4.1. Influence of Cylinders with Different Diameters on Wave Field
Table 3 presents the calculation cases for this study. By changing the cylinder diameter to adjust the cylinder scale ratio, wave forces on smooth cylinders and wave field data around them are obtained, thereby enabling the investigation of how wave forces on vertical cylinders change with scale parameters. Here, the water depth is under finite water depth conditions, and the wave parameters satisfy the linear problem condition
. The Reynolds number is defined as
, and the Keulegan–Carpenter number is defined as
, where
is the maximum horizontal velocity of water particles at the still water surface.
To obtain wave field data around the cylinder, measurement points need to be set up in its vicinity. The distance from a measurement point to the cylinder’s center is defined as . Circular measurement points are arranged at (the ratio of the distance from the measurement point to the center to the cylinder radius ) equal to 1, 1.5, 2, 2.5, 3, 3.5, 4, 4.5, and 5 around the cylinder, with 64 × 9 annular measurement points monitoring the circumferential wave height. Linear measurement points are set where ranges from 1 to 10 on both the wave-facing side and leeward side of the cylinder to monitor wave field changes in front of and behind the cylinder.
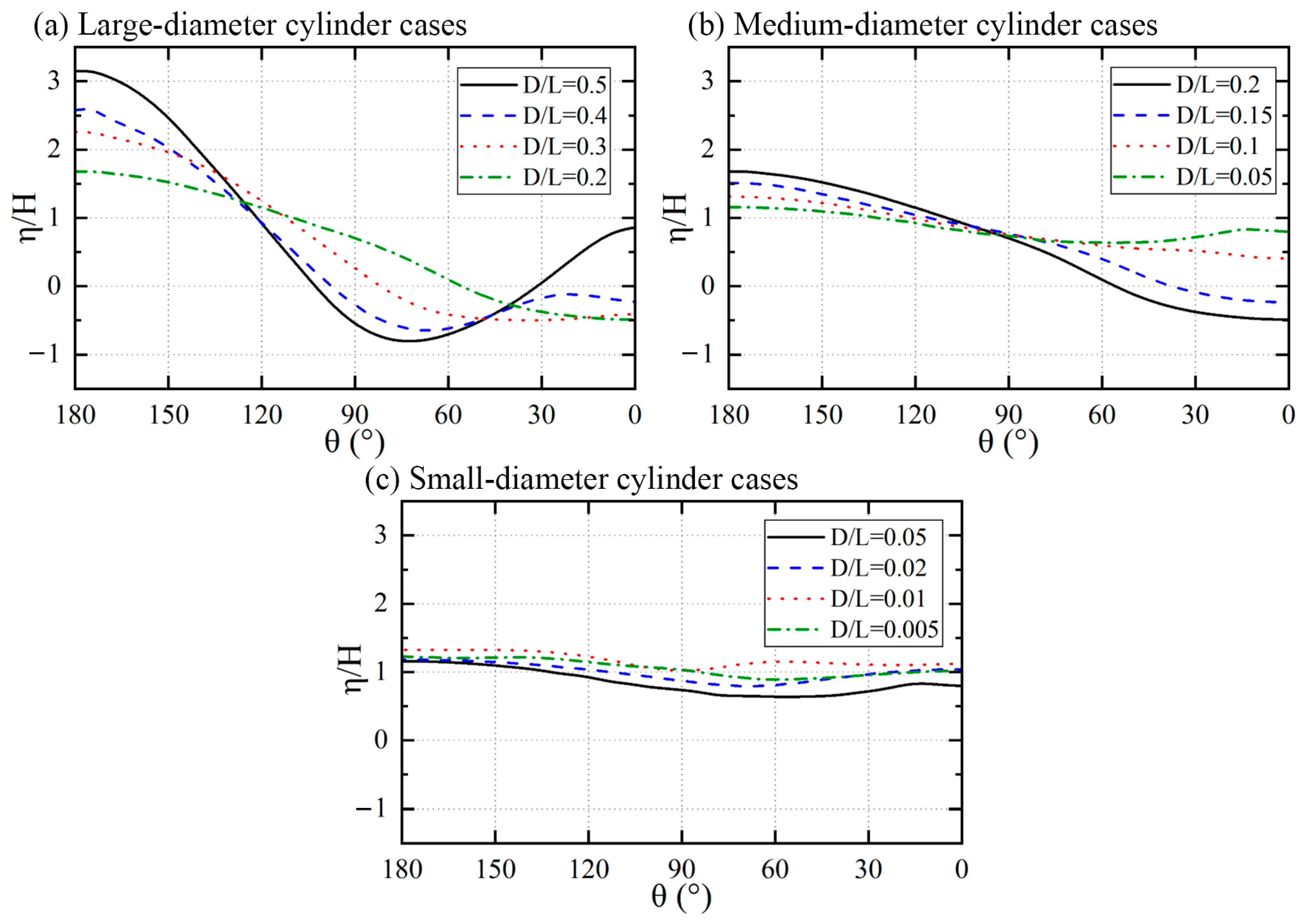
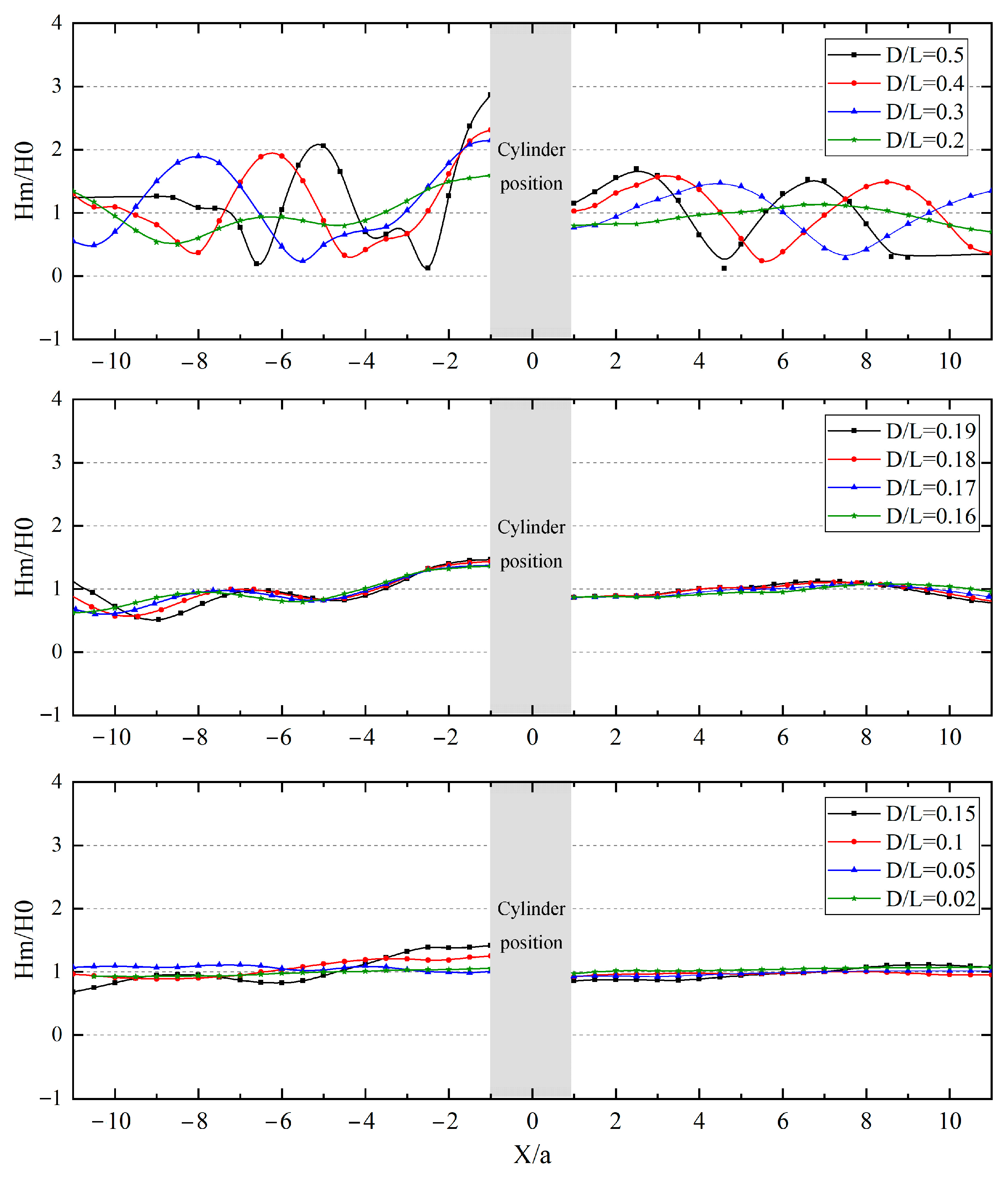
The maximum wave surging on the cylinder surface occurs at the apex of the wave-facing side of the cylinder. As shown in
Figure 10, the wave heights around the cylinder under different cylinder diameter cases at the moment of maximum surging are presented. In the large-diameter cylinder case shown in
Figure 10a, as the cylinder diameter increases, the wave height distributions near both the wave-facing and leeward sides gradually increase. When
, a remarkably distinct minimum wave height appears near
at the rear side of the tail. As the cylinder diameter decreases, this minimum value gradually increases and shifts backward toward the leeward side. In the medium-diameter cylinder case (transition range from small to large diameters) shown in
Figure 10b, as the cylinder diameter increases, the wave height amplitude near the wave-facing side gradually increases, while the wave height near the leeward side gradually decreases. When
, the wave height distributions around the circumference tend to be uniform. Within the transition range, the minimum wave height only appears on the leeward side of the cylinder. For the small-diameter cylinder with
, the minimum value shifts forward again. In the small-diameter cylinder case shown in
Figure 10c, as the cylinder diameter increases, the wave heights around the entire cylinder gradually decrease, and the minimum wave height reappears within the range of
.
