
Assessment of Flood Hazard Mapping Using a DEM-Based Approach and 2D Hydrodynamic Modeling





Abstract
1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Hydrodynamic Model
2.2.1. Event Simulation
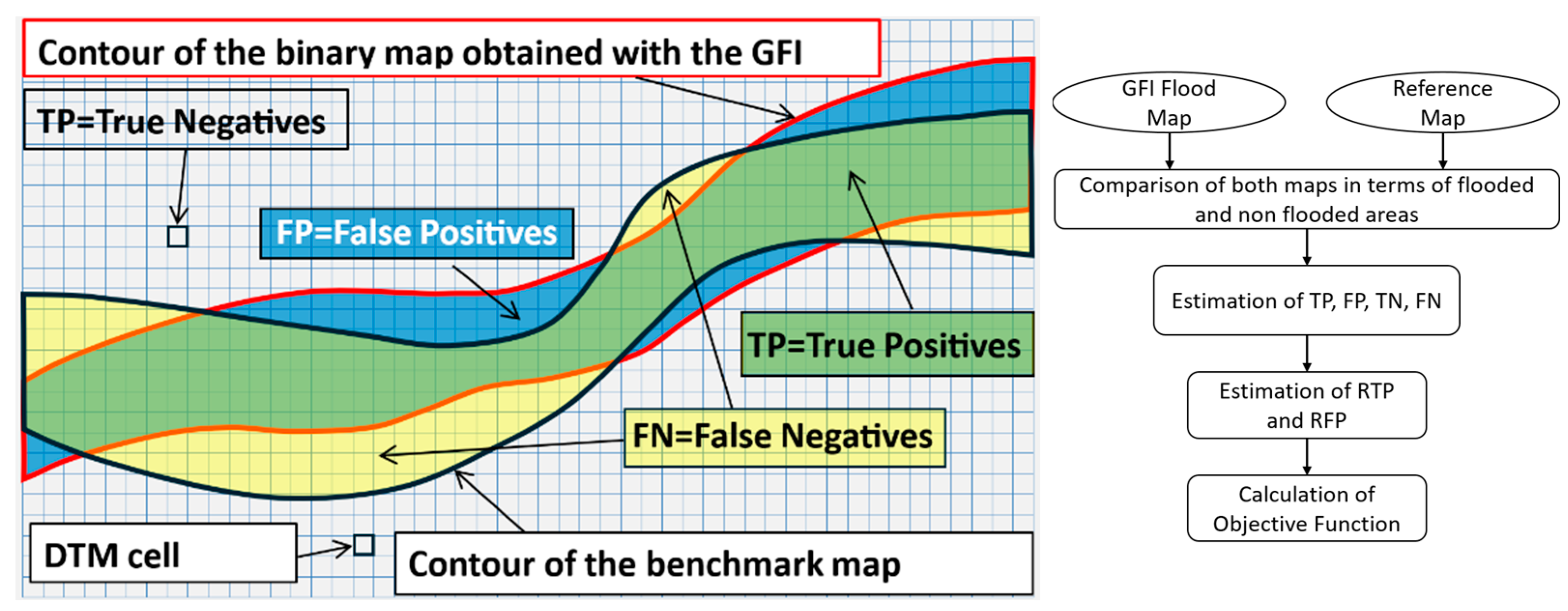
2.2.2. Flood Reference Map
2.3. Geomorphologic Model
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- CRED/UNISDR. Human Cost of Weather Related Disasters 1995–2015; Centre for Research of the Epidemiology of Disasters: Université Catholique de Louvain, Ottignies-Louvain-la-Neuve, Belgium; The United Nations Office for Disaster Risk Reduction: Geneva, Switzerland, 2016; 30p, Available online: https://www.unisdr.org/2015/docs/climatechange/COP21_WeatherDisastersReport_2015_FINAL.pdf (accessed on 18 June 2024).
