

Influence of Rolling Resistance and Particle Size Distribution in the Simulation of Sand Infiltration into the Static Gravel Bed



Abstract
1. Introduction
2. Governing Equations and Rolling Resistance Models
2.1. Constant Directional Torque (CDT) Model
2.2. Elastic-Plastic Spring-Dashpot (EPSD) Model
3. Methodology and Numerical Setup
4. Results and Discussion
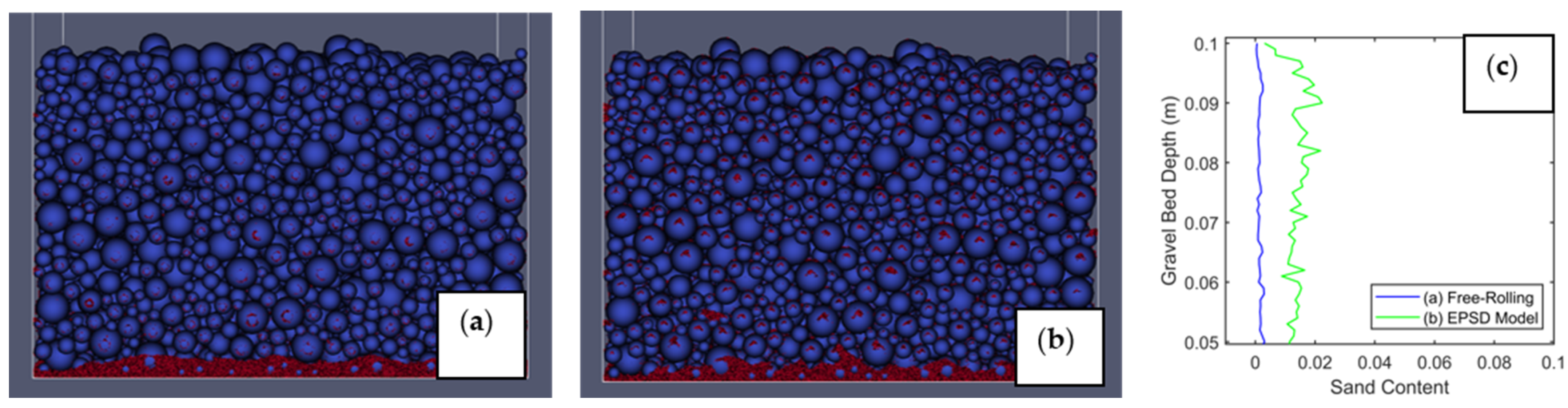
4.1. Effects of Non-Sphericity and Irregularities in Particle Shape
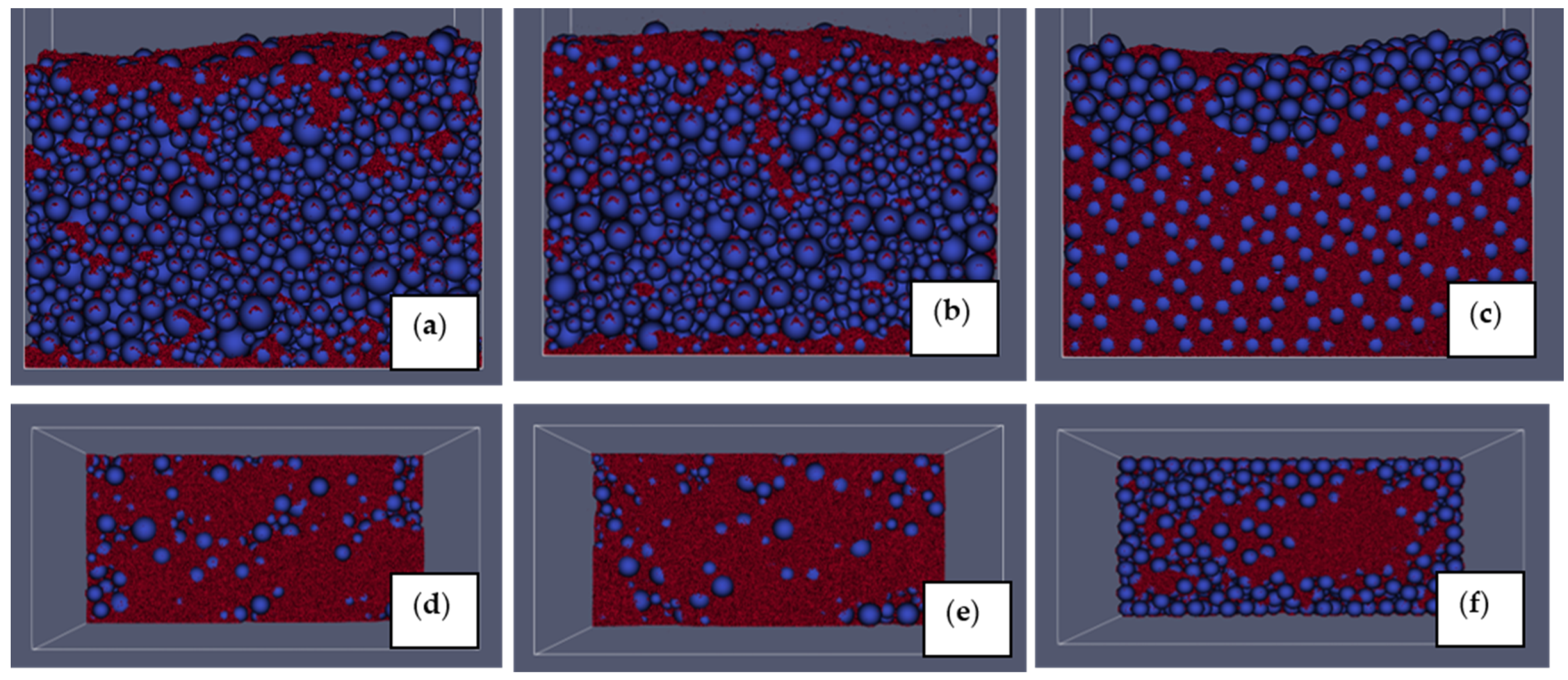
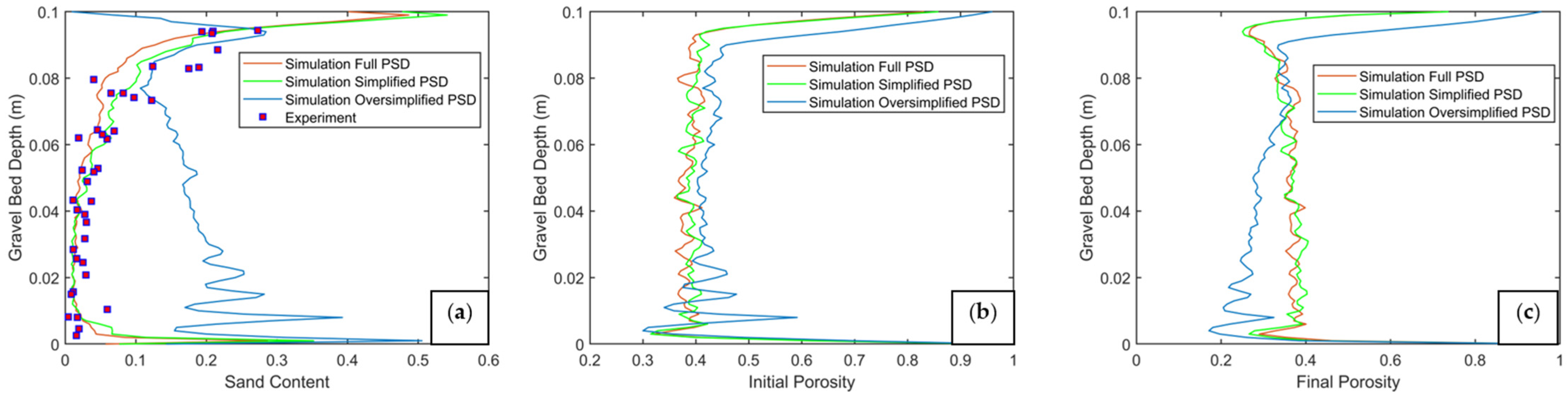
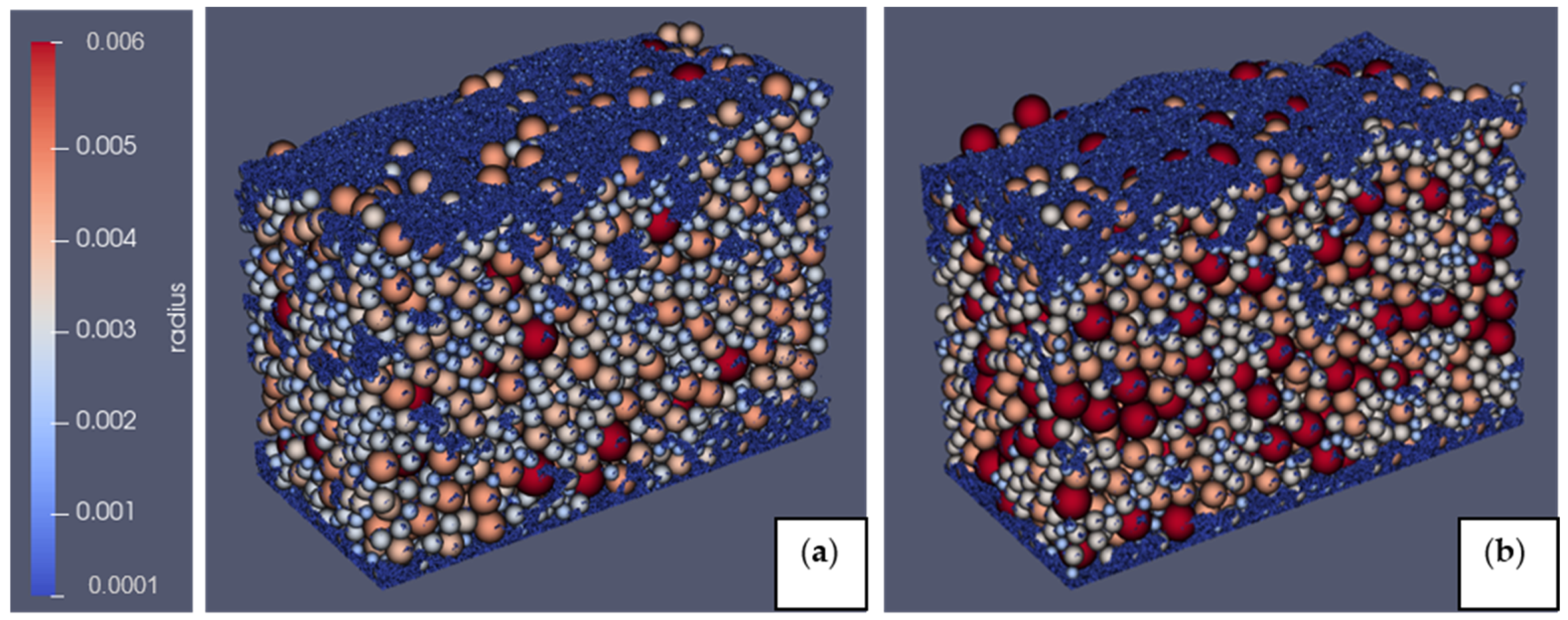
4.2. Effects of Particle Size Distribution (PSD)
5. Conclusions
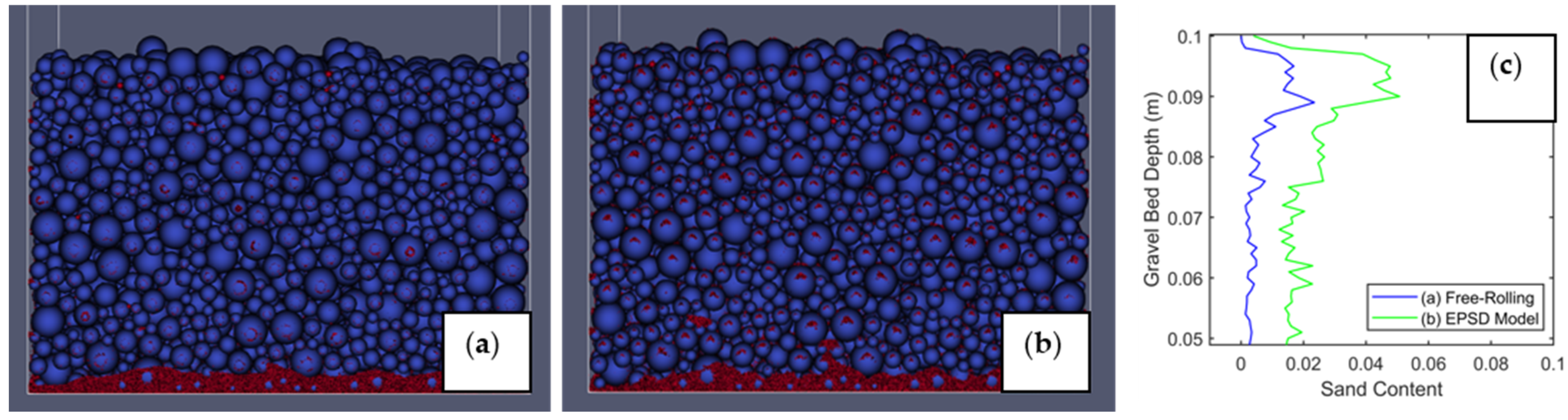
- Rolling resistance models efficiently incorporate effects of non-sphericity and irregularities in particle shape when modeling quasi-static systems such as sand infiltration into a static gravel bed. For the bridging cases (D15,Gravel/D85,Sand < 10.6), rolling resistance models are vital for correct or anticipated infiltration behavior.
- Contrary to the bridging cases, for the percolation cases (D15,Gravel/D85,sand > 15.4), excluding the rolling friction model (free-rolling case) could capture the physically correct percolation type of infiltration, indicating that when pore size becomes significantly larger than infiltrating sand particles, particle shape effects tend to vanish. Shape effects are more important for coarser than finer sand particles. Therefore, the rolling resistance models in modeling percolation should be avoided.
- A comparison of different rolling resistance models shows that all the considered models (CDT, EPSD, and EPSD2) are able to capture particle shape effects wherever the shape effects seem to be vital. The EPSD model performs marginally better than the other two models. Applying these models, we can implicitly consider the effects of particle shape by adding artificial resistance to particle rotation. These models can help obtain the correct infiltration behavior for bridging cases, but the inclusion of rolling resistance can also lead to non-physical and undesirable results for percolation cases. Therefore, it should be used carefully depending on the relative sand–gravel size.