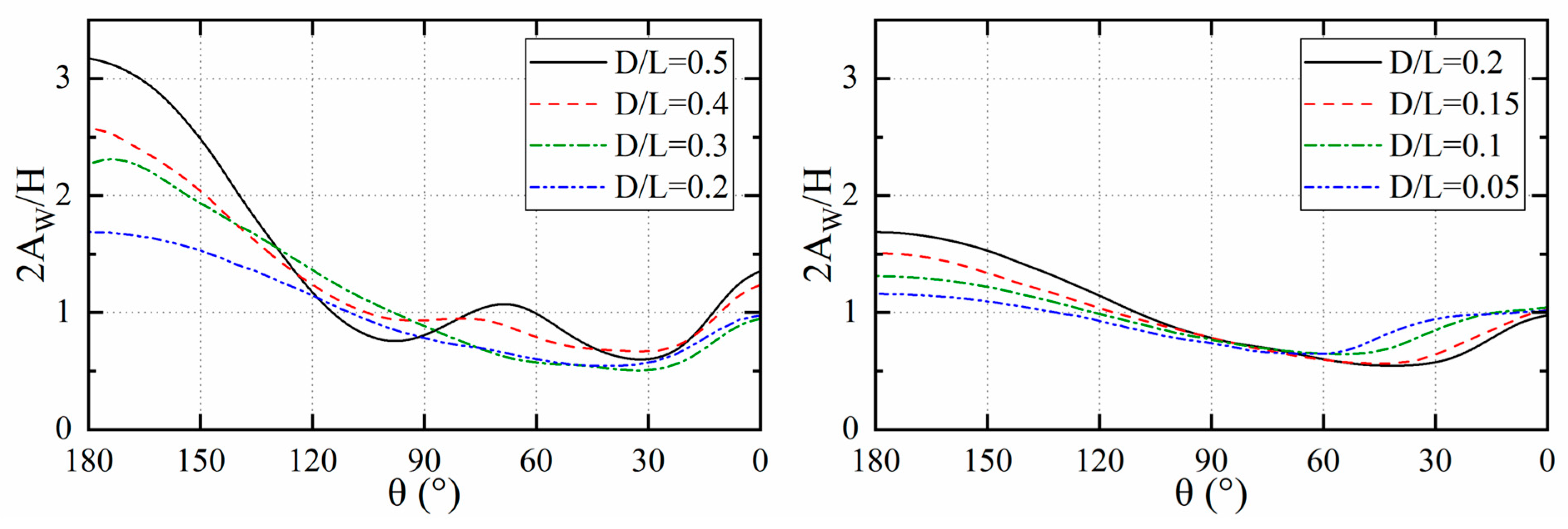
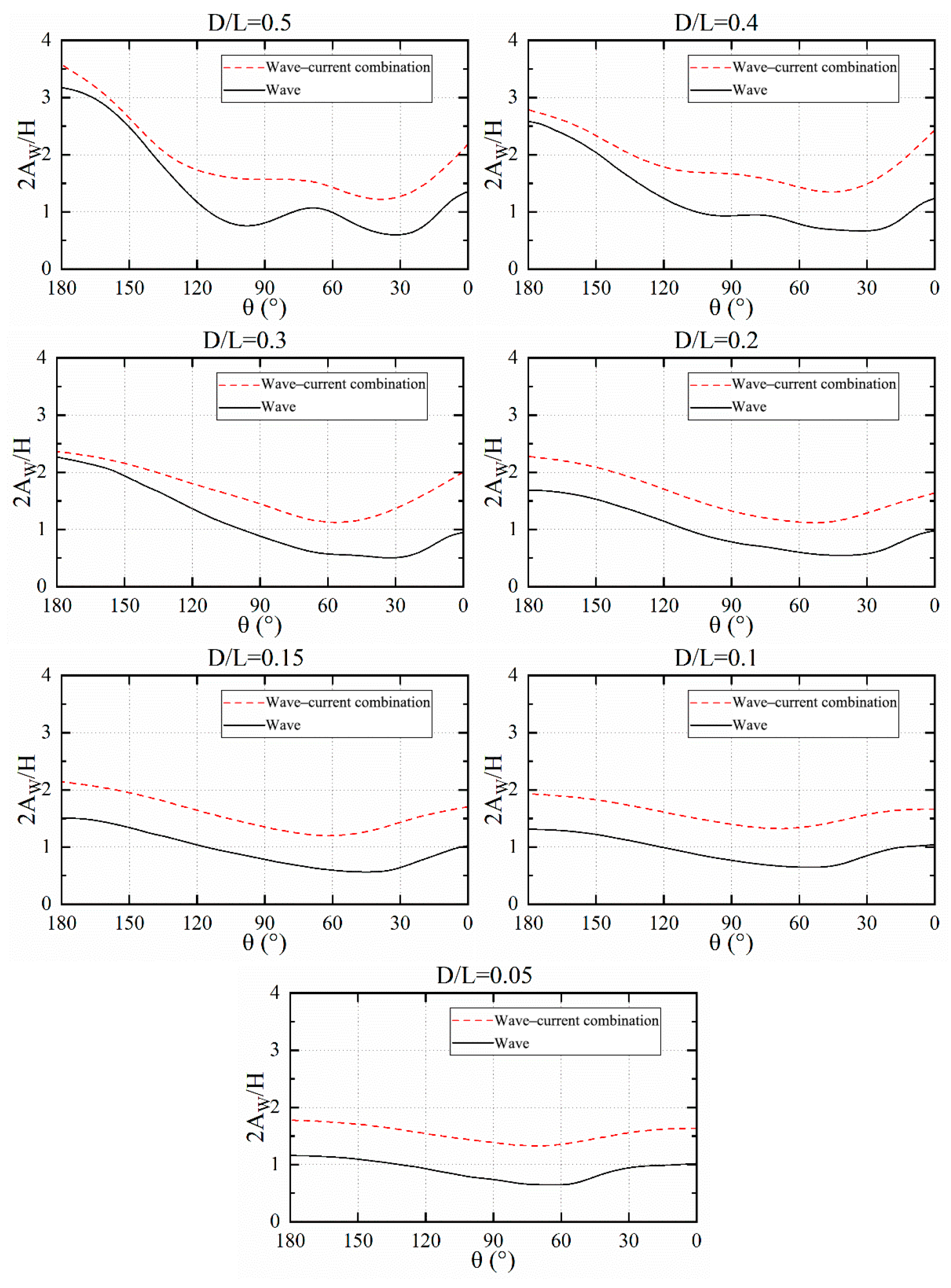
The wave amplitude
extracted from each measurement point around the cylinder is nondimensionalized with the incident wave amplitude
, yielding the distribution of wave run-up ratio
around the cylinder under different cylinder diameter cases, as shown in
Figure 11. In
Figure 11, it can be seen that when the cylinder scale ranges from
to
, the wave run-up distribution along the column is basically consistent. The maximum wave run-up occurs at the central position of the wave-facing side of the cylinder, after which the run-up amplitude gradually decreases due to continuous dissipation of water energy, reaching a minimum near
. Finally, two lateral waves propagating along the column sides superimpose near the leeward side of the column, causing an increasing trend in wave run-up amplitude. Different from the above patterns, starting from
, as the cylinder diameter increases, the diffraction effects on the wave field cause a secondary upward trend in waves within the
range at the rear side of the cylinder, resulting in three maximum points at the wave-facing side, leeward side, and the rear side of the cylinder.