- Tavares da Costa, R.; Manfreda, S.; Luzzi, V.; Samela, C.; Mazzoli, P.; Castellarin, A.; Bagli, S. A Web Application for Hydrogeomorphic Flood Hazard Mapping. Environ. Model. Softw. 2019, 118, 172–186. [Google Scholar] [CrossRef]
- Wang, C.; Wang, K.; Liu, D.; Zhang, L.; Li, M.; Imran Khan, M.; Li, T.; Cui, S. Development and Application of a Comprehensive Assessment Method of Regional Flood Disaster Risk Based on a Refined Random Forest Model Using Beluga Whale Optimization. J. Hydrol. 2024, 633, 130963. [Google Scholar] [CrossRef]
- Alfieri, L.; Burek, P.; Feyen, L.; Forzieri, G. Global Warming Increases the Frequency of River Floods in Europe. Hydrol. Earth Syst. Sci. 2015, 19, 2247–2260. [Google Scholar] [CrossRef]
- Tehrany, M.S.; Pradhan, B.; Jebur, M.N. Flood Susceptibility Mapping Using a Novel Ensemble Weights-of-Evidence and Support Vector Machine Models in GIS. J. Hydrol. 2014, 512, 332–343. [Google Scholar] [CrossRef]
- Ebtehaj, I.; Bonakdari, H. A Comprehensive Comparison of the Fifth and Sixth Phases of the Coupled Model Intercomparison Project Based on the Canadian Earth System Models in Spatio-Temporal Variability of Long-Term Flood Susceptibility Using Remote Sensing and Flood Frequency Analy. J. Hydrol. 2023, 617, 128851. [Google Scholar] [CrossRef]
- Amiri, A.; Soltani, K.; Ebtehaj, I.; Bonakdari, H. A Novel Machine Learning Tool for Current and Future Flood Susceptibility Mapping by Integrating Remote Sensing and Geographic Information Systems. J. Hydrol. 2024, 632, 130936. [Google Scholar] [CrossRef]
- Amellah, O.; El Morabiti, K.; Maftei, C.; Papatheodorou, C.; Buta, C.; Bounab, A.; Ouchar Al-Djazouli, M. Topographic Indices and Two-Dimensional Hydrodynamic Modelling for Flood Hazard Mapping in a Data-Scarce Plain Area: A Case Study of Oued Laou Catchment (Northern of Morocco). Geocarto Int. 2022, 37, 13596–13617. [Google Scholar] [CrossRef]
- Ferrari, A.; Dazzi, S.; Vacondio, R.; Mignosa, P. Enhancing the Resilience to Flooding Induced by Levee Breaches in Lowland Areas: A Methodology Based on Numerical Modelling. Nat. Hazards Earth Syst. Sci. 2020, 20, 59–72. [Google Scholar] [CrossRef]
- European Union. Directive 2007/60/EC of the European Council and European Parliament of 23 October 2007 on the Assessment and Management of Flood Risks. Official Journal of the European Union 2007, 27–34. Available online: https://eur-lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CELEX:32007L0060 (accessed on 18 June 2024).