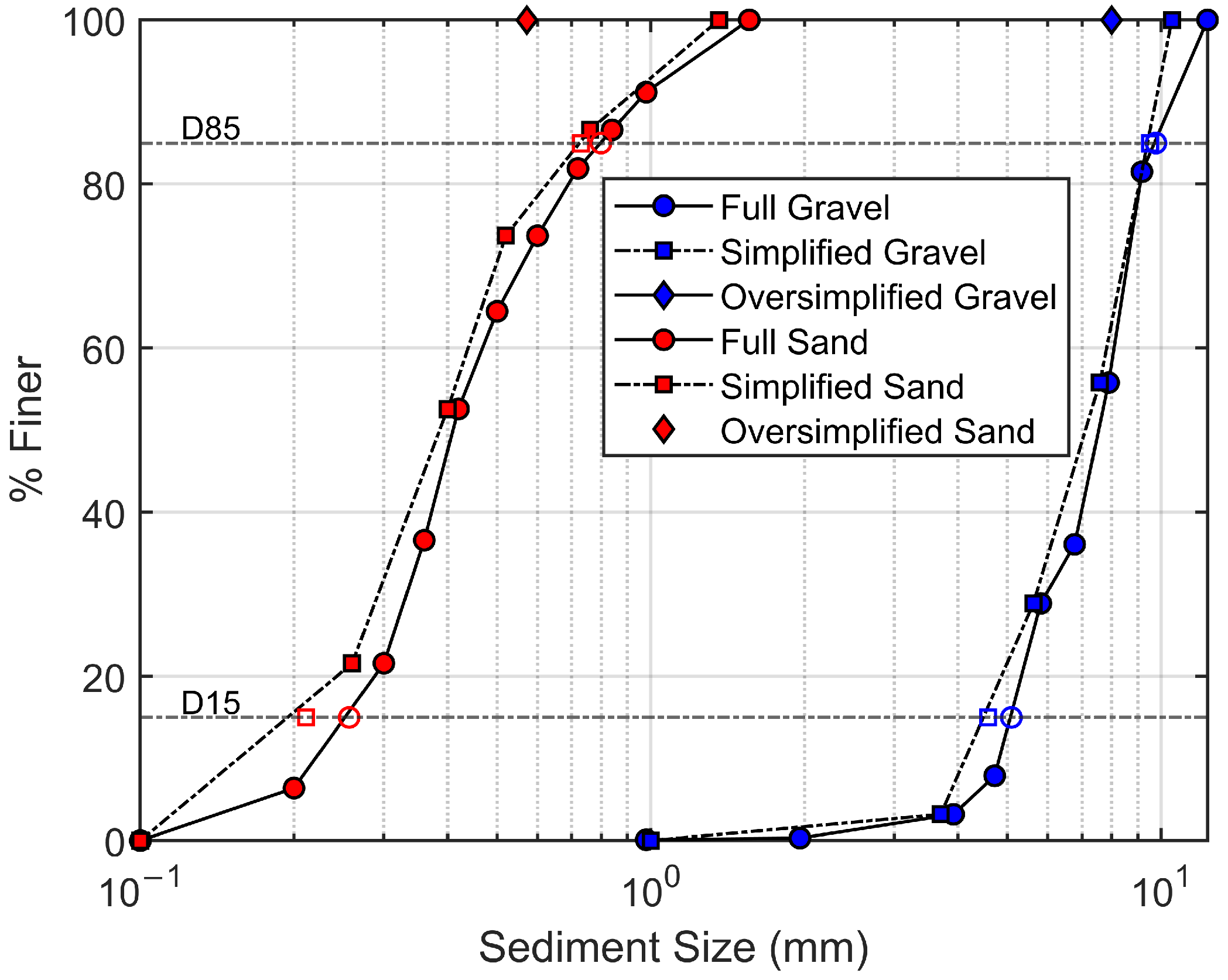
- The DEM method is computationally expensive and limited to a definite number of particles with the currently available computational resources, architecture, and solution algorithms. This usually requires the particle size distributions (PSDs) for sand and gravel to be simplified to represent the required volume or mass of sediments by a lower number of particles. Simplification is necessary to realize the numerical simulations, but oversimplification could entirely modify the characteristics of gravel beds and infiltrating sand, resulting in completely different infiltration behaviors than anticipated.
- A sufficient number of gravel and sand classes (4–5 grain classes) could be a good compromise between the accuracy and realizability of numerical simulations with a decent domain size, which can capture the bulk behavior of sand and gravel beds. Simplified cases (with four grain classes for gravel and five for sand) could capture the correct bridging behavior and perform very well in statistical evaluation against the experimental data. For this purpose, D15,Gravel/D85,Sand could be considered as a measure of the gravel bed and infiltrating sand characteristics. If the D15,Gravel/D85,Sand remain similar to the exact/full PSDs for sand and gravel, then the simplification is justified and should not lead to any non-physical behavior concerning the infiltration process being investigated.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Ock, G.; Gaeuman, D.; McSloy, J.; Kondolf, G.M. Ecological functions of restored gravel bars, the Trinity River, California. Ecol. Eng. 2015, 83, 49–60. [Google Scholar] [CrossRef]
- Hauer, F.R.; Locke, H.; Dreitz, V.J.; Hebblewhite, M.; Lowe, W.H.; Muhlfeld, C.C.; Nelson, C.R.; Proctor, M.F.; Rood, S.B. Gravel-bed river floodplains are the ecological nexus of glaciated mountain landscapes. Sci. Adv. 2016, 2, e1600026. [Google Scholar] [CrossRef]
- Casas-Mulet, R.; Pander, J.; Prietzel, M.; Geist, J. The HydroEcoSedimentary tool: An integrated approach to characterise interstitial hydro-sedimentary and associated ecological processes. River Res. Appl. 2021, 37, 988–1002. [Google Scholar] [CrossRef]
- Greig, S.M.; Sear, D.A.; Carling, P.A. A review of factors influencing the availability of dissolved oxygen to incubating salmonid embryos. Hydrol. Process. 2007, 21, 323–334. [Google Scholar] [CrossRef]
- Wood, P.J.; Armitage, P.D. Biological Effects of Fine Sediment in the Lotic Environment. Environ. Manag. 1997, 21, 203–217. [Google Scholar] [CrossRef]
- Walling, D.; Owens, P.; Carter, J.; Leeks, G.; Lewis, S.; Meharg, A.; Wright, J. Storage of sediment-associated nutrients and contaminants in river channel and floodplain systems. Appl. Geochem. 2003, 18, 195–220. [Google Scholar] [CrossRef]
- Jones, J.I.; Collins, A.L.; Naden, P.S.; Sear, D.A. The relationship between fine sediment and macrophytes in rivers. River Res. Appl. 2012, 28, 1006–1018. [Google Scholar] [CrossRef]
- Wooster, J.K.; Dusterhoff, S.R.; Cui, Y.; Sklar, L.S.; Dietrich, W.E.; Malko, M. Sediment supply and relative size distribution effects on fine sediment infiltration into immobile gravels. Water Resour. Res. 2008, 44. [Google Scholar] [CrossRef]
- East, A.E.; Pess, G.R.; Bountry, J.A.; Magirl, C.S.; Ritchie, A.C.; Logan, J.B.; Randle, T.J.; Mastin, M.C.; Minear, J.T.; Duda, J.J.; et al. Large-scale dam removal on the Elwha River, Washington, USA: River channel and floodplain geomorphic change. Geomorphology 2015, 228, 765–786. [Google Scholar] [CrossRef]
- Bednarek, A.T. Undamming rivers: A review of the ecological impacts of dam removal. Environ. Manag. 2001, 27, 803–814. [Google Scholar] [CrossRef]