To demonstrate the diffraction effect of the cylinder on the surrounding wave field, the average wave height
at measurement points within
around the cylinder is extracted in polar coordinates and compared with the incident wave height
, yielding the polar coordinate contour plot shown in
Figure 12. The black solid line in the figure represents the
contour line, and the wave direction is from left to right. As can be seen from the figure, from the wave-facing side at
to the leeward side at
, regardless of the cylinder size, a wave trough always exists in the shadow zone between
(the blue area at the rear side of the cylinder in the figure). As the cylinder diameter increases, the diffraction effect caused by the cylinder gradually intensifies, leading to a gradual reduction in the scope of high-wave and low-wave regions, with significant changes in the magnitude of average wave height and more concentrated energy. When
, the
contour line is located within a 4-fold radius range. For
, the influence range of the
contour line extends beyond 5 times the cylinder radius, and the variation amplitude of the average wave height within the 5-fold radius range has decreased to less than 15%, which can be approximately considered as having no influence on the surrounding wave field. The Morison equation is applied to solve the hydrodynamic coefficients.
In studies on the wave dissipation effect of breakwaters, wave reflection and transmission coefficients are often used to evaluate the performance of breakwaters in dissipating waves. Regarding the influence of the cylinder on the surrounding wave field in this thesis, the reflection coefficient and transmission coefficient are similarly introduced to reflect the impact of the cylinder’s presence on the wave field generated by the superposition of front–back reflected waves and diffracted waves. The reflection coefficient is defined as the ratio of the average wave height at the measurement point of to the incident wave height, and the transmission coefficient is defined as the ratio of the wave height at the measurement point of to the incident wave height.
As shown in
Figure 13, the variation laws of
and
with
at different positions on the wave-facing and leeward sides of the cylinder under wave conditions of water depth
and wave height
are presented. To facilitate the display and comparison of coefficient changes in the front and rear regions, this series of cases is divided into large-diameter cylinder cases, transition–range–diameter cylinder cases, and small-diameter cylinder cases. The gray area in the middle represents the actual position of the cylinder. The abscissa denotes the ratio of the distance from the linear measurement points at
and
to the cylinder’s center to the radius. The left side of the cylinder is the wave incoming direction, meaning the left curve represents the reflection coefficient curve at
, and the right curve represents the transmission coefficient curve at
.
As can be seen from the reflection coefficient curve on the left side of the cylinder position, the presence of the cylindrical structure has a significant impact on the wave fields in the front and rear regions, and this impact gradually intensifies as the cylinder diameter increases. The extreme values in both the reflection coefficient and transmission coefficient curves reach larger or smaller magnitudes as the cylinder diameter increases. Overall, in terms of horizontal coordinate positions, increasing the cylinder diameter produces a very obvious compressing effect on the reflection and transmission coefficients of the surrounding wave field, indicating that the diffraction effect caused by the larger cylinder diameter gradually strengthens. Conversely, as the cylinder diameter decreases, the coefficients at each point gradually tend toward 1. In terms of the reflection coefficient, when , there is still a significant impact on the reflection coefficients between and . When , only the influence of wave reflection near the cylinder within needs to be considered. For the transmission coefficient, when , the influence of cylinder scale on wave transmission within can be disregarded; when , the influence of cylinder scale on wave transmission within no longer needs to be considered.
4.2. Wave Climb Under Combined Wave–Current Condition
To study the influence of water flow on wave run-up around the cylinder, a water flow with
u = 0.1 m/s is added under wave conditions, and the resulting wave run-up distribution is shown in
Figure 14. As shown in the figure, the presence of current significantly enhances the wave run-up effect across all cases. The distribution curves of wave run-up for each group of D/L cylinders under wave–current conditions exhibit trends similar to those under pure wave conditions. However, the influence of current on wave run-up around cylinders is not a simple linear amplification: the wave run-up near the wave-facing side is consistently smaller than that near the wave-back side. With the decrease in D/L, the wave run-up near the wave-facing side gradually approaches that near the wave-back side. Additionally, it is likely that due to the increase in cylinder size, the diffraction effect under current becomes more pronounced, leading to a stronger superposition effect of edge waves propagating from both sides near the wave-back side of the cylinder.
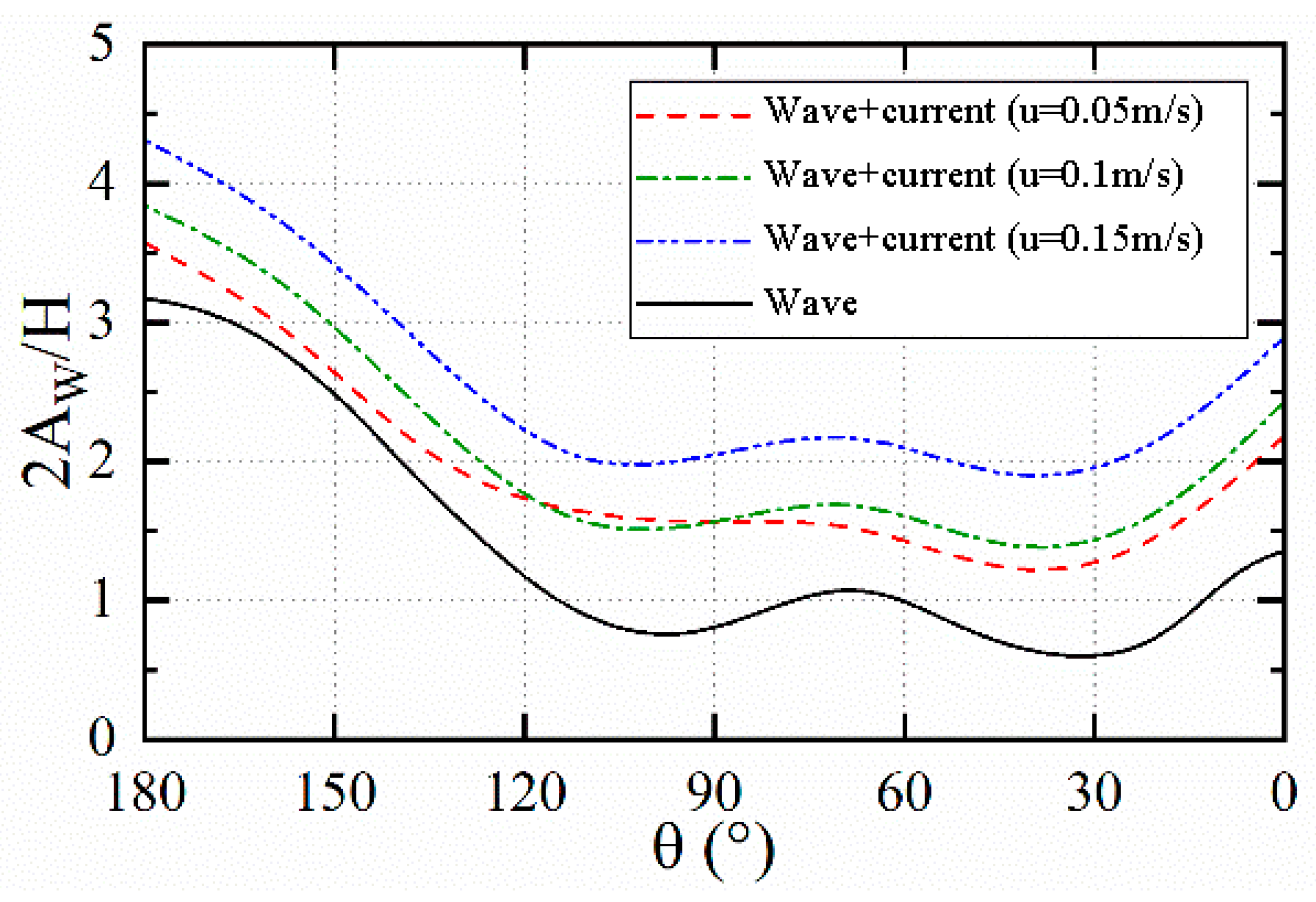
To investigate the influence of water flows with different velocities on the wave field, different flow velocities were added under the same wave field conditions. The wave height time history curves at the wave-facing side measurement points and the surrounding wave run-up distributions for the cylinder case with
are shown in
Figure 15. As can be seen from the figure, under the co-directional action of waves and currents, when the incident wave parameters and cylinder diameter remain unchanged, the greater the water flow velocity, the larger the overall upward displacement of the wave surface, and the more pronounced the wave run-up effect. The wave run-up on the wave-facing side of the cylinder exhibits linear growth: under pure waves,
; at
u = 0.05 m/s,
reaches 3.58; at
u = 0.1 m/s, it reaches 3.84; and at
u = 0.15 m/s, it reaches 4.31. The wave run-up on the leeward side increases significantly at
u = 0.05 m/s. Although the incident wave amplitude near
increases slightly at
u = 0.05 m/s, possibly due to numerical simulation residual accumulation, the increase in wave run-up height under wave–current combined conditions is very evident. This is because the increase in water particle velocity raises the fluid kinetic energy in the waves. This increase in kinetic energy directly reflects the enhancement of wave energy, enabling more energy to be released during wave–cylinder interaction. Part of the kinetic energy is converted into potential energy, causing run-up on the column surface with increased height, thereby increasing potential energy. This energy conversion process is an intuitive manifestation of the law of conservation and transformation of energy.