- Hailemariam, F.M.; Brandimarte, L.; Dottori, F. Investigating the Influence of Minor Hydraulic Structures on Modeling Flood Events in Lowland Areas. Hydrol. Process. 2014, 28, 1742–1755. [Google Scholar] [CrossRef]
- Jafarzadegan, K.; Merwade, V. A DEM-Based Approach for Large-Scale Floodplain Mapping in Ungauged Watersheds. J. Hydrol. 2017, 550, 650–662. [Google Scholar] [CrossRef]
- Deiana, C.; Deidda, R.; Viola, F. Geomorphic Floodplain Mapping in Small Mediterranean Catchments Using LiDAR Data. Adv. Water Resour. 2023, 178, 104493. [Google Scholar] [CrossRef]
- Costabile, P.; Costanzo, C.; Macchione, F. Comparative Analysis of Overland Flow Models Using Finite Volume Schemes. J. Hydroinform. 2012, 14, 122–135. [Google Scholar] [CrossRef]
- Bellos, V.; Tsakiris, G. A Hybrid Method for Flood Simulation in Small Catchments Combining Hydrodynamic and Hydrological Techniques. J. Hydrol. 2016, 540, 331–339. [Google Scholar] [CrossRef]
- Magnini, A.; Lombardi, M.; Persiano, S.; Tirri, A.; Lo Conti, F.; Castellarin, A. Machine-Learning Blends of Geomorphic Descriptors: Value and Limitations for Flood Hazard Assessment across Large Floodplains. Nat. Hazards Earth Syst. Sci. 2022, 22, 1469–1486. [Google Scholar] [CrossRef]
- Fattahi, A.M.; Hosseini, K.; Farzin, S.; Mousavi, S.F. An Innovative Approach of GSSHA Model in Flood Analysis of Large Watersheds Based on Accuracy of DEM, Size of Grids, and Stream Density. Appl. Water Sci. 2023, 13, 33. [Google Scholar] [CrossRef]
- Ennouini, W.; Fenocchi, A.; Petaccia, G.; Persi, E.; Sibilla, S. A Complete Methodology to Assess Hydraulic Risk in Small Ungauged Catchments Based on HEC-RAS 2D Rain-On-Grid Simulations. Nat. Hazards 2024, 120, 7381–7409. [Google Scholar] [CrossRef]
- Nguyen, P.; Thorstensen, A.; Sorooshian, S.; Hsu, K.; AghaKouchak, A.; Sanders, B.; Koren, V.; Cui, Z.; Smith, M. A High Resolution Coupled Hydrologic–Hydraulic Model (HiResFlood-UCI) for Flash Flood Modeling. J. Hydrol. 2016, 541, 401–420. [Google Scholar] [CrossRef]
- Sanders, B.F.; Schubert, J.E. PRIMo: Parallel Raster Inundation Model. Adv. Water Resour. 2019, 126, 79–95. [Google Scholar] [CrossRef]
- Aureli, F.; Prost, F.; Vacondio, R.; Dazzi, S.; Ferrari, A. A GPU-Accelerated Shallow-Water Scheme for Surface Runoff Simulations. Water 2020, 12, 637. [Google Scholar] [CrossRef]
- Horritt, M.S.; Bates, P.D. Evaluation of 1D and 2D Numerical Models for Predicting River Flood Inundation. J. Hydrol. 2002, 268, 87–99. [Google Scholar] [CrossRef]