- Born, S.M.; Genskow, K.D.; Filbert, T.L.; Hernandez-Mora, N.; Keefer, M.L.; White, K.A. Socioeconomic and Institutional Dimensions of Dam Removals: The Wisconsin Experience. Environ. Manag. 1998, 22, 359–370. [Google Scholar] [CrossRef]
- Cui, Y.; Parker, G.; Braudrick, C.; Dietrich, W.E.; Cluer, B. Dam Removal Express Assessment Models (DREAM). J. Hydraul. Res. 2006, 44, 291–307. [Google Scholar] [CrossRef]
- Cui, Y.; Wilcox, A.C. Numerical modeling of sediment transport upon dam removal: Application to Marmot Dam in Sandy River, Oregon. In Sedimentation Engineering, ASCE Manual; Oregon: Reston, VA, USA, 2005; Volume 54. [Google Scholar]
- Doyle, M.W.; Stanley, E.H.; Harbor, J.M. Channel adjustments following two dam removals in Wisconsin. Water Resour. Res. 2003, 39, 1011. [Google Scholar] [CrossRef]
- Pollard, A.I.; Reed, T. Benthic invertebrate assemblage change following dam removal in a Wisconsin stream. Hydrobiologia 2004, 513, 51–58. [Google Scholar] [CrossRef]
- Stanley, E.H.; Luebke, M.A.; Doyle, M.W.; Marshall, D.W.I. Short-Term Changes in Channel Form and Macroinvertebrate Communities Following Low-Head Dam Removal. J. N. Am. Benthol. Soc. 2002, 21, 172–187. [Google Scholar] [CrossRef]
- Minshall, G.W.; Royer, T.V.; Robinson, C.T. Response of the Cache Creek macroinvertebrates during the first 10 years following disturbance by the 1988 Yellowstone wildfires. Can. J. Fish. Aquat. Sci. 2001, 58, 1077–1088. [Google Scholar] [CrossRef]
- Vieira, N.K.M.; Clements, W.H.; Guevara, L.S.; Jacobs, B.F. Resistance and resilience of stream insect communities to repeated hydrologic disturbances after a wildfire. Freshw. Biol. 2004, 49, 1243–1259. [Google Scholar] [CrossRef]
- Lisle, T.E. Sediment transport and resulting deposition in spawning gravels, north coastal California. Water Resour. Res. 1989, 25, 1303–1319. [Google Scholar] [CrossRef]
- Swanson, F.J.; Dyrness, C.T. Impact of clear-cutting and road construction on soil erosion by landslides in the western Cascade Range, Oregon. Geology 1975, 3, 393. [Google Scholar] [CrossRef]
- Parker, G.; Cui, Y.; Imran, J.; Dietrich, W.E. Flooding in the lower Ok Tedi, Papua New Guinea due to the disposal of mine tailings and its amelioration. In Proceedings of the Recent Trends of Floods and Their Preventive Measures, Hokkaido River Disaster Prevention Res. Res. Cent., Sapporo, Japan, 20–21 June 1996. [Google Scholar]
- Yu, A.B.; Standish, N. Estimation of the porosity of particle mixtures by a linear-mixture packing model. Ind. Eng. Chem. Res. 1991, 30, 1372–1385. [Google Scholar] [CrossRef]
- Yu, A.B.; Standish, N. Limitation of proposed mathematical models for the porosity estimation of nonspherical particle mixtures. Ind. Eng. Chem. Res. 1993, 32, 2179–2182. [Google Scholar] [CrossRef]
- Yu, A.B.; Zou, R.P.; Standish, N. Modifying the Linear Packing Model for Predicting the Porosity of Nonspherical Particle Mixtures. Ind. Eng. Chem. Res. 1996, 35, 3730–3741. [Google Scholar] [CrossRef]
- Lauck, T. A Simulation Model for the Infiltration of Sediment into Spawning Gravel. Master’s Thesis, Humboldt State University, Arcata, CA, USA, 1991. [Google Scholar]
- Herrero, A.; Berni, C. Sand infiltration into a gravel bed: A mathematical model. Water Resour. Res. 2016, 52, 8956–8969. [Google Scholar] [CrossRef]
- Shen, E.; Liu, G.; Jia, Y.; Dan, C.; Abd Elbasit, M.A.; Liu, C.; Gu, J.; Shi, H. Effects of raindrop impact on the resistance characteristics of sheet flow. J. Hydrol. 2021, 592, 125767. [Google Scholar] [CrossRef]
- Einstein, H.A. Deposition of Suspended Particles in a Gravel Bed. J. Hydr. Div. 1968, 94, 1197–1206. [Google Scholar] [CrossRef]
- Herrero, A.; Berni, C.; Camenen, B.; Thollet, F. Laboratory Analysis on silt Infiltration into a Gravel bed. Modélisation Physique de L’infiltration Dans un lit de Graviers. 2015. Available online: https://hal.science/hal-01362697 (accessed on 27 May 2024).
