

A New Inversion Method for Obtaining Underwater Spatial Information of Subsidence Waterlogging Based on InSAR Technology and Subsidence Prediction

 , and
, and
Abstract
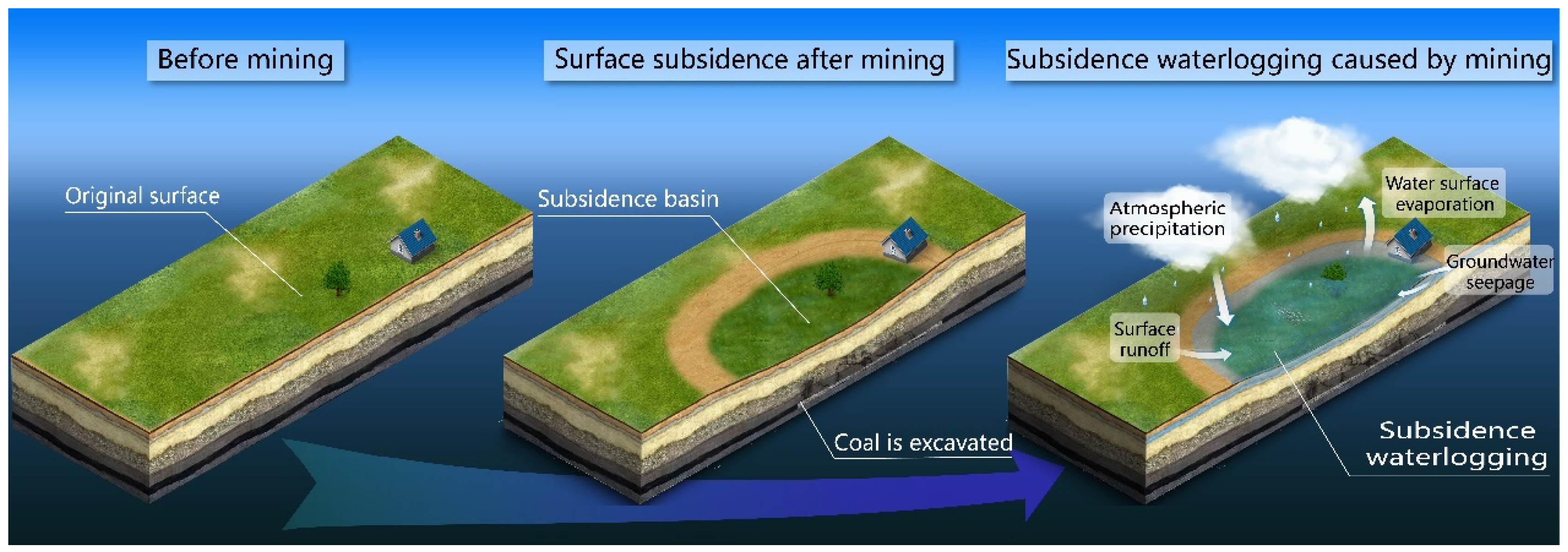
1. Introduction
2. Overview of Study Area and Data Sources
2.1. Overview of Study Area
2.2. Data Sources
2.2.1. Radar Monitoring Data
2.2.2. Actual Measurement Data
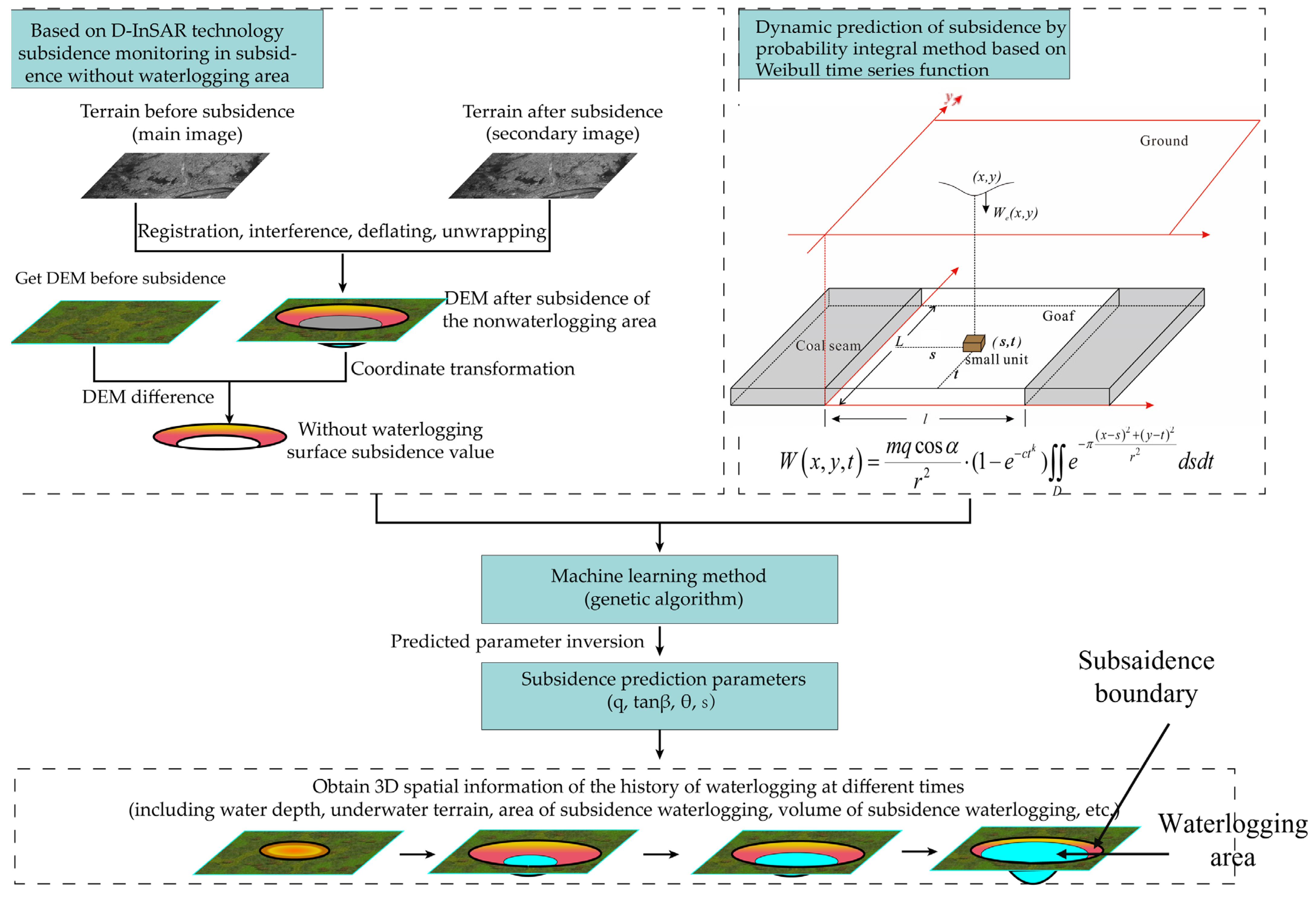
3. Inversion Method of the Underwater Spatial Information of Subsidence Waterlogging
3.1. Subsidence Extraction in Nonwaterlogging Areas
3.2. Boundary Extraction of Waterlogging in the Subsidence Area
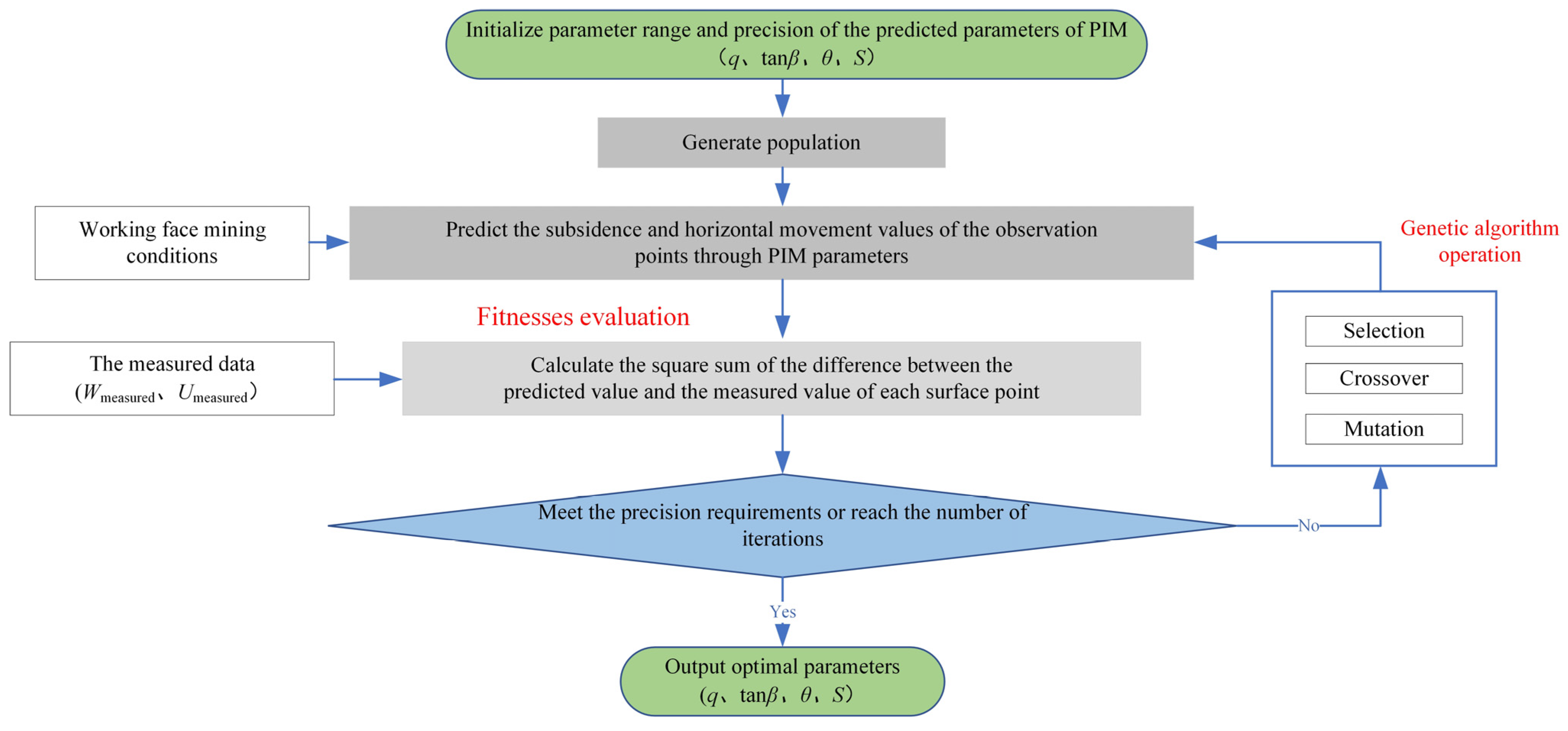
3.3. PIM Parameters Inversion Method Based on GA
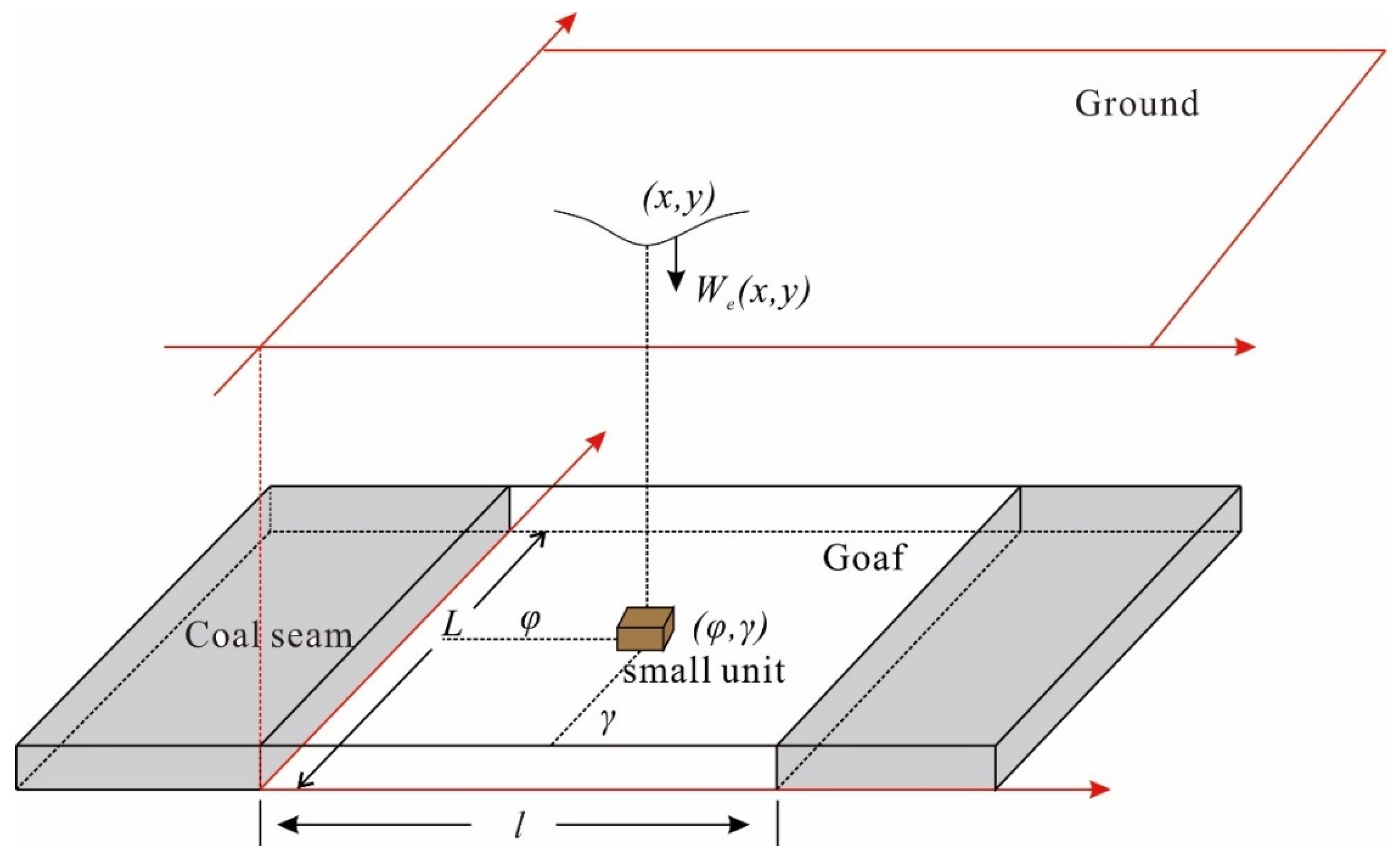
3.3.1. Brief Review of PIM Theory
3.3.2. Theory of GA
3.3.3. Basic Steps of PIM Parameter Inversion Based on GA
- (1)
- The monitoring data are compared with the expected data, the fitness function is used to determine whether the parameters meet the adaptability requirements, and the probability of being selected is calculated, as expressed in Equation (6):
- (2)
- Judge whether the fitness values of these individuals meet the precision requirements or reach the number of iterations. If the fitness value of the individual meets the optimization criterion or the number of iterations reaches the iteration threshold, the individual is retained and output as the final optimal parameter, and this method ends. If the fitness value of the individual does not meet the criterion, step (7) will be performed, and the next iteration will begin.
- (3)
- GA operation is generally divided into three steps, including selection, crossover, and mutation. In the selection step, individuals with high fitness values will have a greater probability of generating individuals for the next generation, while individuals with low fitness values may be eliminated. In the crossover step, a new generation based on a certain crossover probability and crossover method will be generated. In the mutation step, parts of chromosomes are mutated with a small probability to generate new offspring individuals. When the GA operation is completed, the process jumps to step (3). The whole program is completed upon reaching step (6).