- Manfreda, S.; Samela, C.; Sole, A.; Fiorentino, M. Flood-Prone Areas Assessment Using Linear Binary Classifiers Based on Morphological Indices. In Vulnerability, Uncertainty, and Risk; American Society of Civil Engineers: Reston, VA, USA, 2014; pp. 2002–2011. [Google Scholar]
- Wingfield, T.; Macdonald, N.; Peters, K.; Spees, J.; Potter, K. Natural Flood Management: Beyond the Evidence Debate. Area 2019, 51, 743–751. [Google Scholar] [CrossRef]
- Vacondio, R.; Dal Palù, A.; Ferrari, A.; Mignosa, P.; Aureli, F.; Dazzi, S. A Non-Uniform Efficient Grid Type for GPU-Parallel Shallow Water Equations Models. Environ. Model. Softw. 2017, 88, 119–137. [Google Scholar] [CrossRef]
- Xia, X.; Liang, Q.; Ming, X. A Full-Scale Fluvial Flood Modelling Framework Based on a High-Performance Integrated Hydrodynamic Modelling System (HiPIMS). Adv. Water Resour. 2019, 132, 103392. [Google Scholar] [CrossRef]
- Blöschl, G.; Buttinger-kreuzhuber, A.; Cornel, D.; Eisl, J.; Hofer, M. Hyper-Resolution Flood Hazard Mapping at the National Scale. Nat. Hazards Earth Syst. Sci. 2023, 24, 2071–2091. [Google Scholar] [CrossRef]
- Jamali, B.; Haghighat, E.; Ignjatovic, A.; Leitão, J.P.; Deletic, A. Machine Learning for Accelerating 2D Flood Models: Potential and Challenges. Hydrol. Process. 2021, 35, e14064. [Google Scholar] [CrossRef]
- Hill, B.; Liang, Q.; Bosher, L.; Chen, H.; Nicholson, A. A Systematic Review of Natural Flood Management Modelling: Approaches, Limitations, and Potential Solutions. J. Flood Risk Manag. 2023, 16, e12899. [Google Scholar] [CrossRef]
- Degiorgis, M.; Gnecco, G.; Gorni, S.; Roth, G.; Sanguineti, M.; Taramasso, A.C. Classifiers for the Detection of Flood-Prone Areas Using Remote Sensed Elevation Data. J. Hydrol. 2012, 470–471, 302–315. [Google Scholar] [CrossRef]
- Dodov, B.A.; Foufoula-Georgiou, E. Floodplain Morphometry Extraction from a High-Resolution Digital Elevation Model: A Simple Algorithm for Regional Analysis Studies. IEEE Geosci. Remote Sens. Lett. 2006, 3, 410–413. [Google Scholar] [CrossRef]
- Nardi, F.; Annis, A.; Di Baldassarre, G.; Vivoni, E.R.; Grimaldi, S. GFPLAIN250m, a Global High-Resolution Dataset of Earth’s Floodplains. Sci. Data 2019, 6, 180309. [Google Scholar] [CrossRef]
- Nardi, F.; Vivoni, E.R.; Grimaldi, S. Investigating a Floodplain Scaling Relation Using a Hydrogeomorphic Delineation Method. Water Resour. Res. 2006, 42, W09409. [Google Scholar] [CrossRef]