4.3. Mechanical Characteristics of Fan Foundation
For the regular waves involved in this paper, the maximum horizontal wave force F on the cylinder over the entire wave period can be regarded as a function of the following dimensional parameters: diameter
, wavelength
, wave height
, water depth
, density
, gravitational acceleration
, and kinematic viscosity
. Taking
,
, and
as fundamental parameters, it can be obtained that
where
is the wave number,
is the cylinder scale,
is the nondimensional wave amplitude,
is the nondimensional water depth, and
Re is the Reynolds number.
Based on the above dimensional analysis, three groups of cases under different conditions were set up to study the characteristics of wave forces on wind turbine foundations within common scale ranges. Group A cases focus on the force characteristics of cylinders in the transition interval of cylinder scale
from 0.1 to 0.2, with a total of 18 cases, including 9 deep-water conditions (marked with ○) and 9 finite water depth conditions (marked with △). The wave parameters are set as shown in
Table 4.
The Group B cases are the same as those used in
Section 4.1. Under the same wave field conditions, by changing the cylinder diameter, the force characteristics of cylindrical foundations with different diameters in the same wave field are obtained. The Group C cases refer to the wave parameters and water depth conditions of the sea area where the first-phase project of the Nanri Island Offshore Wind Farm in Putian, Fujian is located. Taking a cylinder diameter
and water depth
, the period T uniformly transitions in the range of 2.5~13.5 s, the wave height ranges from 0.5 m to the maximum design wave height (taking the wave height with a cumulative frequency of
), and the range of
is in the range of 0.047~0.63. The specific parameters are shown in
Figure 16.
This study focuses on the variation laws of horizontal wave forces within the range of under different water depths and wave heights. This not only helps better understand and predict the changes in wave forces within this range but also provides an important reference for the design of offshore wind turbine foundation structures and pile structures.
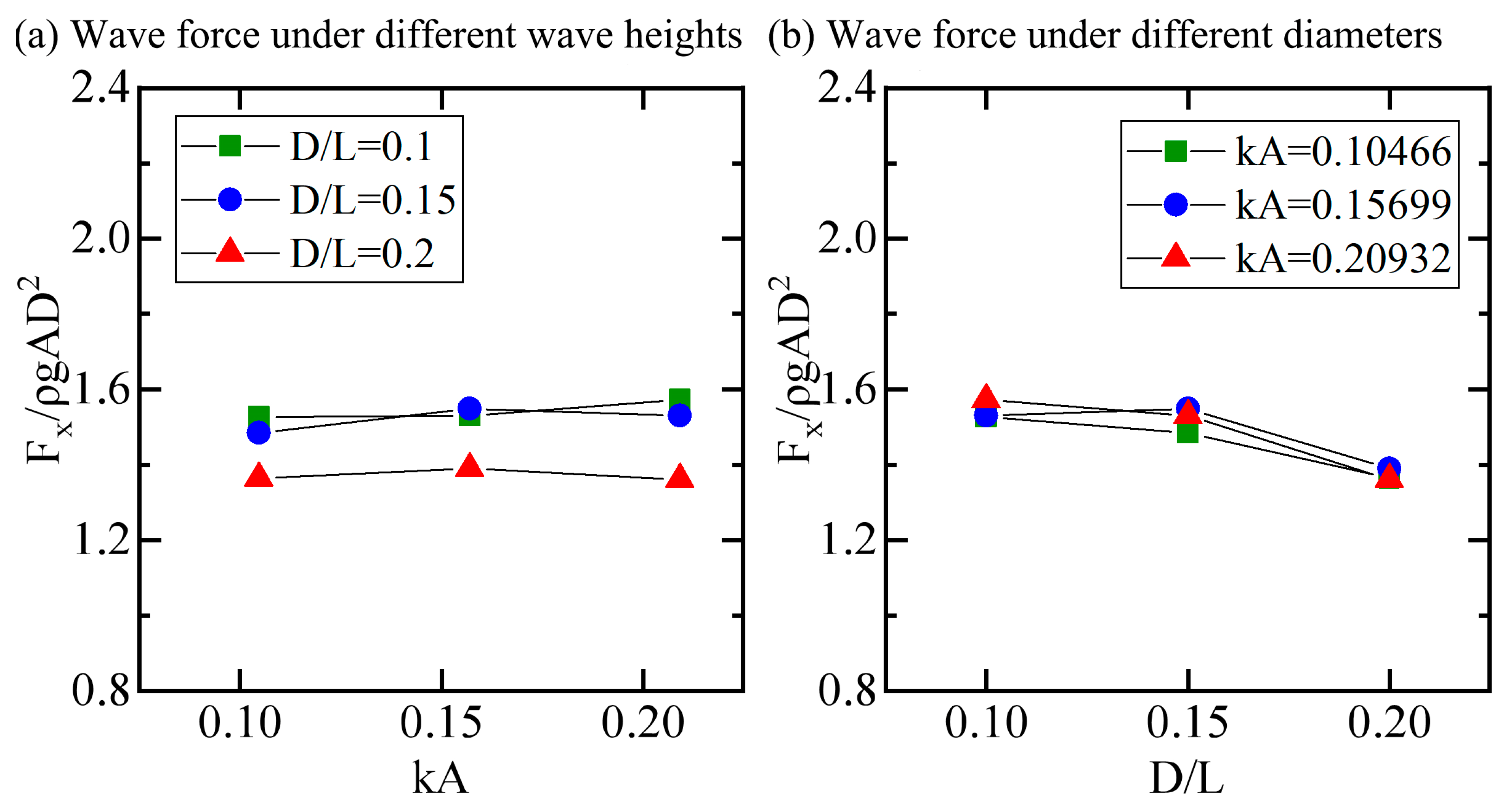
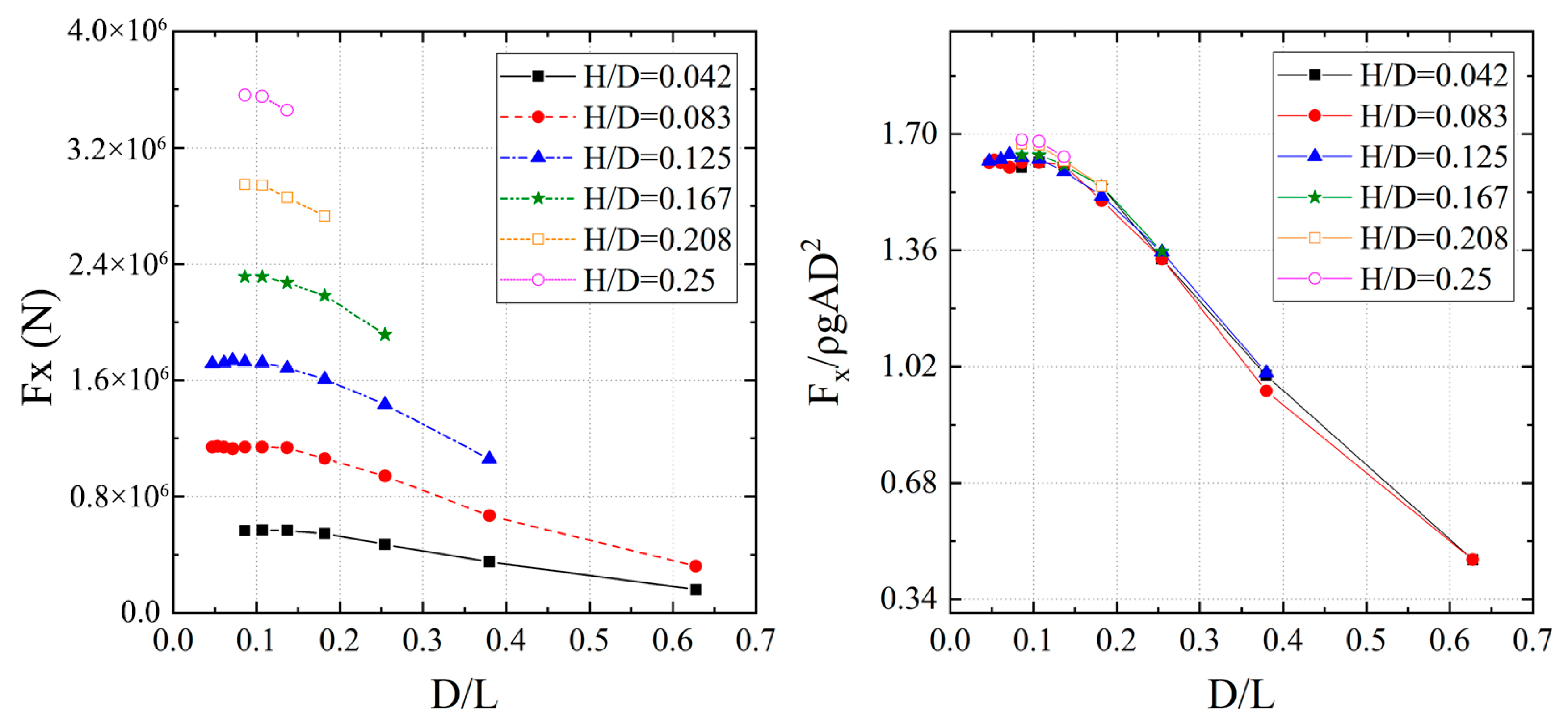
The calculation results of horizontal along-current wave forces are nondimensionalized, and the results for each case under finite water depth conditions are shown in
Figure 17a, which presents the force results on the cylinder under different wave heights. It can be seen that as the nondimensional wave amplitude increases, the nondimensional horizontal wave forces at
and
show a slow increasing trend. At
, the nondimensional horizontal wave force on the cylinder is the smallest.