3.4. Calculation of the Underwater Spatial Information of Subsidence Waterlogging
4. Results
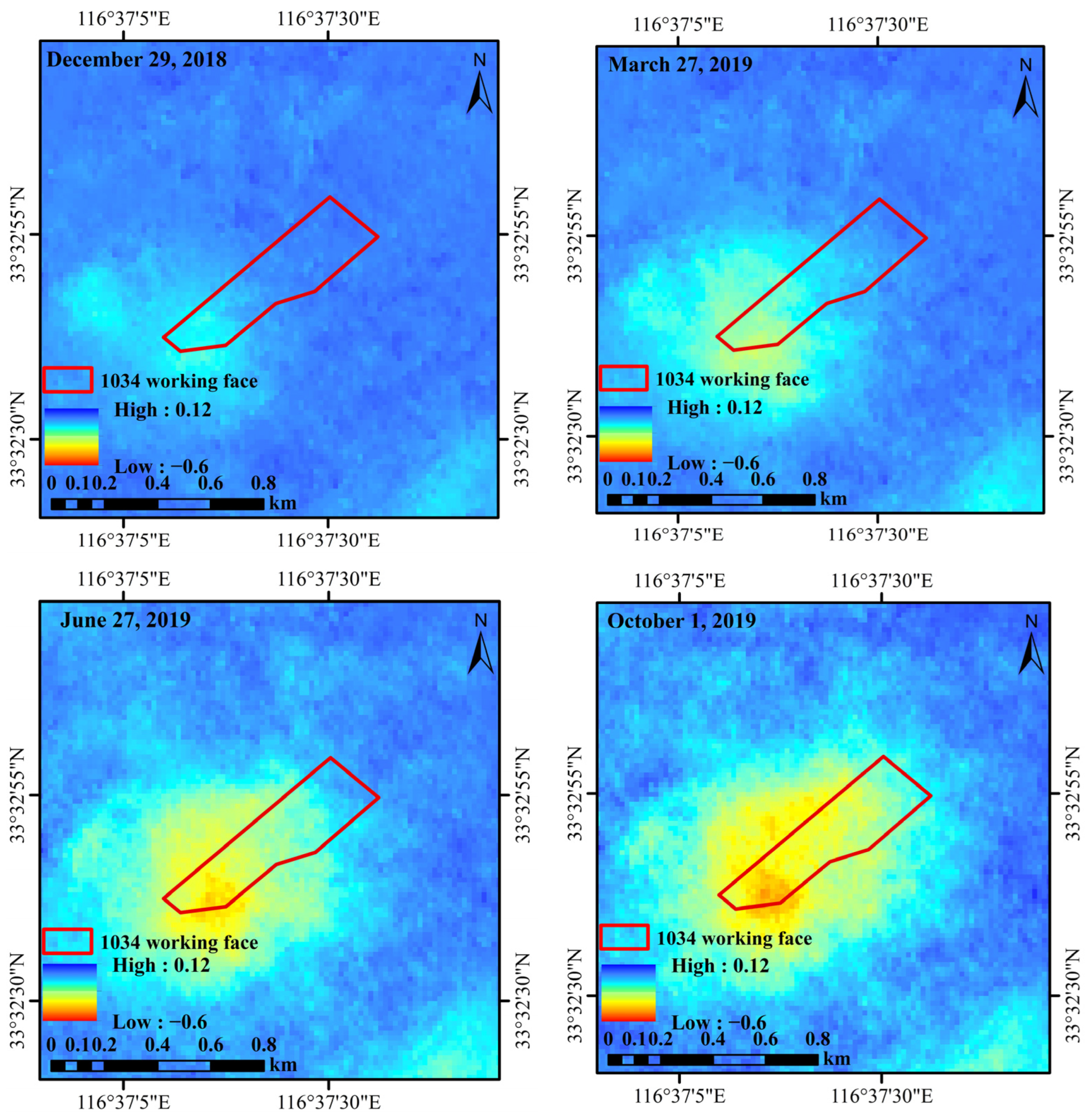
- (1)
- Differential interference processing of the radar data from 24 September 2018 to 8 August 2020 is performed to obtain the subsidence value during different periods and determine the final subsidence value of the working face through continuous superposition. The subsidence results for 29 December 2018, 27 March 2019, 27 June 2019, 1 October 2019, 17 January 2020, and 4 May 2020 are obtained. The research results for the working face of the mining area are superimposed, as shown in Figure 9.
- (2)
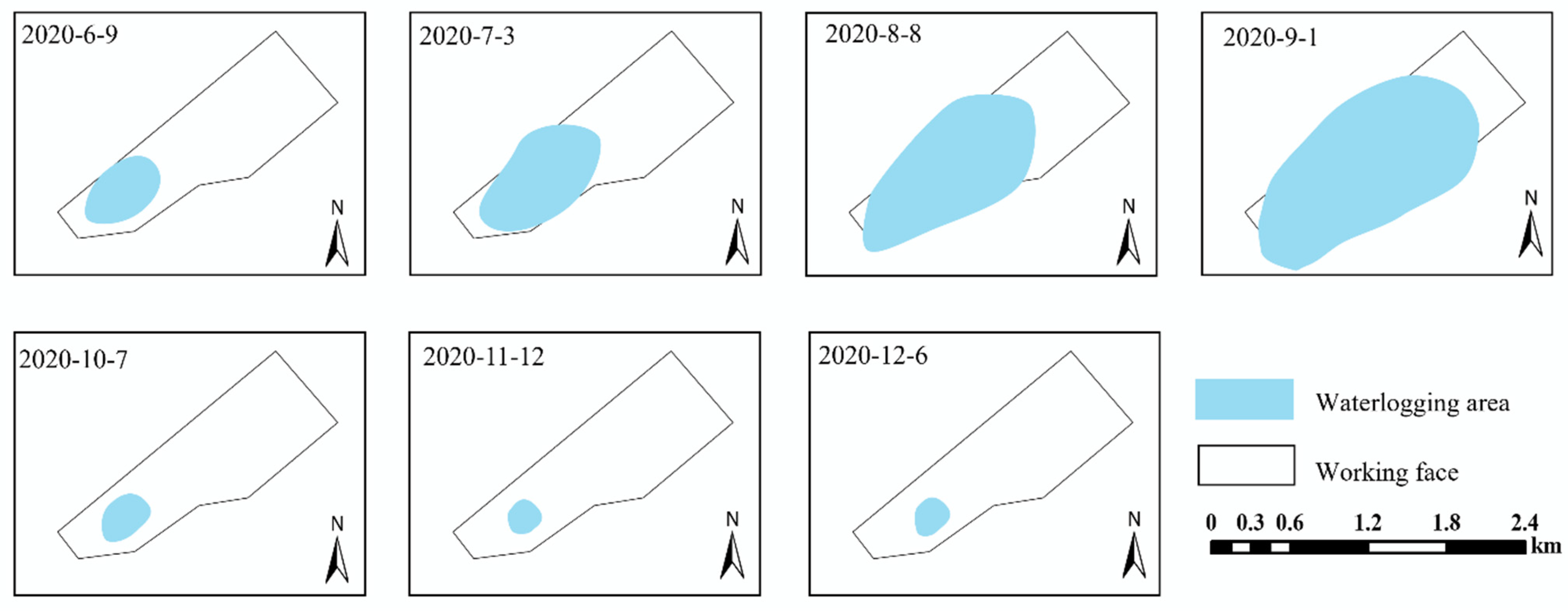
- By observing the satellite image data, the corresponding waterlogging is determined, and the threshold method is used to extract the waterlogging range of the working face. Then, the subsidence in the mining area and the range of waterlogging during this period are superimposed to obtain the boundary subsidence of the coal mining subsidence waterlogging area. The observations revealed that the working face began to gradually experience waterlogging in June 2020, as shown in Figure 10.
- (3)
- According to the boundary subsidence information of the coal mining subsidence waterlogging area obtained by differential interferometric radar technology, the parameters of the PIM are inverted by GA, and the parameter model of the working face is generated. Since the actual measurement data were collected on 16 August 2020, according to the actual measurement data, the subsidence monitoring data on 8 August 2020 were selected for the experiment. Among them, the maximum number of iterations was set to 100, the initial population was less than 100, the crossover probability was 0.4, and the mutation probability was 0.001. Through continuous iterative calculation, the main parameter information was finally inverted, as listed in Table 4.