- NCASI. Factors Affecting Changes in the Percent of Fine Sediment in Gravel Bedded Channels; Technical Bulletin No. 0354; NCASI: Research Triangle Park, NC, USA, 1981. [Google Scholar]
- Diplas, P.; Parker, G. Deposition and removal of fines in gravel-bed streams. Dyn. Gravel-Bed Rivers 1992, 313–329. [Google Scholar]
- Evans, E.; Wilcox, A.C. Fine sediment infiltration dynamics in a gravel-bed river following a sediment pulse. River Res. Applic. 2014, 30, 372–384. [Google Scholar] [CrossRef]
- Lunt, I.A.; Bridge, J.S. Formation and preservation of open-framework gravel strata in unidirectional flows. Sedimentology 2007, 54, 71–87. [Google Scholar] [CrossRef]
- Beschta, R.L.; Jackson, W.L. The Intrusion of Fine Sediments into a Stable Gravel Bed. J. Fish. Res. Bd. Can. 1979, 36, 204–210. [Google Scholar] [CrossRef]
- Carling, P.A. Deposition of Fine and Coarse Sand in an Open-Work Gravel Bed. Can. J. Fish. Aquat. Sci. 1984, 41, 263–270. [Google Scholar] [CrossRef]
- Frostick, L.E.; Lucas, P.M.; Reid, I. The infiltration of fine matrices into coarse-grained alluvial sediments and its implications for stratigraphical interpretation. J. Geol. Soc. 1984, 141, 955–965. [Google Scholar] [CrossRef]
- Schälchli, U. The clogging of coarse gravel river beds by fine sediment. Hydrobiologia 1992, 235–236, 189–197. [Google Scholar] [CrossRef]
- Gibson, S.; Abraham, D.; Heath, R.; Schoellhamer, D. Vertical gradational variability of fines deposited in a gravel framework. Sedimentology 2009, 56, 661–676. [Google Scholar] [CrossRef]
- Gibson, S.; Abraham, D.; Heath, R.; Schoellhamer, D. Bridging Process Threshold for Sediment Infiltrating into a Coarse Substrate. J. Geotech. Geoenviron. Eng. 2010, 136, 402–406. [Google Scholar] [CrossRef]
- Cui, Y.; Wooster, J.K.; Baker, P.F.; Dusterhoff, S.R.; Sklar, L.S.; Dietrich, W.E. Theory of Fine Sediment Infiltration into Immobile Gravel Bed. J. Hydraul. Eng. 2008, 134, 1421–1429. [Google Scholar] [CrossRef]
- Bui, V.H.; Bui, M.D.; Rutschmann, P. Combination of Discrete Element Method and Artificial Neural Network for Predicting Porosity of Gravel-Bed River. Water 2019, 11, 1461. [Google Scholar] [CrossRef]
- Bui, V.H.; Bui, M.D.; Rutschmann, P. Advanced Numerical Modeling of Sediment Transport in Gravel-Bed Rivers. Water 2019, 11, 550. [Google Scholar] [CrossRef]
- Jaiswal, A.; Bui, M.D.; Rutschmann, P. On the process of fine sediment infiltration into static gravel bed: A CFD–DEM modelling perspective. River Res. Appl. 2024, 40, 29–48. [Google Scholar] [CrossRef]
- Elmsahli, H.S.; Sinka, I.C. A discrete element study of the effect of particle shape on packing density of fine and cohesive powders. Comput. Part. Mech. 2021, 8, 183–200. [Google Scholar] [CrossRef]
- Soltanbeigi, B.; Papanicolopulos, S.A.; Ooi, J.Y. An insight into the micro-mechanism of the directional constant torque model in quasi-static flow. In Proceedings of the CFDEM® Project User Group Meeting and Workshop, Linz, Austria, 14–15 March 2016. [Google Scholar]
- Guo, Y.; Yang, Y.; Yu, X. Influence of particle shape on the erodibility of non-cohesive soil: Insights from coupled CFD–DEM simulations. Particuology 2018, 39, 12–24. [Google Scholar] [CrossRef]
- Fukumoto, Y.; Sakaguchi, H.; Murakami, A. The role of rolling friction in granular packing. Granul. Matter 2013, 15, 175–182. [Google Scholar] [CrossRef]
- Favier, J.F.; Abbaspour-Fard, M.H.; Kremmer, M.; Raji, A.O. Shape representation of axi-symmetrical, non-spherical particles in discrete element simulation using multi-element model particles. Eng. Comput. 1999, 16, 467–480. [Google Scholar] [CrossRef]
- Favier, J.F.; Abbaspour-Fard, M.H.; Kremmer, M. Modeling Nonspherical Particles Using Multisphere Discrete Elements. J. Eng. Mech. 2001, 127, 971–977. [Google Scholar] [CrossRef]
- Potyondy, D.O.; Cundall, P.A. A bonded-particle model for rock. Int. J. Rock Mech. Min. Sci. 2004, 41, 1329–1364. [Google Scholar] [CrossRef]