Figure 17b shows the variation in horizontal wave forces on cylinders with different diameters. As the cylinder diameter increases, the nondimensional horizontal wave force gradually decreases, and the wave height conditions have little influence on the nondimensional horizontal wave force.
As shown in
Figure 18, the calculation results of nondimensional wave forces under deep-water conditions for different wave heights and cylinder diameters are presented. Overall, compared with the finite water depth cases, the overall variation trends of the two are basically consistent. In
Figure 18a, as the nondimensional wave amplitude increases,
and
always exhibit an upward trend. Only at
does the nondimensional wave force show a downward trend. In
Figure 18b, compared with the horizontal wave forces under finite water depth conditions, the influence of wave height on the nondimensional wave force is most significant at
.
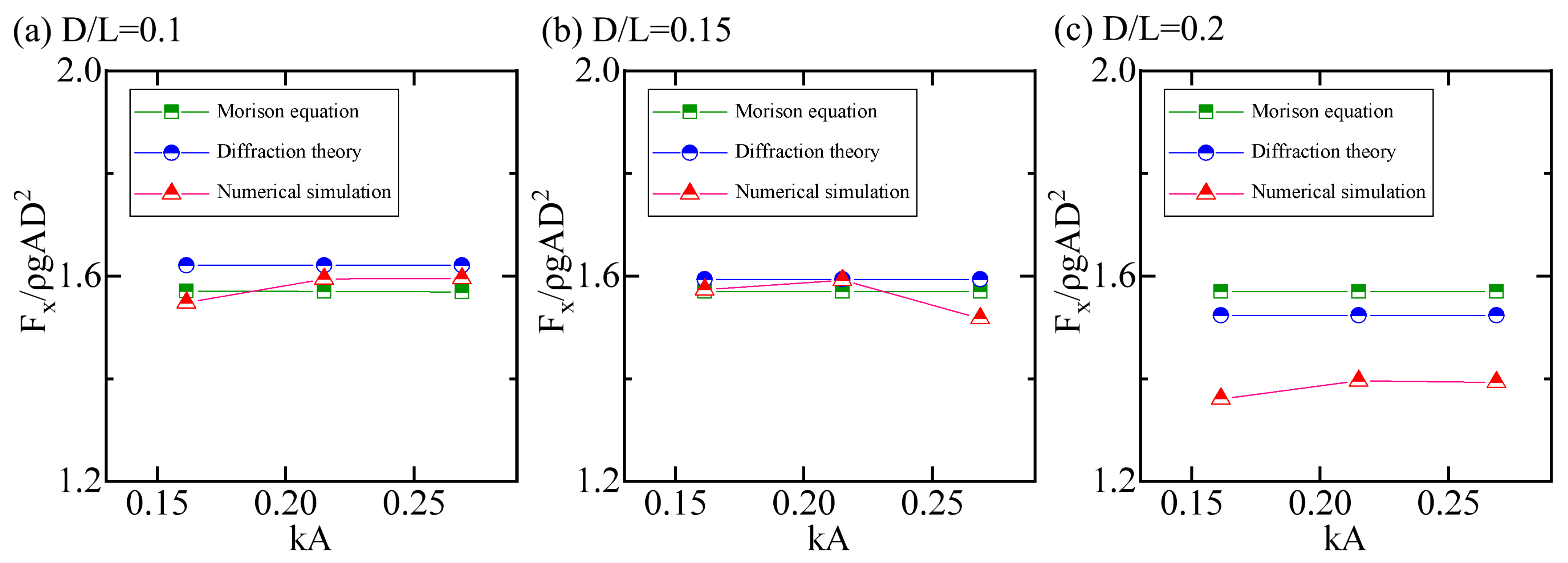
To further investigate the differences between the numerical simulation results and the results calculated by empirical formulas in engineering codes, two methods were employed: Morison’s equation for calculating wave forces on small-diameter cylinders and the diffraction theory for large-diameter cylinders. Detailed calculations of horizontal wave forces on vertical cylinders were conducted for these cases using both methods. The maximum horizontal wave forces obtained from Morison’s equation, linear diffraction theory in codes, and numerical simulations were compared to analyze the differences among the three sets of results. The comparisons of horizontal wave forces under finite water depth and deep-water conditions are shown in
Figure 19 and
Figure 20, respectively.
As can be seen from
Figure 19 and
Figure 20, the results from Morison’s equation and diffraction theory do not change with
. The wave forces calculated using Morison’s equation hardly change with the cylinder diameter, while the maximum wave forces calculated using diffraction theory gradually decrease as the cylinder diameter increases. However, comparisons with numerical simulation results show that the results from Morison’s equation and diffraction theory are only accurate when
and
. Morison’s equation provides more accurate estimates at
, and there is little difference between the two wave force estimation methods at
, with errors within 5%. Only slight deviations in the nondimensionalized maximum wave force occur due to changes in wave height. However, serious deviations occur when
, where both empirical formulas overestimate the horizontal wave forces by more than 10%, indicating that using Morison’s equation to calculate wave loads is no longer applicable. This may be due to the disturbance caused by the cylinder in the wave field, which reduces the nondimensional inertial force on the cylinder. Therefore, it is necessary to modify the diffraction theory.
In wave motion, due to the reciprocating motion of water particles in the flow, the wave forces on the cylindrical structure are also reciprocating, i.e., positive and negative. The force exerted by waves on structures in the same direction as wave propagation is defined as the positive wave force, occurring when water particle motion aligns with the wave propagation direction. After wave passage, water retreat or the formation of a low-pressure zone behind the structure causes water particles to move opposite to the wave propagation direction, whereby the force exerted by waves on the structure in the opposite direction to wave propagation is termed the negative wave force. As shown in
Figure 21, the curves depict the variation in the maximum positive and negative horizontal wave forces on the cylindrical structure with the cylinder scale. It can be seen that the maximum positive and negative horizontal wave forces on the cylindrical structure exhibit basically the same trend. Except for
and
, the negative horizontal wave forces are slightly higher than the positive ones, with a difference of 4–5%, which may be caused by the nonlinear effects of waves. At the boundary point of cylinder size between
and
, the growth rate of horizontal wave forces on the cylinder significantly accelerates, which is basically consistent with the results derived from linear diffraction theory.