- (4)
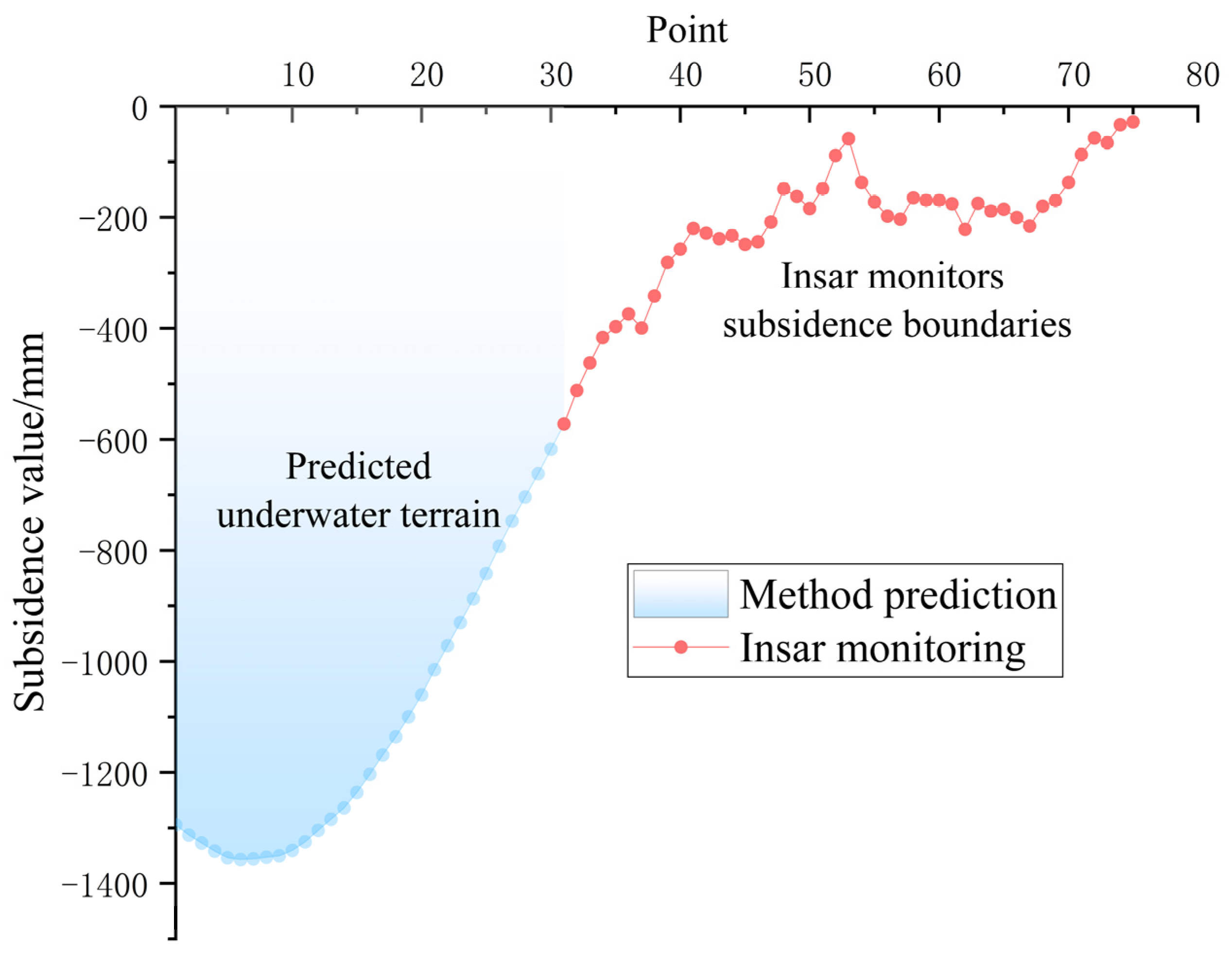
- Combined with the parameter information inverted in the third step, the underwater spatial information of the 1034 working face on 8 August 2020 was predicted using the dynamic prediction system of the underwater spatial information of the subsidence waterlogging area, as shown in Figure 11.
5. Discussion
5.1. Accuracy Analysis
5.1.1. Measurement Comparative Analysis
5.1.2. Comparison Analysis of Traditional Method
5.2. Comparison of Subsidence in Different Periods after Stable Subsidence
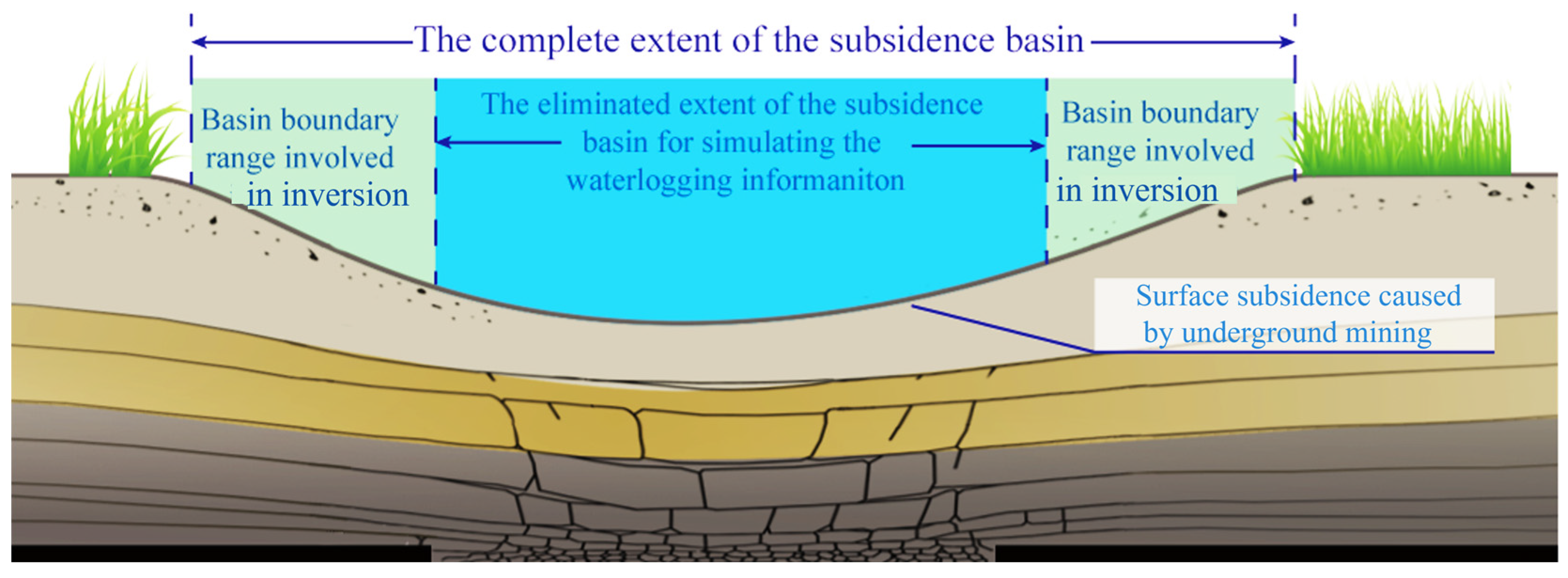
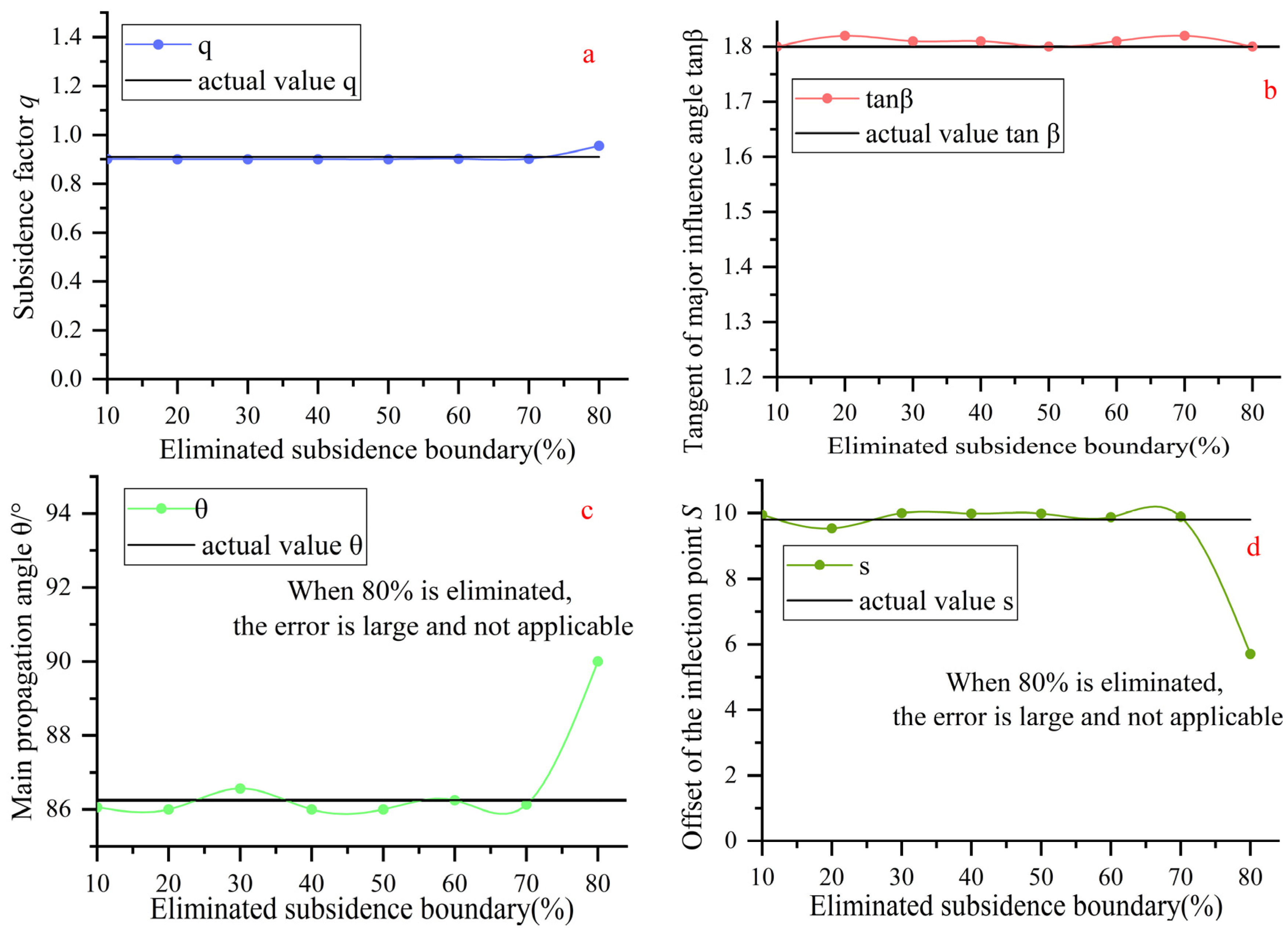
5.3. Predicted Parameters Are Inversed with Different Degrees of Subsidence Boundaries
5.3.1. Experimental Method
5.3.2. Experimental Results
5.4. Evolution Process of Underwater Spatial Information
- (1)
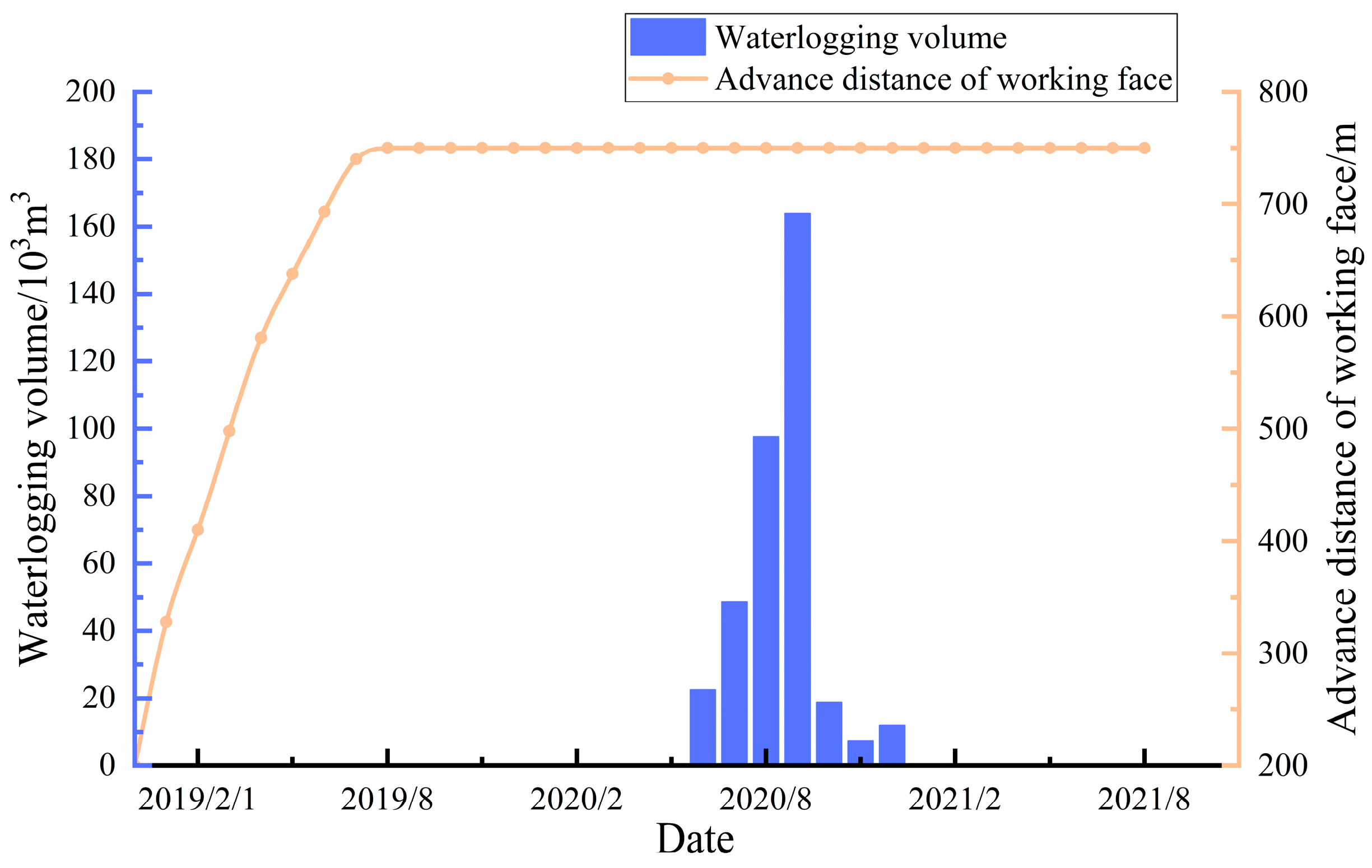
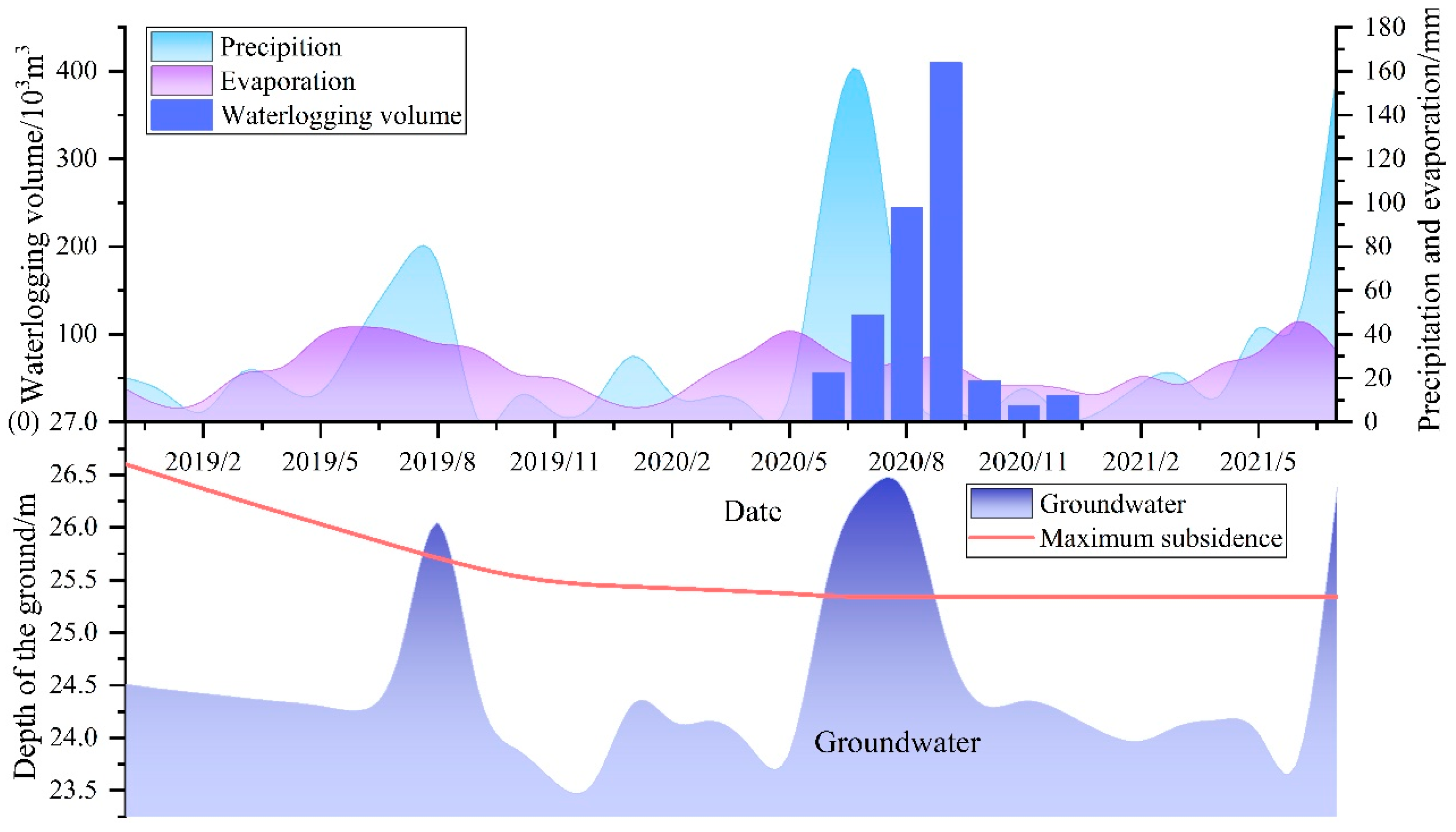
- Unformed stage of waterlogging: Nonwaterlogging occurred in the working face from September 2018 to 4 May 2020. The working face in the research area advanced 748 m from mining (September 2018) to production termination (August 2019). At this time, with the continued advancement of the working face, the subsidence basin continued to sink until the volume of the subsidence area was 145,025 m³ in October 2019. With the shutdown of working face mining, the subsidence area gradually entered