- Nardi, F.; Biscarini, C.; Di Francesco, S.; Manciola, P.; Ubertini, L. Comparing a Large-Scale Dem-Based Floodplain Delineation Algorithm with Standard Flood Maps: The Tiber River Basin Case Study. Irrig. Drain. 2013, 62, 11–19. [Google Scholar] [CrossRef]
- Nobre, A.D.; Cuartas, L.A.; Hodnett, M.; Rennó, C.D.; Rodrigues, G.; Silveira, A.; Waterloo, M.; Saleska, S. Height Above the Nearest Drainage—A Hydrologically Relevant New Terrain Model. J. Hydrol. 2011, 404, 13–29. [Google Scholar] [CrossRef]
- Annis, A.; Karpack, M.; Morrison, R.R.; Nardi, F. On the Influence of River Basin Morphology and Climate on Hydrogeomorphic Floodplain Delineations. Adv. Water Resour. 2022, 159, 104078. [Google Scholar] [CrossRef]
- Beven, K.J.; Kirkby, M.J. A Physically Based, Variable Contributing Area Model of Basin Hydrology. Hydrol. Sci. Bull. 1979, 24, 43–69. [Google Scholar] [CrossRef]
- Manfreda, S.; Di Leo, M.; Sole, A. Detection of Flood-Prone Areas Using Digital Elevation Models. J. Hydrol. Eng. 2011, 16, 781–790. [Google Scholar] [CrossRef]
- Manfreda, S.; Nardi, F.; Samela, C.; Grimaldi, S.; Taramasso, A.C.; Roth, G.; Sole, A. Investigation on the Use of Geomorphic Approaches for the Delineation of Flood Prone Areas. J. Hydrol. 2014, 517, 863–876. [Google Scholar] [CrossRef]
- Samela, C.; Manfreda, S.; De Paola, F.; Giugni, M.; Sole, A.; Fiorentino, M. DEM-Based Approaches for the Delineation of Flood-Prone Areas in an Ungauged Basin in Africa. J. Hydrol. Eng. 2016, 21, 06015010. [Google Scholar] [CrossRef]
- Manfreda, S.; Samela, C.; Gioia, A.; Consoli, G.G.; Iacobellis, V.; Giuzio, L.; Cantisani, A.; Sole, A. Flood-Prone Areas Assessment Using Linear Binary Classifiers Based on Flood Maps Obtained from 1D and 2D Hydraulic Models. Nat. Hazards 2015, 79, 735–754. [Google Scholar] [CrossRef]
- Samela, C.; Troy, T.J.; Manfreda, S. Geomorphic Classifiers for Flood-Prone Areas Delineation for Data-Scarce Environments. Adv. Water Resour. 2017, 102, 13–28. [Google Scholar] [CrossRef]
- Samela, C.; Albano, R.; Sole, A.; Manfreda, S. A GIS Tool for Cost-Effective Delineation of Flood-Prone Areas. Comput. Environ. Urban Syst. 2018, 70, 43–52. [Google Scholar] [CrossRef]
- Tavares da Costa, R.; Zanardo, S.; Bagli, S.; Hilberts, A.G.J.; Manfreda, S.; Samela, C.; Castellarin, A. Predictive Modeling of Envelope Flood Extents Using Geomorphic and Climatic-Hydrologic Catchment Characteristics. Water Resour. Res. 2020, 56, e2019WR026453. [Google Scholar] [CrossRef]