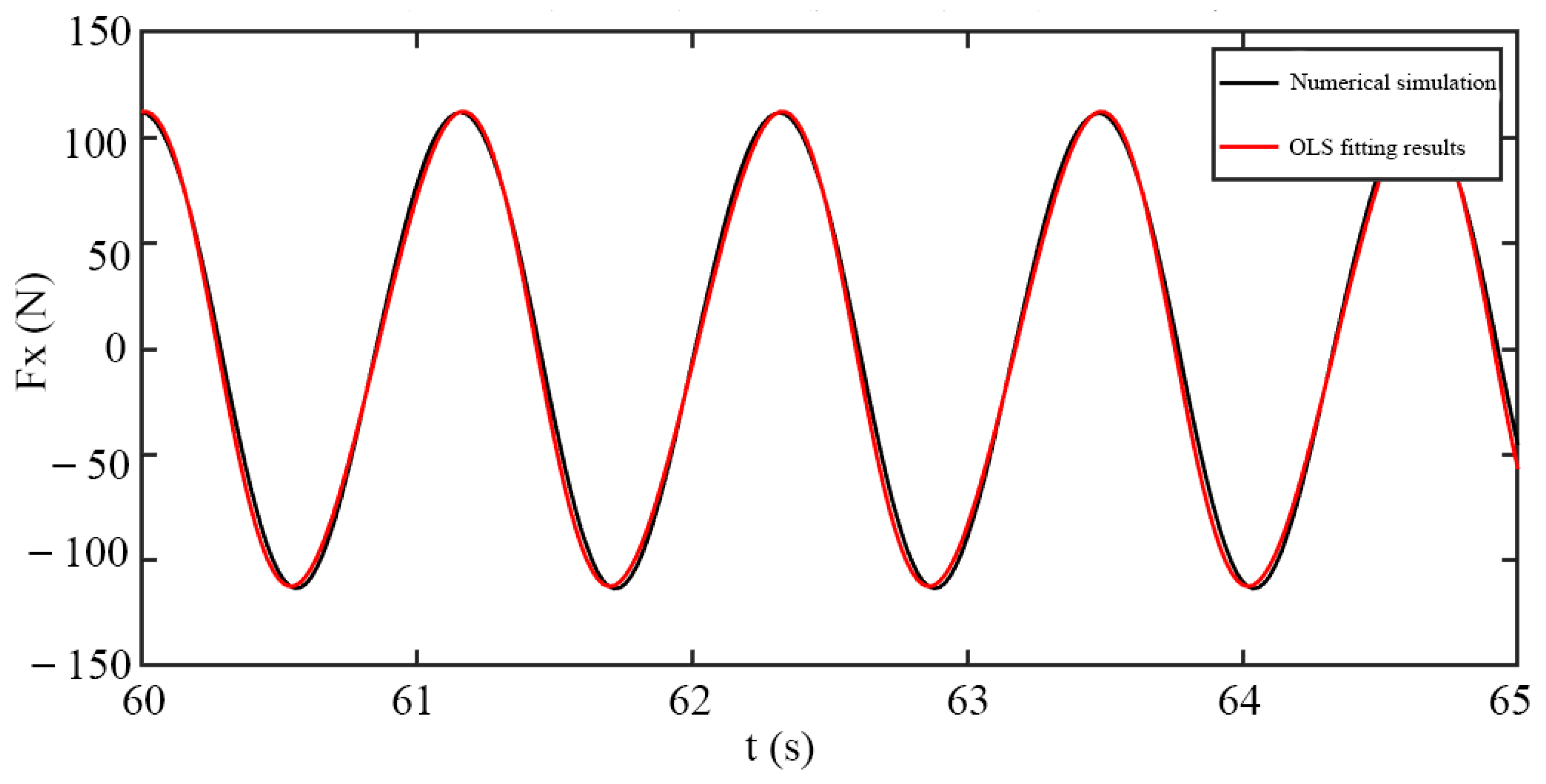
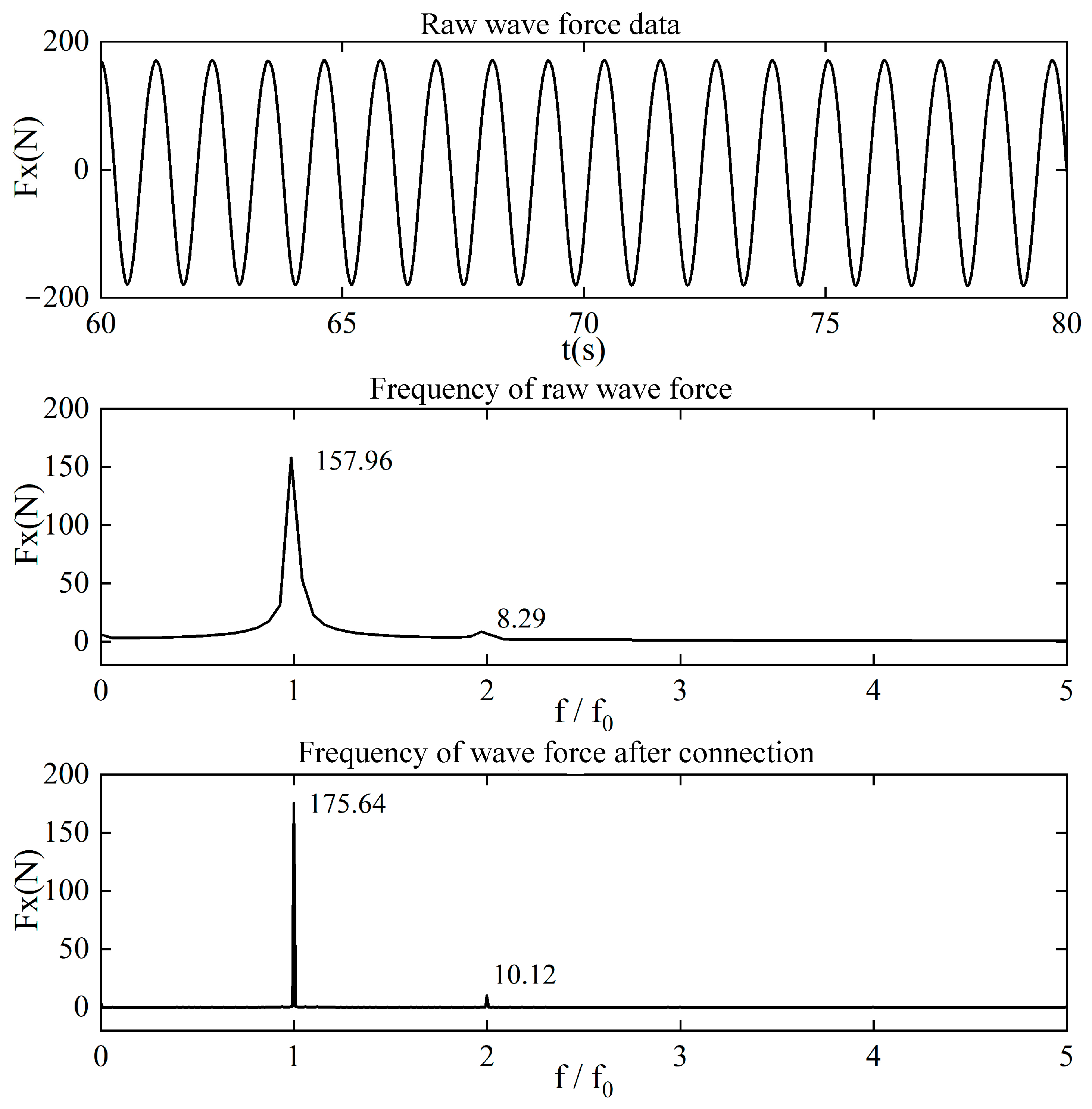
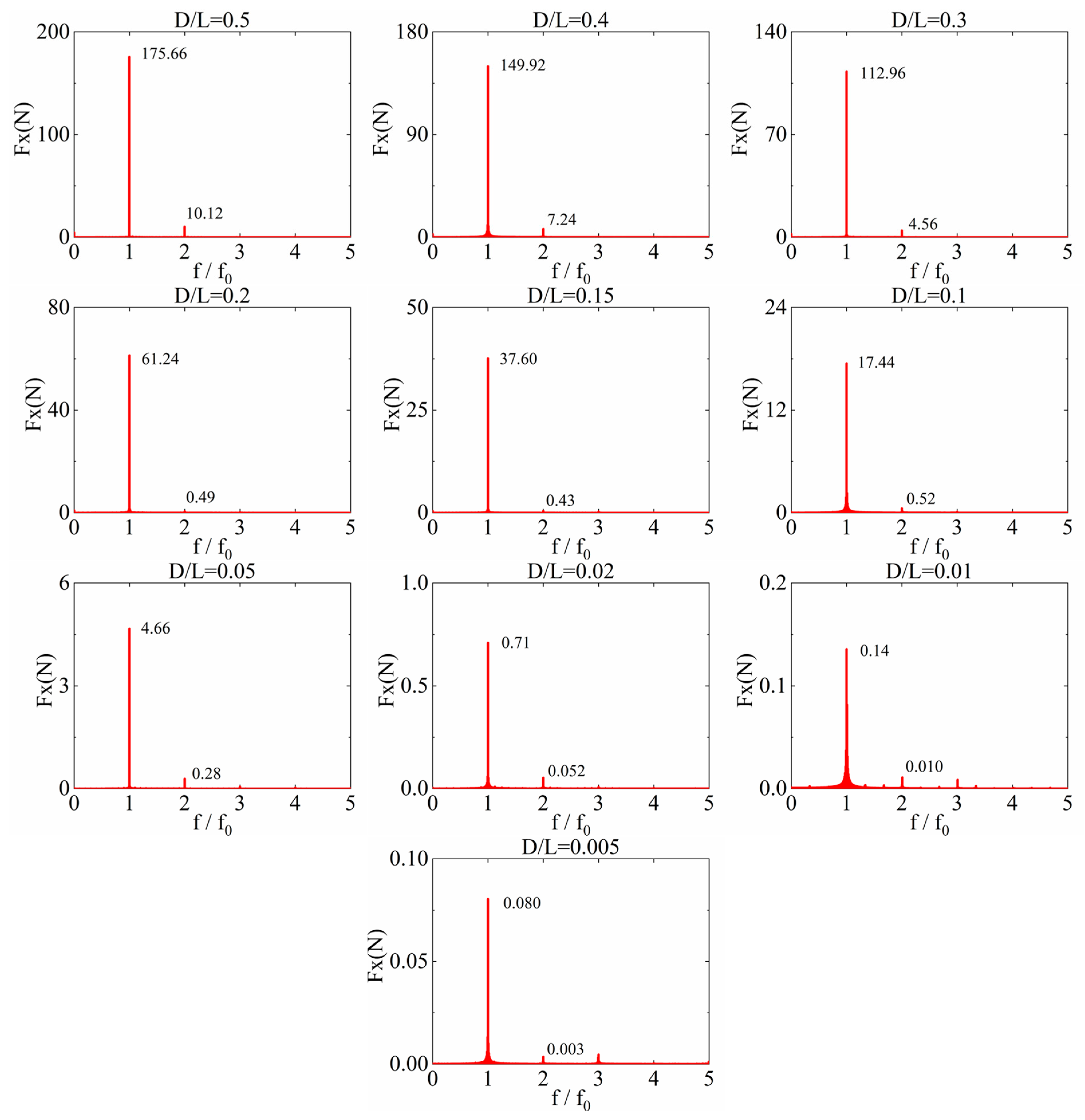
By concatenating 12 stable periods for each case and performing FFT (Fast Fourier Transform) analysis, the frequencies and amplitudes of each order of forces on cylindrical structures with different diameters are obtained. After filtering the first and second harmonic forces for each case, the force distributions at different frequencies for cylindrical structures of various scales are shown in
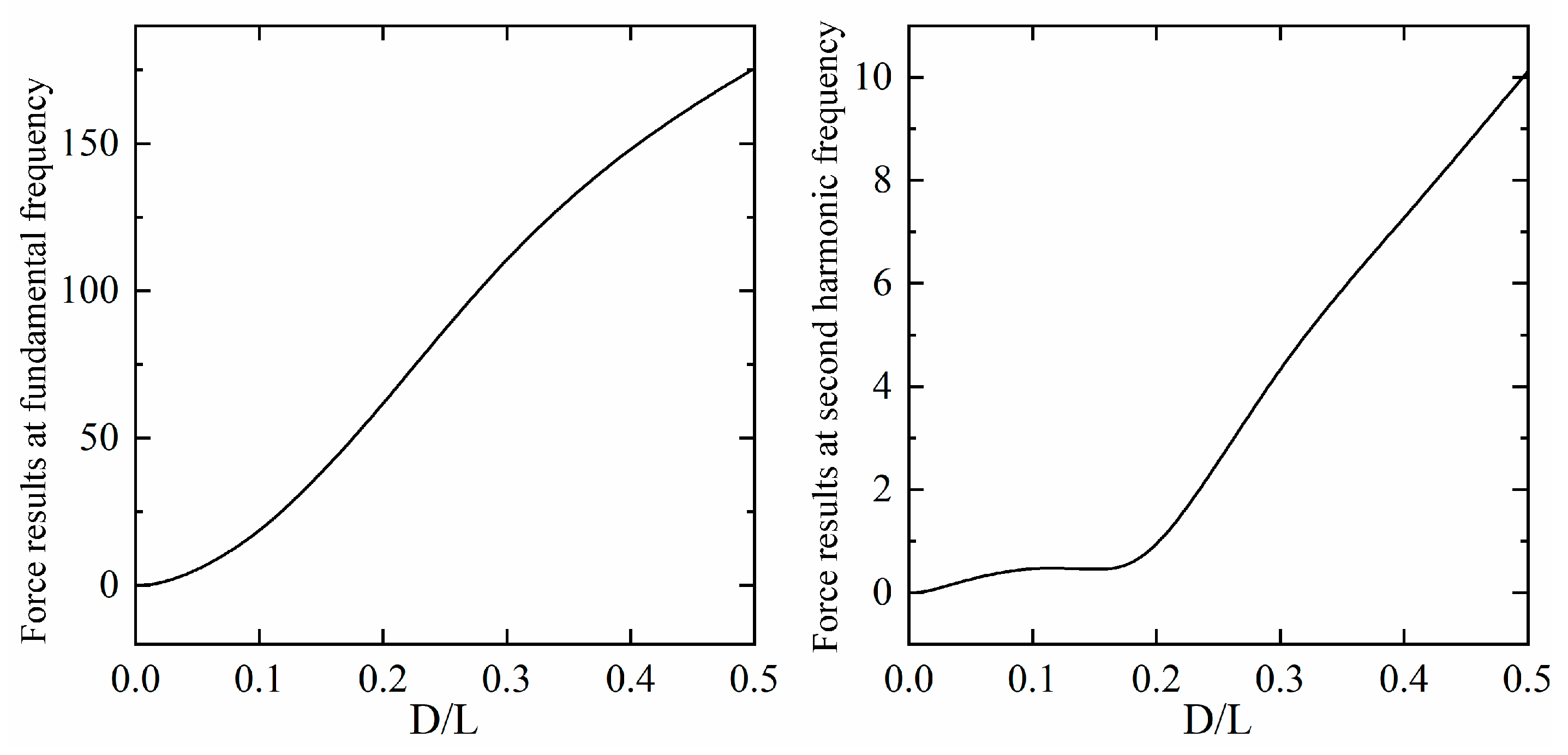
Figure 22. As can be seen from the figure, as the cylinder diameter increases, the forces at both the first and second harmonic frequencies gradually increase.