the stage of residual subsidence. At this time, the working face no longer advanced, and the subsidence basin slowly subsided. By June 9, 2020, it had basically remained stable at 1355 mm, and the volume of the subsidence area gradually reached a maximum value of 189,715 m³. The above figure shows that when the working face continued to advance and the coal mining subsidence area was not fully mined, no waterlogging occurred.
- (2)
- Growth stage of waterlogging: In June 2020, waterlogging was gradually generated. Over time, the amount of waterlogging continued to increase, and the rate of increase gradually increased. By September 2020, the volume of water in the working area reached a maximum of 163,826 m3, water in the working area gradually decreased, and by January 2021, no waterlogging occurred. Moreover, in December 2020, there was a small peak in the volume of waterlogging, at 12,012 m3. During this period, the subsidence of the working face basically remained stable, the variation range of the maximum subsidence value was small, and the volume of the subsidence basin basically remained unchanged at approximately 190,000 m3. Waterlogging locally occurred in June, and the largest extent of waterlogging occurred in September. According to the local monsoon climate, there are frequent plum rains in June and seasonal precipitation in July and August. Accordingly, it is speculated that precipitation may be the main cause of ponding.
- (3)
- Seasonal fluctuation stage of waterlogging: From January 2021 to July 2021, nonwaterlogging occurred on the working face in the subsidence area. From the above-ground detection radar data, it was determined that the surface condition of the working face changed over time, and the working face was mostly bare ground or vegetation-covered land.
5.5. Analysis of Influencing Factors of Waterlogging Evolution
6. Conclusions and Prospects
6.1. Conclusions
- (1)
- Using InSAR technology and GA, information of the subsidence waterlogging area can be predicted, including the maximum subsidence value, water depth, waterlogging volume, waterlogging area, and volume of the subsidence area. The results showed that the maximum subsidence value on 8 August 2020 is approximately 1357 mm, the water depth is 831 mm, the height from the waterlogging surface to the ground is 526 mm, the volume of the subsidence area is 189,978 m³, and the waterlogging volume is 97,726 m³, with a waterlogging area of 107,622 m2.
- (2)
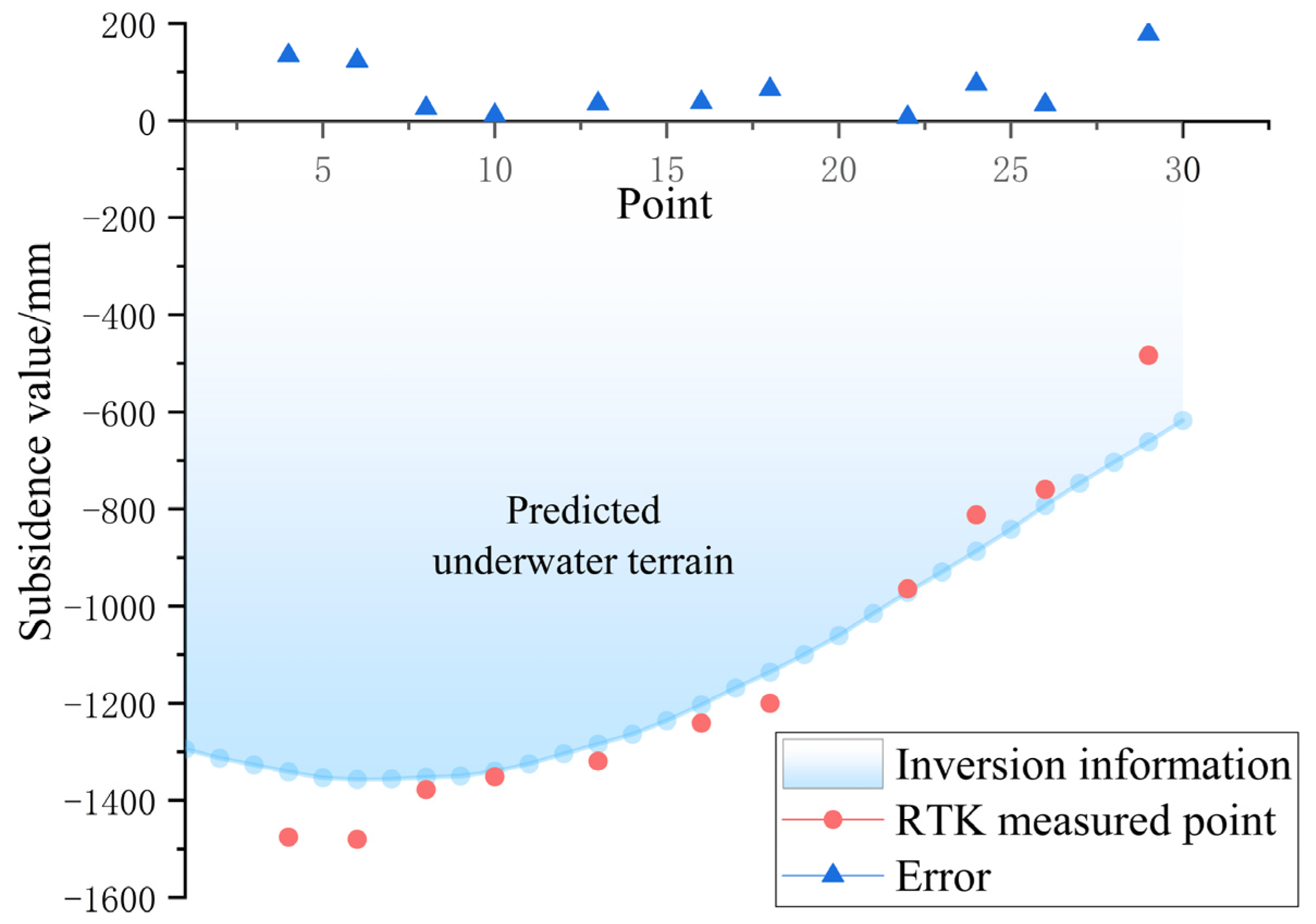
- To verify the accuracy of the proposed method, the measured data of RTK during the same period are verified and analyzed. The RMSE of water depth is 99 mm, and the relative error is 9.9%. Therefore, this inversion method is accurate and can meet the precision requirements of engineering.
