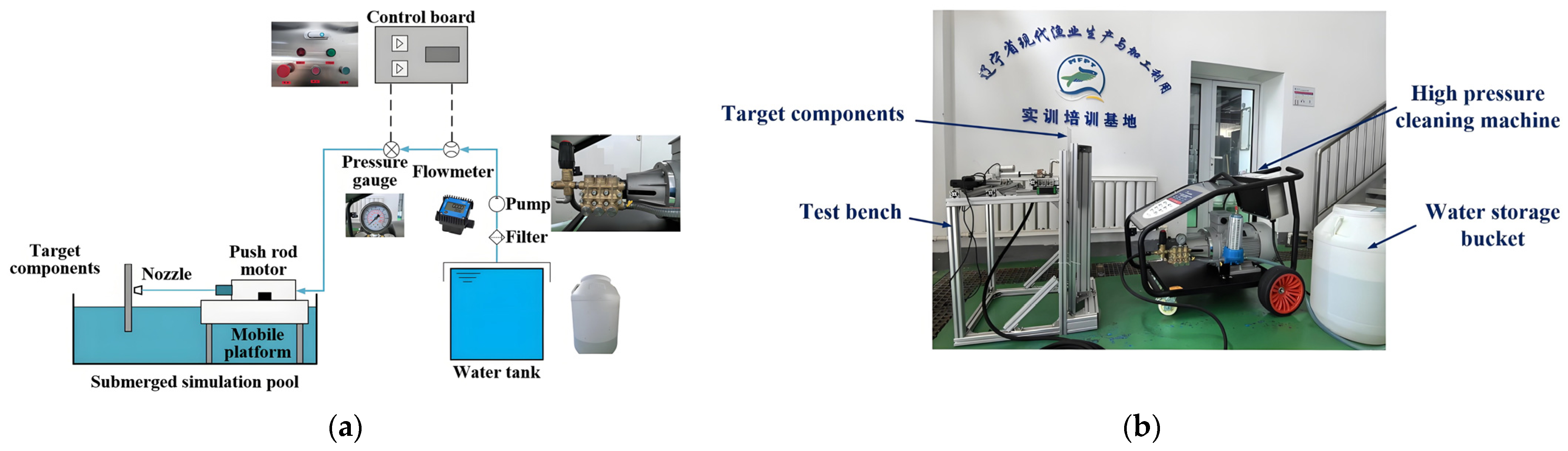
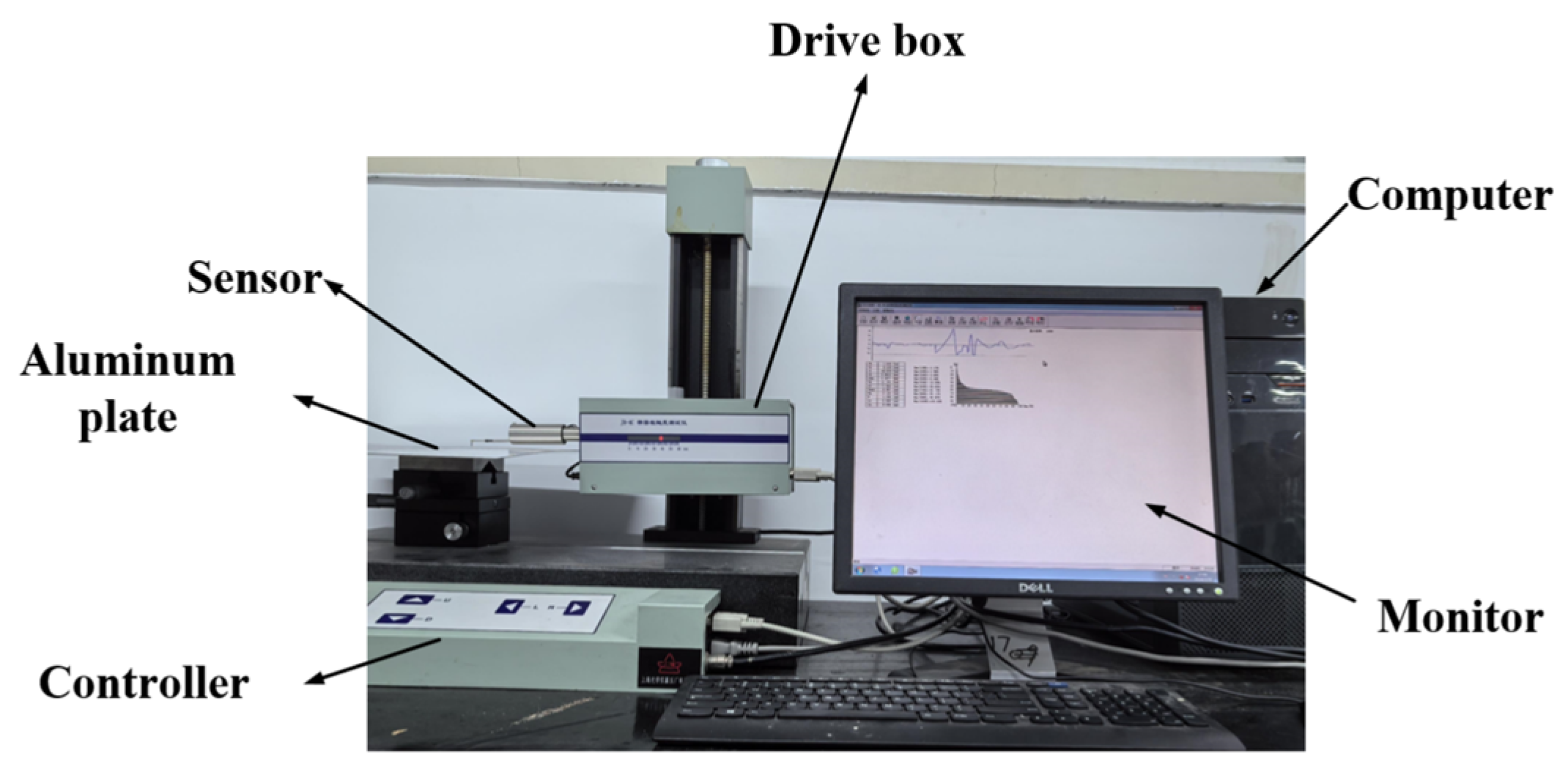
The effectiveness of existing foreign net cage cleaning devices in Chinese coastal waters remains unsatisfactory. Most domestic devices are still in the research-and-testing phase. Furthermore, the high cost of cleaning equipment designed for small to medium-sized cages makes them unaffordable for many aquaculture farmers. To address these challenges, this study combines the technical requirements for cleaning with the principles of cavitation jet technology. We designed a cleaning device that integrates cavitation water jets and mechanical crushing, specifically tailored for small and medium-sized net cages. Using Fluent finite volume simulation software, we conducted a numerical simulation of the nozzle’s cavitation process. Based on the simulation results, we optimized the nozzle’s structural parameters and refined its operating parameters through actual cavitation tests. This research aims to enhance cleaning efficiency, reduce energy consumption, minimize labor demands, and lessen environmental impact. It also provides valuable insights for the future development of net cage cleaning equipment.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}