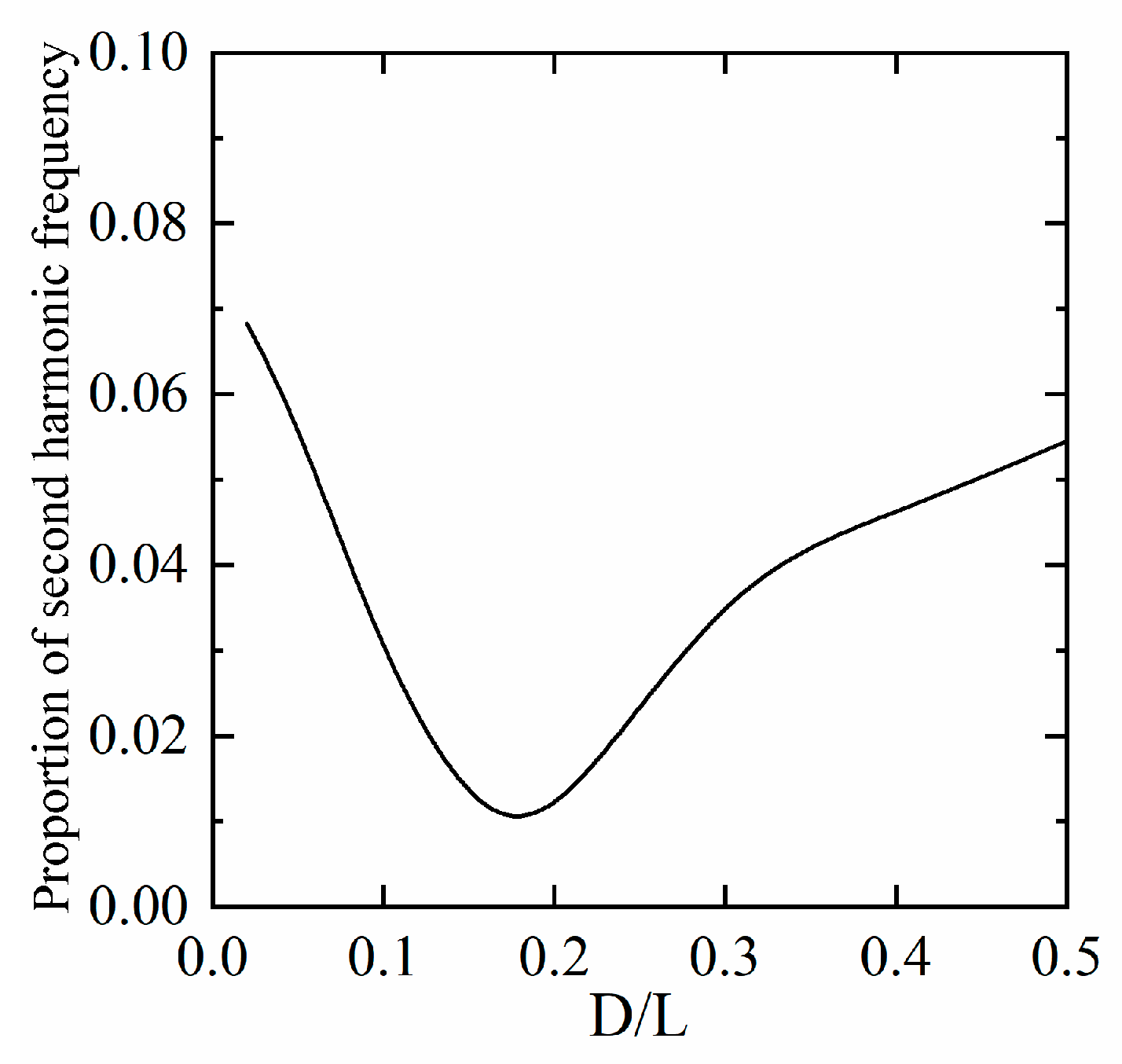
Figure 23 and
Figure 24 show the variation curve of the proportion of the second harmonic force on the wind turbine foundation with the cylinder scale. As can be seen from the figure, as the cylinder scale increases, the horizontal wave force at the second harmonic frequency on the structure exhibits a horizontal phase in the transition region between 0.1 and 0.2, indicating that within this transition region, the nonlinear effects of the horizontal wave loads on the wind turbine foundation remain constant as the cylinder scale increases. The proportion of nonlinear horizontal wave loads is minimized near
.