- Cundall, P.A.; Strack, O.D.L. A discrete numerical model for granular assemblies. Géotechnique 1979, 29, 47–65. [Google Scholar] [CrossRef]
- Yang, Y.; Yuan, W.; Hou, J.; You, Z. Review on physical and chemical factors affecting fines migration in porous media. Water Res. 2022, 214, 118172. [Google Scholar] [CrossRef]
- You, Z.; Osipov, Y.; Bedrikovetsky, P.; Kuzmina, L. Asymptotic model for deep bed filtration. Chem. Eng. J. 2014, 258, 374–385. [Google Scholar] [CrossRef]
- Badalyan, A.; You, Z.; Aji, K.; Bedrikovetsky, P.; Carageorgos, T.; Zeinijahromi, A. Size exclusion deep bed filtration: Experimental and modelling uncertainties. Rev. Sci. Instrum. 2014, 85, 15111. [Google Scholar] [CrossRef]
- Yuan, H.; You, Z.; Shapiro, A.; Bedrikovetsky, P. Improved population balance model for straining-dominant deep bed filtration using network calculations. Chem. Eng. J. 2013, 226, 227–237. [Google Scholar] [CrossRef]
- Johnson, K.L. Contact Mechanics, 1st ed.; with Corrections; Cambridge University Press: Cambridge, UK, 1987. [Google Scholar]
- Iwashita, K.; Oda, M. Rolling Resistance at Contacts in Simulation of Shear Band Development by DEM. J. Eng. Mech. 1998, 124, 285–292. [Google Scholar] [CrossRef]
- Bardet, J.P.; Huang, Q. Numerical modeling of micropolar effects in idealized granular materials. Am. Soc. Mech. Eng. Mater. Div. (Publ.) 1992, 37, 85–92. [Google Scholar]
- Bardet, J.P. Observations on the effects of particle rotations on the failure of idealized granular materials. Mech. Mater. 1994, 18, 159–182. [Google Scholar] [CrossRef]
- Oda, M.; Konishi, J.; Nemat-Nasser, S. Experimental micromechanical evaluation of strength of granular materials: Effects of particle rolling. Mech. Mater. 1982, 1, 269–283. [Google Scholar] [CrossRef]
- Calvetti, F.; Combe, G.; Lanier, J. Experimental micromechanical analysis of a 2D granular material: Relation between structure evolution and loading path. Mech. Cohes.-Frict. Mater. 1997, 2, 121–163. [Google Scholar] [CrossRef]
- Misra, A.; Jiang, H. Measured kinematic fields in the biaxial shear of granular materials. Comput. Geotech. 1997, 20, 267–285. [Google Scholar] [CrossRef]
- Ai, J.; Chen, J.-F.; Rotter, J.M.; Ooi, J.Y. Assessment of rolling resistance models in discrete element simulations. Powder Technol. 2011, 206, 269–282. [Google Scholar] [CrossRef]
- Bérard, A.; Patience, G.S.; Blais, B. Experimental methods in chemical engineering: Unresolved CFD-DEM. Can. J. Chem. Eng. 2020, 98, 424–440. [Google Scholar] [CrossRef]
- Kloss, C.; Goniva, C.; Hager, A.; Amberger, S.; Pirker, S. Models, algorithms and validation for opensource DEM and CFD-DEM. Prog. Comput. Fluid Dyn. Int. J. 2012, 12, 140. [Google Scholar] [CrossRef]
- Latham, J.P.; Munjiza, A.; Lu, Y. On the prediction of void porosity and packing of rock particulates. Powder Technol. 2002, 125, 10–27. [Google Scholar] [CrossRef]
- Iseya, F.; Ikeda, H. Pulsations in Bedload Transport Rates Induced by a Longitudinal Sediment Sorting: A Flume Study using Sand and Gravel Mixtures. Geogr. Ann. Ser. A-Phys. Geogr. 1987, 69, 15–27. [Google Scholar] [CrossRef]
- Honjo, Y.; Veneziano, D. Improved filter criterion for cohesionless soils. J. Geotech. Eng. 1989, 115, 75–94. [Google Scholar] [CrossRef]
- Indraratna, B.; Vafai, F. Analytical Model for Particle Migration within Base Soil-Filter System. J. Geotech. Geoenviron. Eng. 1997, 123, 100–109. [Google Scholar] [CrossRef]
- Sherard, J.L.; Dunnigan, L.P. Filters and leakage control in embankment dams. Int. J. Rock Mech. Min. Sci. Geomech. Abstr. 1986, 23, 202. [Google Scholar]
- Indraratna, B.; Locke, M.R. Design methods for granular filters—Critical review. Proc. Inst. Civ. Eng.-Geotech. Eng. 1999, 137, 137–147. [Google Scholar] [CrossRef]
- Twenhofel, W.H. The Rounding of Sand Grains. J. Sediment. Res. 1945, 15, 59–71. [Google Scholar] [CrossRef]
- Novák-Szabó, T.; Sipos, A.Á.; Shaw, S.; Bertoni, D.; Pozzebon, A.; Grottoli, E.; Sarti, G.; Ciavola, P.; Domokos, G.; Jerolmack, D.J. Universal characteristics of particle shape evolution by bed-load chipping. Sci. Adv. 2018, 4, eaao4946. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rolling Resistance Test | Experiment 1 (run1) | Experiment 2 (run2) a | Experiment 3 (run3) a |