- (3)
- To verify the stability of this method, a series of simulation experiments were conducted. The results show that the relative error of the maximum subsidence factor (q) remains within 5%, and the relative error of the main influencing angle tangent (tanβ) is less than 1%. Therefore, this method maintains favorable inversion stability under different boundary ranges when the waterlogging area accounts for less than 80% of the total area. When 80% of the boundary data is eliminated, the relative error of the offset of the inflection point greatly fluctuates, reaching 41.7%, while the propagation angle also fluctuates. Therefore, when the waterlogging area exceeds 80%, the inversion results of this method provide no reference value.
- (4)
- The evolution processes and influencing factors of subsidence waterlogging were analyzed. According to the waterlogging evolution data and characteristics, the waterlogging evolution process can be divided into three stages: waterlogging nonformation stage, waterlogging generation stage, and waterlogging fluctuation stage.
6.2. Prospects
- (1)
- The differential interferometer radar used for mining boundary extraction in this paper is based on two-dimensional surface extraction. The boundary subsidence can be further extracted from three horizontal directions, such as east–west, north–south and subsidence, by means of LOS resolution analysis, so as to further optimize the differential interference results.
- (2)
- In the process of inverting underwater terrain, a genetic algorithm based on the probability integral method was used in this paper, which is mainly aimed at spatial changes in the subsidence process of coal mining subsidence areas. In further studies, the influence of the time factor in the deformation process of the mining area could be considered, and the methods of spatio-temporal fusion, such as the introduction of the Knothe time function, could be used to further invert the underwater terrain and refine the inversion results.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dudley, B. BP Statistical Review of World Energy 2022; British Petroleum Co.: London, UK, 2022. [Google Scholar]
- Guo, W.; Hu, B.; Zhang, J.; Chen, Q.; Jia, X.; Li, J. Research on the Settlement Regulation and Stability of Large Building Foundation over Gobs: A Case Study in the Xiangcheng Coal Mine, China. Shock Vib. 2021, 2021, 5533098. [Google Scholar] [CrossRef]
- Sun, R.; Zhu, X.; Zhang, P.; Liang, M.; Zhang, X.; Ning, Z.; Peng, X.; Liu, H.; Yang, X.; Huang, W.; et al. Research on the spatiotemporal evolution characteristics of waterlogging in high ground-water level coal mining subsidence areas—Taking mining areas in Anhui Province as an example. Coal Sci. Technol. 2020, 50, 215–224. [Google Scholar]
- Brücker, C.; Preuße, A. The future of underground spatial planning and the resulting potential risks from the point of view of mining subsidence engineering. Int. J. Min. Sci. Technol. 2020, 30, 93–98. [Google Scholar] [CrossRef]
- Grzovic, M.; Ghulam, A. Evaluation of land subsidence from underground coal mining using TimeSAR (SBAS and PSI) in Springfield, Illinois, USA. Nat. Hazards 2015, 79, 1739–1751. [Google Scholar] [CrossRef]
- Lechner, A.M.; Baumgartl, T.; Matthew, P.; Glenn, V. The impact of underground longwall mining on prime agricultural land: A review and research agenda. Land Degrad. Dev. 2016, 27, 1650–1663. [Google Scholar] [CrossRef]
- Cheng, L.; Skousen, J.G. Comparison of international mine reclamation bonding systems with recommendations for China. Int. J. Coal Sci. Technol. 2017, 4, 67–79. [Google Scholar] [CrossRef]
- Zhang, L. Big data, knowledge mapping for sustainable development A water quality index case study. Emerg. Sci. J. 2019, 3, 249–254. [Google Scholar] [CrossRef]
- Morrison, K.G.; Reynolds, J.K.; Wright, I.A. Subsidence fracturing of stream channel from longwall coal mining causing upwelling saline groundwater and metalenriched contamination of surface waterway. Water Air Soil Pollut. 2019, 230, 37. [Google Scholar] [CrossRef]
- Li, B.; Zhang, C.; Chen, Y. Research on the construction method of underwater terrain in coal mining subsidence area based on intelligent unmanned ship technology and GIS. China Coal 2020, 46, 28–35. [Google Scholar]
- Zhu, X.; Ning, Z.; Cheng, H.; Zhang, P.; Sun, R.; Yang, X.; Liu, H. A novel calculation method of subsidence waterlogging spatial information based on remote sensing techniques and surface subsidence prediction. J. Clean. Prod. 2022, 335, 130366. [Google Scholar] [CrossRef]
- Fan, J.; Zuo, X.; Li, T.; Chen, Q. Comparative analysis of PS-InSAR and SBAS-InSAR technology on land subsidence monitoring in main urban area of Kunming. Surv. Mapp. Eng. 2018, 27, 50–58. [Google Scholar]
- Zhang, B.; Wu, S.; Ding, X.; Zhu, J.; Li, Q. Use of multiplatform SAR imagery in mining deformation monitoring with dense vegetation coverage: A case study in the Fengfeng Mining area, China. Remote Sens. 2021, 13, 3091. [Google Scholar] [CrossRef]
- Li, C.; Zhang, W. Monitoring Application and Research Progress Based on InSAR Technology. North. Archit. 2020, 5, 15–19. [Google Scholar]
- Zheng, Y. Advantages and development prospects of InSAR technology in surface deformation measurement. China Stand. 2019, 16, 211–212. [Google Scholar]
- Zhu, C.; Deng, K.; Zhang, J.; Zhang, Y.; Fan, H.; Zhang, L. Three-dimensional deformation field detection based on multi-source SAR imagery in mining area. J. Coal Sci. 2014, 39, 673–678. [Google Scholar]
- Zhu, J.; Li, Z.; Hu, J. InSAR deformation monitoring method and research progress. J. Surv. Mapp. 2017, 46, 1717–1733. [Google Scholar]
- Ishwar, S.G.; Kumar, D. Application of DInSAR in mine surface subsidence monitoring and prediction. Curr. Sci. 2017, 112, 46–51. [Google Scholar] [CrossRef]
- Onuma, T.; Ohkawa, S. Detection of surface deformation related with CO2 injection by DInSAR at in Salah, Algeria. Energy Procedia 2009, 1, 2177–2184. [Google Scholar] [CrossRef]
- Dong, S.; Samsonov, S.; Yin, H.; Ye, S.; Cao, Y. Time-series analysis of subsidence associated with rapid urbanization in Shanghai, China measured with SBAS InSAR method. Environ. Earth Sci. 2014, 72, 677–691. [Google Scholar] [CrossRef]
- Zhang, L.; Ding, X.; Lu, Z. Modeling PSInSAR time series without phase unwrapping. IEEE Trans. Geosci. Remote Sens. 2010, 49, 547–556. [Google Scholar] [CrossRef]
- Bao, J.; Luo, X.; Liu, G.; Chang, L.; Wu, S. An improved distributed scatterers extraction algorithm for monitoring tattered ground surface subsidence with DSInSAR: A case study of loess landform in Tongren county. Int. J. Appl. Earth Obs. 2021, 99, 102322. [Google Scholar] [CrossRef]