In large-diameter cases, the inertial force coefficient dominates the influence on wave forces, while nonlinear effects enhance the diffraction effect. The
value obtained by fitting with diffraction theory using the least squares method is more accurate than that from Morison’s equation using the same fitting method. As shown in
Figure 25, the
results are obtained by fitting wave forces on cylinders of different diameters with Morison’s equation for
and with linear diffraction theory for
. It can be seen from the figure that as the cylinder diameter increases, the inertial force coefficient
gradually decreases, showing some similarity to the
values given by linear diffraction theory. When
, fitting cylinder wave forces with Morison’s equation using the least squares method yields a viscous force coefficient
of approximately 1.35. During the fitting process with Morison’s equation, it is found that for
, the value of the viscous force coefficient
has little effect on wave forces, with only
playing a role in the fitting. This indicates that within the range of
, the viscous forces generated by waves are very small and their proportion in the total force can be ignored. According to Sarpkaya’s [
19] recommendation,
is used for calculations.
4.4. Force Characteristics of Cylinder Under Real Sea Conditions
In the Group C experimental cases, referring to the wave parameters and water depth conditions of the sea area where the first-phase project of the Nanri Island Offshore Wind Farm in Putian, Fujian is located, the maximum horizontal wave force on a wind turbine foundation with a diameter
in the wave field under the set wave conditions is shown in
Figure 26. As can be seen from the figure, under the same wave height condition, as the wavelength increases, the horizontal wave load on the structure slowly increases. When
, the variation range of the maximum horizontal wave force on the wind turbine foundation is small and basically remains stable. It can be seen from the left figure that the wave height H is a key factor affecting the maximum horizontal wave force on the wind turbine foundation. The right figure shows the result of nondimensionalizing the maximum horizontal wave force, from which it can be seen that the variation trend of the nondimensionalized wave force remains basically consistent. The maximum wave force increases rapidly with the wave height, and this is more evident at larger wavelengths, indicating that the inertial force generated by waves increases with the wave height.
As shown in
Figure 27, the variation law of the inertial force coefficient
with
under different wave heights is presented. The
results are also obtained by fitting wave forces with Morison’s equation for
and with linear diffraction theory for
.
During the fitting process using Morison’s equation, the viscous force component of the wave is similarly found to be very small. Therefore, it is also recommended to use for calculations in engineering applications. Additionally, it can be seen from the figure that when , the numerical values and variation patterns of basically tend to be consistent. When , as decreases, the influence of wave height on the value of gradually increases. In this interval, the diffraction effect gradually weakens, and inertial forces dominate.
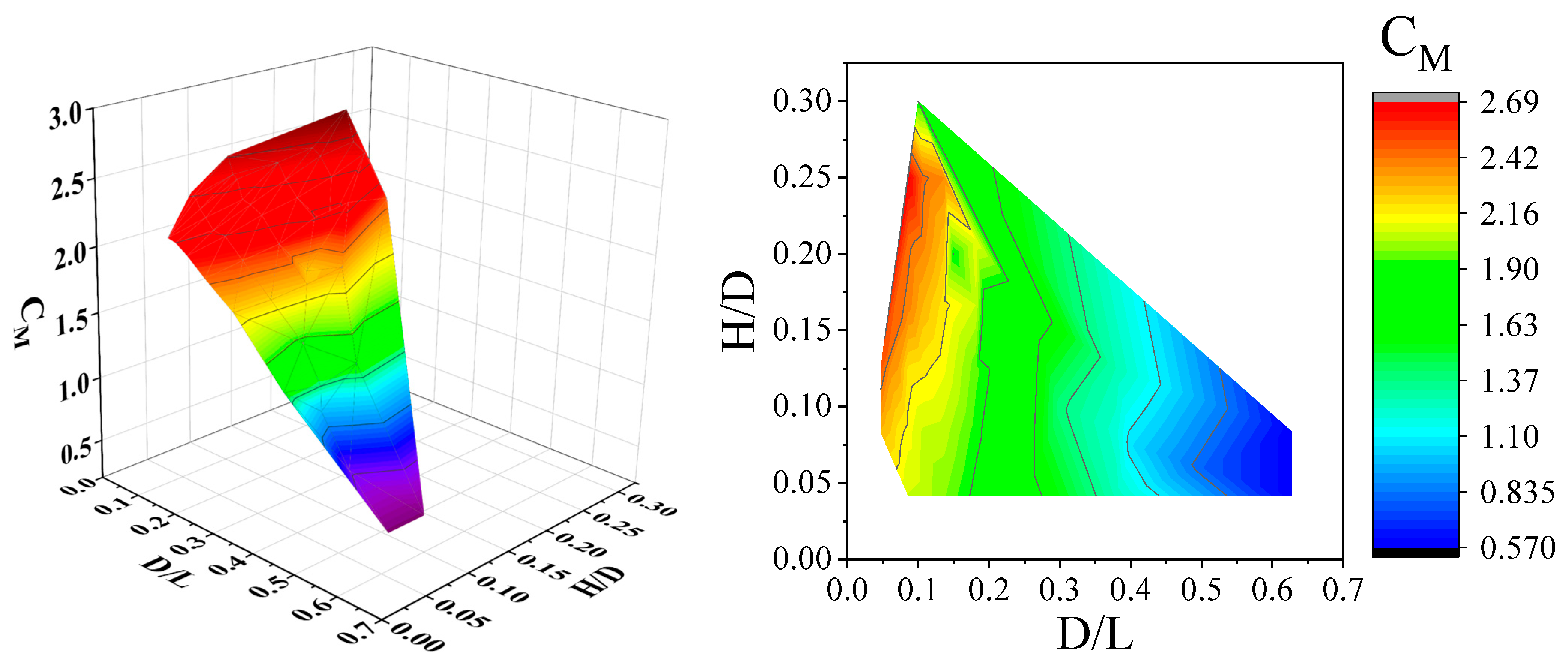
To simplify the calculation process, empirical formulas hold an important position in engineering calculations. Equation (33) defines the boundary between large-diameter and small-diameter cylinders as 0.1 by organizing hydrodynamic coefficients, and the values of
and
are redefined using wave forces obtained from numerical simulations and applied as a revised formula. Here, the value of
is taken as 0.62, and the recommended value of
is shown in
Figure 28.
where
,
Figure 28 displays a recommended value contour plot of the wave inertial force coefficient
based on Morison’s equation and linear diffraction theory, under the target water area conditions where the relative water depth
ranges from 0.047 to 0.63 and the relative wave height
ranges from 0.05 to 0.3. By referring to this figure and combining it with the differences in specific environmental parameters, the value of the coefficient
can be determined more accurately.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}