|---|---|---|---|
| Process observed in the experiment | Bridging | Bridging | Percolation |
| Rolling resistance models | Free-rolling, CDT, EPSD, and EPSD2 | Free-Rolling and EPSD | Free-Rolling and EPSD |
| Particle size distribution (number of grain classes) | 4 Gravel and 5 sand | 4 Gravel and 5 sand | 4 Gravel and 4 sand |
| Young’s modulus (Y) | 5 × 106 | 5 × 106 | 5 × 106 |
| Poisson’s ratio (ϑ) | 0.45 | 0.45 | 0.45 |
| Coefficient of restitution (e) | 0.4 | 0.4 | 0.4 |
| Coefficient of friction (μ) | 0.4 | 0.4 | 0.4 |
| Coefficient of rolling friction () | 0.5 b | 0.5 b | 0.5 b |
| Coefficient of rolling viscous damping () | 0.5 b | 0.5 b | 0.5 b |
| DEM time step (s) | 1 × 10−6 | 1 × 10−6 | 1 × 10−6 |
| Bulk porosity of initial gravel bed | 0.407 | 0.407 | 0.407 |
| Sand insertion rate (kg/s) | 0.01 | 0.01 | 0.01 |
| Simulation run time (s) | 17 | 5 | 4 |
| Total number of particles (sand + gravel) | 2,267,073 | 2,527,852 | 2,872,822 |
| Particle Size Distribution Test c | Full PSD | Simplified PSD | Oversimplified PSD |
| Experiment considered | Experiment 1 (run1) | Experiment 1 (run1) | Experiment 1 (run1) |
| Particle size distribution (number of grain classes) | 9 Gravel and 10 sand | 4 gravel and 5 sand | 1 Gravel and 1 sand |
| Rolling resistance model | EPSD | EPSD | EPSD |
| DEM time step (s) | 1 × 10−6 | 1 × 10−6 | 5 × 10−5 |
| Bulk porosity of initial gravel bed | 0.407 | 0.407 | 0.454 |
| Sand insertion rate (kg/s) | 0.01 | 0.01 | 0.01 |
| Simulation run time (s) | 15.8 | 18.3 | 40 |
| Total number of particles (sand + gravel) | 2,207,512 | 2,400,200 | 1,613,433 |
| Simulation Time (s) | Bulk Porosity | ||
|---|---|---|---|
| CDT Model | EPSD Model | EPSD2 Model | |
| 1 | 0.409 (initial bulk porosity) | ||
| 14 | 0.3665 | 0.3672 | 0.3670 |
| 17 | 0.3578 | 0.3596 | 0.3592 |
| 18 | 0.3550 | 0.3574 | - |
| Statistical Parameter | CDT Model | EPSD Model | EPSD2 Model | Free-Rolling |
|---|---|---|---|---|
| MAE | 0.0278 | 0.0234 | 0.0232 | 0.0708 |
| MSE | 0.0018 | 0.0011 | 0.0011 | 0.0109 |
| RMSE | 0.0427 | 0.0334 | 0.0336 | 0.1046 |
| R | 0.8029 | 0.8890 | 0.8875 | −0.1528 |
| Statistical Parameter | Full PSDs * | Simplified PSDs | Oversimplified PSDs # |
|---|---|---|---|
| MAE | 0.0264 | 0.0234 | 0.1329 |
| MSE | 0.0015 | 0.0011 | 0.0251 |
| RMSE | 0.0387 | 0.0334 | 0.1584 |
| R | 0.8765 | 0.8890 | −0.0139 |
| Computational Performance | Full PSDs * | Simplified PSDs | Oversimplified PSDs |
|---|---|---|---|
| Number of grain classes | 9 Gravel and 10 sand | 4 Gravel and 5 sand | 1 Gravel and 1 sand |
| Simulation time (s) | 15.8 | 18 | 40 |
| Number of particles (sand + gravel) | 2,207,512 | 2,400,200 | 1,573,155 |
| CPU hours | 23,040 | 23,040 | 5760 |
| Simulation time reached after 1 day (s) | 12 | 14 | 40 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jaiswal, A.; Bui, M.D.; Rüther, N.; Rutschmann, P. Influence of Rolling Resistance and Particle Size Distribution in the Simulation of Sand Infiltration into the Static Gravel Bed. Water 2024, 16, 1947. https://doi.org/10.3390/w16141947
Jaiswal A, Bui MD, Rüther N, Rutschmann P. Influence of Rolling Resistance and Particle Size Distribution in the Simulation of Sand Infiltration into the Static Gravel Bed. Water. 2024; 16(14):1947. https://doi.org/10.3390/w16141947
Chicago/Turabian StyleJaiswal, Atul, Minh Duc Bui, Nils Rüther, and Peter Rutschmann. 2024. "Influence of Rolling Resistance and Particle Size Distribution in the Simulation of Sand Infiltration into the Static Gravel Bed" Water 16, no. 14: 1947. https://doi.org/10.3390/w16141947
APA StyleJaiswal, A., Bui, M. D., Rüther, N., & Rutschmann, P. (2024). Influence of Rolling Resistance and Particle Size Distribution in the Simulation of Sand Infiltration into the Static Gravel Bed. Water, 16(14), 1947. https://doi.org/10.3390/w16141947