- Dazzi, S.; Vacondio, R.; Mignosa, P. Integration of a Levee Breach Erosion Model in a GPU-Accelerated 2D Shallow Water Equations Code. Water Resour. Res. 2019, 55, 682–702. [Google Scholar] [CrossRef]
- O’callaghan, J.F. The Extraction of Ordered Vector Drainage Networks from Elevation Data. Comput. Vis. Graph. Image Process. 1984, 28, 323–344. [Google Scholar] [CrossRef]
- Liang, Q.; Borthwick, A.G.L. Adaptive Quadtree Simulation of Shallow Flows with Wet-Dry Fronts over Complex Topography. Comput. Fluids 2009, 38, 221–234. [Google Scholar] [CrossRef]
- Kurganov, A.; Petrova, G. A Second-Order Well-Balanced Positivity Preserving Central-Upwind Scheme for the Saint-Venant System. Commun. Math. Sci. 2007, 5, 133–160. [Google Scholar] [CrossRef]
- Toro, E.F. Shock-Capturing Methods for Free-Surface Shallow Flows; Wiley and Sons Ltd.: Chichester, UK; New York, NY, USA; London, UK, 2001; 309p, ISBN 9780471987666. [Google Scholar]
- USDA Natural Resources Conservation Service (NRCS). National Engineering Handbook: Part 630—Hydrology; USDA Soil Conservation Service (SCS): Washington, DC, USA, 2004.
- Manfreda, S.; Samela, C. A Digital Elevation Model Based Method for a Rapid Estimation of Flood Inundation Depth. J. Flood Risk Manag. 2019, 12, e12541. [Google Scholar] [CrossRef]
- Leopold, L.B.; Maddok, T. The Hydraulic Geometry of Stream Channels and Some Physiographic Implications; U.S. Government Printing Office: Washington, DC, USA, 1953. [CrossRef]
- Albertini, C.; Miglino, D.; Iacobellis, V.; De Paola, F.; Manfreda, S. Delineation of Flood-Prone Areas in Cliffed Coastal Regions through a Procedure Based on the Geomorphic Flood Index. J. Flood Risk Manag. 2022, 15, e12766. [Google Scholar] [CrossRef]
- Gupta, V.K.; Mesa, O.J. Hydraulic-Geometric in River Networks Horton Laws for Hydraulic-Geometric Variables and Their Scaling Exponents in Self-Similar River Networks Hydraulic-Geometric in River Networks. Nonlin. Process. Geophys. Discuss 2014, 1, 705–753. [Google Scholar] [CrossRef]
- Fawcett, T. An Introduction to ROC Analysis. Pattern Recognit. Lett. 2006, 27, 861–874. [Google Scholar] [CrossRef]
- Samela, C.; Carisi, F.; Domeneghetti, A.; Petruccelli, N.; Castellarin, A.; Iacobini, F.; Rinaldi, A.; Zammuto, A.; Brath, A. A Methodological Framework for Flood Hazard Assessment for Land Transport Infrastructures. Int. J. Disaster Risk Reduct. 2023, 85, 103491. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Type | Data Source | Acquisition Date | Availability |
|---|---|---|---|