- Liu, Z.; Qiu, H.; Zhu, Y.; Liu, Y.; Yang, D.; Ma, S.; Zhang, J.; Wang, Y.; Wang, L.; Tang, B. Efficient identification and monitoring of landslides by time-series InSAR combining single-and multi-look phases. Remote Sens. 2022, 14, 1026. [Google Scholar] [CrossRef]
- Li, Y.; Yang, K.; Zhang, J.; Hou, Z.; Wang, S.; Ding, X. Research on time series InSAR monitoring method for multiple types of surface deformation in mining area. Nat. Hazards 2022, 114, 2479–2508. [Google Scholar] [CrossRef]
- Chen, Y.; Yu, S.; Tao, Q.; Liu, G.; Wang, F. Accuracy verification and correction of D-InSAR and SBAS-InSAR in monitoring mining surface subsidence. Remote Sens. 2021, 13, 4365. [Google Scholar] [CrossRef]
- Zhu, J.; Yang, Z.; Li, Z. Recent progress in retrieving predicting mining-induced 3D displacements using, InSAR. Acta Geod. Cartogr. Sin. 2019, 48, 135. [Google Scholar] [CrossRef]
- Yang, Z.; Li, Z.; Zhu, J.; Wang, Y.; Wu, L. Use of SAR/InSAR in mining deformation monitoring, parameter inversion, and forward predictions: A review. IEEE Geosci. Remote Sens. Mag. 2020, 8, 71–90. [Google Scholar] [CrossRef]
- Wang, R.; Wu, K.; He, Q.; He, Y.; Gu, Y.; Wu, S. A novel method of monitoring surface subsidence law based on probability integral model combined with active and passive remote sensing data. Remote Sens. 2022, 14, 299. [Google Scholar] [CrossRef]
- Yang, L. Discussion on random medium theory. Mine Surv. 1987, 2, 32–34+29. [Google Scholar]
- Liu, B.; Liao, G.; Yan, R. Electrical simulation calculation of rock movement. Mine Surv. 1981, 2, 40–44. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Working Face Name | Mining Time (Year/Month) | Strike Length/m | Dip Length/m | Average Inclination/° | Average Thickness/m | Average Buried Depth/m | Mining Thickness |
|---|---|---|---|---|---|---|---|
| 1034 | September 2018 to August 2019 | 753.73 | 132 | 22 | 3.4 | 420 | 3400 |
| Satellite | Product Type | Imaging Mode | Polarization Mode | Replay Cycle | Band | Number of Scenes | Time Range | Resolution /m | Wave Length/cm |
|---|---|---|---|---|---|---|---|---|---|
| Sentinel-1A | SLC | IW | VV | 12 d | C | 58 | June 2018 to September 2020 | 5 × 20 | 5.6 |
| The Parameters of the PIM | Normal Range | Precision |
|---|---|---|
| q | 0.01~1.4 | 0.01 |
| 1.0~3.0 | 0.01 | |
| 70~90° | 0.1 | |
| −30~40 | 0.1 |
| Subsidence Factor | Tangent of Major Influence Angle | Main Propagation Angle | Offset of the Inflection Point S |
|---|---|---|---|
| 0.91 | 1.80 | 86.25 | 9.8 |
| Maximum Subsidence Value/mm | Height of the Waterlogging Boundary from the Surface/mm | Maximum Water Depth/mm | Volume of the Subsidence Area/m3 | Waterlogging Area/m2 | Waterlogging Volume/m3 |
|---|---|---|---|---|---|
| 1357 | 526 | 831 | 189,978 | 107,622 | 97,726 |
| Inversion Method | Traditional Method | |||
|---|---|---|---|---|
| RMSE | Relative Error | RMSE | Relative Error | |
| Water depth/mm | 99 mm | 9.9% | 182 mm | 18.2% |
| Date | Water Depth/mm | Water Volume/m³ | Water Area/m2 | Subsidence Area Volume/m³ |
|---|---|---|---|---|
| 9 June 2020 | 542 | 22,515 | 26,848 | 189,715 |
| 3 July 2020 | 617 | 48,767 | 53,984 | 189,825 |
| 8 August 2020 | 831 | 97,726 | 107,622 | 189,978 |
| 1 September 2020 | 867 | 163,826 | 181,540 | 189,715 |
| Date | ||||
|---|---|---|---|---|
| 9 June 2020 | 0.901 | 1.80 | 86.06 | 9.95 |
| 3 July 2020 | 0.900 | 1.80 | 86.00 | 9.86 |
| 8 August 2020 | 0.91 | 1.80 | 86.25 | 9.80 |
| 1 September 2020 | 0.907 | 1.80 | 86.00 | 10 |
| Inversion Parameter Information | Eliminate 10% | Eliminate 20% | Eliminate 30% | Eliminate 40% | Eliminate 50% | Eliminate 60% | Eliminate 70% | Eliminate 80% |
|---|---|---|---|---|---|---|---|---|
| 0.901 | 0.900 | 0.900 | 0.900 | 0.900 | 0.902 | 0.902 | 0.955 | |
| 1.80 | 1.82 | 1.81 | 1.81 | 1.80 | 1.81 | 1.82 | 1.80 | |
| 86.06 | 86.00 | 86.57 | 86.00 | 86.00 | 86.25 | 86.13 | 90.00 | |
| 9.95 | 9.54 | 10.00 | 9.99 | 9.99 | 9.88 | 9.89 | 5.71 |
| Date | Maximum Subsidence Value/mm | Water Depth/mm | Water Volume/m³ | Water Area/m2 | Subsidence Area Volume/m³ | Working Face Advance Distance/m |
|---|---|---|---|---|---|---|
| 24 September 2018 | 0 | 0 | 0 | 0 | 0 | 0 |
| 29 December 2018 | 100 | 0 | 0 | 0 | 11,040 | 314 |
| 23 March 2019 | 455 | 0 | 0 | 0 | 31,010 | 542 |
| 27 June 2019 | 777 | 0 | 0 | 0 | 67,169 | 736 |
| 1 October 2019 | 1218 | 0 | 0 | 0 | 145,025 | 748 |
| 17 January 2020 | 1263 | 0 | 0 | 0 | 160,987 | 748 |
| 4 May 2020 | 1325 | 0 | 0 | 0 | 180,086 | 748 |
| 9 June 2020 | 1355 | 542 | 22,515 | 26,848 | 189,715 | 748 |
| 3 July 2020 | 1356 | 617 | 48,767 | 53,984 | 189,825 | 748 |
| 8 August 2020 | 1357 | 831 | 97,726 | 107,622 | 189,978 | 748 |
| 1 September 2020 | 1355 | 867 | 163,826 | 181,540 | 189,715 | 748 |
| 7 October 2020 | 1356 | 526 | 18,876 | 17,284 | 189,825 | 748 |
| 12 November 2020 | 1357 | 470 | 7345 | 7375 | 189,978 | 748 |
| 6 December 2020 | 1357 | 503 | 12,012 | 11,292 | 189,978 | 748 |
| 11 January 2021 | 1357 | 0 | 0 | 0 | 189,978 | 748 |
| 4 February 2021 | 1357 | 0 | 0 | 0 | 189,978 | 748 |
| 12 March 2021 | 1357 | 0 | 0 | 0 | 189,978 | 748 |
| 5 April 2021 | 1357 | 0 | 0 | 0 | 189,978 | 748 |
| 4 May 2021 | 1357 | 0 | 0 | 0 | 189,978 | 748 |
| 4 June 2021 | 1357 | 0 | 0 | 0 | 189,978 | 748 |
| 10 July 2021 | 1357 | 0 | 0 | 0 | 189,978 | 748 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, X.; Qiu, M.; Zhang, P.; Ni, E.; Zhang, J.; Quan, L.; Liu, H.; Yang, X. A New Inversion Method for Obtaining Underwater Spatial Information of Subsidence Waterlogging Based on InSAR Technology and Subsidence Prediction. Water 2024, 16, 1002. https://doi.org/10.3390/w16071002
Zhu X, Qiu M, Zhang P, Ni E, Zhang J, Quan L, Liu H, Yang X. A New Inversion Method for Obtaining Underwater Spatial Information of Subsidence Waterlogging Based on InSAR Technology and Subsidence Prediction. Water. 2024; 16(7):1002. https://doi.org/10.3390/w16071002
Chicago/Turabian StyleZhu, Xiaojun, Mingjian Qiu, Pengfei Zhang, Errui Ni, Jianxin Zhang, Li’ao Quan, Hui Liu, and Xiaoyu Yang. 2024. "A New Inversion Method for Obtaining Underwater Spatial Information of Subsidence Waterlogging Based on InSAR Technology and Subsidence Prediction" Water 16, no. 7: 1002. https://doi.org/10.3390/w16071002
APA StyleZhu, X., Qiu, M., Zhang, P., Ni, E., Zhang, J., Quan, L., Liu, H., & Yang, X. (2024). A New Inversion Method for Obtaining Underwater Spatial Information of Subsidence Waterlogging Based on InSAR Technology and Subsidence Prediction. Water, 16(7), 1002. https://doi.org/10.3390/w16071002