| DEM—30 m of the whole Enza basin—AW3D30 | https://www.eorc.jaxa.jp/ALOS/en/dataset/aw3d30/aw3d30_e.htm (accessed on 16 May 2023) | 2019 | Free upon login |
| DEM—1 m of the main Enza valley floor from a LiDAR survey. | CGR S.p.A.—Compagnia Generale Riprese Aeree. https://www.cgrspa.com/ (accessed on 1 June 2023) | 2017 | On request to CGR |
| Rainfall data from 16 rain gauges (Enza basin and nearby) | ARPAE—Agenzia Regionale Protezione Ambiente. Dext3R—https://simc.arpae.it/dext3r/ (accessed on 1 June 2019) | 2017 | Free upon login |
| Map of soil types | https://mappegis.regione.emilia-romagna.it/moka/ckan/suolo/Carta_dei_suoli_250k_ed_1994.zip (accessed on 1 June 2019) | 2000 | Free upon login |
| Map of land use | https://geoportale.regione.emilia-romagna.it/approfondimenti/contenuti-allegati/ (accessed on 1 June 2019) | 2014 | Free upon login |
| Station Name | Drainage Area (km2) | Water Level Alarms (m) | Maximum Water Levels (m) | ||||
|---|---|---|---|---|---|---|---|
| # | Low | Medium | High | Historical | Dec. 2017 | ||
| 1 | Lonza | 62 | 1.26 | 1.86 | 2.96 | 2.09 | n/a |
| 2 | Selvanizza | 85 | 1.76 | 2.46 | 3.26 | 3.16 | n/a |
| 3 | Compiano | 101 | 1.28 | 1.58 | 2.68 | 1.85 | 1.45 |
| 4 | Vetto | 299 | 1.66 | 2.36 | 3.26 | 4.28 | 4.28 |
| 5 | Cedogno | 417 | 1.41 | 1.91 | 2.71 | 3.45 | 3.45 |
| 6 | Guardasone | 454 | 0.29 | 0.79 | 1.19 | 1.20 | 1.20 |
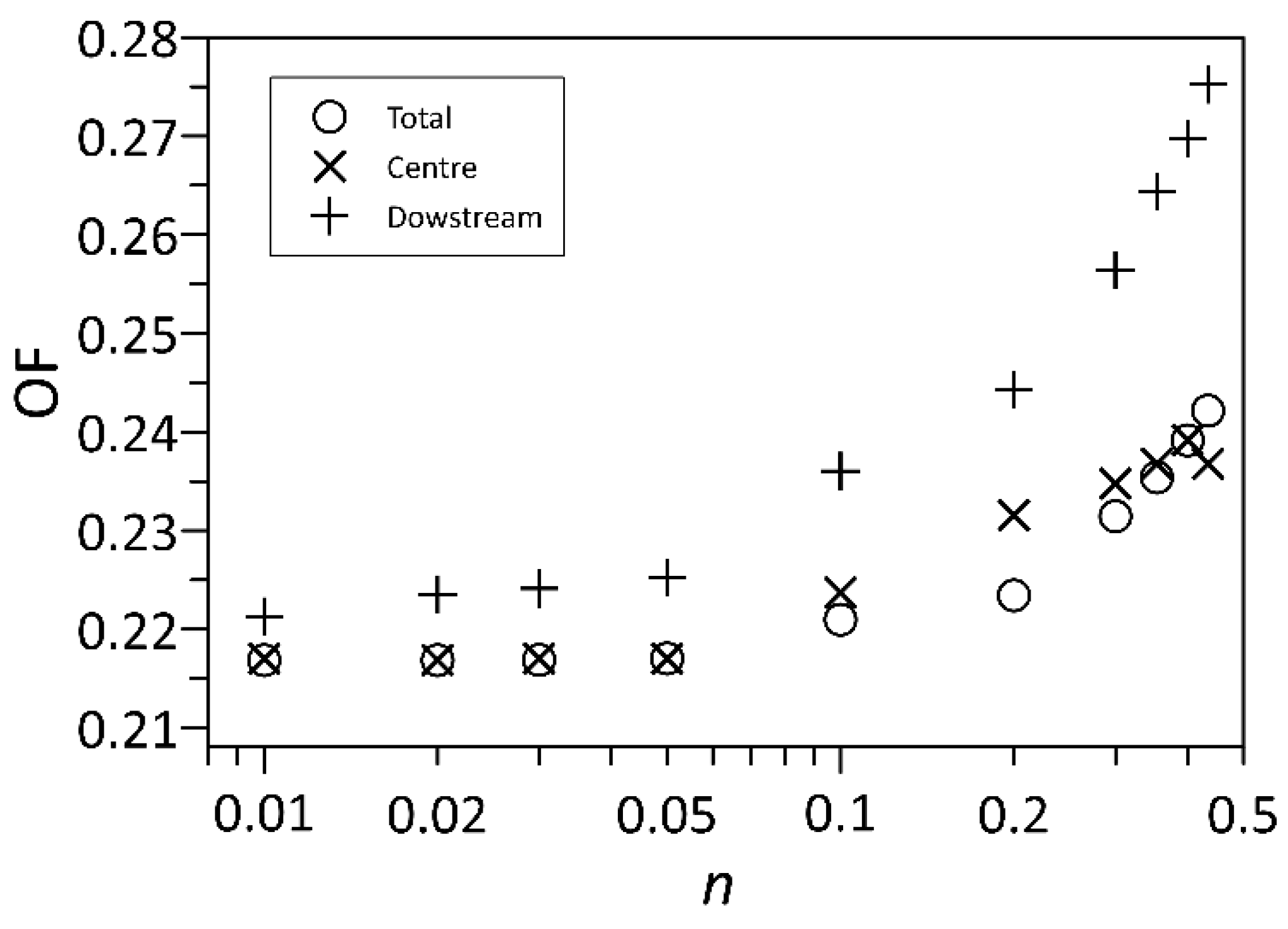
| Calibration Map | Threshold Value τ | RTP | RFP | OF |
|---|---|---|---|---|
| Total | −0.459 | 0.804 | 0.039 | 0.235 |
| Center | −0.452 | 0.800 | 0.036 | 0.237 |
| Downstream | −0.349 | 0.749 | 0.014 | 0.264 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Amellah, O.; Mignosa, P.; Prost, F.; Aureli, F. Assessment of Flood Hazard Mapping Using a DEM-Based Approach and 2D Hydrodynamic Modeling. Water 2024, 16, 1844. https://doi.org/10.3390/w16131844
Amellah O, Mignosa P, Prost F, Aureli F. Assessment of Flood Hazard Mapping Using a DEM-Based Approach and 2D Hydrodynamic Modeling. Water. 2024; 16(13):1844. https://doi.org/10.3390/w16131844
Chicago/Turabian StyleAmellah, Omayma, Paolo Mignosa, Federico Prost, and Francesca Aureli. 2024. "Assessment of Flood Hazard Mapping Using a DEM-Based Approach and 2D Hydrodynamic Modeling" Water 16, no. 13: 1844. https://doi.org/10.3390/w16131844
APA StyleAmellah, O., Mignosa, P., Prost, F., & Aureli, F. (2024). Assessment of Flood Hazard Mapping Using a DEM-Based Approach and 2D Hydrodynamic Modeling. Water, 16(13), 1844. https://doi.org/10.3390/w16131844